
基于D2D通信系统的无人机辅助物联网保密通信频谱共享方法
2024-03-05 07:35丁徐飞刘光杰戴跃伟
无线电工程 2024年3期
丁徐飞,田 文,刘光杰,戴跃伟
(南京信息工程大学 电子与信息工程学院,江苏 南京 210044)
0 引言
无线通信的蓬勃发展为移动用户带来了便利的同时给通信安全带来了挑战。保密通信作为无线系统中一种新的安全范式,在应对恶意用户干扰方面发挥着重要作用[1]。敌方通常试图监视通信过程或降低预期接收方处的信号质量。由于易于部署和高机动性,无人机(UAV)辅助保密通信正逐渐成为对抗非法用户的一种重要手段。具体来说,UAV的灵活移动能够为高质量视距通信信道的选择提供新的解决方案[2]。此外,在通信覆盖面角度,UAV为基站信号覆盖范围外的用户之间的保密通信做出了巨大贡献[3],可通过动态调整UAV的位置或者跟踪服务用户的轨迹,以获得更好的信道状态。
然而,现有UAV辅助保密通信的优化工作主要集中在发射机的发射功率优化或UAV的飞行轨迹优化[4]。因此,UAV辅助保密通信优化工作仍不够成熟,尤其是在频谱利用率优化方面。众所周知,UAV会重用地面已有通信频谱进行通信[5]。因此,本文拟通过与地面设备到设备(Device-to-Device,D2D)通信系统的频谱共享优化来提高UAV辅助保密通信性能。值得一提的是,UAV的引入必然使保密通信过程复杂化,并将进一步影响保密容量的优化问题。
目前,一些研究人员研究了如何提高UAV辅助保密通信性能。文献[6]研究了UAV对地和地对UAV通信系统,通过交替迭代优化发送方的传输功率和UAV的飞行轨迹,最大化UAV和接收方的保密速率。文献[7]引入UAV作为干扰源,对窃听者进行干扰以最大化系统的保密速率。文献[8]采用联合优化轨迹和传输功率的方法,尽量减少UAV到地面物联网设备的信息传输时间。此外,还通过转换目标函数,最大限度地提高物联网的保密能力。此外也有研究工作专注UAV辅助无线通信系统中的保密能源效率问题[9-11]。文献[9]研究了双用户正交频分多址网络无线信息传输的保密能量效率最大化问题。考虑将用户接收的信号分割为两部分,分别用于信息解码和能量收集,提出了一种功率分配和功率分裂算法,以最大限度地提高该系统的保密能力并拥有最低的能量消耗。文献[10]讨论了有缓存的UAV在保密通信中的保密容量最大化和能源消耗问题,UAV具有缓存可以存储流行信息以直接满足用户需求而不需要和基站通信来降低通信时长。通过联合优化UAV的轨迹、发射功率和用户调度来最大化系统的保密容量。文献[11]考虑了具有多个隐藏的窃听方的UAV辅助保密通信系统,通过交替进行UAV的轨迹规划和功率分配,在最优的能源消耗下最大化极端情况下系统的保密速率。
本文总结了UAV保密通信的相关研究,发现现有的关于UAV保密通信的研究中,频谱利用率普遍不高,且鲜有研究者从频谱共享的角度讨论UAV辅助的基于地面D2D对的保密容量优化问题。因此,将研究UAV和地面D2D通信系统的频谱共享方法以辅助保密通信系统最大化保密容量。然而,由于UAV和地面D2D通信系统的频谱共享问题是非凸的,难以求解。因此,提出了一种基于块坐标下降(Block Corrdinate Dessent, BCD)法的联合凸优化算法,并通过仿真验证该算法在不同参数下的有效性。
1 频谱共享模型和问题阐述
1.1 基于UAV的D2D保密通信系统频谱共享模型
UAV和地面D2D保密通信系统模型如图1所示。考虑一个UAV和地面D2D通信系统共享频谱的无线保密通信系统的模型。该系统包含了发送方、接收方、窃听方、D对地面用户和一架中继UAV。假设发送方和接收方之间的通信链路被障碍物阻断(如高山等),因此无法直接通信。地面D2D通信系统的配对规则是事先确定的,例如,D2D发送方默认只向距离最近的D2D接收方发送信息。发送方和接收方、窃听方之间没有直接通信链路,UAV作为中继为发送方传输隐蔽信息给合法的接收方,同时窃听方尝试窃取机密信息。假设发送方和接收方各配备一个天线,UAV配备2根天线,一根用于接收信息,一根用于传输信息。2根天线在同一频谱上工作,即UAV处在全双工模式。同时,即使使用了自干扰消除技术,也不能忽略传输天线间的自干扰[12]。

图1 UAV和地面D2D保密通信系统模型Fig.1 System model of the UAV enabled secure communications with D2D pairs
为了方便计算UAV、发送方、接收方和窃听方之间的距离,建立一个如图1所示的三维笛卡尔坐标系。定义发送方、接收方和窃听方的坐标分别为qs=[xs,ys,0],qb=[xb,yb,0],qw=[xw,yw,0]。为避免不必要的能源消耗,假设UAV在固定高度H飞行,最大飞行速度为V,UAV完成传输任务需要的总时间为T,将飞行时间T划分为N份,则每个时隙长度为δ=T/N。因此,可以用一系列离散点的集合表示UAV的轨迹{x[n],y[n],H},n=(1,2,…,N)。
1.2 基于UAV的D2D保密通信系统保密容量最大化问题
由于在实践中,UAV的起始位置和着陆位置通常是预先确定的,假设UAV的起飞点和降落点分别为{x0,y0,H}和{xF,yF,H}。因此,UAV的轨迹存在约束:
(x[n]-x[n-1])2+(y[n]-y[n-1])2≤(Vδ)2,∀n∈N。
(1)
系统中各节点间的无线信道都视为无线视距通信。这个假设是合理且有效的,因为有研究表明,当UAV处于一定高度时,视距信道占UAV和地面设备间信道的主体地位[13]。在时隙n(n=1,2,…,N)时,发送方到UAV、地面设备接收器(D2D Receiver,D2D-Rx)到UAV、UAV到设备发射器(D2D Transmitter,D2D-Tx)、UAV到接收方和窃听方的信道增益分别为:
(2)

此外,地面用户之间的信道建模为小尺度衰落和大尺度衰落的结合。g表示瑞利衰落,且满足分布CN(0,1)。因此,发送方、D2D和接收方之间的信道增益为:
(3)

(4)

(5)

(6)

(7)
为了提升系统的保密性能,以最大化接收方的保密容量为目标,对系统的传输功率和UAV的轨迹进行优化,且满足信息因果约束、UAV轨迹约束、系统功率约束和地面D2D对的最小信噪比要求。因此,该保密容量最大化问题可以描述为:
(8)
2 基于UAV的D2D保密通信系统频谱共享算法分析
为了求解上述基于UAV的D2D保密通信系统保密容量优化问题,提出了基于BCD法的交替优化方法,该方法分为2个步骤:① 用差分凸规划(Difference of Two Convex Functions,DC)求解固定轨迹下的功率优化问题。② 用连续凸优化方法求解给定功率下的轨迹优化问题。
2.1 给定轨迹下的功率优化
首先,研究给定UAV轨迹下的系统传输功率优化。当UAV轨迹确定时,式(8)可以改写为:
(9)
即使已知UAV的轨迹,各节点之间的信道增益也已经确定,但是由于系统节点之间存在相互干扰和信息因果约束,特别是节点间的相互干扰使目标函数和约束条件非凸,因此该问题还是很难求解。为了便于分析,引入松弛变量Rp[n],原优化问题可以表述为:

(10)

(11)
式中:ψ=pu[n]gu,u[n]+ps[n]gs,u[n],f1、g1、f2、g2、f3、g3是关于P[n]的凹函数。接下来,采用DC来求解问题。已知凹函数在其可行点处的上界是其一阶泰勒变换[15],因此:

(12)

(13)
(14)
(15)
由此,式(10)已经转化为一个凸问题,可以用现有的凸优化技术解决[13]。
2.2 给定功率下的轨迹优化
给定系统传输功率的情况下优化UAV的飞行轨迹,式(8)可以转化为:
(16)
类似地,引入松弛变量Rt[n],Dw[n],令γ1=Puβ0/σ2。式(16)可以重新表述为:
(17)
解决该问题的关键是其复杂的约束条件。特别地,约束C2可以转化为式(18),也就是说,当di[n]>0时,总存在一个对D2D对的保护区域。当UAV在这个区域时,UAV的传输功率一定会受到限制。因此问题的可行域是非凸的,且很难直接将其转化为凸问题。为此,将式(17)分2步解决:① 不考虑D2D对对UAV轨迹优化造成的影响,优化UAV的轨迹。② 通过上文固定轨迹下的功率优化算法再优化系统功率以满足D2D对的最低信噪比要求。
(18)

因此,当不考虑D2D对的影响时,UAV轨迹优化问题可以重新描述为:
(19)
由于不考虑D2D对的影响,UAV、接收方和窃听方的信噪比为:
(20)

(21)
式中:
(22)
由此得到了原非凸函数在第k次迭代处的下界。因此,原问题可以通过迭代解决下面的问题得到:
(23)
式(23)是一个凸问题,可以用凸优化技术求解,如内点法[16]。在得到UAV的轨迹优化结果后,为保证UAV和D2D对的共存,即还需要满足D2D对最低的信噪比要求。考虑到前文已经研究了给定轨迹下的功率优化问题。因此,还需要再通过给定轨迹下的功率优化算法优化系统功率以满足地面D2D对的最低信噪比要求。
2.3 基于UAV的D2D保密通信系统频谱共享算法设计
基于前面对单独轨迹优化和功率优化问题的分析,提出了一种基于BCD法的高效的频谱共享算法。该算法通过对单独轨迹规划和功率分配2个子问题依次求解,再交替迭代求出最优值。具体算法流程如算法1所示。

算法1 基于UAV的D2D保密通信系统频谱共享算法① 初始化UAV的飞行轨迹{x[n],y[n]}0,设置算法迭代次数k=0。② 重复上步。③ 对给定的UAV轨迹,通过解决式(15)得到功率优化结果{Ps[n],Pu[n],PD2Di[n]}k。④ 对给定的功率,求解优化式(23)得到UAV的飞行轨迹优化结果{x[n],y[n]}k。⑤ 更新k=k+1。⑥ 直到收敛或得到最大迭代次数。⑦ 通过功率优化算法再优化系统功率。⑧ 输出保密容量结果最大化结果,功率和UAV轨迹优化结果。
3 仿真分析
3.1 系统设置

3.2 仿真结果
图2展示了该算法在不同情况下得到的UAV轨迹。其中,星星表示D2D对的坐标。可以看出,在所有情况中,UAV都先飞向发送方,然后飞向接收方。这种行为促进了信道的变化,也就是说UAV通过先靠近发送方来接收尽可能多的信息,再靠近接收方来获得更好的信道状态,以便将信息传输给接收方。同时,在窃听方附近时,UAV会尽量远离窃听方来提高保密容量。

图2 UAV轨迹优化结果Fig.2 UAV trajectory optimization results
图3展示了在图2轨迹下的功率优化结果。可以看到,发送方的传输功率和发送方与UAV间的距离密切相关,这其实反映了二者间的信道状态变化,即当信道状态越好,发送方的传输功率就越高。同理,UAV和接收方的距离越近,二者之间的信道状态越好,UAV的传输功率也就越高。同时,地面设备对的功率在所有的方案中都保持很低来减少干扰,这也表现了功率和轨迹联合优化的重要性。

(a)方案①下的功率优化结果

(b)方案②下的功率优化结果

(c)方案③下的功率优化结果
图4展示了UAV在全双工和半双工模式下以及不同自干扰值下的性能表现。此外,还研究了UAV沿着起始位置直线飞行到降落位置的基准方法。可以看到,该算法优于基准方法,体现了UAV的轨迹对系统性能的关键作用。此外,尽管总的保密容量随着自干扰的增加而降低,但全双工模式仍然优于半双工模式。在方案②中,总的保密容量明显低于其他方案,这是因为UAV距离接收方更远,因此需要花费更多的时间在飞行上。

图4 UAV在不同工作模式的性能表现Fig.4 Performance of the UAV under different modes
图5展示了提出算法的能源效率性能。为了体现所提出算法在能源消耗上的优越性,还与流行的遗传算法和粒子群优化算法进行功率消耗比较。除了之前介绍的3种方案外,其他方案中UAV的起飞点和降落点都是随机设置的。在所有情况下,UAV先飞到发送方在飞往接收方。显然,本文提出的算法可以提高UAV、发送方和D2D对的能源效率。因此,所提出的算法在安全通信方面具有更好的能耗性能。

(a)发射方的功率消耗比较

(b)UAV的功率消耗比较
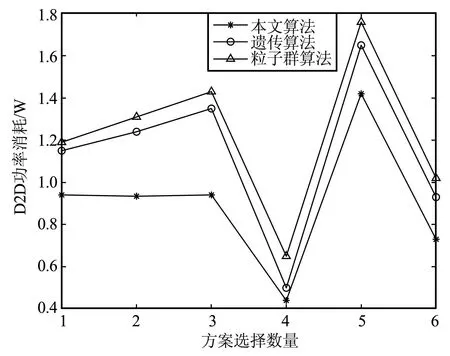
(c)D2D的功率消耗比较
4 结论
本文研究了基于UAV的D2D保密通信系统的频谱共享方法问题。为了实现接收方保密容量最大化的目标,提出了一种基于BCD法的交替优化算法,通过对UAV轨迹、发送方、UAV和D2D的传输功率交替优化,以实现最大化接收方保密容量的目标。从仿真结果可以看到,UAV总会先飞向信息发送方,再飞向接收方,其飞行轨迹和信道状态之间密切相关。此外,系统中的功率变化也和信道的变化相对应,UAV能够在频谱共享的同时满足地面D2D对的最低通信需求。和其他算法的比较中,提出的算法体现了功率消耗上的优越性。
猜你喜欢
中国石化(2022年5期)2022-06-10
信息安全与通信保密(2021年4期)2021-07-21
空间科学学报(2021年6期)2021-03-09
当代陕西(2021年1期)2021-02-01
考试与评价·高二版(2020年3期)2020-09-10
华人时刊(2019年15期)2019-11-26
测控技术(2018年7期)2018-12-09
北京电子科技学院学报(2016年1期)2016-06-15
中国卫生(2015年8期)2015-11-12
小说月刊(2014年2期)2014-04-18
