一种基于根管预备的绳驱机器人设计与分析
2024-03-06 05:32陈国良欧阳健
自动化与仪表 2024年2期
陈国良,欧阳健
(武汉理工大学 机电工程学院,武汉 430070)
近些年来随着我国经济快速增长,我国的口腔医疗条件以及牙医数量有一定上升[1]。但由于我国人口基数庞大,且各地区发展不均匀、不平衡的原因,我国人均口腔医疗条件仍然十分严峻。从第四次全国口腔健康流行病学调查资料来看,我国口腔医生总人数与我国总人口的比例为1∶7768,低于WHO提出的1∶5000 的标准,更低于一些发达地区和国家的1∶2000 的比例[2]。不仅我国口腔医生人数紧缺,相关口腔医疗设备器械市场也长期被国外公司垄断[3],所以振兴民族口腔医疗设备刻不容缓。
牙髓炎是一种十分常见的口腔疾病,而根管治疗是应对牙髓炎、根尖周炎最有效的治疗方式,根管预备是根管治疗手术中的一个十分重要且重复费时的程序。故在此设计利用一种全新构型的机器人去完成该动作,在我国当前口腔医疗大背景下研究根管预备机器人是相当有价值的。本文将从以下4 个方面进行论述:第1 部分是对该机器人的整体结构进行介绍;第2 部分是基于该机器人的结构对其进行电机转动与关节转动分析;第3 部分是对各连杆间绳索拉缩补偿进行分析;第4 部分是进行样机的制作以及运动可行性的验证。该设计目前还处于实验样机验证阶段。
1 机器人的整体构型设计
1.1 动力输出的构型设计
该设计中动力的输出由8 个控制电机实现,其中包含1 个步进电机推杆以及7 个步进电机,机器人设计的整体构造如图1 所示。
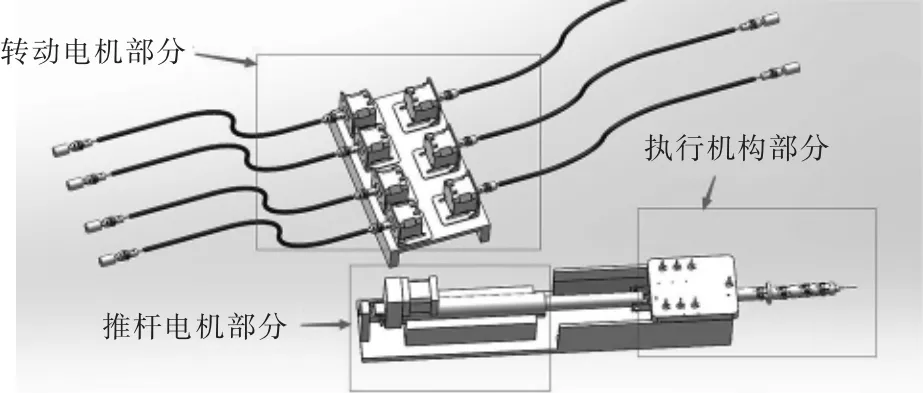
图1 机器人整体板块划分Fig.1 Overall plate division of robot
该机器人一共由3 部分组成:第1 部分是推杆电机部分,其主要实现执行机构的直线运动;第2部分是转动电机部分,其主要实现执行机构各关节的转动;第3 部分是执行机构,其由多关节组成,通过各关节之间的转动配合,以实现末端根管锉的位姿要求。
在手术执行之后,进入到患者口腔中的手术器械都需要经过120℃的高温水蒸气消毒30 min,这个过程对于电机而言是毁灭性的。若电机按传统的装配方式,则在手术执行后需进行繁琐的拆卸工作,基于这个问题,本设计中采用软轴与万用轴接头搭配实现电机转动的输出,该设计的最大优点在于电机的动力输出接应点可以在软轴的长度范围内随意变换位置,具备很好的便利性。
1.2 执行机构的构型设计
该机器人构型其动力传递机制为转动接应轴带动绳索滚筒,绳索一端绕制在滚筒上,另一端则与转动关节相连。转动关节之间以十字轴万向节进行连接。且一个十字轴万向节有2 个旋转自由度,可实现水平与竖直两个方向的旋转运动。故一个连杆由2 个电机进行控制。而进入口腔的部分有3 个连杆,口腔止位点前的十字轴万向节不进入口腔也无电机驱动,其主要目的是使得人体口腔与整体机构之间有一定柔性。
2 电机转动与关节转动分析
2.1 电机驱动可行性分析
该设计中1 个电机带动1 个绳索滚筒,而1 个滚筒上绕制2 根绳索,2 根绳索呈相反方向进行绕制,进而电机在转动时一根绳索收缩另外一根绳索则拉伸同样长度。一个滚筒上的2 根绳索用于驱动同一个转动关节的相同方位的旋转[4]。如图2 所示,连杆的水平方位的旋转拉力转矩与竖直方位转矩是相互垂直的,故水平方位的旋转电机带动关节旋转时,其力矩与竖直方位旋转电机的保持力矩不会相互干涉。
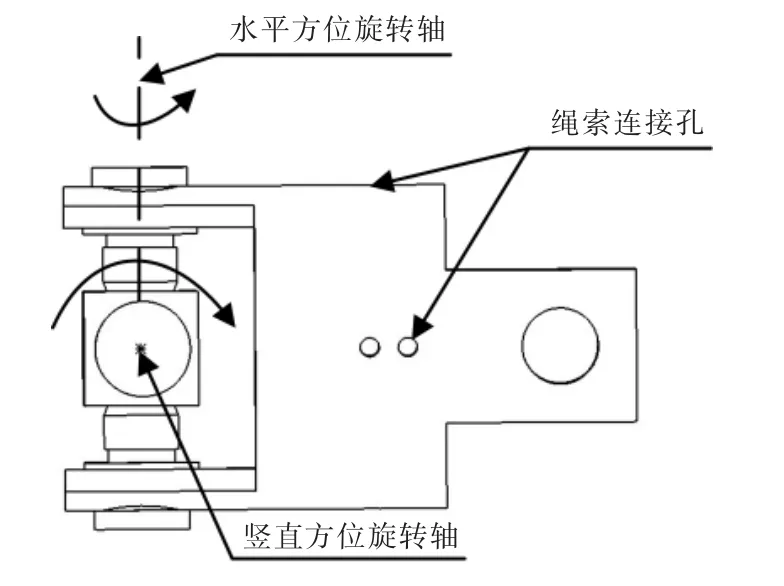
图2 十字轴万向节与连杆关节旋转示意图Fig.2 Schematic diagram of the rotation of the universal joint of the cross shaft and the connecting rod joint
2.2 绳索长度变化与关节转动角度分析
滚筒在转动时带动绳索进行伸缩,绳索伸缩变换则对应连杆的转动角度的变化。连接连杆的绳索分为2 个部分,第1 部分是连杆转动过程中长度固定不变的部分,如图3 所示L1长度。第2 部分是连杆在转动过程中绳索导向孔在绳索拉伸方向的距离变化,如图3 所示的L 长度。
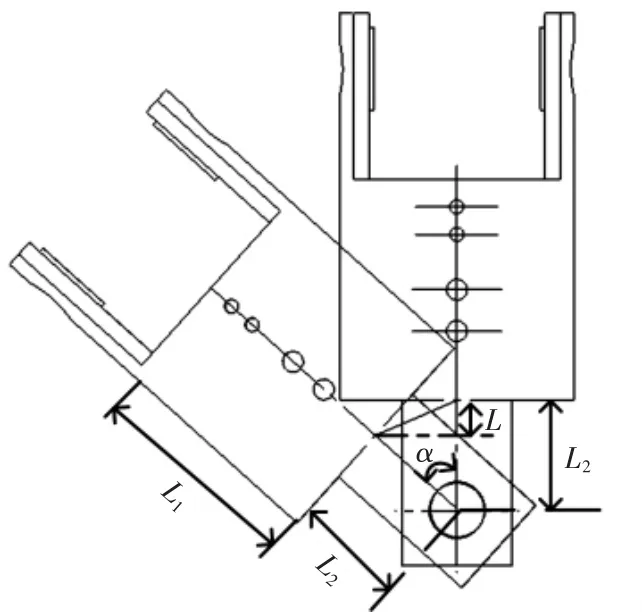
图3 连杆转动绳索长度变化示意图Fig.3 Schematic diagram of the change of rope length when connecting rod rotates
绳索长度变化L 与连杆转动角度α 的关系表达式如式(1)所示:
本设计中绕制绳索滚筒部分的直径为12 mm,即电机转动1 圈,绳索伸缩变化12 mm。故电机转动角度β 与绳索拉伸距离L 之间的关系如式(2)所示:
进而可得到电机转动角度β 与连杆转动角度α的关系表达式,如(3)所示:
式中:第1 连杆L2长度为8 mm;第2 连杆L2长度为6 mm;第3 连杆L2长度为8 mm。
3 各连杆间绳索拉缩补偿
3.1 末端执行机构关节构造
末端执行机构的各关节间采用十字轴万向节相连,万向节中心体的中间带有根管锉软轴通孔,根管锉旋转软轴通过各关节中心体通孔后连接根管锉接应轴,以带动末端根管锉的旋转。各连杆中有对应的软轴导向孔,软轴除带动末端根管锉的转动外,还为末端执行机构整体提供一定刚度。
3.2 根管锉旋转软轴变形分析
在传统刚性机器人分析中,其末端自由度的转动不影响根部关节的位姿。但对于该根管预备机器人,在最末端关节转动时,在根管锉旋转轴的接触作用下,其末端执行机构的根部关节也会产生一定的转动,对于其末端关节位姿会产生较大误差。故在此对根管锉旋转软轴受力变形进行有限元分析,探求其不同位置形变幅度的关系,从而为其后续精确控制提供数据支撑[5]。
本设计中采用的根管锉旋转软轴是直径为1 mm的304 不锈钢材料,其截面为1×7 型结构。在软轴建模时,以第一旋转关节的十字轴中心体至根管锉接应轴的距离作为建模软轴的长度。该软轴一共由7 股钢丝扭转而成,在建模时设置每根小钢丝为0.33 mm 的圆柱体。为便于对软轴进行有限元边界条件的添加,将软轴与十字轴中心体及各连杆接触位置切割为不同部分,如图4 所示。

图4 根管锉旋转软轴示意图Fig.4 Schematic diagram of rotating flexible shaft of pipe file
图4 中,L-1-1 表示第1 连杆旋转关节的十字轴中心体与软轴接触的长度部分,L-1-2 则表示第1 连杆的软轴导向孔与软轴接触的长度部分,L-2-1 与L-2-2 则分别表示软轴与第2 连杆十字轴中心体和软轴导向孔的接触长度,同理L-3-1 与L-3-2 分别表示软轴与第3 连杆十字轴中心体和软轴导向孔的接触长度。
添加其边界条件时,将图4 的L-1-1 部分进行固定。并在此基础上,当第3 连杆分别转动30°、45°、60°以及90°时,通过计算可以得到L-3-2 部分软轴的偏移距离。通过有限元分析探求L-3-2 部分在不同规定位移下,L-3-1 部分的平均变形位移大小。同理第2 连杆也是如此。
如表1 与表2 所示,分别表示L-3-2 与L-2-2部分在规定变形位移下的有限元分析结果。
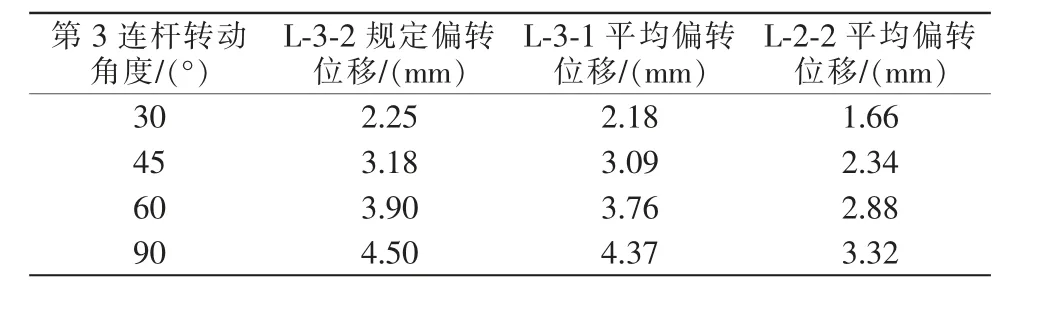
表1 根管锉旋转软轴L-3-2 部分规定位移有限元分析结果Tab.1 Finite element analysis results of the specified displacement of L-3-2 part of the rotating flexible shaft of the pipe file
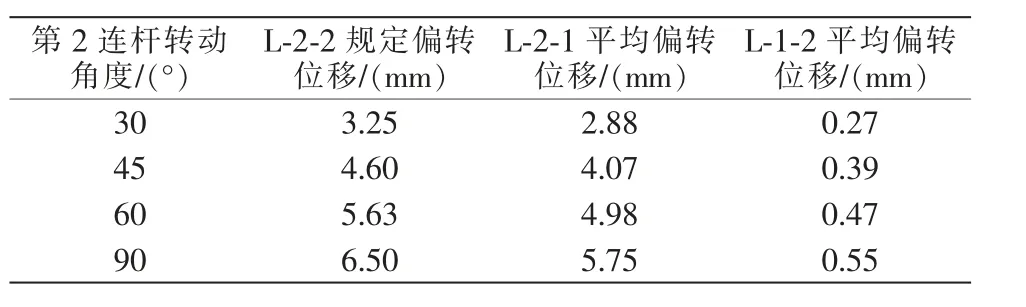
表2 根管锉旋转软轴L-2-2 部分规定位移有限元分析结果Tab.2 Finite element analysis results of the specified displacement of L-2-2 part of the rotating flexible shaft of the pipe file
3.3 关节间绳索拉伸补偿分析与牛顿非线性插值拟合
对于传统刚性机械臂,其运动学分析与精确控制是基于末端关节与上一关节运动的非耦合性[6-7]。但该设计中的根管预备机器人的执行机构含有根管软轴,当绳索带动某一连杆进行转动时,贯穿整个末端执行机构的根管软轴也会进行相应的偏转。为了剔除根管软轴对前端关节的影响,在此利用上一连杆的反向偏转去进行运动补偿,从而提高其控制精度。
当第3 连杆作为主动杆件进行转动时,根管软轴的偏转则带动第1 与第2 连杆进行一定被动偏转。其中图4 的L-3-1 部分的偏转位移对第2 连杆产生的偏转角度α31满足式(4):
式中:L31表示L-3-1 平均偏转位移;L4表示旋转轴线之间的距离。而L-2-2 部分的偏转位移对第2 连杆产生的偏转角度α22满足式(5):
式中:L22表示L-2-2 平均偏转位移,其计算结果如表3 所示。
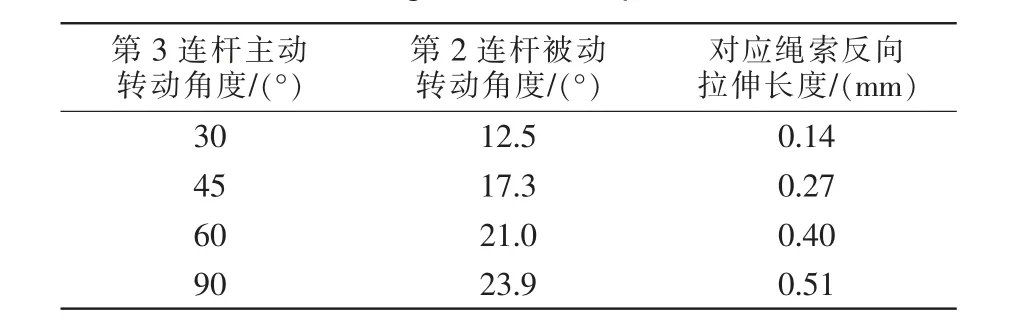
表3 第2 连杆被动转动角度与绳索反向拉伸长度关系Tab.3 Relation between the passive rotation angle of the second connecting rod and the reverse stretching length of the rope
上述有限元分析只对连杆的4 个不同转动角度进行分析,但在实际运动过程中,其转动角度是连续的,故有无穷多个转动角度。在此基于表格3的数据,利用牛顿插值法去拟合第3 连杆主动转动角度与第2 连杆被动转动角度之间的非线性关系,其中以第3 主动转动角度作为自变量xi,第2 连杆被动转动角度作为因变量yi,可求得其均差如表4 所示。
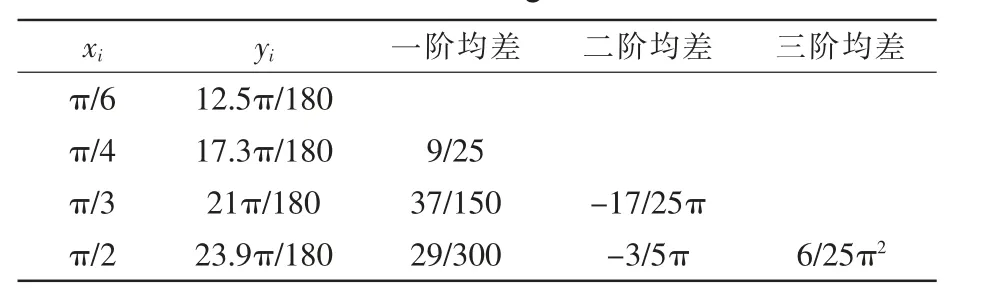
表4 第3 连杆转动时拟合函数均差Tab.4 Uniform difference of fitting function when the third connecting rod rotates
由表格4 进而可得其三次牛顿插值多项式如式(6)所示:
4 样机制作与实验
机器人一共由8 个驱动元件组成,其中1 个为步进推杆,另外7 个为步进转动电机。在该7 个步进转动电机中,有1 个电机为驱动根管锉旋转软轴的电机,则另外6 个步进转动电机两两配对,分别驱动3 个末端转动连杆。制造的样机模型如图5 所示,在该设计中采用ECI2828 运动控制卡作为下位机,以个人PC 机作为上位机,利用Ethernet 网口将PC 机与运动控制卡进行连接。

图5 样机模型Fig.5 Prototype model
末端执行机构的各关节转动电机采用42BYGH34型号步进电机,其步距角为1.8°。电机的转动通过软轴连接到绳索滚筒上,滚筒的转动带动绳索从而实现末端各连杆的转动,绕制绳索处滚筒直径为12 mm。将步进驱动器设置为2 细分,也即电机转动一周需400 个脉冲。此时上位机发出一个脉冲电机转动0.9°,对应绳索拉缩0.03 mm。如图6 所示,当第3 连杆转动时第2 连杆进行反向拉伸,从而实现运动位移补偿时的该机器人运动姿态。从样机实验结果可以知道,该方案的根管预备机器人可以基本实现其动作要求,并且当最末端连杆转动时,利用反向运动补偿可以实现其连杆运动的相对独立性。
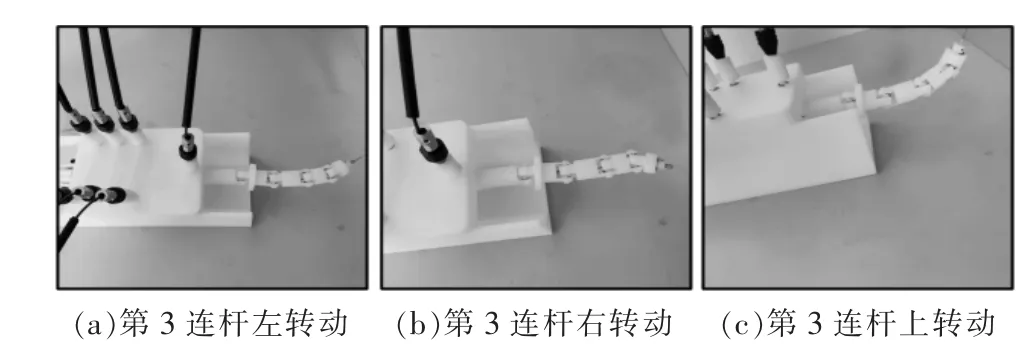
图6 第3 连杆转动运动补偿后姿态Fig.6 Posture of third connecting rod after rotational motion compensation
5 结语
根管预备机器人方案可以实现末端执行机构与驱动元器件的远距离布置,并通过软轴可以实现末端执行机构与驱动元器件的快速拆卸分离。通过绳驱的形式实现末端执行机构的较小尺寸,并可实现其基本动作要求。并且通过连杆间绳索反向拉伸补偿可以在一定程度上实现连杆间运动解耦。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
散文诗世界(2022年1期)2022-01-13
装备制造技术(2020年2期)2020-12-14
孩子(2019年7期)2019-07-29
当代陕西(2019年10期)2019-06-03
汽车实用技术(2017年16期)2017-09-21
机械工程师(2015年10期)2015-02-02
导航定位与授时(2014年2期)2014-04-27
吉林地质(2014年4期)2014-03-11