两轴径向独立轮副轨道车辆动力学性能
2024-03-07 11:48王文静邹晓宇王斌杰刘志明
铁道学报 2024年2期
杨 超,王文静,邹晓宇,王斌杰,李 强,刘志明
(1.北京交通大学 机械与电子控制工程学院,北京 100044;2.中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081)
独立车轮的导向问题是一个世界性难题[1-2]。独立轮对在传统固定轮对的基础上取消了中间车轴,使左右车轮能够独立旋转。这直接导致独立轮对的纵向蠕滑力消失,蛇行运动现象也随之消失,稳定性提高。然而,独立轮对在轨道上的导向能力较差,容易产生偏磨和爬轨脱轨现象[3]。这些缺点很大程度上限制了独立车轮的推广和应用。尽管如此,独立车轮技术是实现高速列车转向架变轨距功能的主要途径之一[4-5]。如果能在上述问题上取得突破,将从根本上改变独立车轮走行系统的运行性能。
文献[1-2]提出一种迫导向的独立轮对耦合转向架,主要用于铰接式列车,研究刚度对稳定性和曲线通过性能的影响,给出了最优耦合刚度。文献[6]提出一种单轴独立车轮走行部EEF,利用四连杆机构约束左右轮的摇头运动,调节径向车轮位置,有利于减小车轮的磨耗。文献[7]采用试验和动力学仿真方法研究差速器轮对和刚性轮对的曲线通过性能,发现差速器轮对在小半径曲线上具有较好的安全性;对比分析了差速器轮对、刚性轮对和独立轮对的导向性能,发现差速器轮对在小半径曲线具有较好的导向性能和磨耗性能,但在中等曲线上性能较差;差速器轮对通过引入刚度和阻尼使左右车轮重新耦合,属于横向耦合方式。文献[8-10]基于速差的主动控制方法用来改善独立车轮走行部的导向性能。文献[11-12]提出反踏面导向方法,利用样机试验证明该方法具有良好的导向性能。目前世界上最成熟的商用变轨距列车是西班牙Talgo公司的独立车轮高速列车[13]。文献[14]指出,弹性耦合轮对能够改善转向架的曲线通过性能。
上述研究有力推动了独立车轮技术的发展,而对于独立车轮系统导向问题的研究仍然处于探索中。本文提出后倾角导向方法,使两轴径向独立轮副轨道车辆(以下简称独立轮副车辆)获得自导向能力,改善独立车轮走行系统的固有特性。
1 独立轮副车辆的自导向原理
1.1 车辆导向原理
众所周知,自行车的前叉是向后倾斜的,空车在刚开始推行时依然能够稳定行走一段距离。自行车前叉后倾对自行车的导向性能和稳定性有一定的作用[15]。小型汽车前部的麦弗逊悬架主销一般是空间倾斜的,主销上端明显内倾,有利于车辆借助重力回正。主销上端也向车辆后方倾斜,有利于车辆借助横向力导向[16]。自行车前叉和麦弗逊悬架的主销都有后倾角,因此本文在独立车轮车辆悬挂系统中引入后倾角,用于改善其导向性能。
本文的主要创新点是针对独立车轮系统提出后倾角导向方法。常规的独立车轮转向架由于左右车轮解耦而失去纵向蠕滑力和摇头力矩,但横向蠕滑力和重力依然存在。如图1所示,单轴独立轮副是一种特殊的独立车轮走行系统,轴桥、两个独立车轮部件和横向杆构成四连杆机构,其结构与单轴独立车轮走行部EEF相似,主要不同点是独立轮副的连杆机构中引入了后倾角。四连杆机构耦合了左右独立车轮的摇头自由度,车轮的点头旋转仍然是完全独立的。当独立车轮的摇头转向轴线竖直时,轮轨横向力通常作用在穿过轴心的竖线上,产生的摇头力矩极小。然而当车轮摇头转向轴的上端向车辆运动反方向转动角度β到红色中心线位置时,踏面接触点到红线的距离形成一个力臂。β称为后倾角,正值表示后倾,负值表示前倾。由图2(b)可知轮轨横向力与后倾角产生的力臂共同形成摇头力矩,使独立车轮自动转向。

图1 独立轮副的导向原理

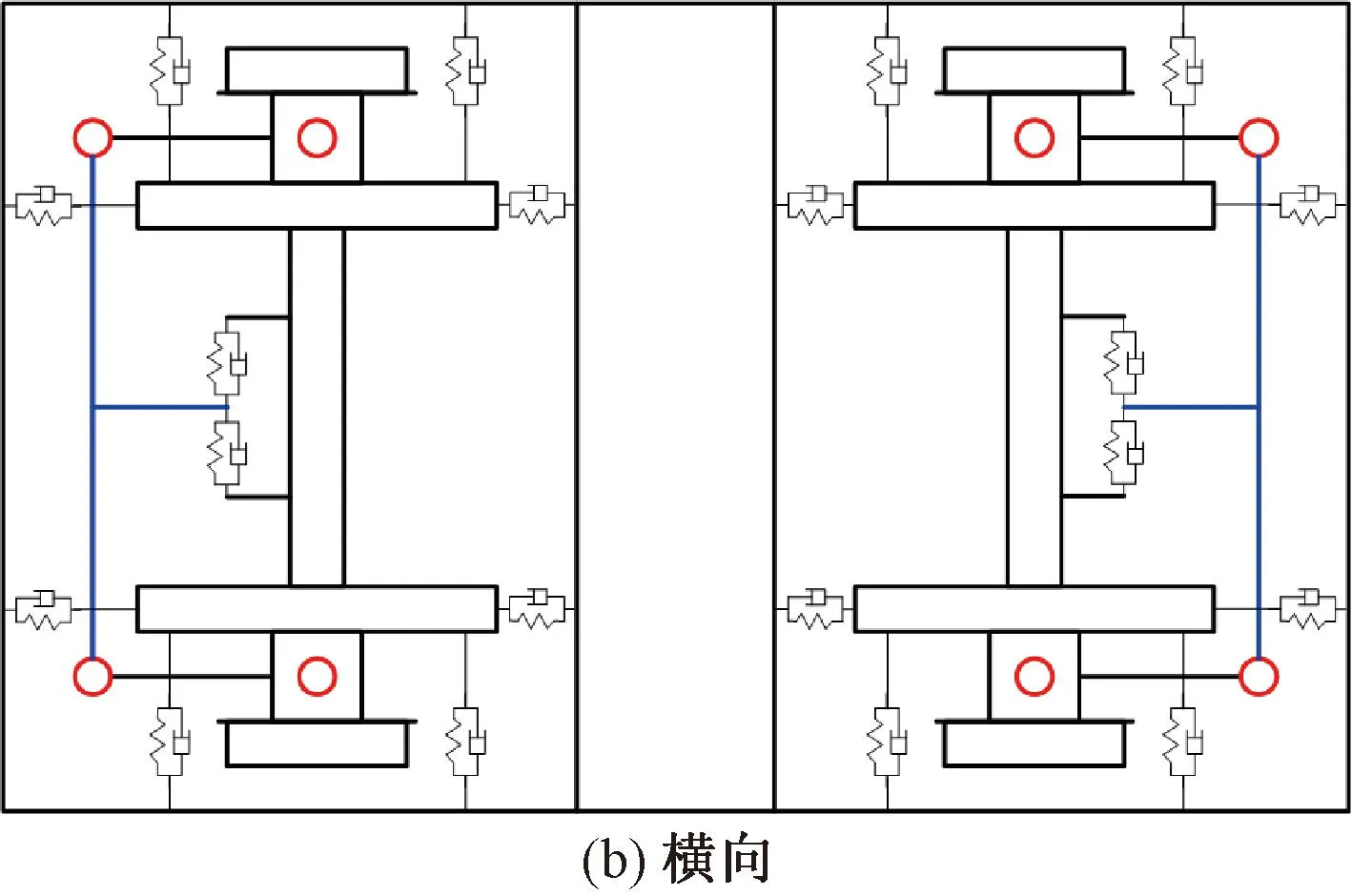
图2 独立轮副车辆的垂向、横向动力学模型
根据文献[17-18],左右独立车轮的横向蠕滑力Fyl、Fyr可以表示为
Fyl=Fyr=f22(ψw-vy/V)
(1)
式中: f22为横向蠕滑系数;ψw为独立车轮的摇头角;vy、V分别为车轮横移速度、参考速度。重力的横向分量为
Pl=Ql(δ0-γy)
(2)
Pr=Qr(δ0+γy)
(3)
式中:Ql、Qr分别为左、右轮的垂向载荷;δ0为初始接触角;γ为接触角变化系数;y为车轮横向位移。左右独立车轮的横向轮轨力可以表示为
Fl=Fyl+Pl
(4)
Fr=Fyr-Pr
(5)
根据横向轮轨力和后倾角,可以得出钢轨作用于独立轮副的摇头力矩为

(6)

(7)
式中:r0为车轮的滚动圆半径。
1.2 两轴径向独立轮副车辆
两轴径向独立轮副车辆可以看成具有4个独立车轮的转向架。前后独立轮副与构架直接通过一系悬挂系统连接。前后轮副之间以及轮副与构架之间没有连杆机构,属于自导向方式。车辆的前后独立轮副中心对称,后独立轮副的转向轴后倾[19]。根据对称性以及式(6)、式(7),当外轨接触车辆外侧轮缘时,前后独立轮副的摇头力矩是相反的,两者向不同方向旋转。前轮副向曲线内侧转向,后轮副向曲线外侧转向。通过前后独立轮副的自导向作用使独立车轮趋于径向位置。
2 车辆动力学模型
为定量研究独立轮副车辆的自导向性能,建立两轴独立轮副车辆的非线性动力学模型,如图2所示。该车辆动力学模型有24个自由度,主要由构架、轴桥、轴箱、独立车轮和横向连杆等13个刚体组成,刚体之间通过弹簧阻尼元件连接。图2(b)是后倾角为0的状态,其中红色圆圈代表转动铰。该动力学模型的非线性因素主要体现在非线性轮轨接触方面,轮轨法向力采用非线性弹性赫兹接触理论,非线性的轮轨切向力采用基于Kalker理论的Fastsim算法进行求解[17]。
车辆总质量6 100kg,其中轴桥质量800kg,车轮轴箱组件600kg。轴桥侧滚点头摇头转动惯量分别为400、100、400kg·m2;车轮侧滚点头摇头转动惯量分别为25、50、25kg·m2。轴距2m,车轮滚动圆半径0.46m,一系悬挂的x、y、z三向刚度分别为10 000、500、100N/mm,轴桥与横向连杆之间的横向刚度为10 000N/mm。模型采用标准轨距和磨耗型踏面。
3 直线导向性能
根据上述动力学模型及方程,采用动力学数值模拟分析两轴独立轮副车辆的导向性能。默认输出为外侧钢轨上的左前轮动态响应。
3.1 横向阶跃复位
在理想平直轨道上,初始速度为144km/h的车辆整体偏置于右侧钢轨5mm,分析车辆系统的阶跃响应,观察车辆能否回到轨道中央。
后倾角对车辆的阶跃响应有明显影响,如图3所示。由图3可见,当后倾角为0、0.05rad时,独立轮副车辆偏在轨道一侧的某个位置平稳运行,左侧车轮摇头角为接近0的定值。当后倾角增大到0.1rad时,车轮出现幅值约为5mm的横向等幅振荡,同时车轮伴以幅值为0.002 3rad的摇头振动,横移运动和摇头运动耦合成独立车轮车辆的独特蛇行运动现象。文献[1]将这种独特的蛇行运动称为类蛇行运动。当后倾角进一步增大到0.2rad时,车辆仍然存在类蛇行运动,横向振动幅值仍然为5mm,摇头振动幅值约为0.003 3rad。后倾角0.1、0.2rad对应的类蛇行运动周期分别为4.0、2.4s。类蛇行运动具有动态对中和避免偏磨的作用,只要采取有效衰减振动的措施就能够使车辆复位到轨道中央。


图3 横向偏置条件下车轮横向位移、摇头角
常规的独立车轮走行系统不会产生蛇行运动。然而,本文的两轴独立轮副车辆却出现了类蛇行运动,这表明它与常规独立车轮转向架存在较大区别。传统固定轮对的两侧纵向蠕滑力相对于轮对中心形成摇头力矩,使轮对的摇头运动和横移运动耦合成一个闭环运动。然而,常规独立轮对消除了纵向蠕滑力,打破了这个闭环关系,两种运动相互解耦。两轴独立轮副车辆利用后倾角形成力臂,横向轮轨力和力臂形成使独立车轮转向的摇头力矩,该力矩使独立车轮的摇头运动和横移运动重新耦合,产生类蛇行运动。类蛇行运动可以促使独立车轮走行系统克服偏磨和脱轨等缺点,但同时也带来运动稳定性问题。
3.2 直线激扰复位
车辆进入直线轨道时仅有初始横向位移激扰,本节同步引入横移和摇头角两个初始条件。在直线轨道上设置一段横向轨道不平顺,两轴独立轮副车辆以144km/h速度通过不平顺线路后进入理想直线轨道,通过车轮的横向位移和摇头角分析车辆在直线轨道上的自动复位性能。
横向不规则激扰条件下,两轴独立轮副车辆在直线轨道上能够自动复位,如图4所示。由图4可见:无后倾角情况下车轮的横向位移在轨道一侧非常缓慢地变化,车轮摇头角几乎为0。然而当后倾角为0.05、0.1rad时,独立车轮出现类蛇行运动并逐渐收敛到平衡位置,角度越大衰减越慢。在这种情况下运动系统是稳定的,临界速度不低于144km/h。当后倾角等于0.2rad时,车轮横移和摇头都出现了等幅振荡,此时类蛇行运动处于临界状态,既不衰减也不发散,这在李雅普诺夫意义上是不稳定的,临界速度低于144km/h。随着后倾角增大,独立车轮的收敛速率越来越慢,临界速度逐渐降低,车辆系统的稳定性逐渐变差。


图4 轨道不平顺条件下车轮横向位移、摇头角
4 曲线导向性能
车辆以54km/h速度通过曲线轨道,线路条件为50m直线—50m缓和曲线—100m圆曲线—50m缓和曲线—300m直线,圆曲线半径200m,外轨无超高[20]。通过车轮横移量、车轮冲角和横向轮轨力分析车辆通过曲线的导向性能。
两轴独立轮副车辆的外轨前后车轮横向位移响应如图5所示。由图5可见,进入曲线时,后倾角对车轮横移量影响较小。左前轮在缓和曲线和圆曲线上的最大横移量达到约10mm,此时轮缘贴靠钢轨。左后轮在缓和曲线达到最大8mm横向位移后迅速下降,在圆曲线上的横移量稳定在1mm左右。驶出曲线时,后倾角对车轮横移量有较大影响。在缓和曲线上左前轮横向位移缓慢下降到约8.4mm,进入直线时车轮横移量区别明显。无后倾角的左前轮在重力作用下缓慢向平衡位置移动。而后倾角为0.087 3、0.174 5、0.261 8rad时,左前轮出现低频衰减振荡的类蛇行运动,能够动态回正到轨道中央。从圆曲线进入缓和曲线时左后轮横移量迅速上升到约8.3mm,进入直线时左后轮与左前轮出现相同的类蛇行运动现象。


图5 左前后轮的横向位移
外轨前后轮的冲角变化如图6所示。由图6可见,左前轮进入缓和曲线出现大冲角,冲角逐渐增大到约0.009rad,在圆曲线上车轮冲角保持恒定,再进入缓和曲线时冲角逐渐减小到0。左前轮驶出缓和曲线时,后倾角对车轮冲角影响较大。无后倾角时冲角恒为0,有后倾角时车轮在直线轨道上左右摇头运动。左后轮进入缓和曲线先出现较大冲角,后其幅值迅速减小,在圆曲线上车轮冲角稳定在0.55mrad,驶出圆曲线时冲角逐渐恢复到0附近。再次进入直线时,后倾角使车轮冲角出现长波振荡,左后轮冲角振幅随后倾角增加而增大。


图6 左前后轮冲角
当后倾角为5°(0.087 3rad)时,4个独立车轮的横向轮轨力和横向蠕滑力变化如图7所示。由图7可见,右前轮受力指向曲线外侧,另外3个车轮受力方向与之相反。左前轮在圆曲线上贴靠外轨,横向轮轨力稳定在6.31kN,主要是轮缘法向力的横向分量。在圆曲线上,左后轮和右后轮的横向轮轨力分别为1.85、1.53kN,左后轮和右后轮的横向蠕滑力分别为1.65、1.67kN,后独立轮副的横向轮轨力主要成分为横向蠕滑力。同理,右前轮横向轮轨力的主要成分也是横向蠕滑力。
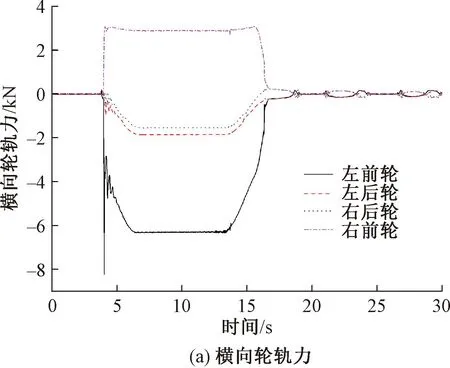

图7 后倾角5°独立车轮的横向轮轨力、蠕滑力
通过前后车轮的横移量、冲角和横向力可以发现,独立轮副车辆从曲线进入直线后能够动态对中,最终回到轨道中心线位置。然而,在曲线轨道上,左前导向轮的冲角较大,左后轮的冲角较小,前后车轮展开不足,没有很好地趋于径向位置。部分原因是曲线轨道未设置超高。横向轮轨力与后倾角力臂形成摇头力矩为车辆提供有限的导向功能。因此,带后倾角的独立轮副车辆在直线轨道上能够自动复位,在曲线上具有一定的导向能力。
5 结论
1) 针对独立车轮系统提出后倾角导向方法。横向轮轨力和后倾角的力臂形成摇头力矩,该力矩使独立车轮系统能够自导向。
2) 在直线轨道上,与后倾角相关的摇头力矩把独立车轮的横移运动和摇头运动重新耦合,使具有后倾角的独立轮副车辆出现类蛇行运动现象。类蛇行运动使车辆能够自动复位。随着后倾角增大,独立车轮横向位移的收敛速率越来越慢,车辆临界速度逐渐降低。
3) 在曲线轨道上,外轨前轮轮缘在曲线上贴靠钢轨并具有较大冲角。外轨前轮横向轮轨力是轮缘法向力的横向分力。另外3个独立车轮的横向轮轨力主要成分是横向蠕滑力。车辆驶出曲线时,后倾角能够使车辆动态复位。带后倾角的独立轮副车辆在曲线轨道上具有有限的导向能力。
猜你喜欢
计算机测量与控制(2023年8期)2023-08-30
铁道通信信号(2020年10期)2020-02-07
小读者(2019年24期)2020-01-19
中国工程机械学报(2019年4期)2019-08-06
铁道机车车辆(2019年3期)2019-07-29
振动工程学报(2019年2期)2019-05-13
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
铁道通信信号(2016年6期)2016-06-01
发明与创新·中学生(2016年7期)2016-05-14