基于耦合分析的热流系统协同设计
2024-03-07 08:14温宇钒李东海
控制理论与应用 2024年1期
温宇钒 ,何 婷 ,李东海
(1.暨南大学能源电力研究中心国际能源学院,广东 珠海 519070;2.清华大学能源与动力工程系,北京 100084)
1 引言
为减少二氧化碳排放,响应全球节能减排号召,中国政府在第七十五届联合国代表大会上提出“双碳目标”,力争在2030年前实现碳达峰,2060年前实现碳中和[1].综合能源系统作为一种先进的节能减排技术,是提高能源利用效率、降低碳排放的重要手段[2].综合能源系统涉及多种异质能源耦合互补,包含多种热流系统,如能源供给环节中的热电联产设备、能源交换环节中的换热器以及能源存储环节中的蓄热器.热流系统深度参与综合能源系统的能源供给、传输与储存.在多种能源之间相互耦合综合能源系统中,热流系统的设计显得尤为重要.
随着系统复杂性及其动态性能要求的提高,控制器设计也愈发引起重视.传统设计过程遵从先设计物理系统,基于物理系统设计控制器的原则进行设计[3].如在热流系统设计中,通常先假设其在稳态下运行,根据实际物理设计指标(如系统总质量)设计物理系统,然后再根据系统暂态指标(如超调量)的要求设计控制器.然而,这种设计方法忽略了物理系统和控制器之间的耦合关系,在设计物理系统时片面追求物理系统设计指标,导致后续控制器整定难、控制结果难以满足暂态指标[4–5].因此,引入协同设计方法,在设计物理系统时考虑暂态指标,避免因物理系统设计不合理而导致系统暂态性能不佳.
协同设计是一种设计物理系统时考虑控制器设计的方法,在风机设计[6]、汽车设计[7]、航空器件设计[8]等多个领域有广泛应用.常见的协同设计方法共有4种,其中仅嵌套设计方法和同步设计能保证所设计系统为最佳[9–10].嵌套设计方法将控制器设计嵌套在物理系统设计中,外部优化循环优化物理系统,内部优化循环针对外部循环的每个物理系统优化控制器.同步设计方法将物理系统设计和控制器设计整合成一个优化问题,同步优化设计出最佳系统.在采用同一优化算法的前提下,嵌套设计方法求解速度慢于同步设计方法[11].为解决这一问题,对于一些简单的系统,常以线性二次型调节器[12–13]为控制器,以减少嵌套设计方法中内部优化循环的运算量,从而加快整体的求解速度.在热流系统领域的应用上,Diangelakis等人[14]将系统当作黑箱,通过系统识别技术导出系统状态空间方程,最后使用多目标优化框架来设计物理系统和模型预测控制器.Nash和Jain[15]以熵产率表示系统效率,将熵产率和鲁棒性视为设计指标,采用嵌套设计方法设计热流系统.随后Nash和Jain[16]又提出一种基于模型保真度的分解分层控制的协同设计算法,将模型降阶分解,并通过引入中间优化程序来解决子问题之间的耦合问题,从而最大限度地提高集总参数控制模型的准确性.Burnak等人[17]在进行系统设计时不仅考虑物理对象和控制器的设计,还将调度任务一同加入设计指标,并推导出物理系统设计、控制器设计和调度过程中参数时的相互映射关系,以解决控制过程和调度过程中时间尺度不匹配的问题.
可以发现,上述研究在设计系统时,都是直接根据实际工程中待设计参数及其物理约束进行设计,未对物理系统与控制器间的耦合关系进行分析,这导致设计过程中参数个数多、取值范围大的问题.基于此,本文提出一种设计协同设计方法,构造基于时间序列模式距离的相关度函数以分析物理系统与控制器之间的耦合关系,并利用过程中产生的数据进一步缩小参数的范围,实现热流系统的高效合理设计.
2 问题描述
2.1 热流系统模型
根据质量守恒定律和能量守恒定律,建立热流系统的第一性原理模型.如图1所示,热流系统主要由存储罐、加热部件、散热部件组成,涉及热存储、加热、散热、热传输4个热力学过程.在泵的作用下,温度为Tt的工质以质量流量˙mc从存储罐流向加热部件.加热部件由外部热源˙Qa供热,其管壁温度为Tw,a.工质从管壁吸收热量,温度上升至Ta.在加热部件下游,工质以质量流量˙mE离开热流系统,不再参与后续循环.剩下的工质在泵的作用下流向散热部件.散热部件主要由壳体和管束组成,温度为Tc的冷却液以质量流量˙mr流经散热部件的管束外部,管束管壁温度维持在Tw,r.工质从管束内部流过,将热量经由管壁传递给冷却液,工质温度下降至Tr.最后,冷却后的工质回流到存储罐中,开始下一次循环.
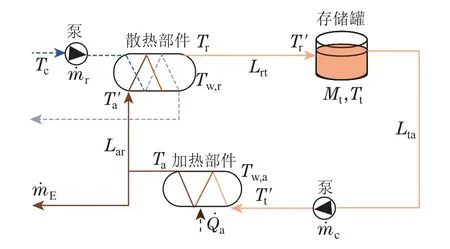
图1 热流系统原理图Fig.1 Schematic diagram of thermal-fluid system
整个过程中,因热传输过程的存在,工质的温度变化存在一定的延迟,其主要取决于不同部件之间的距离以及工质质量流量.本文以T′代表延迟温度,即T′=T(t-τab),延迟时间τab=ρAcLab/ ˙m,其中:ρ为工质密度;Ac为管道的横截面积;Lab为管道长度;˙m为工质的质量流量.
存储罐内工质质量因部分工质在加热部件下游脱离系统而发生变化.同时,存储罐内工质的温度与进出工质的温度和流量有关,即
系统的热量变化等于进出系统工质热量之差.因此,可得到加热部件和换热部件出口工质的温度和管壁温度为
其中: 下标t,a,r,w分别代表存储罐、加热部件、散热部件、换热部件管壁;cp为工质的比热容;cp,w为换热管管壁材料的比热容;cp,c为冷却液的比热容;Mt为存储在存储罐的工质总质量.管束的换热面积As=πLrefD,Lref为管束总长度;D为管束直径.热容C=AcLrefcpρ;Ac为管束的横截面积.管束管壁质量mw=0.25πρwLref(),Di,Do分别为管束内外直径.式(3)–(6)左项代表系统的热量变化率,右边第1项代表进入系统热量的变化率,右边第2项代表离开系统热量的变化率.冷却液带走热量c→w根据热效率–传热单元数法方法[18]得到
2.2 熵产率模型
熵是系统不能做功能量的总和,作为一种描述热力学特性的物理状态,可通过传质或传热过程在系统内传输.在真实系统中,熵可用来描述系统内部不可逆反应发生的情况.为进一步描述系统不可逆过程发生的激烈程度和熵的变化情况,引入熵产率gen,即
其中: 右边第1项代表传热过程引起的熵变;右边第2,3项代表传质过程引起的熵变;右边第4项代表不可逆过程引起的熵变.
热流系统中,系统熵产率变化主要由存储罐、加热部件以及散热部件中工质质量流量与温度变化引起,结合前文对热流系统模型的数学描述,推导出热流系统熵产率的数学模型为
2.3 热流系统协同设计问题描述
系统设计分为物理系统设计和控制器设计两部分.物理系统设计需要在满足物理约束的前提下,调整系统各部件参数,使对应设计指标达到最优.控制器设计则是基于所设计的物理系统,调整控制器参数,使系统的动态响应能力与抗扰能力最佳.在上述设计流程中,控制器设计基于物理系统,受限于物理系统.但这两个环节的设计目标不同,隶属于不同的优化过程,这使得系统设计成为一个复杂的问题.以本文研究的热流系统为例,其系统协同设计框架如图2所示.

图2 热流系统协同设计框架Fig.2 Co-design framework for thermal-fluid system
热流系统中,物理系统设计是指对系统各部件参数的选择,具体为罐体储存工质质量,管道长度Lta,Lar,Lrt,Lr,La.本文物理系统的设计目标是追求较低的稳态效率和较小的系统总质量,控制器的设计目标为加热部件管壁温度Tw,a和散热部件管壁温度Tw,r跟随设定值.系统采用两个PID(proportion integration differentiation)控制器,分别对工质质量流量˙mc和冷却液质量流量˙mr进行调节,因此,控制器设计参数为控制器的增益系数,即P1,I1,D1,N1,P2,I2,D2,N2.另外,在进行控制器设计时,需对系统暂态熵产率的上限进行限制,同时以最小化暂态熵产率为优化的目标之一.为量化控制器的控制效果,采用误差绝对值积分(integral of absolute error,IAE)指标衡量加热部件管壁温度Tw,a和散热部件管壁温度Tw,r的控制效果.热流系统各部件参数作为耦合量,将物理系统设计和控制器设计整合成系统协同设计问题.因此,系统协同设计的优化目标为物理系统设计目标和控制器设计目标的综合,即系统稳态熵产率、暂态熵产率、系统总质量和IAE之间的线性组合.
3 热流系统的协同设计
3.1 基于时间序列模式距离的相关度度量
时间序列分段线性表示是将时间序列表示成一段段相邻的直线.时间序列分段线性表示有3种状态: 上升、下降和不变,对应表示为M ∈{1,-1,0}.对时间序列进行差分,通过差分值符号判断状态,并映射到M,得到一组时间序列的分段线性表示,将其称为时间序列分段线性的状态向量.时间序列模式距离可以反映具有相同长度序列之间趋势的差异程度[19].时间序列S1,S2的模式距离定义为
其中:m1i和m2i为对应状态向量的第i个值;k为时间序列状态向量的长度.
显然,|m1i-m2i|取最小值0 时两时间序列分段的变化趋势相同,取最大值2 时两时间序列分段的变化趋势完全相反.因此,当DS1,S2远大于k时,两时间序列呈负相关,DS1,S2接近于0时,两时间序列呈正相关.构造相关度度量函数为
r越接近于1,两时间序列相关度越高;r越接近于0,两时间序列相关度越低.相较于其他方法,如灰色关联度分析法,在计算序列距离时,本文采用反映序列趋势动态变化相似性的模式距离而非几何距离,解决了其他方法不能辨别序列形状相似性的问题.
3.2 协同设计方法的改进
为应用基于时间序列模式距离的相关度度量方法,剔除低相关的物理系统参数,进一步缩小物理系统设计参数范围,本节提出了一种将嵌套设计方法和同步设计方法相结合的协同设计方法,如图3所示.
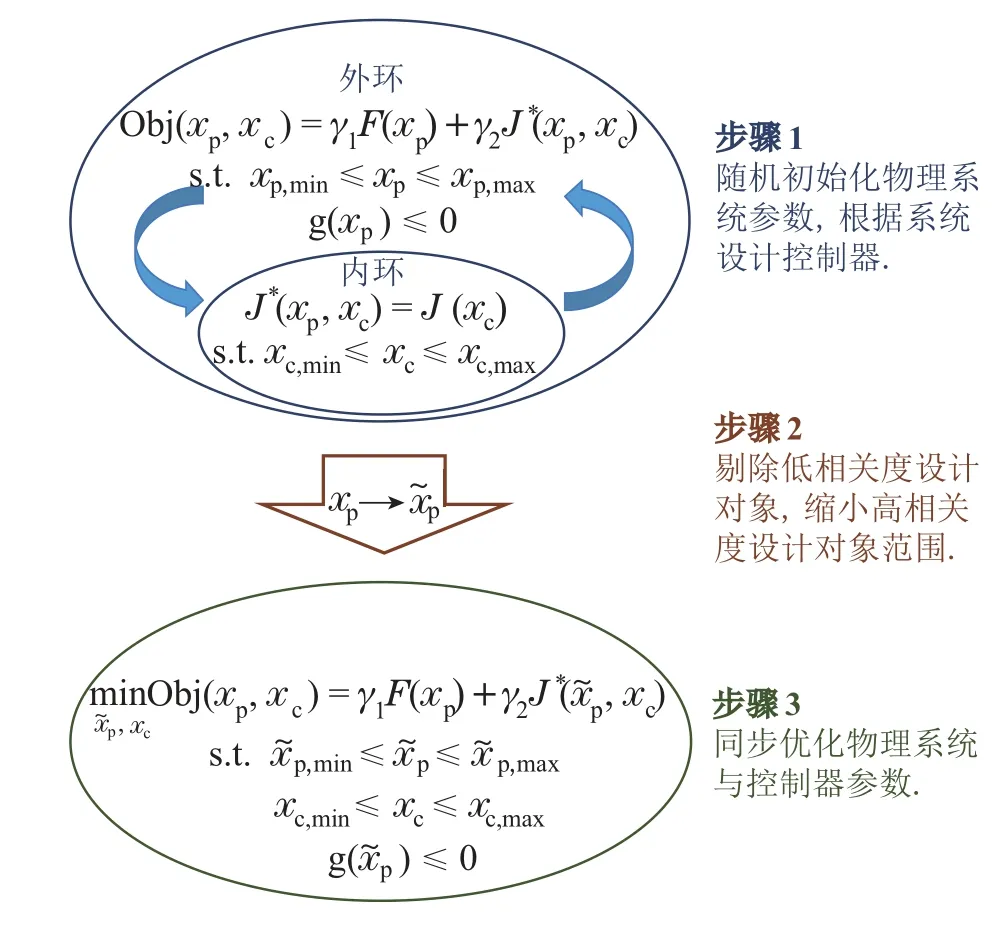
图3 协同设计流程Fig.3 Process of co-design
首先,采用嵌套方法生成待分析数据.不同的是,在内环求解时不以获得最优控制器为目的,为加快求解速度,仅求解一组使系统稳定的控制器参数.同样,外环求解物理系统的参数时,在其取值范围内随机选取.外环求解:
其中:γ1,γ2,γ3,γ4为各优化目标权重;x为待设计参数;下标p与c分别代表物理系统和控制器;上标e与t分别代表系统处于稳态和暂态.
然后,将生成的物理系统参数与控制误差数据按生成顺序构造成时间序列,进行差分与映射后得到时间序列的状态向量.利用相关度度量方法,计算物理系统参数与控制误差间的相关度.低相关度参数对控制器设计影响小,进行单独设计.高相关度参数根据不同取值对应的控制效果进行标注,将控制效果好的数据标为正常数据,其余为异常数据,根据标记结果对数据进行分析,从而缩小参数的选取范围.
最后,在简化且缩小范围的物理系统参数~xp的基础上,采用优化时间较短的同步设计方法求解出最佳物理系统参数和控制器参数,具体如下:
优化目标表达式内各优化目标权重将物理系统设计与控制器设计整合在一起.在约束条件中,参数空间从xp缩小至,寻优空间减小,间接加快了求解速度.相较于式(15)与式(16)所示的嵌套设计方法,同步设计方法只有一层优化循环,求解时所需迭代次数更少,求解速度更快.
4 仿真计算结果
4.1 热流系统设计实例
热流系统参数如表1所示,按照前文提出的协同设计方法设计系统,具体流程如图4所示.

表1 热流系统参数Table 1 Parameters of thermal-fluid system
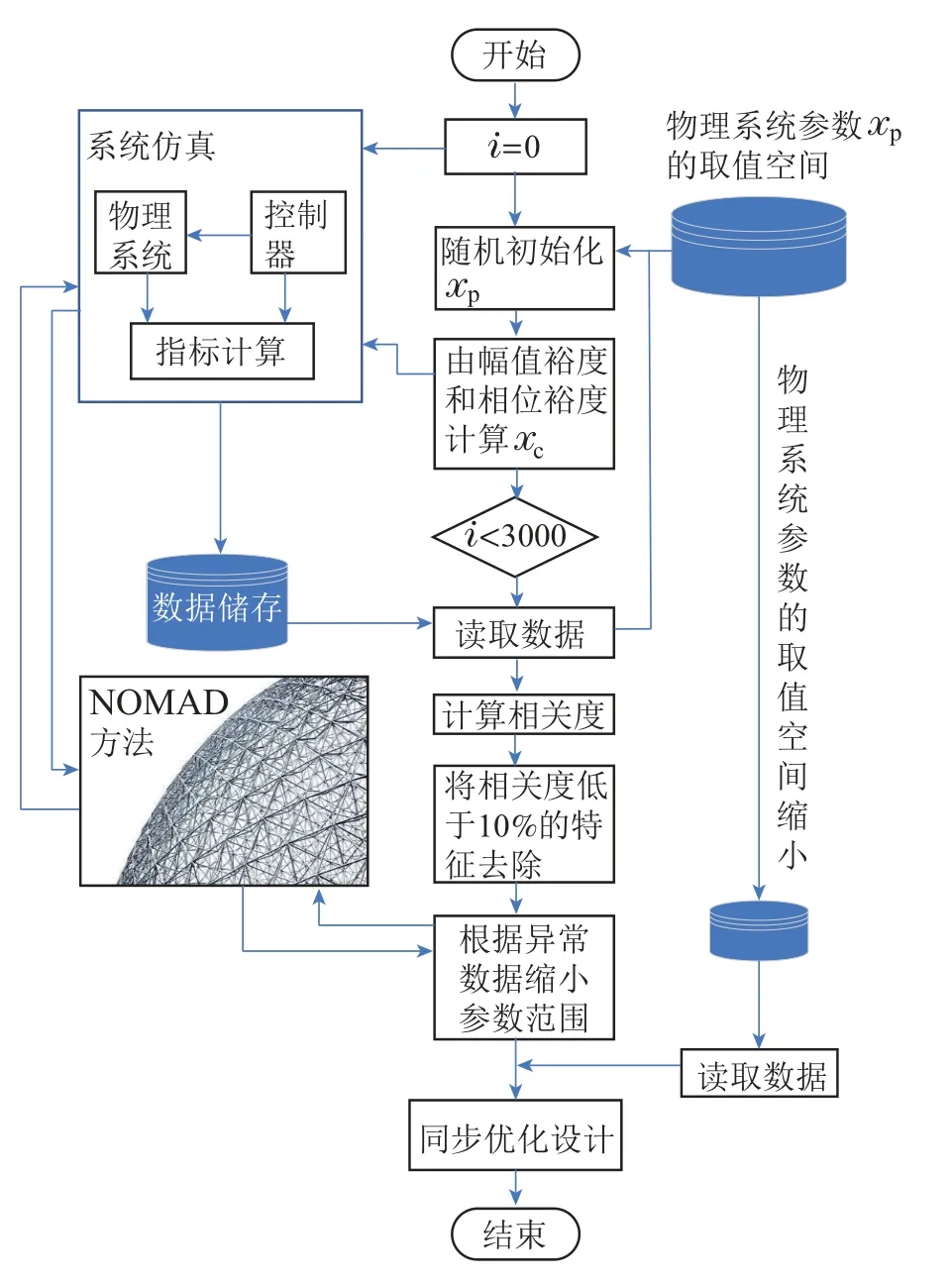
图4 热流系统设计流程Fig.4 Design process of thermal-fluid system
首先,使用嵌套设计方法得到物理系统参数与对应控制效果数据.随机选取物理系统参数,线性化物理系统后采用频域整定方法[20]设计控制器,得到3000组系统参数对应控制效果{IAEa,IAEr}数据.随后将嵌套设计方法得到数据按生成顺序构造时间序列,进行差分和映射操作得到其时间序列的状态向量,根据式(14)计算各物理系统的参数与控制误差的相关度,如表2所示.

表2 待设计参数与控制效果的相关度Table 2 Correlation between designed parameters and control effect
相关度高于10%的参数定义为高相关度参数,其余为低相关度参数.显然,只有{Lr,La}为高相关度参数.为验证低相关度参数对热流系统的影响,在原设计中最小化低相关度参数,将各低相关度参数设为最大值,进行仿真比较.
图5的仿真结果表明,低相关度参数的变化对控制效果基本没有影响.从热流系统角度分析,参数Lta,Lar,Lrt为系统各部件间的距离,仅会给系统响应带来延时,低相关度表明各部件距离对系统响应延时影响较小.参数为罐体储存工质的初始质量,影响系统惯性,低相关度说明罐体储存工质的初始质量对系统惯性影响不大.

图5 低相关度参数对控制效果影响Fig.5 Influence of low correlation parameters on control effect
为进一步缩小高相关度参数范围,对不同高相关度参数对应的控制误差进行分析.如图6所示,控制误差IAE在1000左右时(即log(IAE)在3附近),随着设计参数的缩小,IAE急剧增大,这说明此参数范围下控制系统已出现振荡发散的情况.因此,将Lr,La对应的IAE中小于1000的数据标记为正常数据,其余的标记为异常数据,如图7所示.

图6 高相关度参数对控制效果影响Fig.6 Influence of high correlation parameters on control effect
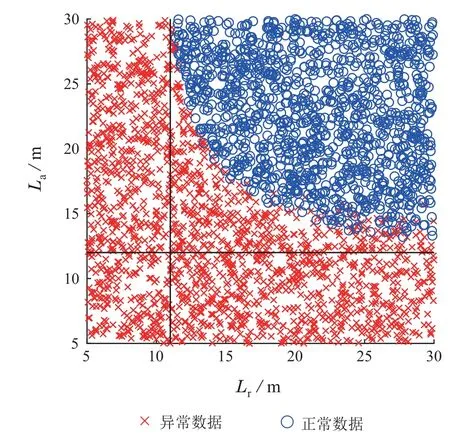
图7 数据分类Fig.7 Classification of data
从图7可知,正常数据和异常数据的分布都较为集中,有明显分界.因此,重新调整{Lr,La}取值范围,将下界由{5,5}上调至{11,12}.
经低相关度参数剔除和高相关度参数范围缩小,物理系统待设计参数由6个缩减至2个,参数个数减少66%,选取范围缩小26%.低相关度参数{Lta,Lar,Lrt,的取值对控制器的设计影响较小,根据物理系统设计指标直接设计,即系统稳态熵产率和系统总质量最小.随后,采用同步设计的方法,利用优化算法,同步调整物理系统和控制器参数{Lr,La,P1,I1,D1,N1,P2,I2,D2,N2},使目标函数到达最小值.本文选用NOMAD(nonlinear optimization with the mesh adaptive search)算法[21]进行求解,这是一种基于网格自适应直接搜索的算法,可以有效地探索设计空间,在优化问题中被广泛应用[22–23].
4.2 协同设计方法的分析与比较
本文热流系统的协同设计中,权重γ1,γ2为物理系统在设计中所占的权重,权重γ3,γ4表征控制器在设计中的重要程度.为简化计算,γ1和γ3取相同值,则可整合并成.为研究权重选择对系统设计的影响,本文采用3组不同权重对系统进行协同设计.根据系统响应,分析权重选择对系统协同设计的影响.设计过程中所采用的扰动如图8所示,由热源的阶跃扰动、冷却液温度的加入一阶惯性环节的阶跃扰动以及模拟工质泄漏的方波扰动组成.

图8 系统扰动Fig.8 System disturbance
表3为采用不同权重的协同设计方法以及顺序设计方法的物理系统参数、控制器参数、优化目标结果.比较协同设计2和协同设计3的结果可知,增大权重γ2可以减少系统总质量,但当权重γ2过大时,会使得控制效果不佳.比较协同设计1和协同设计3可知,增大权重γ4可以减少对应的IAE值,同时可以降低系统熵产率.

表3 不同协同设计方法的优化结果Table 3 Design results of different design methods
为进一步体现本文提出的协同设计方法与现有设计方法的区别,采用文献[15]中的顺序设计方法设计系统.顺序设计方法步骤为:先设计物理系统,使系统在最大扰动下稳定运行且总质量和稳态熵产率尽可能小,在此基础上设计控制器,使控制误差积分和暂态熵产率尽可能小.从表3中性能指标和图9 中控制响应曲线可以看出,顺序设计方法可以使系统总质量相对较小,但在控制器性能表现上相对不足.在多种扰动源作用下,即使采用不同权重系数,本文所提出的协同设计方法总体上具有更好的扰动抑制效果.在采用同一权重下,相比于顺序设计,协同设计使得加热管壁温度Tw,a波动范围由360.9∼366.5 K 减小至361.8∼365.1 K,对应的IAE减少29%.另外,从图10可知,协同设计使得系统的熵产率更低,在面对扰动时熵产率最大波动值由22.43 W/K减小至19.76 W/K.
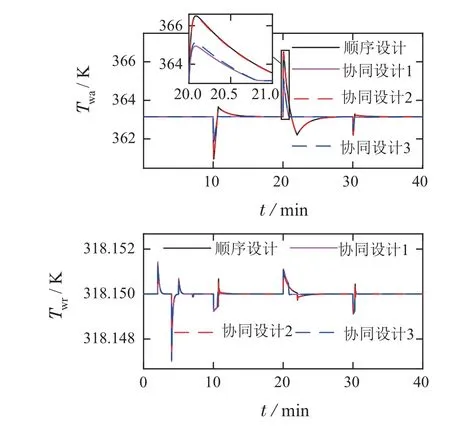
图9 不同设计方法的控制效果Fig.9 Control effects of different design methods
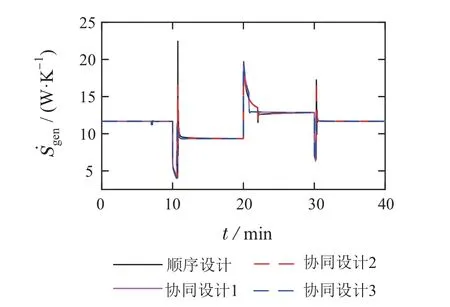
图10 不同设计方法的熵产率变化Fig.10 Changes in entropy generation rate of different design methods
4.3 控制器参数整定分析与比较
为比较不同控制器参数整定方法对热流系统控制效果影响,采用频域整定方法[20]和Skogestad[24]提出的简单内模控制(simple internal model control,SIMC)整定方法设计控制器,与协同设计方法3 所优化出的控制器进行比较.表4为基于频域方法整定的PID参数以及SIMC-PID参数.

表4 不同方法整定的控制器参数Table 4 Controller parameters tuned by different methods
施加图8所示扰动,控制系统以加热部件管壁温度Tw,a和散热部件管壁温度Tw,r保持恒定为控制目标,将外部热源˙Qa、工质泄漏质量流量˙mE和冷却液温度Tc的变化视为扰动.由图11可知,不管采用何种方法整定控制器,扰动对系统内各状态都有一定影响,但不同方法整定的控制器在扰动作用下表现出的抗扰能力有所不同.应对较小扰动时,如施加的冷却液温度扰动,3种方法整定的控制器都能满足控制目的,但对于较大的扰动,如热源扰动,频域方法整定的控制器无法使加热部件的管壁温度快速恢复到设定值,调节过程中会出现短暂振荡.相较之下,协同设计和SIMC整定的控制器都能使管壁温度在一个振荡周期内到达设定值.但从调节时间和超调量等指标分析,协同设计的控制器的控制效果显然优于SIMC整定的控制器.

图11 不同参数整定方法下的控制效果Fig.11 Control reseults under different tuning methods
为更直观比较不同控制器的抗扰能力,在系统的不同位置施加周期性扰动,如图12所示,在前30 min内于冷却液温度施加不同幅值与频率的周期性扰动,在30 min至60 min内于工质质量流量施加不同频率的周期性扰动.如图13所示,散热部件管壁温度Tw,r对两种周期性扰动都更为敏感,3种控制器中仅协同设计方法整定的控制器可基本抑制因扰动造成的Tw,r的周期性波动.相反的,加热部件管壁温度Tw,a仅受第2种扰动影响,3种控制器都无法抑制因扰动造成的Tw,a的周期性波动,但相比于其他方法整定的控制器,在协同设计方法所设计控制器下Tw,a波动幅值更小,对周期性扰动抑制效果更佳.因此,协同设计方法所设计控制器在抗扰上优于频域方法和SIMC方法整定的控制器.

图12 周期扰动Fig.12 Periodic disturbance

图13 不同参数整定方法下控制器的抗扰效果Fig.13 Anti-interference effect of different tuning methods
5 结论
本文以热流系统为研究对象,建立相应数学模型,通过构造基于时间序列模式距离的相关度度量函数,分析物理系统与控制器的耦合关系,在此基础上提出一种协同设计方法设计热流系统.具体结论如下:
1)基于时间序列模式距离的相关度度量函数可以有效分析物理系统与控制器的耦合关系,减少待设计参数,数据分析方法可以有效缩小设计参数范围;
2)协同设计方法所设计系统在多源扰动下的控制误差小于顺序方法设计的系统,对应控制器抗扰能力优于频域方法和SIMC方法整定的.
作为初步工作,本文的热流系统模型为理想模型,未来可以以实际工程中的热流系统为建模对象,考虑工程应用上的细节,如换热器几何结构等,并且可以进一步研究与综合能源系统的耦合关系.此外,相较于其他先进控制方法,本文所使用控制器较为简单,未来工作可进一步考虑使用其他先进控制器.
猜你喜欢
广东工业大学学报(2020年3期)2020-06-11
制造技术与机床(2018年9期)2018-09-19
同济大学学报(自然科学版)(2018年8期)2018-09-11
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年5期)2018-01-19
海外华文教育(2017年6期)2017-08-07
中国塑料(2017年2期)2017-05-17
制冷技术(2016年3期)2016-12-01
水电站机电技术(2016年1期)2016-02-28
中国塑料(2014年5期)2014-10-17