
3T1R并联机构运动学分析与多目标优化设计
2024-03-11 09:09张莉,朱磊
机械设计与制造工程 2024年2期
张 莉,朱 磊
(1.江苏安全技术职业学院机械工程系, 江苏 徐州 221011)
(2.中国矿业大学材料与物理学院, 江苏 徐州 221116)
三平移一转动(3T1R)并联机构广泛应用于高速分拣、搬运和码垛等工程应用领域[1-2]。近年来专家学者对3T1R并联机器人机构的研究越来越多[3]。如章鹏程等[4]构造的新型3T1R力触觉主端操作并联机构;刘伟等[5]根据位移流形理论对具有固定转动轴线和变转动轴线特性的3T1R机构进行构型综合,设计了具有两种运动模式的3T1R并联机构;沈惠平等[6]根据并联机构拓扑结构设计理论提出一种低耦合度三平移一转动并联机构;Zhao等[7]提出一种具有空间三维移动且绕z轴转动的4PPa-2PaR结构的四自由度并联机器人,具有几何对称、运动学简单、平移工作空间沿直线方向无限扩展等优点。基于以上研究内容,本文提出一种具有三平移一转动的四自由度2-P(RPR_RRR)R并联机器人机构。
1 机构设计
1.1 机构模型介绍
图1为2-P (RPR_RRR) R并联机构结构简图,支链1和支链2均由RRR构成,Ri1∥Ri2∥Ri3(i=1,2),Ri1∥Ri3⊥Pi2(i=3,4),其中R14、R24均垂直于动平台平面。动平台内切圆半径为r,R11到P1与R21到P2的距离均为m1,R31到P1与R41到P2的距离均为m2。移动副P1和P2的最大位移为l1,移动副P32和P42的最大位移为l2。机构三维模型如图2所示。

图1 2-P(RPR_RRR)R并联机构结构简图

图2 2-P(RPR_RRR)R并联机构三维模型
1.2 机构的自由度计算
进行自由度分析前需要确定每个回路方程的独立位移方程数[8],分析过程如下:
1)确定第1个独立运动回路位移方程数,第1个独立运动回路由单开链SOC{P1-R11-R12-R13-}与SOC{-R31-P32-R13}构成:
ξL1=dim{Mb1∪Mb2}=
(1)
式中:ξL1为第1个回路的独立位移方程数,Mbi为每条支链的方位特征集,t表示移动副,r表示转动,dim为方位特征集的维数。
第1个独立运动回路子并联机构的自由度为:
(2)
式中:F1-2为第1个独立运动回路的自由度,fi为支链第i个运动副的自由度,ξLj为第j个回路的独立位移方程数。
2)确定第2个独立运动回路位移方程数,子并联机构由单开链SOC{P2-R21-R22-R23-}与SOC{-R41-P42-R24}构成:
ξL2=dim{Mb1∪Mb2}=
(3)
第2个独立运动回路子并联机构的自由度为:
(4)
3)确定第3个独立运动回路位移方程数,第3个独立运动回路由单开链SOC{-R14-}与SOC{-R24-}构成:
ξL3=dim{MR∪(MH1∩MH2)∪MR}=4
(5)
并联机构自由度F1-2-3为:
(6)
式中:MR为单开链SOC{-R14-}的方位特征集,MH1和MH2分别为混合支链1和混合支链2的方位特征集。
由上述分析可知,机构执行末端具有空间三维移动和绕z轴转动的运动特性。
2 运动学分析
2.1 位置逆解分析
在底座、动平台上定义静坐标系{o-xyz}、动坐标系{o-uvw}。根据位置输出位姿向量p(x,y,z,θ)T分析得到主动副输入位移(d1,d2,d3,d4),将动坐标系下的位置坐标转换成静坐标系下坐标的转换矩阵TOP为:
(7)
式中:θ为旋转角度。
Ri4点在动坐标系下的坐标向量pR14(0,-r,0)T和pR24(-r,0,0)T,利用坐标转换原理可得Ri4点在静坐标系下坐标向量:
(8)
根据位置特点,可得逆解表达式:
(9)
2.2 位置正解分析
可根据式(9)推导得到位置正解(x,y,z,θ)表达式:
(10)
根据上述正解表达式可知机构的位置正解有4组。
2.3 位置逆解算例分析
随机生成几组(x,y,z,θ)值,利用式(9)得到输入位移值(d1,d2,d3,d4),令r=0.2 m,m1=0.1 m,m2=0.1 m,得到的位置逆解算例见表1。

表1 逆解算例
由表可知,一组(x,y,z,θ)参数只能得到一组运动输入值。
2.4 位置正解算例分析
根据2.3节的结构参数和表1的部分运动输入值,通过式(10)得到正解(x,y,z,θ),详见表2。

表2 正解算例
算例分析得到的正解和表1的逆解可以相互验证,证明了正解公式的正确性。
3 奇异分析
3.1 机构雅可比矩阵

(11)
其中:
M12=M13=M14=M21=M23=M24=M31=M42=0
M11=M22=1
M32=-2(m2-y+rcosθ)
M33=2(z-m1)
M34=2(m2-y)
M43=2(z-m1)
M41=-2(m2-x+rcosθ)
M44=2(m2-x)
式中:JX为正雅可比矩阵,Jd为逆雅可比矩阵。
由此可计算得到:
(12)
式中:det()表示矩阵行列式的值。
3.2 逆解奇异性分析
逆解奇异满足条件为det(Jd)=0且det(JX)≠0,令det(Jd)=0,即d3=0或d4=0两种情况。由于移动副的限制,这类情况无法出现,因此这类奇异不存在。
3.3 正解奇异性分析
正解奇异满足条件为det(Jd)≠0且det(JX)=0,令det(JX)=0,即{z=-m1,x=y},当R31、R41、p共面时正解奇异出现。正解奇异如图3所示。

图3 正解奇异
4 工作空间分析
工作空间是评价并联机构运动性能的重要指标[9]。取动平台半径r=0.2 m,m1=0.05 m,m2=0.05 m;移动副P1和P2的最大位移l1=0.4 m,移动副P32和P42的最大位移l2=0.4 m。采用蒙特卡洛法完成可达工作空间以及定姿态工作空间搜索。
4.1 可达工作空间分析
选择上述尺寸参数进行并联机构工作空间算例分析,搜索得到的可达工作空间如图4所示。
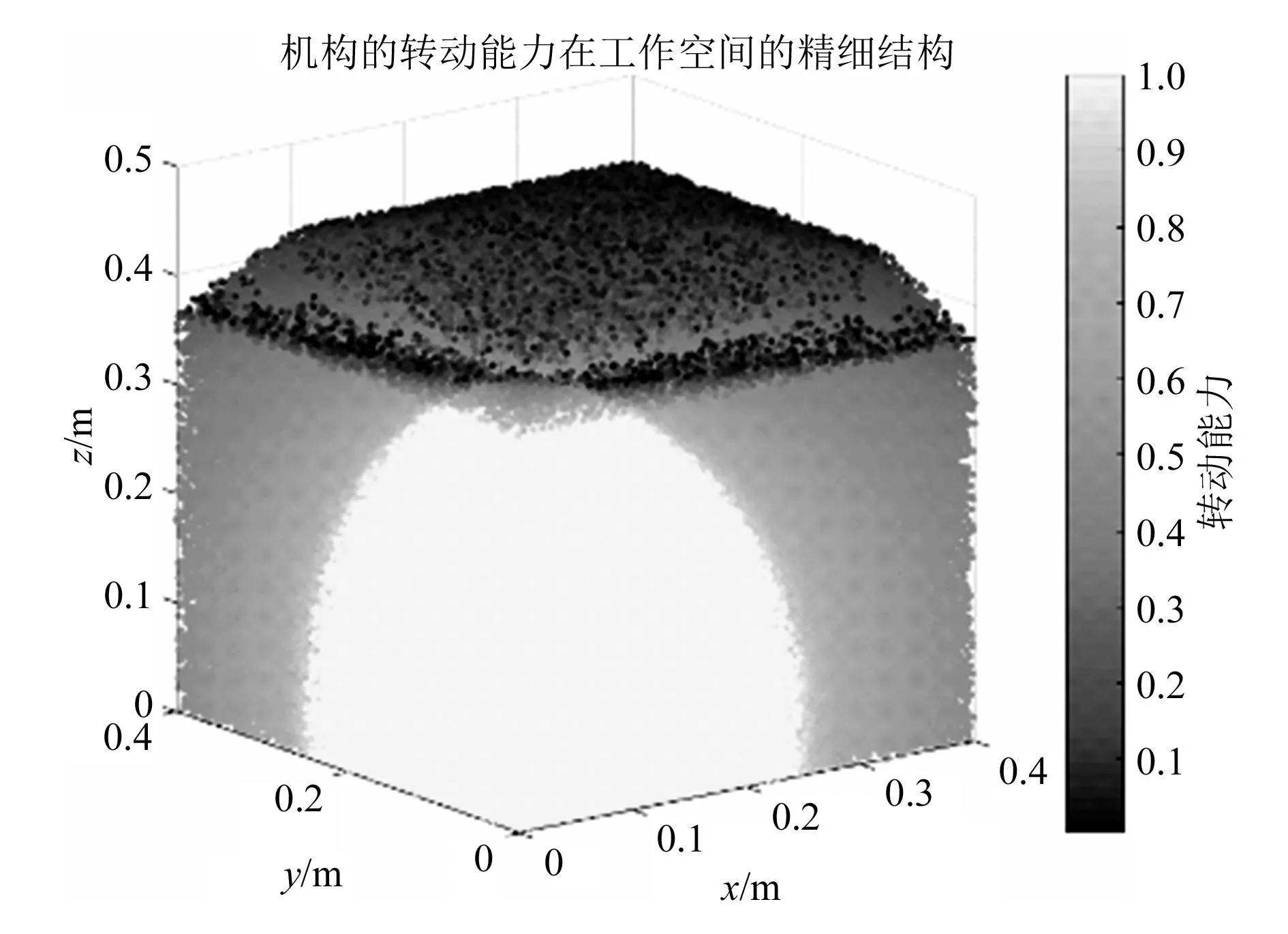
图4 3T1R机构可达工作空间转动能力分布图
由图可得:工作空间呈对称分布,沿着各个投影面为正方形,沿着z轴方向呈中间高两边低分布;无空洞且边界光滑。
4.2 定姿态工作空间分析
以姿态角0°、60°、120°作为算例对机构在不同姿态角下的定姿态工作空间进行分析,如图5所示。

图5 3T1R机构定姿态工作空间图
分析可知:姿态角越大所对应定姿态工作空间越小,且不同姿态角下沿着xoy投影的形状均为正方形;姿态角为0°、60°时的定姿态工作空间接近于正方体,姿态角为120°时的定姿态工作空间为1/4半锥形。
4.3 转动能力分析
选择上述尺寸参数进行搜索得到转动能力,即机构的执行末端在可达工作空间内的任意点的最大转角范围,得到不同高度下的转动能力(本文用数值量化转动能力),如图6所示。

图6 3T1R机构可达工作空间转动能力分布图
由图可知,绝大部分工作空间的转动能力都较大(指标大于0.5),在靠近z轴的部分有较大的空间转动能力,这部分体积占比为25.13%。分析不同高度截面下的转动能力可知:整周转动的面积逐渐减少,并且形状为正方形。
5 多目标参数优化设计
5.1 优化模型的建立和算法选择
为了选取合适的机构设计参数,现以工作空间体积和全局转动能力作为优化设计目标,建立机构的多设计参数多目标优化模型,分别以工作空间体积V和转动能力指标T为优化目标,具体约束如下所示。
(13)
(14)
优化采用NSGA-II算法[10]。其中,经典算法选择迭代次数为100、种群大小为300,适应度计算方法采用非支配排序法,重组方式选择分散重组,交叉分布数量为20,变异分布数量为20。,得到了约束条件下的Pareto优化前沿解集,如图7所示。

图7 Pareto优化前沿解集
由图可知,在体积小于0.85 m3的区域,全局转动能力都在0.92以上,在这个区域两个优化目标背离程度较低;在体积大于0.85 m3的区域,转动能力迅速降低,此时两个优化目标背离程度较大,体积为0.98 m3时,全局转动能力已经降到0.62。可以根据需求从此优化前沿解曲线中,获得满足两个目标的参数值,部分的Pareto优化解列于表3中,并得到转动能力占比η。

表3 部分Pareto解
5.2 优化算例
根据5.1节仿真结果,列出了部分参数下的转动能力空间分布,如图8所示,并且计算整周回转的工作空间占比,见表4。可以发现参数优化后整周回转工作空间占比都较高,第二组参数得到的最高占比为95.0%,形状接近于一个长方体,第4组参数转动能力为1的占比为87.6%。通过算例和多目标能够指导实际的参数选择,以此平衡转动能力和工作空间大小。

表4 整周回转的工作空间占比

图8 优化后的工作空间
6 结束语
本文构造的结构简单、具有解析式位置正解的2-P(RPR_RRR)R并联机器人机构可以改变执行末端姿态方向且可以沿着任意方向移动。根据奇异性分析可知,机构不存在逆解奇异,当动静平台共面且支链1和支链2移动输入位移相同时,机构存在位置正解奇异。研究表明:机构的操作性能较好,具有较大的可达工作空间和定姿态工作空间;工作空间边界光滑、对称分布,无明显空洞情况。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
实用手外科杂志(2015年2期)2015-08-28
饲料博览(2015年4期)2015-04-05
北京航空航天大学学报(2014年1期)2014-12-19
