幅相误差对体积阵MVDR 波束形成的影响
2024-03-14 03:42焦君圣郭世旭
水下无人系统学报 2024年1期
黄 燕 ,焦君圣 *,郭世旭 ,赵 鹏
(1.中国计量大学 原位计量教育部重点实验室,浙江 杭州,310018;2.中国计量大学 计量测试工程学院,浙江 杭州,310018)
0 引言
扩展阵的本质是一种双圆环体积阵[1-2],相比于传统的垂直接收基阵,体积阵的水平孔径更大,具有更大的空间增益,从而提高了声呐的性能[3-4],但是对波束形成也有更高的要求。
阵列信号处理技术[5-7]作为信号处理的重要分支,被广泛应用在声呐、雷达及通信等领域,其相关研究始于20 世纪40 年代,1960 年后,自适应阵列信号处理技术获得迅速发展。Capon[8]提出最小方差无畸变(minimum variance distortionless response,MVDR)波束形成算法,该算法可以自适应地使阵列在保证期望方向上信号输出功率不变的前提下,使波束输出功率达到最小[9-11],并根据这一原则求出最佳权向量,再用该权向量对阵列输入信号进行加权求和,得到阵列输出。与常规波束形成相比,MVDR 波束形成在理想阵列模型下抗干扰能力更强,阵列增益更高,并且具有更好的角度分辨率,因此被广泛应用于线阵和圆阵等阵列中。但存在阵列误差时,协方差矩阵估计就与实际不符,从而导致导向矢量失配。而阵列误差往往由各水听器通道不一致所带来的幅相误差引起,因此研究幅相误差对MVDR 波束形成的影响具有重要意义。
在这一方面,Vural[12]研究了存在幅相误差时,自适应波束形成在不同输入信噪比(signal-to-noise ratio,SNR)下的性能损失,输入SNR 越大,自适应波束形成的性能损失越大;Compton[13]研究了自适应波束形成对误差的敏感性,认为误差越大,自适应波束形成的输出信干噪比越敏感;Godar[14]推导了存在误差时最佳波束形成器的输出信号功率和输出噪声功率的表达式,认为当存在误差时,输出噪声功率和输出信号功率均会增大;Su 等[15]分析了幅相误差对MVDR波束形成器空间谱的影响,得出了幅度误差和相位误差越大,空间谱的最大值越小的结论。但上述研究没有给出存在幅相误差时,MVDR 波束形成器输出SNR 和阵增益等的具体表示式,而且这些研究多是针对传统的线阵,少有针对体积阵对幅相误差的敏感性研究。
文中从统计学角度对存在幅相误差时体积阵的协方差矩阵、MVDR 波束形成器的输出SNR 以及阵增益进行了理论推导,并通过计算机进行了仿真验证,同时分别对存在幅度误差和相位误差时的体积阵MVDR 波束形成器的方位估计均方根误差进行了统计与分析。
1 体积阵建模
图1为体积阵结构示意图,其由12 个臂组成,从整体上来看,该体积阵是由上下2 层双圆环阵所构成,参与波束形成的阵元数量较多,因此能够获得较高的空间增益,相比于均匀线阵,体积阵可同时对方位角和俯仰角进行波达方向定位(direction of arrival,DOA)估计,具有更好的估计性能。
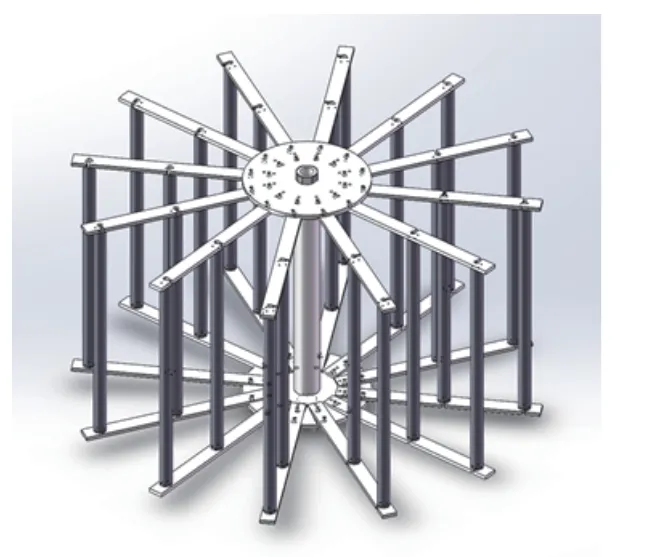
图1 体积阵结构图Fig.1 Structure of volume array
由于该体积阵的上下层阵列形状一致,因此只对其中一层进行建模。图2为体积阵在三维坐标中的模型,在2 个半径不同的圆环上,各有M、N个无指向性的阵元构成双圆环阵列,其中内环半径为r1,外圆环半径为r2,且每个圆环上的阵元均匀分布。以双圆环的圆心为原点建立三维坐标系,内圆环上的第m个阵元与原点之间的连线与x轴的夹角为φm=2π(m-1)/M,外圆环上的第n个阵元与原点之间的连线与x轴的夹角为φn=2π(n-1)/N,设波数为k=2π/λ的窄带平面波的方向为-r入射到阵列,信号的俯仰角 θ0∈[0,π/2]是z轴和信号入射方向之间的夹角,而方位角 φ0∈[0,2π]是从x轴正方向开始的在阵列平面上逆时针投影到入射信号方向的角度。则该体积阵方向矢量为

图2 体积阵模型Fig.2 Volume array model
2 阵元通道幅相误差影响分析
2.1 相位误差对体积阵MVDR 波束形成的影响
在理想条件下,双圆环阵的基阵响应向量为
式中: θ为信号源的俯仰角;φ为信号源的方位角;M和N分别为内圆环和外圆环的阵元数。
在不考虑幅度增益的情况下,假设每个水听器通道输出信号的随机相位误差为γi(i=1,2,···,M+N),它们相互独立,均值为零,方差为,其正态密度函数为
相位误差矩阵为
设γm、γn(m,n=1,2,···,M+N)分别为2 个不同通道的相位误差,由 于γm和γn相互独立,因此γm与γn的联合密度函数为
由式(11)可将实际协方差矩阵可化简为
由式(12)可知,当存在相位误差时,目标信号的等效协方差矩阵和噪声的等效协方差矩阵分别为
式中,Rs、Rn分别为理想条件目标信号和噪声信号的协方差矩阵。与理论的协方差矩阵相比,存在相位误差时噪声的协方差矩阵增加了1 个对角项,相当于引入了一个功率为的白噪声,而目标信号的实际协方差矩阵缩小到其理论值的倍。因此存在相位误差时的实际等效输入SNR为
因此,当存在相位误差时,输入SNR 会减小,并且相位误差越大,输入SNRS就越小。
利用式(2)与式(12)得到MVDR 的最佳权向量
当MVDR 波束形成器的波束方向指向水下目标时,波束输出中目标信号功率Psa(θ,φ)和噪声功率Pna(θ,φ)分别是
则此时圆阵MVDR 的输出SNR为
由式(21)可知,相位误差对MVDR 波束形成器输出SNR 的影响表现为: 相位误差越大,输出SNR 越低。
MVDR 波束形成器的输出阵增益为
由式(22)可知,随着相位误差的增大,阵增益将减小,且SNR 越大,阵增益减小得越明显。
2.2 幅度误差对体积阵MVDR 波束形成的影响
在不考虑相位误差的情况下,假设只存在幅度误差,各水听器通道输出信号的随机幅度误差hi(i=1,2,···,M+N)均为正态随机变量,且其数学期望E{hi}=0,方差为Var{hi}=,则 幅度误差hi的概率密度函数为
幅度误差的对角阵为
实际输出信号的协方差矩阵为
协方差矩阵中的对角元素为
由于hm、hn(m,n=1,2,···,M+N,m≠n)是相互独立的随机变量,有
从式(31)可以看出,存在随机幅度误差时的协方差矩阵比理论值多了1 个I,因此目标信号的等效协方差矩阵和噪声的等效协方差矩阵分别为
体积阵的等效输入SNR 可表示为
此时体积阵MVDR 波束形成器的输出SNR为
由式(34)和式(35)可知,水听器通道随机幅度误差对体积阵MVDR 波束形成输入SNR、输出SNR 的影响规律为: 随着幅度误差的增大,实际输入SNR 越来越小,输出SNR 也减小。
而存在随机幅度误差时的阵增益为
从式(36)可以看到,幅度误差的存在也会使MVDR 波束形成器的阵增益减小,且随着幅度误差的增大,阵增益越来越小,同时,当输入SNR增大时,阵增益减小的程度也更大。
2.3 幅相误差同时存在对体积阵MVDR 波束形成的影响
假设相位误差γi和幅度误差hi同 时存在,且 分别满足式(5)和式(23),则此时幅相误差的对角阵为
实际输出信号的协方差矩阵
根据式(26)、(27)和式(30)得
将式(11)代入式(39)中,得
此时目标信号和噪声的等效协方差矩阵分别为
体积阵MVDR 波束形成器的输入SNR、输出SNR 和阵增益分别为
从式(43)~(45)可以看到,幅度误差和相位误差同时存在时对体积阵MVDR 波束形成器的输入SNR、输出SNR 和阵增益并无相互抑制作用,并且二者越大,体积阵MVDR 波束形成器的输入SNR、输出SNR 和阵增益均越小。
3 仿真与分析
设体积阵共有48 个阵元,分为上下2 层,每1 层有2 个圆环阵,且内环和外环的阵元数均为12 个,每1 个圆环上的阵元均匀分布,内环半径为0.41 m,外环半径为0.65 m。假设水下目标的俯仰角为30°,方位角为20°,仿真过程中,假设各阵元的随机幅度误差和随机相位误差均为正态随机变量,且只针对 θ=30°的垂直方向进行仿真。
不考虑幅度误差,图3为不同相位误差下体积阵MVDR 波束形成的输出SNR 以及阵增益的仿真结果。从图中可以看出,相位误差存在时,输出SNR 和阵增益均呈现减小的趋势,随着相位误差的增大,阵增益减小的幅度逐渐减小,在输入SNR 较高时,输出SNR 减小的幅度也逐渐减小。

图3 输出SNR 及阵增益随相位误差变化曲线Fig.3 Variation of output SNR and array gain with phase error
图4为存在相位误差时,不同输入SNR 下体积阵MVDR 波束形成器的输出SNR 与阵增益的仿真结果。图中,虚线为不存在相位误差时的理想输出SNR,其余为不同相位误差下输出SNR 随输入SNR 的变化曲线。从图中可以看出,当目标信号的输入SNR 较低时,相位误差对体积阵MVDR 波束形成器输出SNR 的影响很小,但随着输入SNR 的升高,相位误差对输出SNR 的影响越来越大,而MVDR 波束形成器的阵增益则越来越小,与理论相符。

图4 输出SNR 及阵增益随输入SNR 变化曲线Fig.4 Variation of output SNR and array gain with input SNR
假设目标输入SNR为30 dB,入射角度仍为20°,其他条件不变,在不同相位误差下对基阵接收信号作MVDR 波束形成,并记录其波束角 θi,经多次实验,计算出方位估计的标准差,其计算公式为
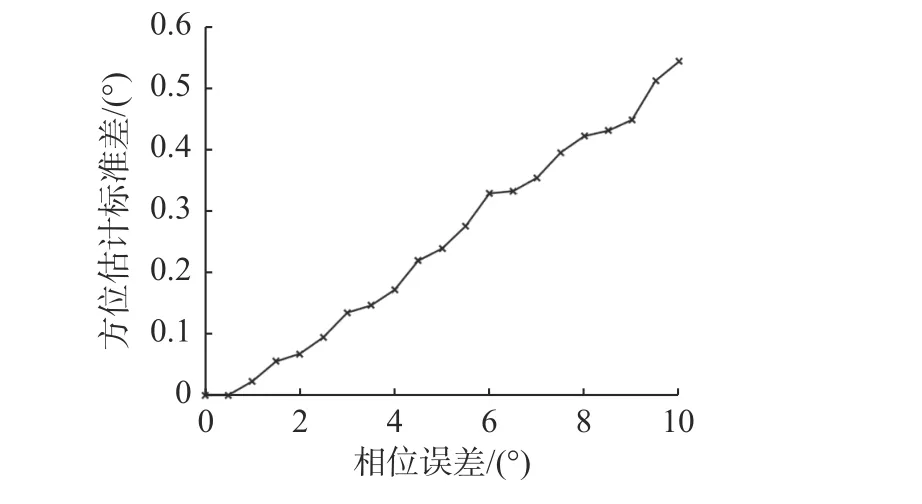
图5 方位估计标准差随相位误差变化曲线Fig.5 Variation of azimuth estimated standard deviation with phase error
其他条件不变,假设不考虑相位误差,在不同幅度误差下对体积阵作MVDR 波束形成,计算其输出SNR 以及阵增益。仿真结果如图6 所示,可以看到,幅度误差的存在将会使MVDR 波束形成器的输出SNR 及阵增益减小,且随着幅度误差的增大,输出SNR 与阵增益均越小。
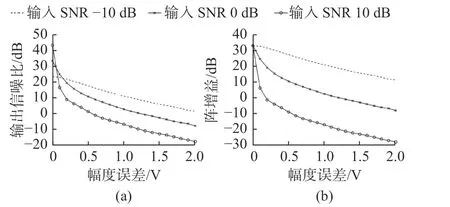
图6 输出SNR 及阵增益随幅度误差的变化曲线Fig.6 Variation of output SNR and array gain with amplitude error
图7为幅度误差为0.2 dB 时,输出SNR 和阵增益虽输入SNR 的变化曲线,仿真结果显示,与存在相位误差时的影响相同,在高SNR 下幅度误差也会对MVDR 波束形成器的输出SNR 与阵增益产生影响,且输入SNR 越大,存在幅度误差的输出SNR 与理想输出SNR 相比降低得越多,阵增益也同理。
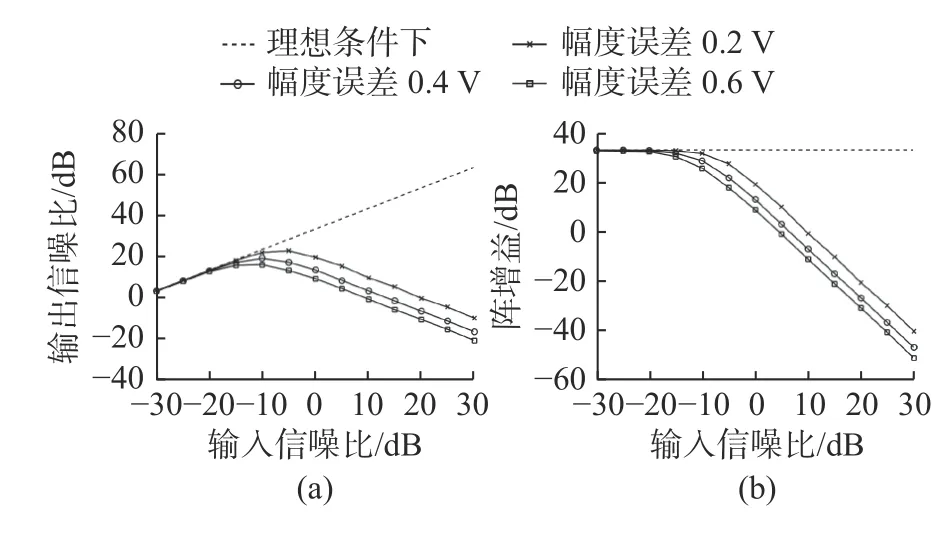
图7 输出SNR 与阵增益随输入SNR 变化曲线Fig.7 Variation of output SNR and array gain with input SNR
仿真过程中目标信号的功率为1 dB,图8 表明,当幅度误差的均值小于1.414 时,MVDR 波束形成器仍旧有较精确的波束指向性,但是当幅度误差逐渐增大,目标便淹没在噪声中,MVDR 波束形成器方位估计失效。
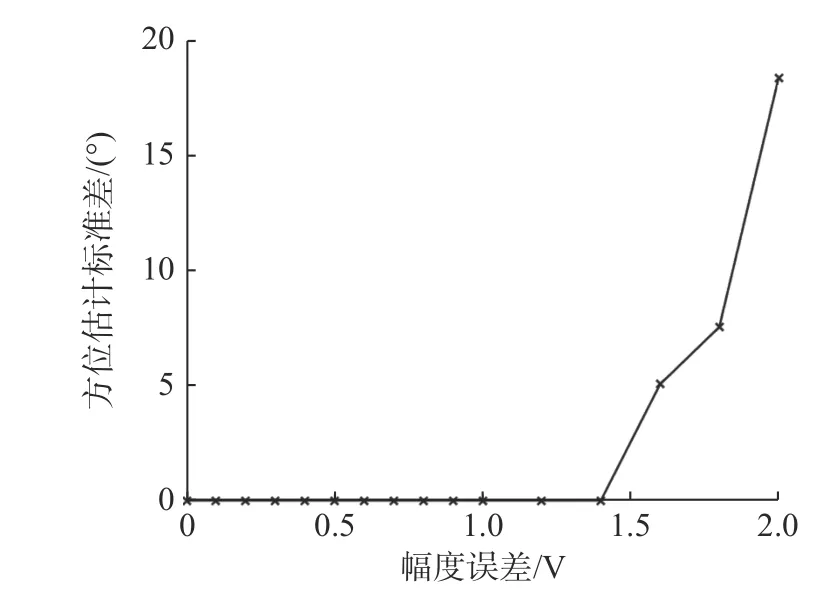
图8 方位估计标准差随幅度误差变化曲线Fig.8 Variation of azimuth estimated standard deviation with amplitude error
实际中,幅度误差和相位误差同时存在,假设输入SNR为10 dB,其他条件不变,图9为MVDR波束形成器输出SNR 和阵增益随幅相误差变化的二维曲线。
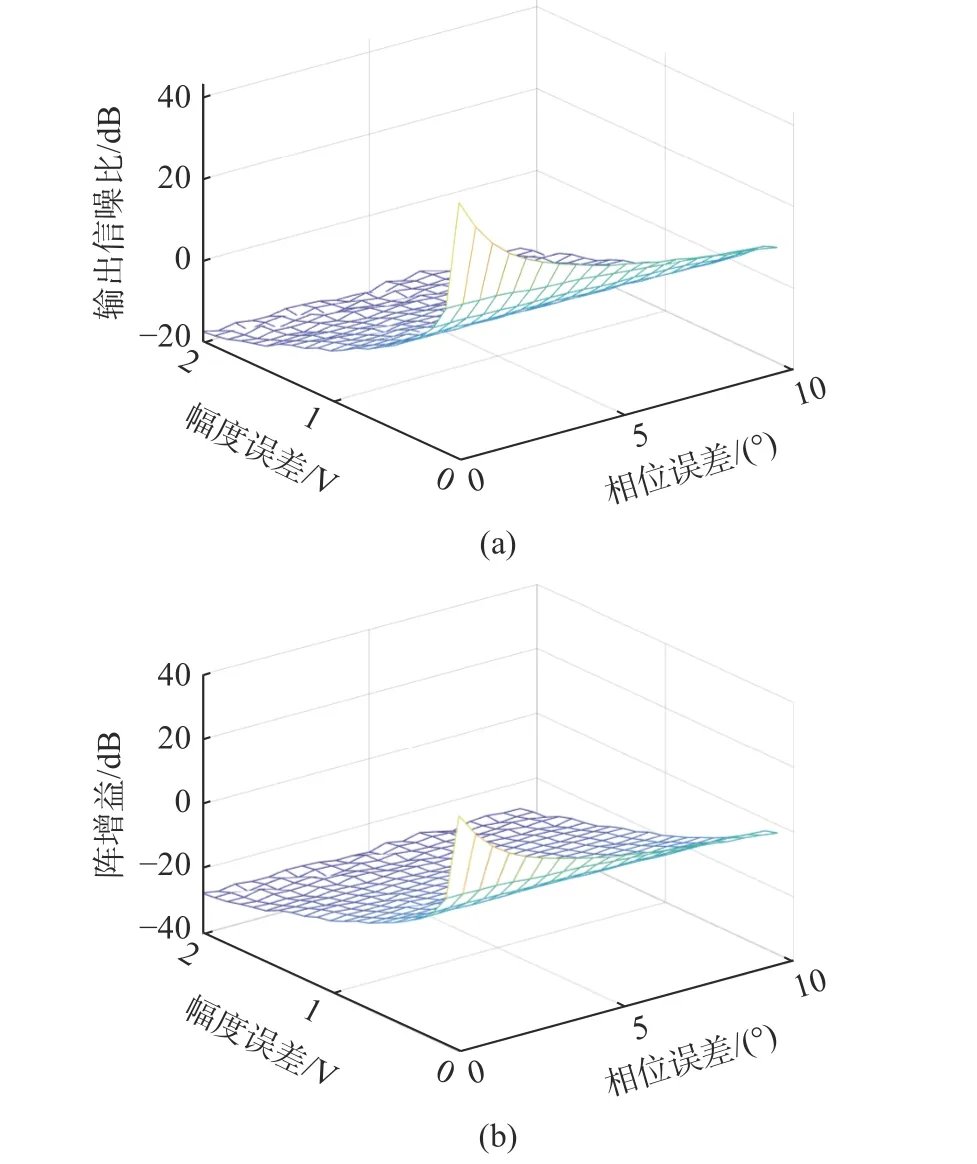
图9 输出SNR 和阵增益随幅相误差变化曲线Fig.9 Variation of output SNR and array gain with amplitude-phase error
仿真结果表明,体积阵MVDR 波束形成器的输出SNR 随着幅度误差和相位误差的增大均呈下降趋势,但是当存在幅度误差时,二者随相位误差的变化下降幅度会更小;同样,当存在相位误差时,随着幅度误差的增大,输出SNR 和阵增益随幅度误差下降的幅度也更小。
4 结束语
受幅度误差和相位误差的影响,MVDR 波束形成的方位估计性能下降,文中在建立存在幅相误差的体积阵阵列模型的基础上,对 MVDR 波束形成器的输入协方差矩阵、输出SNR、阵增益和方位估计标准差进行了统计分析与仿真验证。结果表明,幅度误差和相位误差均会对体积阵MVDR波束形成带来较大影响,这2 种误差越大,MVDR波束形成器的输入SNR、输出SNR 以及阵增益均越小;输入SNR 越高,MVDR 波 束形成器输出的阵列增益越小,并且相比于幅度误差,相位误差对MVDR 波束形成的方位估计精度影响更大。
越来越复杂的水下环境对波束形成的精度提出了更高的要求,后续将考虑校正体积阵的协方差矩阵,利用阵列相关矩阵结构的先验知识来提高体积阵MVDR 波束形成的稳健性。
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25
数学年刊A辑(中文版)(2022年4期)2022-02-16
现代畜牧科技(2021年4期)2021-07-21
现代畜牧科技(2021年5期)2021-07-20
科学技术创新(2021年11期)2021-05-25
数学物理学报(2018年5期)2018-11-16
电子技术与软件工程(2018年4期)2018-03-23
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
自动化学报(2016年8期)2016-04-16
雷达学报(2014年4期)2014-04-23