光纤光栅滑触感知和分类训练的材质识别方法
2024-03-16 07:12潘睿智冯艳刘贺祥王昊祥张洪溥张寅祥张华
光子学报 2024年2期
潘睿智,冯艳,刘贺祥,王昊祥,张洪溥,张寅祥,张华
(1 上海工程技术大学 机械与汽车工程学院, 上海 201620)(2 上海市大型构件智能制造机器人技术协同创新中心, 上海 201620)(3 南昌大学 先进制造学院, 南昌 330038)
0 引言
智能感知技术越来越多地运用到工业生产中,极大地提高了效率和准确率。其中,触觉传感器作为一种模仿人类触觉的器件,能够感知人体以及外界环境的运动、形变和压力等信息,在智能机器人和智慧医疗等领域具有广阔的应用前景[1-2]。目前常用的触觉传感器类型主要分为压阻式[3]、电容式[4]、压电式[5]等,用于传递所感知到的材质表面信息与温度信息等。然而这些传感器存在着一定的局限性[6]:电学传感器由于依赖电压电流变化进行感知,信号处理复杂,且易受振动、高频刺激、静电等外部因素影响,此外部分电学传感单元本身还需借助于电源(静态功耗),限制了应用范围并增加了不稳定性[7]。
相较于传统电信号类传感器,光纤布拉格光栅(Fiber Bragg Grating,FBG)具有抗电磁干扰、高灵敏度、良好的柔韧性等特点。FBG 对满足布拉格条件的光信号产生反射,可实时精确测量微小的力或形变与温度变化,通过分析FBG 中心波长变化,能够获得材质、接触力、温度等触感信息。北京航空航天大学许会超等[8]利用3×3 的FBG 阵列矩阵作为柔性传感元件设计的机器人柔性触觉传感器具有0.16 nm/N 力灵敏度,验证了FBG 在触觉感知上具有良好的线性度和重复性。PRASAD A 等[9]提出一种基于FBG 触觉传感器测量表面厚度和形状的新方法,通过多支点机械杠杆位移增强方法将表面特征传输到FBG,表面位移分辨率高达15.64 nm,验证了FBG 传感器的高精度与快速响应的特点。
随着机器学习和神经网络等前沿技术的兴起,特征提取、模型训练方法与触觉感知相结合,已成为国内外科研热点之一。浙江大学陈稼宁[10]利用PDMS、导电橡胶、PET 基底以及RTV,组成了柔性触觉传感阵列,进行滑移检测,并结合相位差算法和神经网络算法提取纹理表面信息来实现触觉传感。NASCIMENTO K P[11]利用FBG 阵列传感器配合机器学习的Decision Tree 分类算法和回归算法来估计水位,传感结果的均方根误差为3.56 cm。
目前基于FBG 触觉感知的研究主要集中在利用采集的中心波长感知外部应变与压力,从而实现对滑移定位、冲击定位、表面粗糙检测等的测量。钱牧云等[12]利用FBG 的温度传感特性与各材质之间热传递不同的特点实现了对铝、铁、塑料的分类标定,为FBG 应用于材质识别铺垫了理论基础,但存在识别效率慢等问题。利用FBG 的高灵敏性和快速响应特性,将大量谐振波长变化数据应用于神经网络模型,实现材质分类识别的研究相对较少。
本文利用接触表面材质粗糙度、粘滑[13]等特性的差异,设计搭建了FBG 硅橡胶感知单元,并进行滑触感知分析,通过提取FBG 中心波长的均值最大差、极差、标准差等数据特征,构建基于支持向量机(Support Vector Machine, SVM)算法的高识别率的分类模型,设计上位机实现滑移控制和在线识别。相比基于Transformer 机器识别的材质识别[14],本文方法不受光线等客观因素影响,采用最直观的滑触感知,同时具有更好的分类识别效果。
1 FBG 硅橡胶滑触感知平台
FBG 硅橡胶滑触感知平台包括FBG 硅橡胶感知单元和滑移机构,由于不同材质表面特性存在差异,通过滑移可使FBG 获得不同程度的持续性应变。
1.1 FBG 硅橡胶感知单元
硅橡胶感知单元为具有方形凹槽的基台,方形凹槽中浇灌有两层硅橡胶(透明流淌型卡夫特705 透明有机硅密封胶),两层硅橡胶之间封装有FBG 传感器,如图1。在方形凹槽的基台中先浇灌一层液态硅胶底,固化后在中线特定位置埋入FBG,再浇灌一层实现对FBG 的封装,液态硅胶固化过程中可以很好地贴合FBG 传感器,同时确保上表面与被测材质接触面的水平。硅橡胶能够在拉伸或压缩后迅速恢复原状,提供变形保护,同时有效地传递外部应变或压力到光纤光栅。

图1 FBG 硅橡胶感知单元Fig.1 FBG silicone rubber sensing unit
1.2 滑移机构设计
滑移机构还包括步进电机、滚珠丝杠、连接件,如图2,滑块通过连接件与滚珠丝杠相连,以实现与硅橡胶进行相对滑移。在槽口的一端进行预应力拉伸,保证FBG 精准测量、高灵敏度、实时监测的优势。另一端槽口的尾纤与解调仪相连接,实时记录FBG 中心波长数据。

图2 滑移机构示意Fig.2 Schematic of sliding mechanism
步进电机与滚珠丝杠通过丝杆滑台相连,步进电机通过连接件推动滑块在硅橡胶上经过FBG 进行水平滑移,保证滑移时滑块速度的稳定和受力恒定。通过将接触材质作为唯一的变量,最后记录启动到结束时FBG 中心波长的变化数据,作为材质识别的依据。
2 理论分析
2.1 FBG 传感器原理
FBG 属于波长调制型传感元件,光栅被刻入纤芯中,呈周期性排列,用于反射特定波长。基于菲涅耳反射原理,当一束宽带光源射入光纤光栅中,由于光纤的折射率不同会发生反射和透射现象,只有满足特定波长条件的光信号才会被反射回来,其余的光信号会透射出去,从而实现分光和滤波的功能。因此透射光谱上会产生凹陷,而在反射光谱上呈现一个波峰[15-16],如图3。
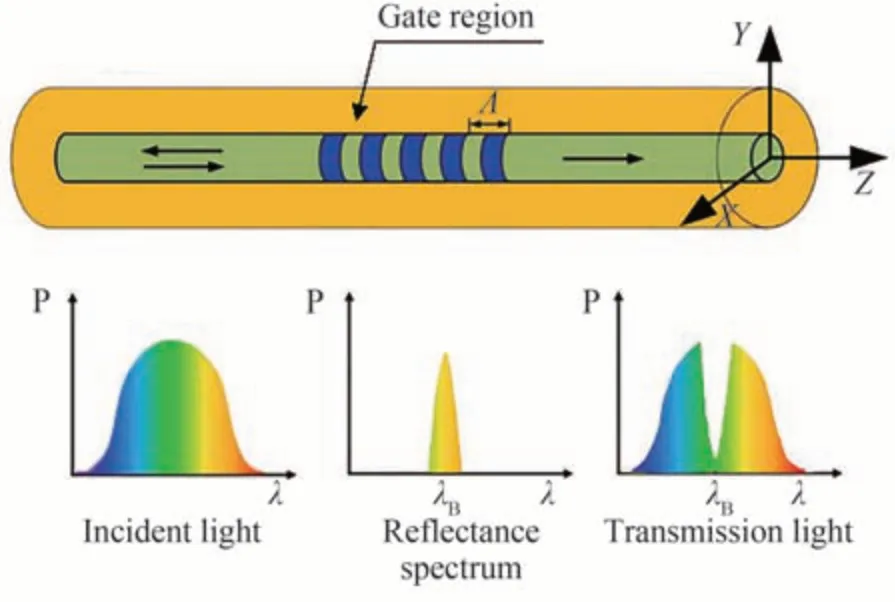
图3 FBG 的光传输特性Fig.3 Optical transport characteristics of the FBG
反射光的中心波长λB由FBG 特性决定,满足以下条件[17]。
由式(1)可知,波长由纤芯的有效折射率neff和光栅周期Λ决定。当光纤布拉格光栅受到外界应力和温度的作用时,受弹光效应和热光效应的影响,光纤光栅的有效折射率和光栅周期都会发生变化,导致反射波峰发生偏移。反射的中心波长λB可以表示为[18]
式中,ΔλB为中心波长偏移量,Kε=1-pe为应力作用下波长应变灵敏度系数,其中pe为有效弹光系数;KT=α+ξ为光纤光栅温度传感的灵敏度系数,其中α为热膨胀系数,ξ为热光系数;Δε为应变变化量;ΔT为温度变化量。本文选用常见的SMF-28e 光纤类型和10 mm 栅区长度的FBG,初始中心波长为1 550 nm,波长偏移与应变之间的线性系数为1.22 pm/με,与温度变化的线性系数为10.8 pm/℃。FBG 传感器的应用原理在于,通过读取FBG 反射光的中心波长映射动态的物理量。在本文滑触感知与材质分类研究中,提取的信息主要为中心波长的偏移量,
式(2)中的ΔT主要来自于环境温度的变化以及滑移时摩擦产生的热效应。由于滑触感知过程采集的时间较短(5 s 以内),因此环境温度的变化可以忽略不计;同时,假设摩擦热效应的能量全部转换为热量,并传递至硅橡胶。经过计算,摩擦热效应导致的ΔλB小于1 pm,仍可忽略不计。所以,式(2)可简化为
由此可知,1 pm 解调精度的FBG 解调仪下, FBG 传感器可感知到最低0.82 με 的应变。
2.2 滑触感知的材质分类原理
在FBG 硅橡胶感知单元周围截取一小块基体微元,剖面变形分析如图4,实线表示受力前,虚线表示受力后。建立坐标系,设硅橡胶在x轴方向的长度为l,受到摩擦力为F,微元变形量为Δl,高度为ℎ,宽度为b。
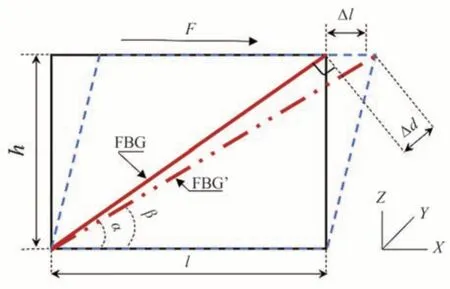
图4 剖面应变分析Fig.4 Profile strain analysis
假设物体与硅橡胶不发生相对滑动,根据材料力学中应变的基本定义与剪切应变定义可得
式中,剪切弹性模量G为材料系数。剪切弹性模量由其他材料常数确定G=E/2(1+v),其中弹性模量E、泊松比v均为常数,故而G也为常数。
根据角度关系可得
根据应变定义可得
根据式(4)~(6)以及式(3)可得
当α=0°时,ΔλB取得最大值,即当光纤光栅传感器水平嵌入封装时(如图1),其灵敏度最大,波长变化为
由于不同材质滑移受到的摩擦力F不同,ΔλB也会各不相同的持续性变化,作为接收不同材质表面特性的变量。将由静止到滑移结束过程中的中心波长变化规律作为不同材质之间的差异特征,利用机器学习的分类训练,建立分类模型,实现波长数据变化与材质类别之间的联系。
3 波长数据特征与分类
材质表面粗糙度、滑移等特征通过FBG 中心波长表现出来,提取适当的数据特征值,形成数据集,用于分类训练。最后,通过建立的分类模型,实现材质的在线识别。
3.1 数据采集
在滑移感知研究中,以聚乳酸(Polylactic Acid, PLA)、粗布、800 目砂纸三种材质为样本进行试验。PLA 为3D 打印滑块的耗材,直接用于滑移,粗布与800 目砂纸则固定于滑块与FBG 硅橡胶感知单元接触的一面。三种材质中,粗布质地较为柔软,滑移时与硅橡胶之间粘性最小,PLA 与800 目砂纸的触感相近。为保证被测材质接触面为滑移过程中唯一差异,将滑块的质量都设置为100 g,如图5。使用电脑上位机来控制单片机,单片机发送脉冲使滑台匀速水平移动,推动滑块由基台的一端经过FBG 至另一端,进行15、10、5 cm/s 三种速度的滑移测试。槽口的另一侧外接FBG 解调仪,在各材质滑块开始滑移时开始记录FBG 中心波长,以20 Hz 频率进行FBG 中心波长数据的保存。由于各材质滑块滑移路径与FBG 中心波长采集频率相同,不同速度下采集到的波长数量不同。

图5 滑块与表面材质Fig.5 Slider and surface material
3.2 分类特征设定
常规提取特征的方法为计算中心波长变化的平均数(Ave)或中位数(Mid)。但该方法受FBG 迟滞性[19]影响,导致每次滑移初始中心波长不相同,如图6,各材质采集点1 的中心波长不等,使得所提取特征存在初始干扰因素。基于此,本文提出更为合适的三维特征信息:均值最大差、极差、标准差。

图6 三种材质与中心波长关系Fig.6 Three materials versus center wavelength
在滑移过程中,每次滑移将产生一组变化的中心波长,表面材质所具有的特征也将映射至这些数据中。三种材质在15 cm/s 滑移速度下采集的中心波长数据如图6。
由图6 可知,在每组中心波长数据中都存在突变点A。这是由静摩擦转变为动摩擦过程中的突变所产生的,即从静止过渡到运动发生的粘滑现象。此外,由于表面各接触单元的粗糙特性,中心波长会围绕初始中心波长浮动,且随着滑块移动到基台的另一侧而趋于稳定。各材质在滑触感知过程中存在着不同的波长变化规律,需提取合适的数据特征来实现对材质特有波长规律的分类归属。因此,本文选择集中趋势和离中趋势[20]进行特征提取。其中,集中趋势主要包括中位数、平均数,用以描述数据的中心位置;离中趋势主要包括极差、标准差、方差,用以描述数据的离散程度。
在选取集中趋势数据特征时,考虑到FBG硅胶滑触感知单元存在迟滞性,所以不直接采用平均中心波长,而采用均值最大差值Δλ(max_diff)=λB (max)-间接表示集中趋势。离中趋势特征则选取极差 Δλ(range)=λB (max)-λB (min)和标准差 Δλ(std)=来表示。在分类归属后本文特征映射流程原理如图7。
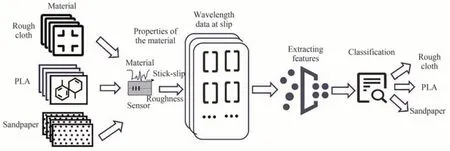
图7 特征映射流程原理Fig.7 Schematic of feature mapping process
将本文办法与直接采用中心波长数据作为特征和常规的平均数、中位数作为特征的方法进行对比。对比数据集设定为15、10、5 cm/s 滑移速度下的中心波长数组以及三者的混合数组。一次15 cm/s 滑移可采集约40 个波长数据;一次10 cm/s 滑移可采集约60 个波长数据,一次5 cm/s 滑移可采集120 个波长数据。
即中心波长分类训练法所有波长(40~120 个)都直接作为数据特征,常规分类训练法具有2 个数据特征,本文采用的均值最大差、极差、标准差的分类训练法具有3 个数据特征。
将以上三种特征提取方法统一采用三次SVM 算法进行分类训练,训练好分类模型后,再使用交叉验证法进行准确度计算。最后进行准确度对比,其中混合是将三个滑移速度下的样本数据集混合后进行分类训练,结果如表1。

表1 各数据特征三次SVM 分类模型的准确度Table 1 Accuracy of SVM classification models for each data feature three times
各分类特征方法训练效果如图8 中的混淆矩阵所示。混淆矩阵是一种特定的矩阵用来呈现分类算法性能的可视化效果,通常应用在监督学习中。其每一列代表预测值,每一行代表实际的类别。
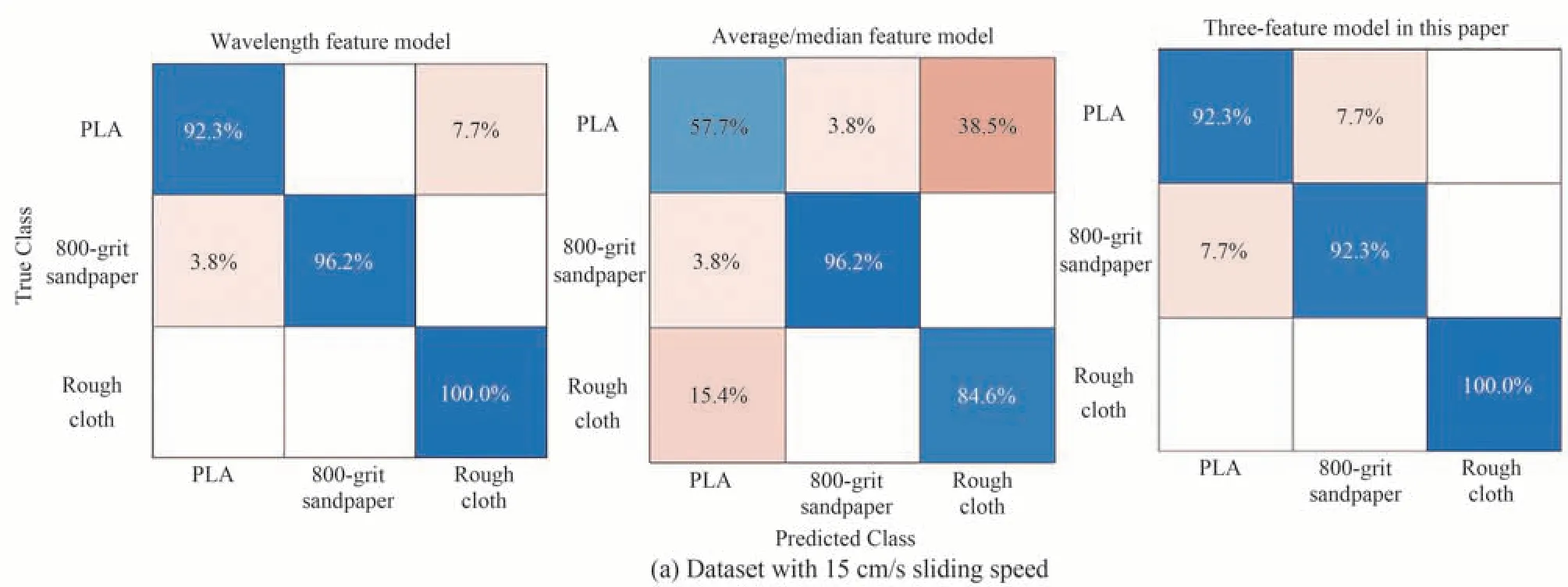
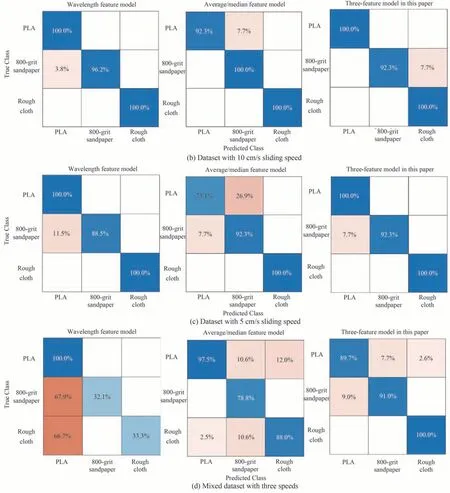
图8 混淆矩阵Fig.8 Confusion matrix
直接选用波长数据作为识别特征,在相同特征个数下具有良好的分类效果。然而,进行不同速混合分类时,由于波长特征数量不同(即10 cm/s 为60 个特征,15 cm/s 为40 个特征,5 cm/s 为120 个特征),导致分类准确度大幅度下降,并且数据量过大,不适用于分类模型训练。同时,本文的三个特征分类训练法与常见的平均数与中位数分类训练法相比,具有更高的准确度,并且能更好地应对初始中心波长偏移和滑移速度改变带来的干扰。
4 材质分类算法及上位机控制方法
4.1 材质分类训练原理
使用支持向量机(SVM)[21]训练分类模型和设计预测函数。SVM 本质是量化两类数据的差异,主要包括线性SVM、二次SVM 和三次SVM 以及高斯SVM 四种分类方法。
本文的FBG 滑触传感器在材质识别应用中,分类训练的目的是根据采集到的特征数据来区分不同的材质类型,以15 cm/s 滑移速度的中心波长数组为例,提取特征后,78 个(3 种材质×26 次数据)三维信息点情况如图9。图9(a)中的柱状表示三维特征的平均值,误差线为各数据特征的波动范围,其中Δλ(max_diff)主要由粘滑现象所致,平均值分别为0.011、0.041、0.054;Δλ(range)与Δλ(std)则主要受粘滑现象与滑移整体阻力的影响,平均值分别为0.044、0.127、0.091 与0.012、0.03、0.022。图9(b)中散点表示该材质在单次滑移后波长数据的特征值,三种材质的散点存在较为明显的空间区分,粗布由于本身粘性小和柔软的特点,其灰色散点在三维图中最接近原点。
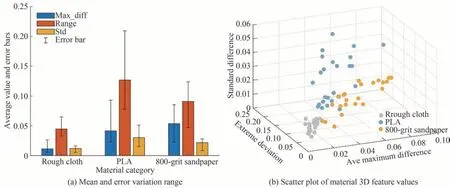
图9 各材质三维特征值Fig.9 Three-dimensional characteristic values of each material
提取三维特征作为映射材质差异特性的分类方法,其数据集可表示为n样本×3 维度的矩阵每个样本点表示一个3 维的特征向量。
线性SVM 通过设定线性超平面W1Δλ(max_diff)+W2Δλ(range)+W3Δλ(std)=0 来进行数据区分,其中W为变量的权重,用于确定最优超平面。二次SVM 和三次SVM 使用多项式核函数来进行特征映射,构建非线性超平面来分隔数据点。二次SVM 使用二次多项式核函数,而三次SVM 使用三次多项式核函数。高斯SVM 是一种非线性分类方法,它通过将数据映射到高维特征空间并利用高斯核函数来计算样本之间的相似性。高斯SVM 的超平面在高维特征空间中构建,可以有效地处理非线性问题。
对于粗布、PLA、砂纸800 目三种材质的分类问题,SVM 分类算法可以扩展到多分类问题。一种方法是使用一对多(One-vs-Rest)策略,文中为一对二,即为每个类别训练一个二分类SVM 模型。本文是三种材质分类问题,因此需要建立三个支持向量机模型。训练中将该类别视为正例,而其他所有类别视为负例。然后,通过将验证样本传递给所有二分类模型,并选择具有最高置信度的类别作为预测结果。另一种方法是一对一(One-vs-One)策略,即为每对类别训练一个二分类SVM 模型。训练完成后,可以通过预测新样本的类别来进行分类。
4.2 优化分类模型与材质识别
选择5、10、15 cm/s 混合234 次滑移共约17 160 个中心波长作为原始数据,提取每次滑移中本文设计的三种数据特征。这些特征构成了234 样本×3 维度的矩阵数据集。
通过迭代算法和交叉验证技术,根据最小分类误差值进行模型评估,寻找最优的SVM 分类模型。将训练后的模型用于后续的预测,材质识别提供了准确性和可靠性最优的解决方案。根据图10 迭代次数与最小分类误差关系可知,最终选定模型的最小分类误差为0.034 124,具有96.6%的准确度。同时,建立了模型函数“trainModel.mat”,通过输入三个特征的具体数值,可以输出对应的材质类别,步骤流程如图11。

图10 迭代次数与最小分类误差关系Fig.10 Number of iterations versus minimum classification error

图11 材质识别步骤Fig.11 Material recognition step-by-step
4.3 上位机系统
利用MATLAB 的App Designer 进行上位机软件设计,作为控制系统,系统的硬件实物如图12。
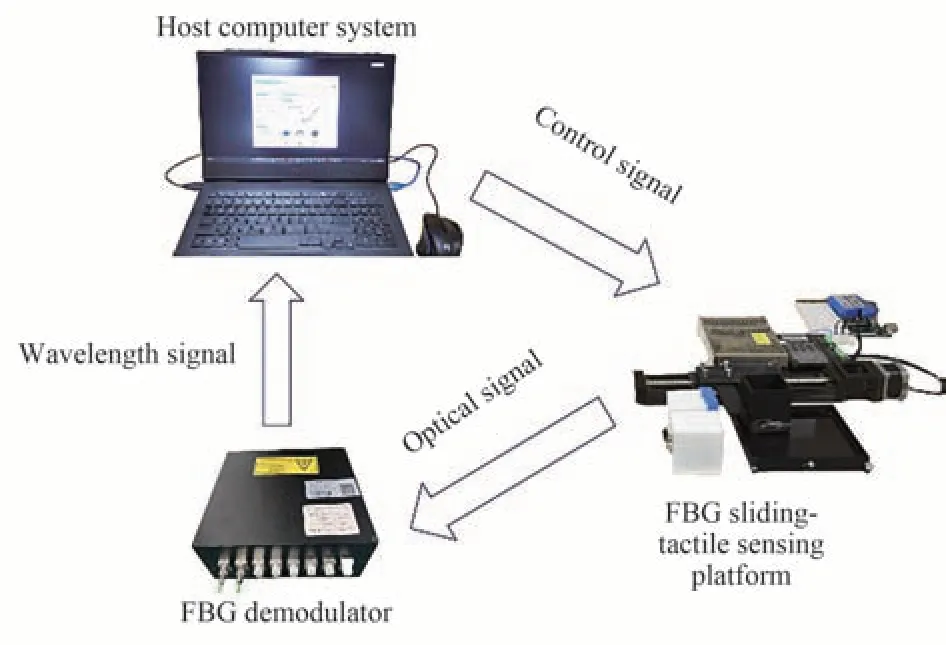
图12 系统硬件实物Fig.12 Photo of the system hardware
以单片机作为下位机,控制滑块的滑移。单片机发送脉冲信号驱动电机转动。上位机中输入的滑移速度v(单位cm/s)与单片机输出脉冲频率f的转换关系为
式中,θ为步距角,P为丝杆导程乘积。
材质预判的上位机设计, 主要功能为显示收集的中心波长,并提取三个数据特征保存至数组t_test,利用预测函数trainedModel.predictFcn(t_test)进行材质预判。
滑台控制与在线材质识别系统上位机如图13,其具有控制滑移平台滑移速度、显示采集中心波长与三维特征值、在线材质识别的功能。
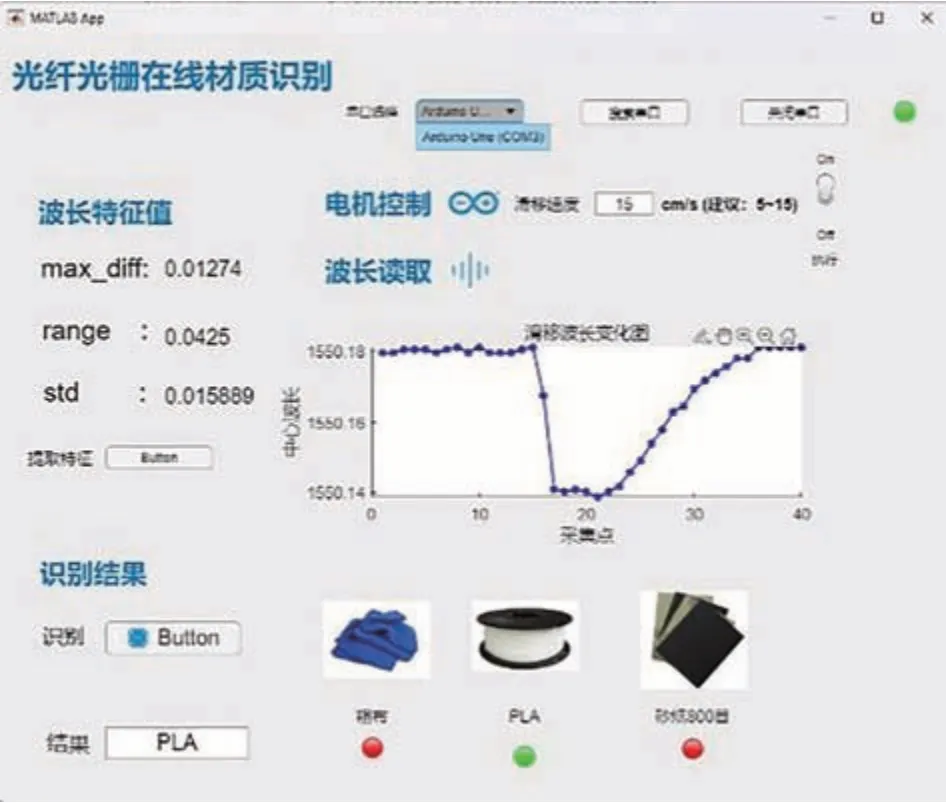
图13 上位机界面Fig.13 Host computer interface
4.4 验证测试结果
由于所有的数据集为5、10、15 cm/s 滑移速度时的波长信息。验证测试时上位机随机设定5~15 cm/s的滑移速度进行触觉感知,即中心波长采集。同时为保证试验的科学性与合理性,选用滑移接触表面材质时,每种材质的测试样品选择三个,每个样品进行四次范围内的随机速度滑移,共计36 次试验(3 类材质×3 个样品×4 次滑移),预判结果如表2,识别结果与分类模型准确度相近。

表2 测试结果Table 2 Results of the tests
5 结论
以FBG 硅橡胶滑触感知单元为基础,实现了在线材质识别。针对粗布、PLA、砂纸800 目三种材质,通过对接触表面材质的粗糙度、粘滑现象等差异特性的感知和数据特征提取,利用SVM 算法进行分类训练并优化,建立具有96.6%准确度的分类模型,可实现对不同材质的准确识别。在5~15 cm/s 随机滑速的36 次验证测试中正确识别了34 次,验证了本文方法在实际应用中的可行性和有效性。研究结果表明,FBG 传感器在材质识别和触觉感知方面具有很大的应用潜力,可为智能感知机器人提供一种在线材质分类识别方法。
猜你喜欢
特产研究(2022年6期)2023-01-17
中国测试(2018年10期)2018-11-17
实用口腔医学杂志(2017年6期)2017-09-19
中国照明(2016年4期)2016-05-17
中国塑料(2015年9期)2015-10-14
橡胶工业(2015年8期)2015-07-29
橡胶工业(2015年6期)2015-07-29
真空与低温(2015年4期)2015-06-18
物理实验(2015年9期)2015-02-28
河南科技(2015年2期)2015-02-27