载人月球探测混合云架构体系仿真系统研究
2024-03-17 04:28王慎泉周克亮
宇航学报 2024年1期
赵 毓,王慎泉,王 平,黄 震,周克亮,张 琦
(1.北京空间飞行器总体设计部,北京 100094;2.中国航天员科研训练中心,北京 100094;3.广东航宇卫星科技有限公司,汕头 515041;4.哈尔滨工业大学航天学院,哈尔滨 150001)
0 引言
进入21 世纪以来,月球探测迎来新热潮,以中美两国为代表的各航天大国相继发射了多枚探测器,积极开展月球资源探索和利用活动[1]。开展载人月球探测活动并建立月球基地关乎国家太空利益:为了实现宇航员重返月球目标,美国出台了“阿尔忒弥斯计划”[2];中国也将在不久的将来开展载人登月任务[3]。实施载人月球探测的核心目标是拓展生存空间,实现人类在地外长期生存,需要开展系统、连续的月球探测和相关技术试验验证工作。这一过程周期较长,且涉及的系统和技术较多,应建立载人月球探测体系,便于统筹规划发展过程和指导任务决策制定。
载人月球探测是一项耗资巨大、参数众多、异常复杂的系统工程。考虑到在相关任务制定和执行过程中,无法让各系统多次遍历所有活动情景,且受限于月球低重力、强辐射、大温差等特殊条件,在地面难以模拟月球真实复合环境工况。为了降低研究难度和研发成本,可以利用仿真技术提供接近真实的月面环境和全面完备的虚拟实践手段,支持方案快速迭代验证和在轨预示等工作。随着载人月球探测相关技术快速发展,以及应用需求的不断深入,现有仿真系统难以满足全周期体系设计、规划与多方案比较的需要。在相关仿真系统开发方面,除计算能力和资源调度等基础问题有待解决外,还需满足多系统集成、信息频繁交互、辅助设计与评估等需求,急需开发能够支持载人月球探测复杂体系推演分析的仿真系统架构,支撑载人月球探测体系设计与仿真评估工作。
国外已开发数百种各类体系仿真系统,应用到陆、海、空、天等任务联合演习中,针对航天器系统的典型综合仿真系统包括美国NASA 早期开发的SSDSE(Spacecraft system design &simulation environment)系统[4],丹麦为ESA 开发的实时Sim SAT 系统[5],以及被航天学者们熟知的STK(Satellite Tool Kit)仿真系统[6]。近期,NASA 还公布了专门为阿尔忒弥斯任务开发的月面活动实时仿真系统,可以模拟推演并展示载人登月任务全过程[7]。
21 世纪初,随着深空探测计划的全面实施,中国也逐步建成了多个面向各类航天器型号研发设计与任务模拟的仿真系统,包括嫦娥二号飞行控制支持系统[8],嫦娥五号仿真验证系统[9],火星地表环境可视化仿真系统[10],月球取样返回器半实物仿真系统[11]和基于模型的系统工程仿真系统[12]等。
上述系统的支撑技术仍以高性能计算机集群为主[13-14],难以适应载人月球探测体系研究涉及的多型号、多任务和复杂交互的仿真分析问题。基于以上分析,面向首次载人登月任务及未来月球科考与开发活动,针对长期实施载人月球探测计划相关软硬件规模逐渐扩展、多任务并发联动、复杂人-机-环交互等特点,本文提出一种基于混合云架构的载人月球探测体系仿真系统,解决多系统扩展集成和复杂交互操作问题。该仿真系统既能为型号设计研制过程中的任务规划、多方案模拟与快速分析提供依据,又能支持航天器和航天员在轨任务模拟与预示。
本文首先围绕载人月球探测航天器主要设计阶段和仿真应用模式,对体系仿真系统建设的需求进行分析,对基础功能进行分解。随后根据体系仿真任务需求设计基于混合云的仿真平台总体框架,并给出模型管理、场景编辑、算法调度等主要模块的基本方案,给出面向典型任务场景的仿真支持库建设方案。然后分别给出体系建模、任务规划、推演展示、效能评估和系统联动与扩展关键技术的实现方案。而后利用该体系仿真系统对典型月面活动任务场景中的多种方案开展仿真推演,并对结果进行比较分析。最后对载人月球探测体系仿真系统未来发展进行展望。
1 仿真系统需求分析
面向载人月球探测任务的长期发展,梳理出建立载人月球探测体系仿真系统的核心需求包括高保真推演展示、以MBSE(Model based system engineering)数字化技术为支撑、更通用、更体系、更灵活和完全自主可控。其中,更通用是指体系仿真系统具有多平台移植和多系统联动能力,更体系是指体系仿真系统能够长期统筹支持未来所有月球探测型号工作,更灵活是指体系仿真系统具备较强扩展性,可实现多软件、多系统自由接入的高集成度开发任务。
传统系统或单机仿真以研究对象典型特征的数值求解为主要手段,目的是建立具有一定逻辑或数量关系的系统分析模型。而体系仿真是以过程分析为主要手段,目的是研究开放环境下系统间相互作用和涌现效应等复杂特征,为顶层决策提供参考依据。因此,体系仿真的重点是建立系统间关系模型,并模拟推演多系统协同作用下的事件发展,进一步分析各系统对体系的贡献情况。对应到载人月球探测任务中,可以具象为利用体系仿真系统模拟推演航天器、航天员等大系统协同任务执行情况,评估任务结果并指导相关设计优化和改进工作,可支持在研型号及未来所有月球探测航天器系统开展任务级仿真推演。
根据航天器型号设计阶段划分方法,可将载人月球探测各航天器设计任务初步分解为概念研究、可行性论证、方案设计、初/正样设计和在轨运行等多个阶段,每个阶段对仿真系统都有不同需求。特别地,在概念研究和可行性论证阶段,由于涉及多个大系统和航天器关系分析,需要建立相对全面的型号体系和技术体系,才能统筹规划型号研发和部署任务,进而提升整体效能。本文对面向型号设计的体系仿真系统需求进行梳理分解,如图1所示。
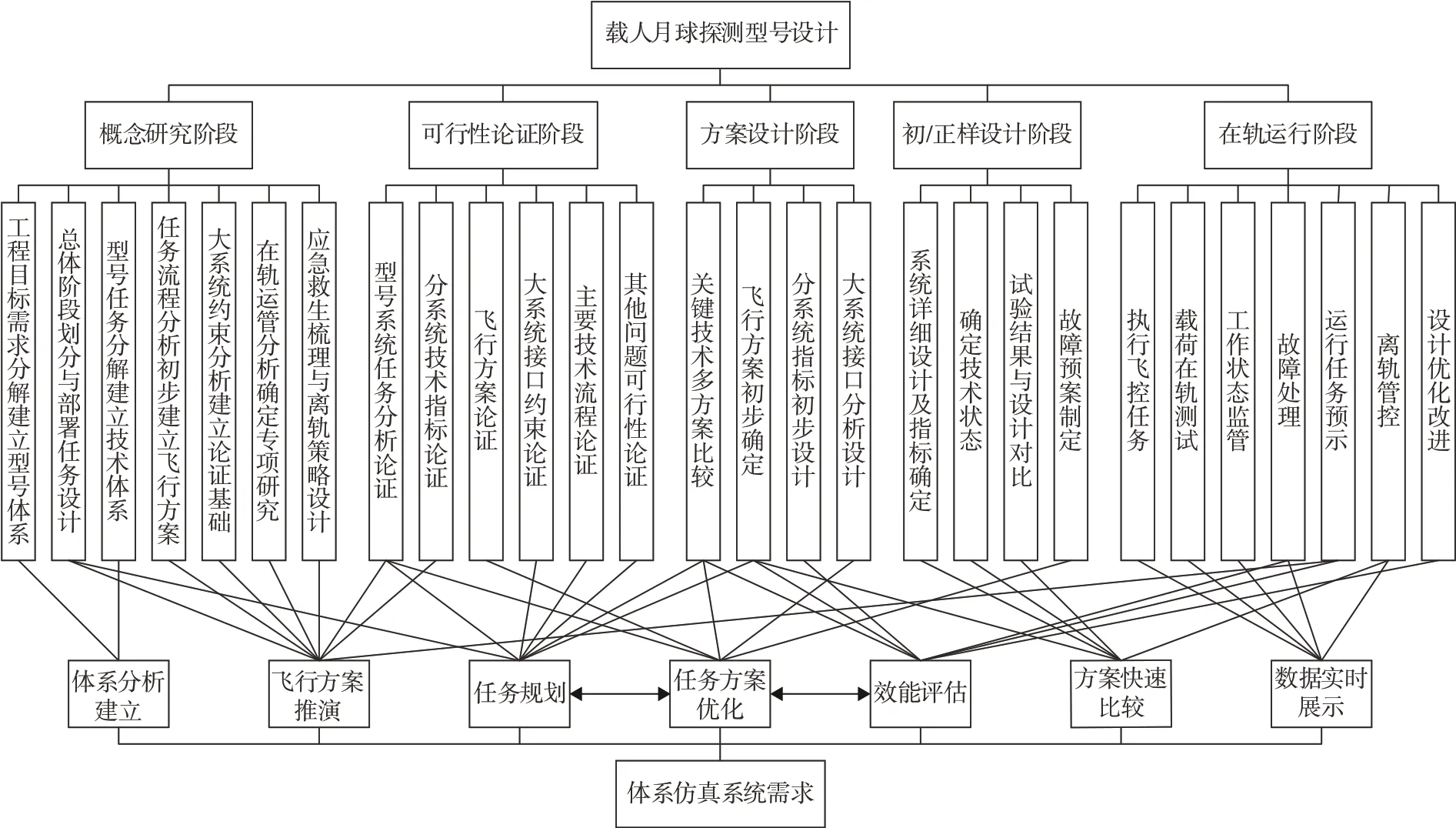
图1 型号设计过程对体系仿真系统需求分解图Fig.1 Decomposition diagram of mission design process requirements for systems simulation system
上图中仅列出了与仿真相关的设计环节。对各环节的仿真需求进行归类,得到体系分析建立、飞行方案推演、任务规划、任务方案优化、效能评估、方案快速比较、数据实时展示共7类顶层需求。其中部分需求间存在耦合关系,难以直接分解为功能需求,本文又根据仿真系统主要任务流程对应用模式进行分析,分解出体系仿真系统功能需求,如图2所示。
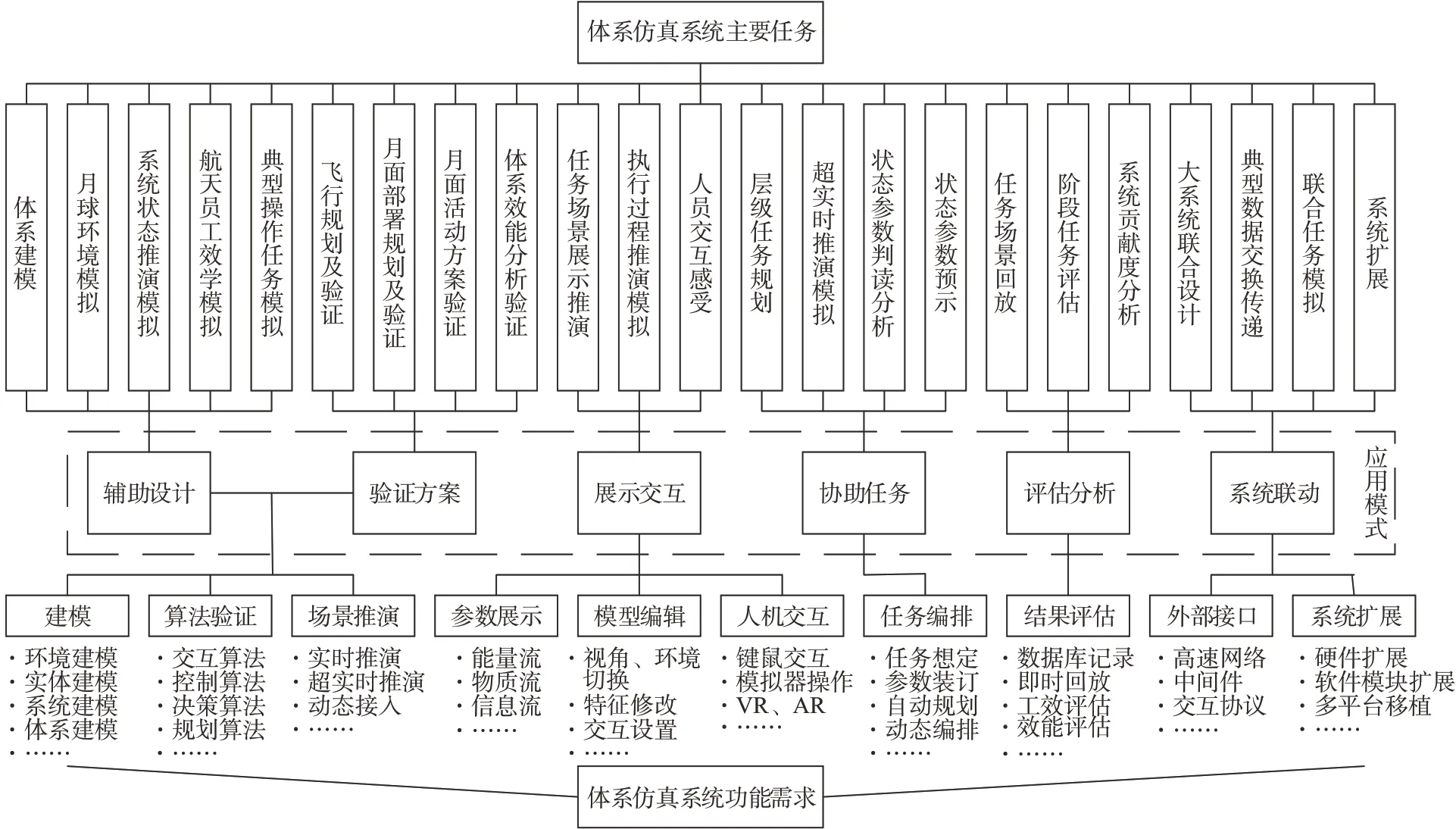
图2 体系仿真系统功能需求分解图Fig.2 Functional requirements decomposition diagram of systems simulation system
根据以上分析,体系仿真系统功能需求可分为建模、算法验证、场景推演、参数展示、模型编辑、人机交互、任务编排、结果评估、外部接口和系统扩展共10类,每一类功能还可以继续分解为多项实现技术,本文在此不逐一例举。
综合考虑仿真技术发展情况和上述两个维度梳理的各项需求,本研究确定了载人月球探测体系仿真系统的6 项关键技术,分别为:体系建模、任务规划、模拟推演、效能评估、系统交互和扩展升级。在体系仿真系统建设初期,可对各关键技术独立开展研究,随着系统开发日趋成熟,关键技术间的依赖关系和数据交互逐渐清晰,再利用体系仿真系统将其集成融合,共同完成全周期模拟推演任务。
2 总体方案
为提高载人月球探测体系仿真系统开发效率,采用模块化设计思想将该系统分成仿真平台和仿真支持库2部分并行建设。仿真平台主要实现资源管理、软件操作和交互展示,仿真支持库主要实现数学抽象、算法编制和数据管理。依此形成了图3所示的体系仿真系统组成关系图。
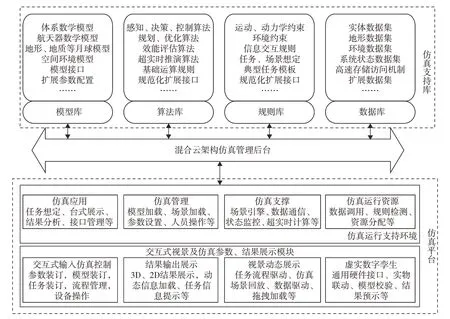
图3 体系仿真系统组成关系图Fig.3 Systems simulation system composition diagram
仿真平台面向首次载人登月任务及未来月球科考与开发阶段,为载人月球探测体系仿真系统提供大规模体系级仿真运行和管理能力,支持所有在研及未来预研型号仿真验证,为模型部署与管理、仿真运行调度、场景编辑提供底层支持服务,覆盖了仿真开发、任务规划、场景部署、模拟运行到方案评估等阶段。由于体系级仿真具有场景宏大、模型颗粒度复杂、实体数量较多等特点,该仿真平台针对性地设计了基于中间件的时空引擎,用于高效实时推进模型计算及数据通信。仿真平台的总体架构如图4所示。
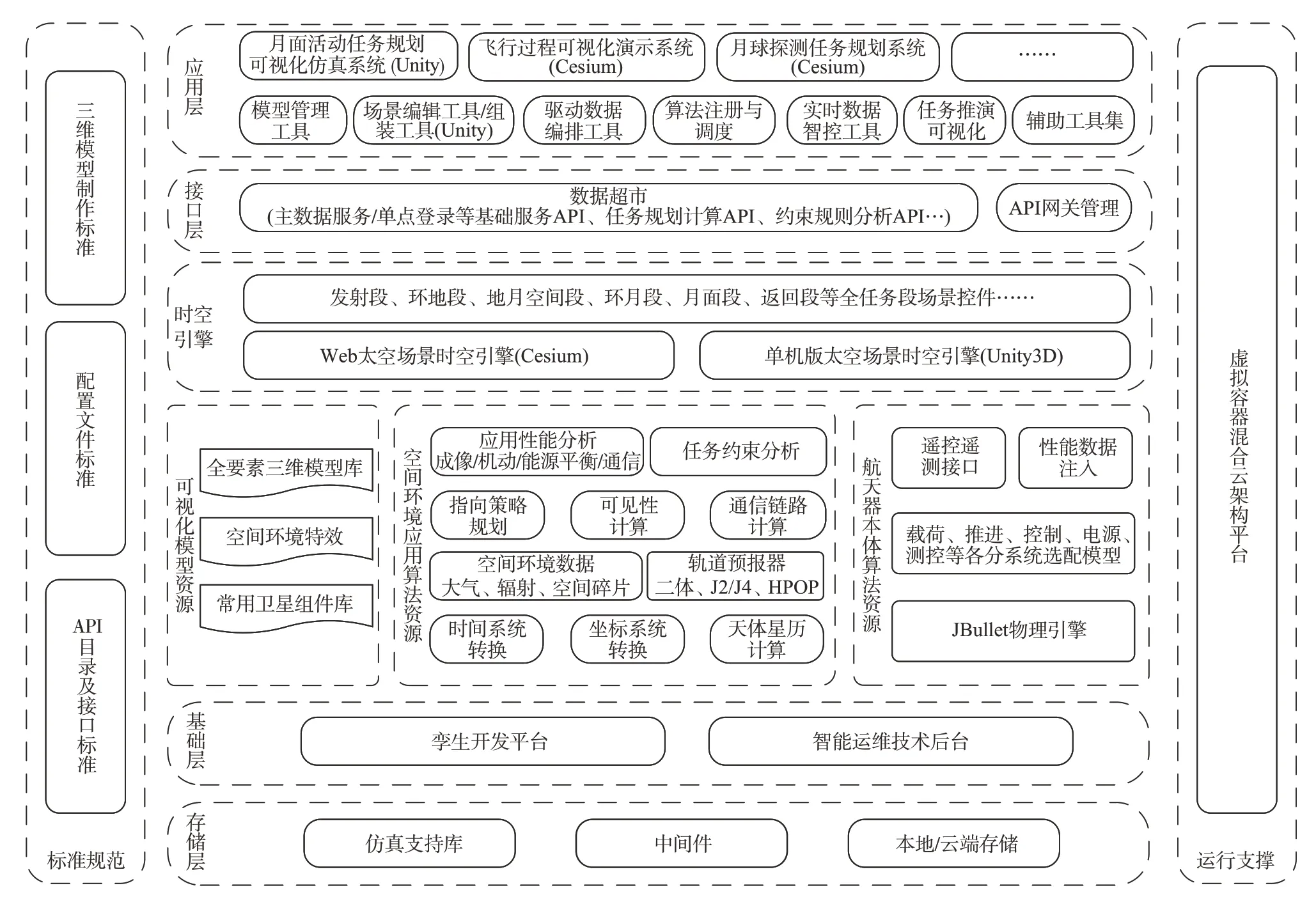
图4 仿真平台总体架构图Fig.4 Architecture diagram of simulation platform
轨道计算、测控分析、中间件等相关模块当前已有成熟技术[15-17],本文不再赘述其开发方案。类似的,图4中大部分模块只需代码实现,以下仅对应用层模型管理工具、场景编辑工具、算法注册与调度工具以及任务推演可视化共4个典型工具方案进行介绍。
模型管理工具:是可视化模型开发与调度工具,原始三维模型由外部导入,在其基础上人工或自动匹配基本物理特性、操作模式、约束参数等信息。作为视景展示的主要模块,也可为任务效能计算提供输入。设计人员可通过界面拖拽,完成各实体模型在场景中的部署。该工具主要功能包括模型文件上传、基本信息管理、物理特性配置、运动机构配置、视场配置、链路配置和操作模式配置等。
场景编辑工具:可供用户根据需求创建和发布各种月球探测任务场景,对不同场景的地形背景、活动时间、参与模型实体、任务计划安排进行配置与发布。设计人员可通过界面操作方式实现对任务想定的编辑和修改,还可通过与SysML 相关软件互动,自动生成任务序列,作为任务规划和仿真推演的输入。该工具主要功能包括地形导入、场景列表维护、场景地形选择、场景时间设置、场景模型选择、卫星轨道配置、模型状态交互编辑、活动计划配置、场景操作记录查看分析等。
算法注册与调度工具:可用于管理按照算法注册规范封装后的Restful 标准接口模块,按需组织算法全部调用流程并进行调度计算,支撑平台的专业任务规划计算服务。该工具主要功能包括算法模块注册、算法流程管理、算法流程交互编辑、算法调度执行、执行日志查询。
任务推演可视化工具:可载入用户编辑的场景,接入三维数字产品模型,利用系统提供开放式交互功能控制航天员、机器人、月球车等各类实体协同完成任务,自动记录操作过程,并提供状态监控和安全约束告警功能。完成任务推演后可记录全过程数据,快速自动生成评估设备性能、资源消耗、操作安全性等情况,并输出SysML形式模型图作为后续任务优化设计的输入。主要包括场景加载与环境仿真、航天员操作交互仿真、驾驶交互仿真、机器人作业交互仿真、任务状态监控、评估分析、辅助功能、系统接口8大部分共46个功能模块。
载人月球探测任务中部分场景与传统航天器飞行任务不同,属于开放式任务场景,各系统动态加入,拓扑关系多变且约束条件较多,没有明确的规律可以建模描述,所以在建立体系仿真系统的同时需要考虑建立可动态扩展的仿真支持库,用以保证仿真系统的灵活性和适应多系统长期任务能力。以典型任务场景为导向开展仿真支持库开发,在模型库、算法库、规则库建设基础上,采用分层级、模块化的系统文件管理方法,实现各类数据高效存储与调用。仿真支持库总体建设方案如图5所示。
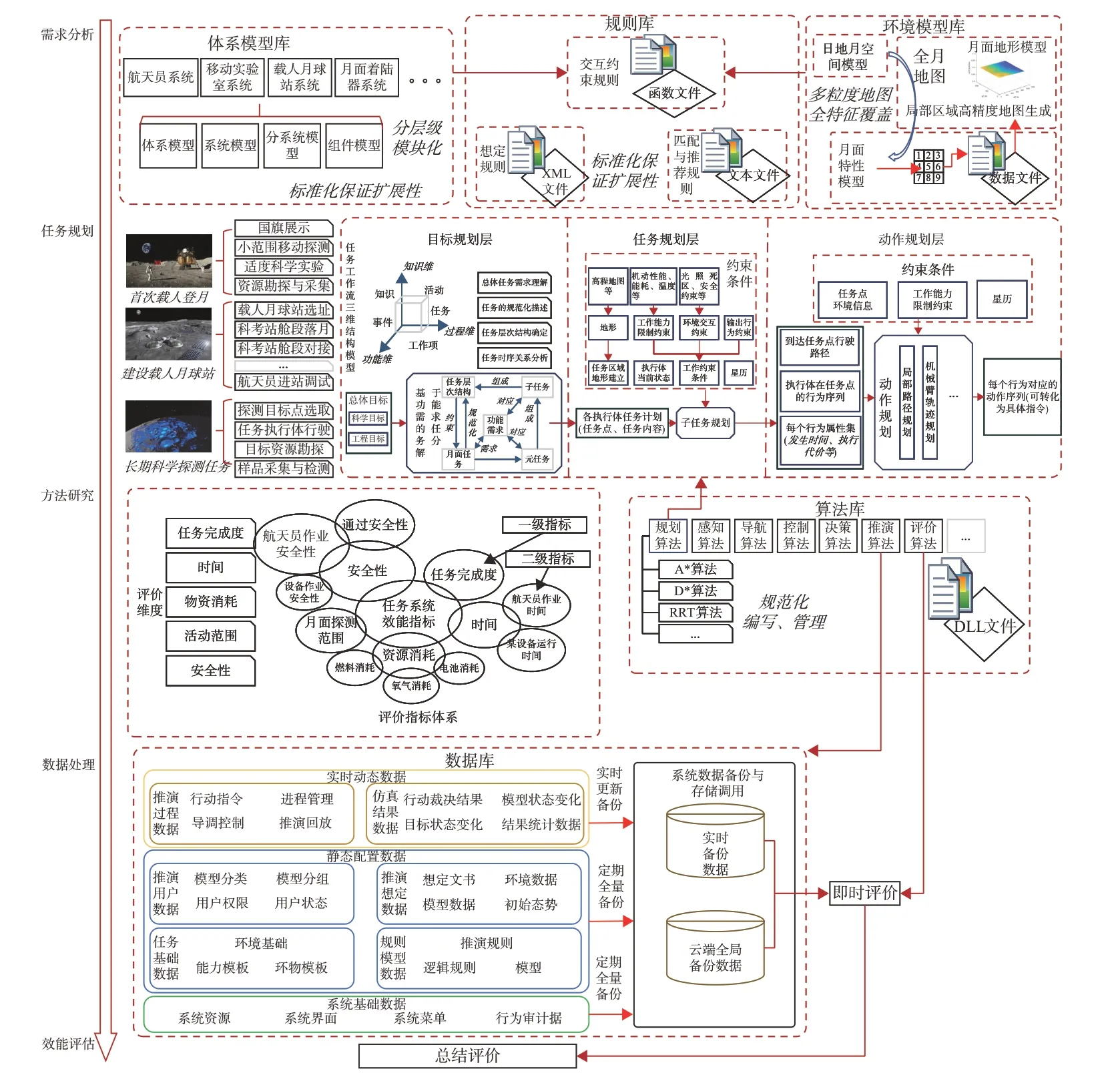
图5 仿真支持库总体建设方案图Fig.5 Construction plan diagram of simulation support library
以模型库为例,简要介绍仿真支持库开发相关方案。对于实体模型库,主要开发着服航天员、新一代载人飞船、月面着陆器、载人月球车等实体三维及数学模型,预留了通用模型模块,后续可通过简单配置实现新模型添加操作。三维模型在原型号设计模型基础上进行精简,以适应视景动态展示响应需求,特别地,为了实现场景交互,对各模型均进行了碰撞检测配置。数学模型除基本的运动学和动力学模拟外,还综合开发了光照、热、能量、信息流等关键参数随推演进程变化模型。
采用“星历+高精度地图+环境数据”耦合作用的方法构建环境模型库。星历模型主要考虑“太阳-月球”以及“地球-月球”2种相对位置关系,作为计算太阳高度角和测控通信可见性的重要依据。由于缺少月表高精度数据源,采用基于已有遥感DEM、DOM 信息的随机地形生成方法产生高精度地形图,其中包括撞击坑等典型特征识别提取和石块多模式分布技术。月球和空间环境数据已有较为成熟的数学模型[18-19],通过代码即可实现相关功能,本研究仅对实体交互期间存在的碰撞、能量传递、物理影响等情况进行特别配置。
基于上述设计,综合考虑了载人月球探测任务具有任务复杂、涌现性强、创新潜力大等情况,该载人月球探测体系仿真系统可实现全部月球探测飞行器系统的高集成度体系仿真推演展示,支持人员自由介入的过程模拟、结果分析和参数预示工作,能够真实模拟系统间、系统与环境间、大系统间交互情况,分析人机工效和任务效能,可以进行大规模扩展和外部系统联动,具有更通用、更体系、更灵活的特点。
3 关键技术方案
3.1 体系建模
载人月球探测体系是一个适应多样任务的动态复杂大系统,它由具有自主特性的各飞行器和航天员实体组成,各实体又具有独立的传感、控制、通信、能源等功能,体系整体规模可以随不同任务目标而改变。针对如此特性,本研究采用多智能体方法对该体系进行建模,即将载人月球探测任务中多个实体集合抽象为一个松散联邦,其中各智能体均具有自治性,通过协调与合作方式实现各智能体之间的互动或对冲突的调整。
该体系(System of systems,SoS)可抽象为由环境E、智能体集合A、对象集合O、关系接R、操作集合P以及算子集合η6种要素组成的开放型网络结构,可形式化定义:
式中:环境E可具象为具有一定特性的地月、月表空间;集合A中的智能体可代表各飞行器、航天员或其他月面设施设备;集合O由环境中智能体需要探索或控制的无生命对象组成,可以被智能体感知、创建和删除;集合R包含所有连接各智能体的关系,包括但不限于互动和冲突;集合P包含了集合A中各实体可感知、创建、删除、修改和控制的集合O中对象;集合η可以表达智能体各种操作和环境反应的数学关系。
用多智能体方法进行载人月球探测体系建模可以利用多智能体系统的分布式、动态性、开放性、有限性和自治受控等特点,精确模拟该体系中各实体自主和多实体间交互的行为。还有一优势在于,所建体系模型可以方便快速地引入智能决策与规划算法,提升整体对未来任务的适应性[20]。图6 为本研究中基于多智能体的体系建模及仿真框架。
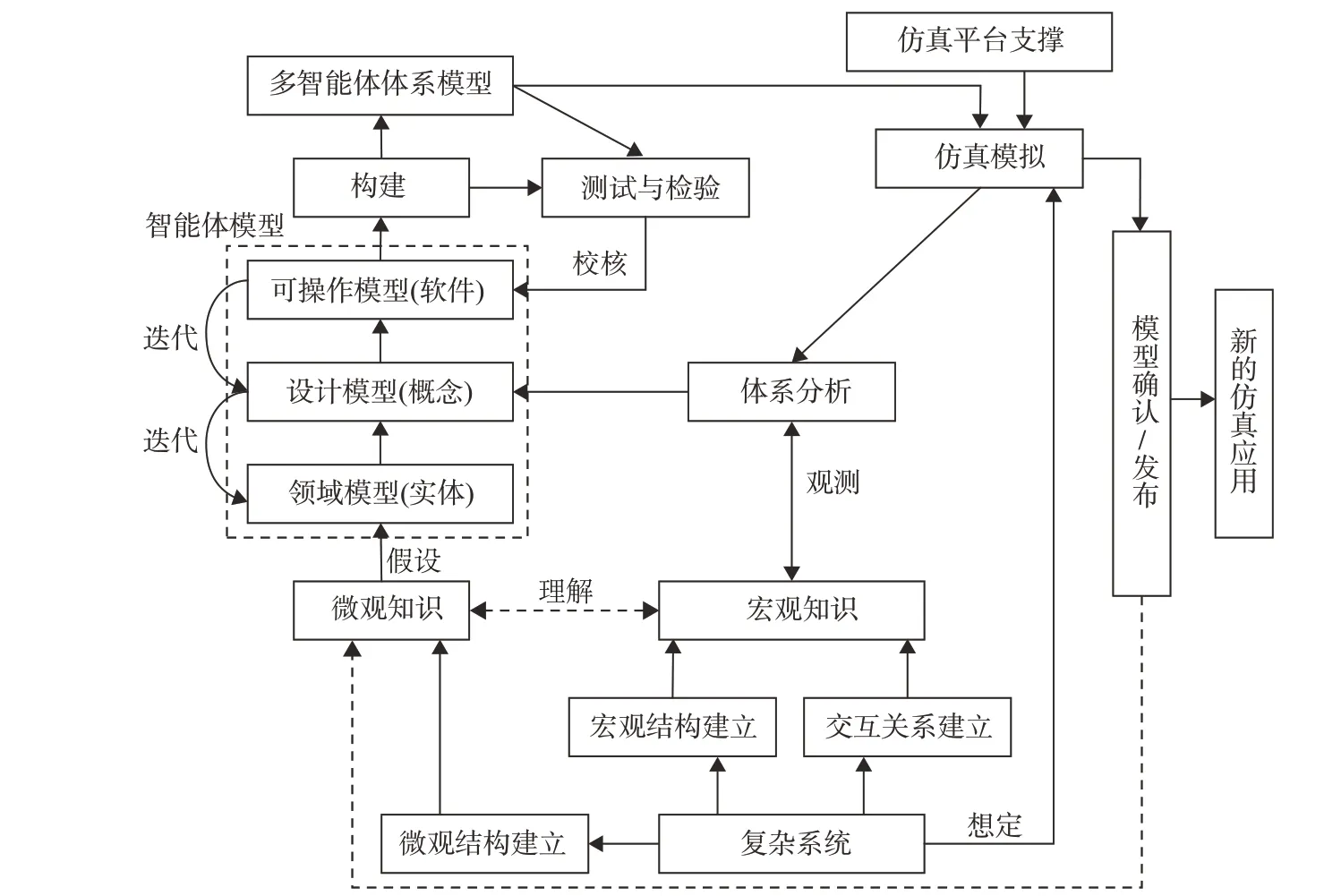
图6 基于多智能体的体系建模及仿真框架Fig.6 System modeling and simulation framework based on multi-agent method
智能体间存在通信、交互、协作等行为,在体系建立和仿真过程中依实际情况开展精细建模,此处不再展开叙述。
3.2 任务规划
载人月球探测任务规划实质是一个资源受限情况下的复杂系统组合优化与调度问题。为更好地实现相关活动任务规划,本研究采用分层递阶的规划思路,自上而下逐步分解各项任务,形成“目标—任务—动作”3 层任务规划结构[22],采取基于“功能—需求”二元关系的任务分解方法,实现对复杂任务的具体规划,其架构如图7所示。
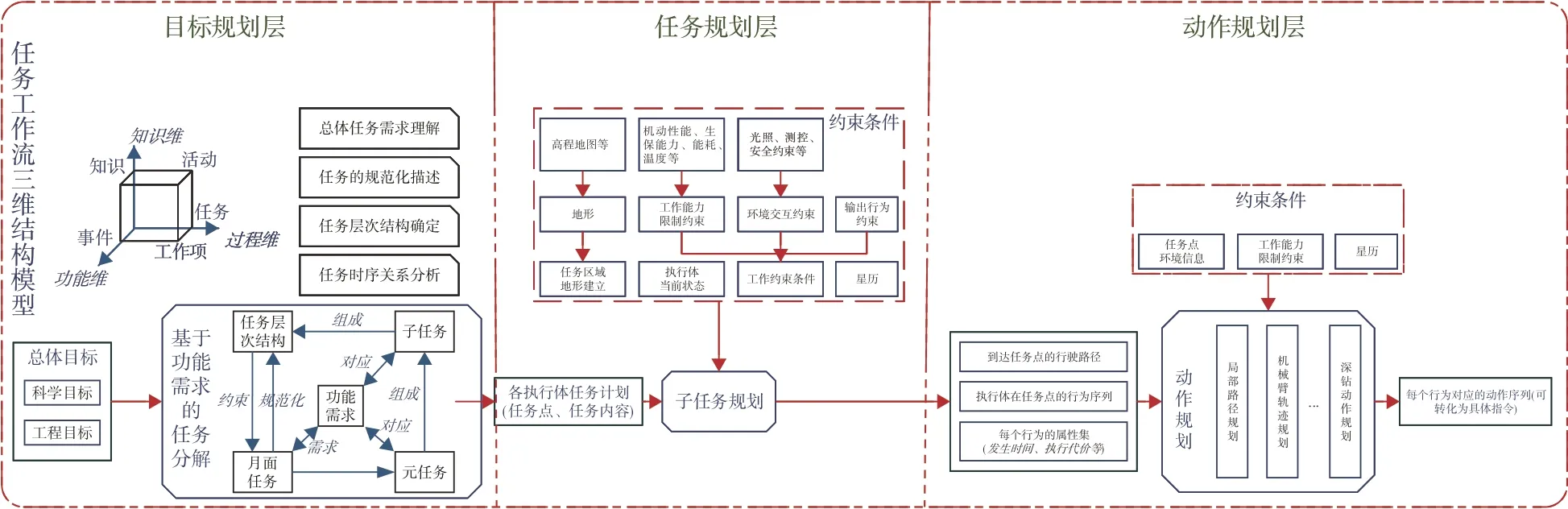
图7 分层递阶式任务规划结构Fig.7 Hierarchical and hierarchical task planning architecture
在目标层面,针对载人月球探测多系统协同作业问题,建立相应规划模型。考虑到月球探测系统的异构性,不同任务需要的系统或系统组合不同,首先建立载人月球探测任务体系,将各类任务做层次化分解与标准化描述,从而构建月球探测系统功能与任务需求之间的二元对应关系。基于缺陷修复式规划的思想,将未安排时间的任务和任务未被满足的系统需求视作待修复缺陷,将每一轮规划分解为任务选择、系统选择和活动安排3个阶段,并在缺陷修复过程中加入优化机制。在此基础上,将各系统完成不同任务的时间代价抽象成任务时间地图,基于此图求解执行任务的时间代价[23]。设计时间代价启发式搜索策略,从缩短任务用时的角度,获取月球探测系统的调用与组合,并优化任务执行顺序。通过上述方法,在目标规划层将月球探测任务总体目标转化为每个探测系统的任务序列,最终形成优化的完整任务方案。在任务层面,本研究采用基于状态转移图的启发式任务规划方法[24]。针对多系统并行操作及耦合交互的特点,考虑系统多约束及复杂状态切换特性,建立状态转移图描述各系统状态转移路径方案,设计状态转移代价函数。在转移图的基础上给出规划节点启发式评估策略,对问题搜索空间进行削减,减少无效迭代、快速获得规划结果。
在动作层面,主要是各月球探测系统上的活动部件(如机械臂)完成一个具体的行为(如拾取样品)的规划。各类活动部件以及行为均有对应的成熟算法,直接调用即可,此处不再详述。
3.3 推演展示
在载人月球探测相关方案论证和设计过程中,应用可视化功能对任务过程进行推演展示,可以让用户更直观地了解设计细节和任务流程,配合键鼠和模拟器等交互设备,可以实现对场景实体的直接操作和体验,有利于快速推演方案结果和暴露设计缺陷。为载人月球探测体系仿真系统设计推演展示相关功能,可以极大程度弥补月球探测任务无法实地验证的缺陷,未来还可与在轨航天器联动,实现数字孪生用以支撑飞控任务。
载人月球探测体系仿真系统的推演展示功能由场景建设加载、月面环境仿真、操作交互仿真、驾驶交互仿真、机器人作业交互仿真、任务状态监控、事后评估分析、辅助功能以及内外部系统接口等模块组成。利用Unity3D 软件,以地形数据、各类实体模型、时间、通讯等条件为基本对象,对其作综合处理,创建交互式的三维场景,能够达到所见即所得。仿真过程中引入数学模型计算的实时数据对三维可视化场景进行驱动,每个模型的物理属性、资源约束参数、运动性能、操作模式都将反映在场景中各实体模型的物理运动状态、性能损耗状态上,实现任务活动推演数据驱动仿真。
由于当前掌握月球地形数据精度难以达到实体交互要求,本研究基于前文模型库建设中提到的随机地形生成方法提升场景模拟中的地形精度,从而实现仿真实体与月面地形交互。首先对已有DEM 数据进行插值,开展缺值估计和离散点数据网格化。然后根据统计分布规律和已有DOM 中识别属性参数,对月面撞击坑和石块分布进行模拟,再根据其影响区域修正附近数字高程信息。最后再随机增加小石块分布等细节信息。生成的典型地形高程图如图8所示。后续加载到场景中进行渲染和碰撞检测部署修正。
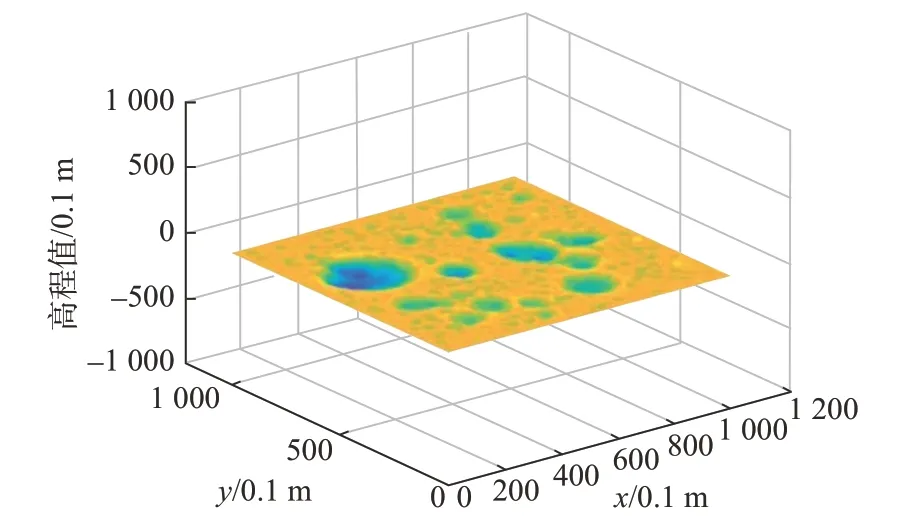
图8 典型地形高程图生成示例Fig.8 Example of generating typical terrain elevation map
由于载人月球探测相关任务周期较长,为了快速推演各次任务结果,本研究使用了一种基于并行计算的仿真加速方法,能够实现10倍超实时仿真推演。传统超实时仿真多采用“跳时”方法,即增大仿真时间粒度,此方法将牺牲数据计算精度。本研究利用混合云架构中“虚拟容器”的概念,将仿真过程中的计算负载根据物理逻辑分配到多个虚拟容器(节点计算机)中,在不简化计算模型、不增大数据计算误差的情况下提升整体运算速度,从而实现对任务场景的超实时推演。特别地,由于展示场景无需体现“仿真加速”过程,本研究中仅对数据运算做超实时处理,场景仍根据数据驱动逐帧渲染。
3.4 效能评估
随着航天技术的不断发展,载人月球探测体系的特征要素将大量增加,具体表现为:要求系统与系统之间、载荷与新增设备之间可以实现功能互补和能量、信息连通,以求达到整体效能最佳,在保持系统独立性的同时发展群体涌现性。在方案设计和任务实施阶段,需要对体系中各系统效能进行评估,从全局角度优化配置。
本研究遵循效能评估的基本步骤,针对已设计的系统构建效能评估指标体系,根据各次仿真推演结果采用不同方法计算效能指标,由各效能指标综合计算出整体评估值,对多个方案的整体评估值进行比较,实现方案择优。
综合考虑任务约束、任务实体系统、任务环境、评估维度等信息,建立多层级“任务目标-执行过程”对应关系,以此建立载人月球探测任务评估指标体系。以载人登月任务为例,可以拆解为科普展示、样品采集、资源探测、科学实验等子任务,科学探测任务进一步可分解为实验设备布设、展开实验、数据收集等元任务。将任务目标、任务约束、有关实体、所在环境按照这样粒度由低到高拆解到每个子任务、每个元任务,并且按照评估维度列举出评估指标,形成如图9所示评估初步指标体系。
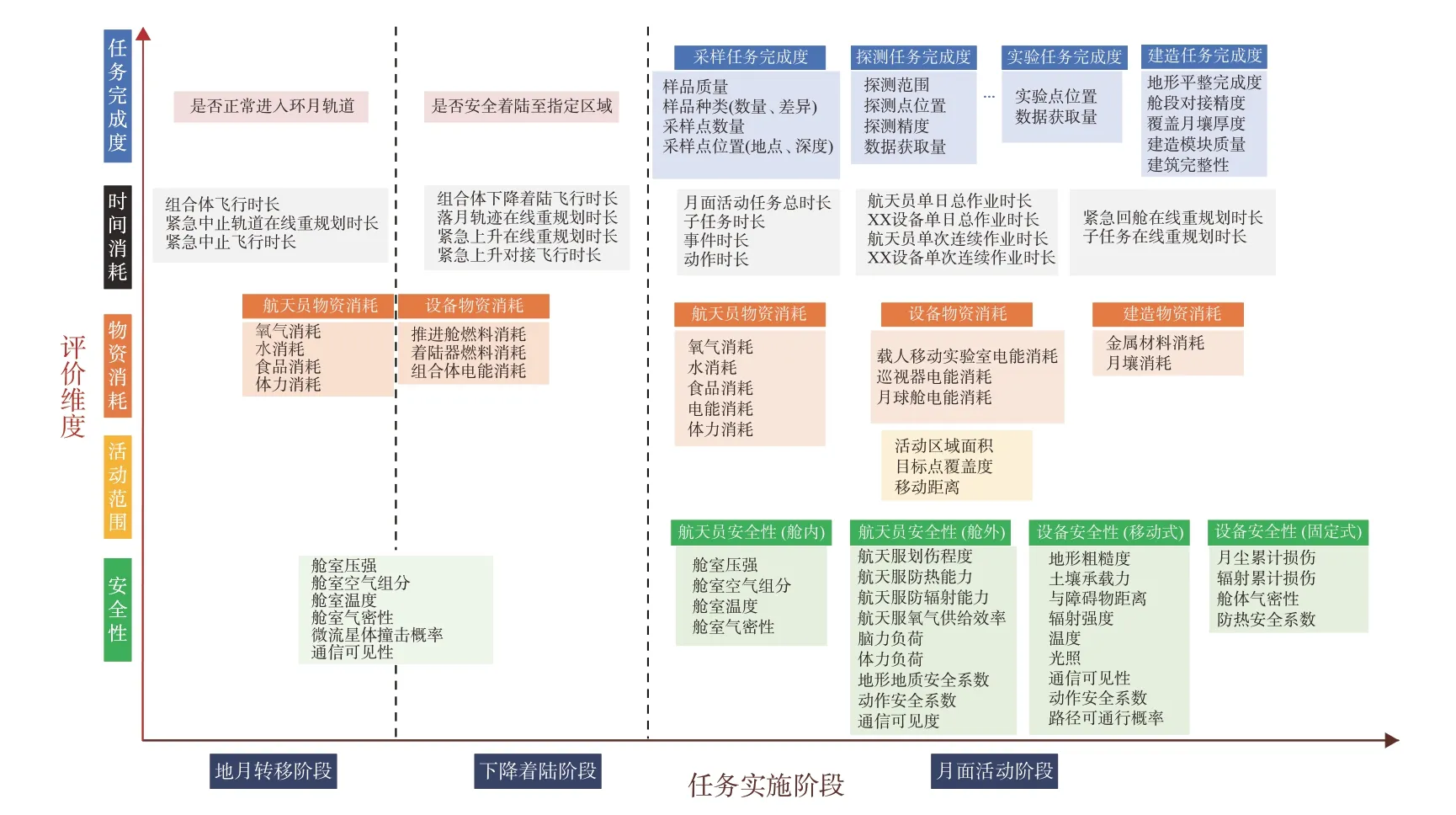
图9 登月案例初步指标体系Fig.9 Preliminary parameters system for lunar landing case
由于当前对载人月球探测存在认知局限性和信息不完备等约束,导致其效能评估过程中存在大量不确定因素。为解决此问题,本研究采用探索性分析技术开展体系效能仿真评估[21],分别进行系统级探索与体系级探索,用系统级探索结论引导后续评估。在系统级探索中,主要对象是各航天器的数学模型,探索过程即是仿真推演过程,对仿真结果进行初步评价打分。在体系级探索中,主要对象是评估模型,将任务场景中所有涉及的体系要素打分进行多轮拟合,利用逼近分析的方法将各次拟合结果与系统级探索结合,最终形成整体评估结果。
3.5 系统联动与扩展
载人月球探测体系是动态复杂大系统,体系中包括但不限于已有的各类型航天器、航天员、科学载荷和地面支持等系统,这些系统在发展过程中均已开发了大量软件系统和物理服务器等基础资产,为其提供稳定的研究环境和支持保障。为降低开发成本和提高资源整合效率,体系仿真系统采用混合云架构,在不对上述系统进行大幅更改的基础上,支持多系统联动和融合。随着任务的拓展,未来研发各类新型航天器、机器人等系统的仿真系统,也可在该架构上直接扩展,从而减少相关开发代价。本研究采用混合云架构如图10所示。
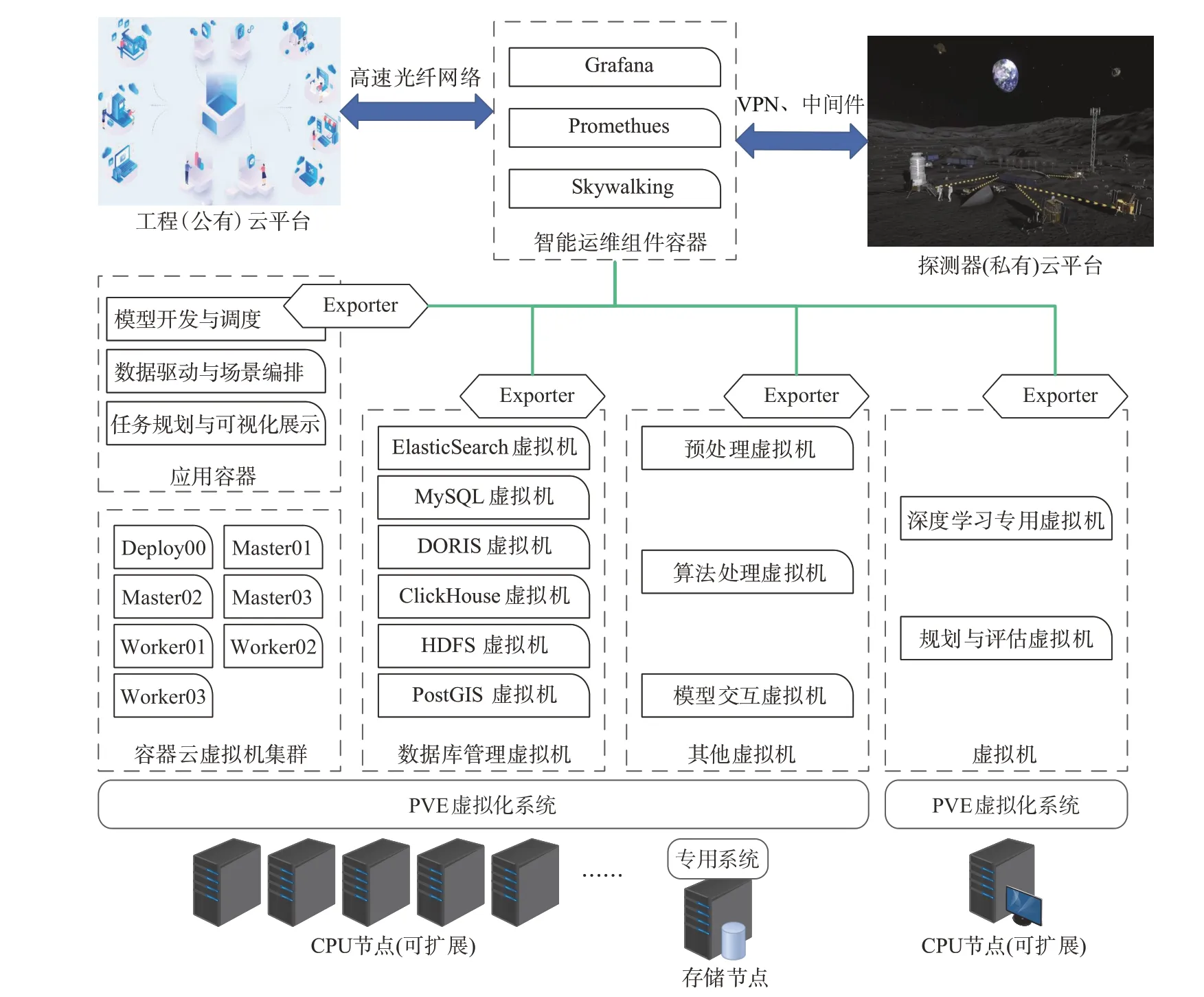
图10 混合云架构示意图Fig.10 Schematic diagram of hybrid cloud architecture
参考第2 节总体方案,载人月球探测体系仿真系统建设初期,仿真平台和仿真支持库的基础功能开发工作在私有云环境中进行。随着任务不断深入,体系仿真系统规模逐渐增大,将通过VPN或光纤专线的方式与工程云、其他私有云进行组网,实现专业数据的融合使用。由于无法直接访问各云端存储设备,体系仿真系统采用快照和镜像的方式打通数据存储连接,即利用虚拟容器直接实现批量数据迁移。由此也可以实现自定义虚拟云,自由组合成更高效的仿真网络,并让数据可以在各地之间共享。
考虑到早期已开发的各软件系统与当前体系仿真系统基础架构和运行模式不一致,难以用统一的执行逻辑开展操作,体系仿真系统设计了虚拟化主机机制。在本地创建虚拟化主机,配置相关网络、存储空间、运算资源等信息,可以将旧的软件直接部署或映射到混合云架构的仿真平台中,实现数据的平滑转移和功能的无缝结合。由于该系统采用模块化设计,制订了相关标准及接口规范,可对其主要功能模块以插件和调用方式进行升级和扩展。
权限管理是云技术应用安全的核心功能,本研究开发了专用的全局控制器,并为其设置独立的授权运算逻辑,可实现账号管理、角色定义、资源配置及功能操作等权限管理。为了能根据用户需求进行最优的计算资源分配,本研究采用分层调度策略:顶层对整个混合云网络进行集群调度,根据各应用的目标(例如轨道计算)将计算负载分配至专用系统中;底层对体系仿真系统私有云的硬件进行调度,根据整体任务需求(例如效能评估)为应用分配CPU、内存等直接计算资源。
4 典型案例仿真
以航天员在月面出舱活动为例,应用载人月球探测体系仿真系统对月面活动场景进行仿真推演,主要应用流程如图11 所示。本案例中涉及的体系要素包括月面着陆器、航天员、载人月球车、科学设备等。
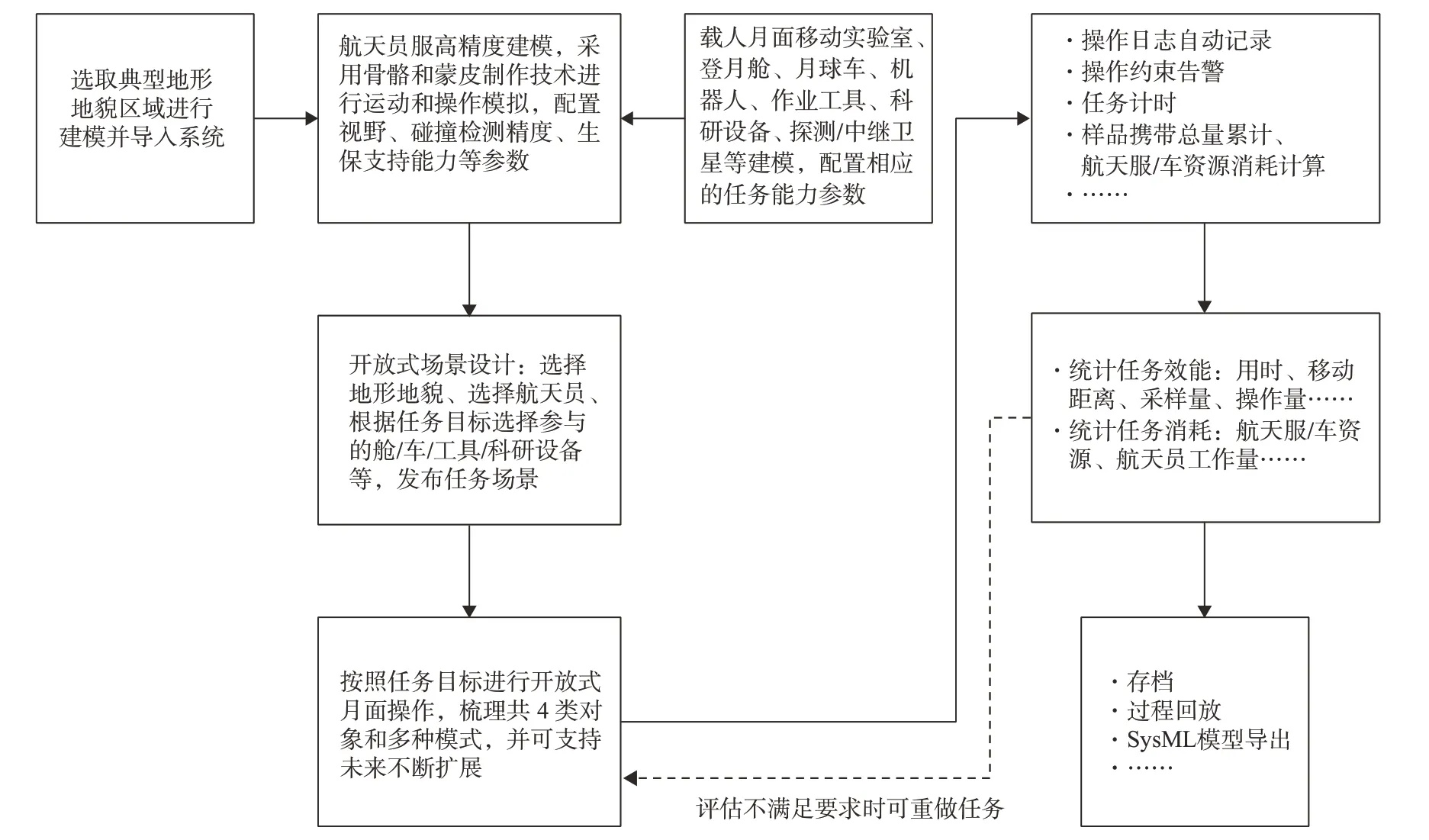
图11 月面活动仿真流程简图Fig.11 Simulation flowchart of lunar EVA
在任务仿真设置初期,利用仿真平台进行模型导入和场景编辑工作。仿真平台中直接为任务场景中各实体模型配置物理特征、运动机构、视场、通信链路和操作模式等特性;在场景编辑工具中进行地形导入加载、仿真时间设定、模型交互约束、活动计划配置等操作,支持从场景列表中选择场景进行加载,也可在场景管理列表中新增场景、对已有场景进行编辑、删除、查看操作回放等操作。
仿真启动运行后,系统针对受控任务场景提供视角切换功能,支持切换到航天员视角、自由视角或自定义的预置视角。在模拟推演过程中,可通过鼠标、键盘按键等输入设备对航天员进行多种行为(行走、搬运、使用工具、部署设备等)控制,同时提供一系列告警机制,包括活动中的通信、碰撞、生保等方面的告警。在模拟航天员驾驶月球车过程中,可通过键盘按键交互实现对月球车实体的加速、刹车控制,增加应用效果真实性。仿真场景示意如图12所示。

图12 仿真场景示意图Fig.12 Schematic diagram of simulation scenario

图13 结果分析报表Fig.13 Result Analysis Report
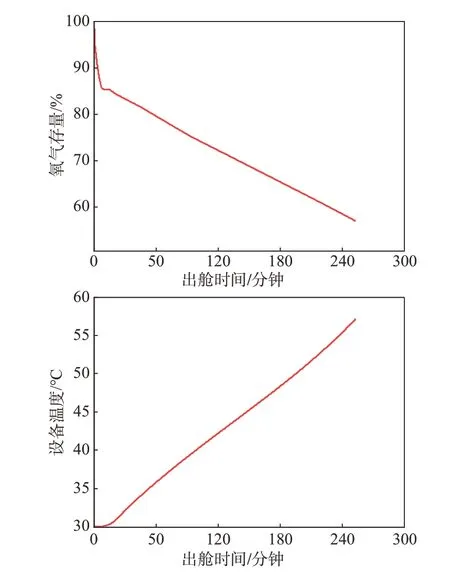
图14 氧气存量和储能设备温度随出舱时间变化曲线Fig.14 Curves of oxygen stock and temperature of energy storage equipment as a function of departure time
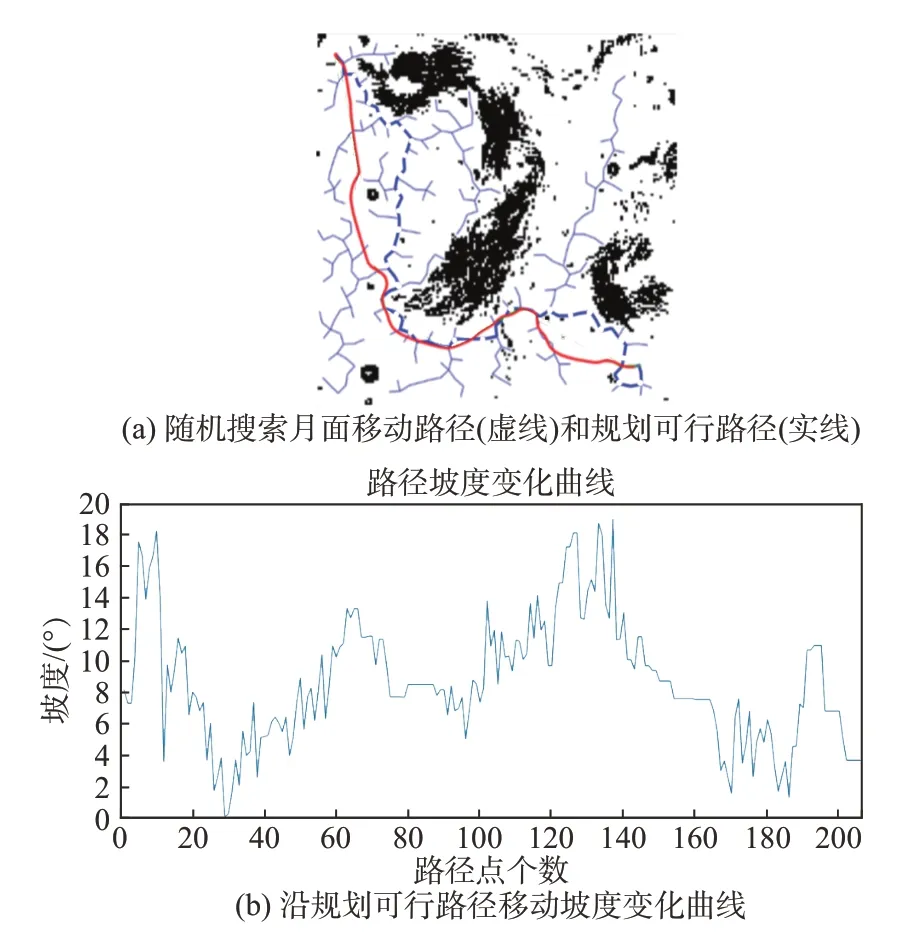
图15 月面移动路径仿真结果Fig.15 Simulation results of lunar surface movement path
仿真平台中任务流程与SysML 建模工具联动:由SysML 建模工具进行初步的任务流程设计后,通过XMI 标准进行文件生成、导入到仿真平台中;仿真系统识别初步活动计划内容后,与活动任务场景进行绑定,用户利用仿真系统操作航天员、机器人等实体对象交互完成既定任务目标,并多次迭代演练;仿真系统根据任务完成度、活动时长、活动范围、安全性、资源消耗代价等评价维度选择优化后的详细活动方案,通过XMI 标准进行文件生成,回导到SysML建模工具进行下一阶段的系统设计。
在场景任务活动执行过程中,系统时间按照预设的时间格式进行显示,为用户在月面活动提供导航辅助,让用户操作过程中能感知到时间、空间的变化。同时系统对用户执行活动计划全流程进行监控,对航天员、月球车、机器人、设备等重要实体的状态进行监控和告警。针对个别拍摄类任务执行过程中,动态设置相机小窗口辅助显示和仪表盘实现任务执行的告警机制,提高体验和真实感。
执行任务推演过程中,每次操作完任务记录都将保存提交数据库,期间系统自动记录用户的所有操作并存为日志记录,并对各类活动用时、资源消耗、操作任务效能指标、告警情况等方面统计,为用户对月面活动任务评估分析提供数据支撑。一次任务结束后,仿真平台将对各项特征参数自动生成结果分析报表,还可对多个感兴趣参数绘制全过程变化曲线。
经与单机仿真实验对比,采用本文设计的混合云架构开展体系仿真可缩短37%的仿真周期,且场景中同时交互实体数量由8 个可增加至27 个。在未来硬件扩展后还将进一步提升性能,大幅提高设计及验证工作效率。
因底层支撑平台和各项功能开发均由本项目组独立完成,实现了国产化载人月球探测体系仿真全链条、全周期、全流程完全自主可控,可为航天数字化转型和航天强国建设提供强有力支撑。
5 结论
本研究设计并开发了一套基于混合云架构的载人月球探测体系仿真系统,将体系建模、任务规划、方案推演、效能评估和场景展示等多种任务应用集成在同一环境中,可对复杂系统和关键参数进行全面仿真验证。该系统具有较强扩展性,相关技术方案也可用于其他领域体系仿真系统设计中,具有广泛应用前景。针对该系统未来发展,提出以下思考和建议。
当前体系仿真系统的主要任务是辅助设计工作,未来要更多发挥混合云架构优势,面向所有新研型号和设备进行系统扩展,引入工程云、月球探测私有云和其他数字化仿真系统。将航天器、航天员和科学载荷系统的具体仿真任务派发给各专业仿真系统完成,在减轻运算负担的同时,提升整体模拟仿真精度。
载人月球探测体系仿真系统发展建设终极目标是支撑相关工程任务实施,建设与工程指控系统联网互动能力,为在轨航天器提供参数预示和数字孪生。为此,体系仿真系统应通过半实物仿真、模拟器应用等手段逐步校准模型精度并提升实时响应能力,待成熟后建设专线网络,实现天地同步运行。
本文所述仿真系统技术具有通用性和拓展性,通过不断增加和完善各功能模块,未来可进一步应用在载人火星探测、载人星际探测等远期任务体系中,为相关航天器和载荷系统论证及设计提供参考,助力实现“降本增效”高质量发展的目标。
猜你喜欢
军事文摘(2022年12期)2022-07-13
少儿科学周刊·少年版(2022年19期)2022-05-30
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
新世纪智能(数学备考)(2020年11期)2021-01-04
太空探索(2016年12期)2016-07-18
太空探索(2016年9期)2016-07-12
太空探索(2016年6期)2016-07-10
新高考·高一物理(2014年1期)2014-09-18
中国火炬(2010年7期)2010-07-25