空间站机械臂人机系统设计与验证
2024-03-17 04:28薛书骐胡成威王春慧吴志红李德伦谭丽芬
宇航学报 2024年1期
朱 超,薛书骐,胡成威,王春慧,吴志红,李德伦,谭丽芬
(1.北京空间飞行器总体设计部空间智能机器人系统技术与应用北京市重点实验室,北京 100094;2.中国航天员科研与训练中心人因工程全国重点实验室,北京 100094)
0 引言
空间站机械臂人机协同作业是一项高风险、高成本、高难度任务,涉及空间站、货船、飞船、机械臂、航天员、航天服、通信、地面指挥及支持等各大系统,需要舱内航天员、舱外航天员、地面人员等多方协同配合才能完成。
在人机协同作业过程中,由地面或舱内航天员操控机械臂并监视运动状态,舱外航天员负责具体设备的安装拆卸等操作,地面人员提供操作支持并进行风险预测。由于舱外作业过程复杂、协作方多、约束条件多,作业过程中航天员或航天器非常容易出现安全风险。因此,研究空间站机械臂人机系统设计对航天员出舱任务、舱内外人机协同作业具有非常重要的意义。
本文首先对国际空间站机械臂人机系统的研究现状进行了调研,然后对天宫空间站的人机系统设计体系进行了系统介绍,最后,按照人机系统的设计流程,从管理、设计、验证三个方面开展研究,空间站机械臂人机系统设计填补了国内空间站大型机械臂人机系统的空白,后续可作为空间站机械臂人机系统设计工作的参考。
1 国际空间机械臂人机系统组成
国际空间站布置有两个机器人工作站,可分别控制SSRMS(Space station remote manipulator system)机械臂支持相关任务。SSRMS 人机系统[1]包括3 个提供操作视频的显示器,1 个提供图形和数字信息的指挥和控制显示器,一些由跟踪球输入启动的软键,2个用于输入手动操作命令的手动控制器和1个键盘。手动控制器由2 个操纵杆完成,分别控制旋转和平移。
实验舱远程机械臂系统JEMRMS(Japanese experiment module remote manipulator system)人机系统[2]主要由1 个管理数据处理器(MDP)、1 个机械臂控制单元(ACU)、2 个电视监视器(TVM)、1 个平移手控制器(THC)、1 个旋转手控制器(RHC)、1 个RMS 笔记本电脑(RLT)等组成。MDP 是控制JEMRMS模式和收集遥测数据的主计算机。ACU接收手控制器的信号,计算手臂轨迹和逆运动学,并向关节发送角度命令。RLT 在图形用户界面(GUI)上显示遥测信息。
欧洲机械臂ERA主要由1套舱内人机交互设备IMMI、1 套舱外人机交互设备EMMI、1 套中央控制计算机CPC、1套支撑设施和工具库等组成[3]。ERA机械臂人机系统包括舱内人机交互设备IMMI 和舱外人机交互设备EMMI 两部分。EVA-MMI 是一种便携式智能终端,配有一根电缆,可插入任何ERA基点,以便对机械臂实时监测。IVA-MMI 在空间站内部提供了相同的功能,增加了图形叠加和3D视图等功能。
通过对国际空间站3种机械臂人机系统进行对比分析,其主要配套设备为控制器和显示器。控制器主要供航天员通过平动和旋转手柄、或者软按键控制机械臂运动,显示器主要用于显示机械臂参数以及反馈视频图像供航天员进行监视和综合判断。舱内航天员通过操作控制器对舱外的机械臂进行不同模式的运动控制,相关参数可实时反馈到显示器上供航天员进行决策。
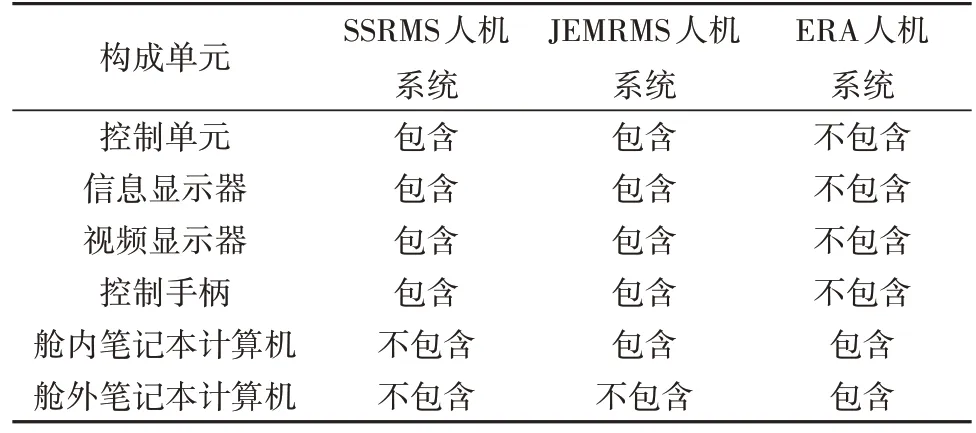
表1 国际空间站机械臂人机系统构成对比Table 1 Comparison of human-robot systems on the ISS
2 中国空间站机械臂人机系统体系设计
中国空间站机械臂采用7 自由度对称构型,如图1 所示,主要由7 个关节、2 个末端执行器、2 根臂杆、1个中央控制器、1套视觉监视与测量设备以及1套压紧装置等组成。其中,关节采用3个肩部关节、1个肘部关节、3个腕部关节配置方案。
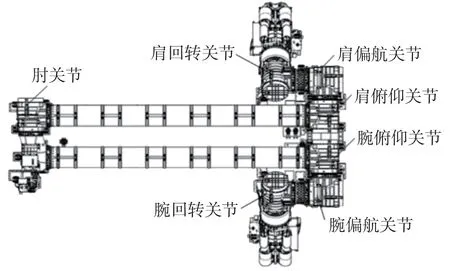
图1 中国空间站机械臂组成Fig.1 Composition of the manipulator on the China Space Station
空间机械臂人机系统设计体系,如图2所示,主要包括人机系统管理、人机系统设计、人机系统验证3个方面。人机系统管理梳理人机要素并开展项目规划和功能分配,形成人机系统设计要求。人机系统设计是将人机要求转化为人机系统设计的过程,包括人机系统构成设计、人机回路设计、操作台设计、人机信息显示设计和人机安全性设计[4-7]。其中,人机系统构成及回路设计主要指舱内人机和舱外人机,以及形成的显控回路设计;操作台设计主要指控制器、操作面板、操作手柄等设计;人机信息显示设计包括参数信息、二维图像信息、三维图像信息等设计;人机安全性设计主要包括机械臂自身安全性、碰撞检测预警安全、地面仿真与监视等设计。最后人机系统通过规划的仿真分析、显控回路验证、在轨验证等三个方面开展验证,是检验整个系统是否达到规定的人机要求,保障任务成功。
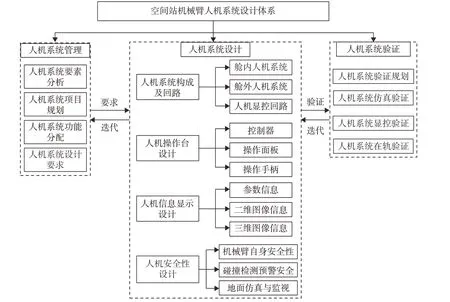
图2 空间站机械臂人机系统设计体系Fig.2 Design of human-robot system of space station manipulator
3 空间站机械臂人机系统管理
3.1 人机系统要素分析
对机械臂人机协同操作全周期的要素,比如空间站/货船/飞船等飞行姿态、机械臂运动规划、舱外工具使用状态、航天员与航天服配合操作、通信链路、地面指挥等协同要素的逐一分析和详细梳理,必须贯穿整个设计过程始终,才能将航天员的安全风险降到最低,保证任务顺利完成。
根据航天员参与的不同任务类型,需要对人机系统要素进行梳理分析。比如,航天员只在舱内对机械臂进行控制,人机系统要素只需要考虑机械臂与空间站之间的相对姿态、通信,以及相关载荷的状态。若航天员进行舱外活动,人机系统要素需要将空间站、机械臂、舱内航天员、舱外航天员、航天服、操作工具、操作载荷、地面通信设备等因素进行详细考虑。
3.2 人机系统项目规划
根据任务和操作难度不同,空间站机械臂人机协同作业分为5种类型[8-10]:
1)舱内航天员监视机械臂运动,不操作控制,舱外无人;
2)地面控制机械臂运动,舱内航天员监视机械臂运动,舱外1名航天员站于机械臂末端;
3)舱内航天员控制机械臂运动,舱外无人;
4)舱内航天员控制机械臂运动,舱外1 名航天员站于机械臂末端;
5)舱内航天员控制机械臂运动,舱外2 名航天员分别站于机械臂末端和舱壁。
3.3 人机系统功能分配
空间站机械臂人机协同作业的目标是保证航天员安全的前提下系统高效的完成既定任务。以支持航天员出舱活动为例,在人机协同作业过程中,需要结合舱内航天员、舱外航天员、地面人员的各自优势,在任务分不同时段对人机功能进行动态分配。
正常工况下人机功能分配按如下原则进行:在预设的正常运动过程由地面控制机械臂运动,将舱外航天员运送至指定操作位置,舱内航天员进行监视;在出舱口操作或作业点操作需要微调机械臂时,转换为舱内航天员根据舱外航天员口令控制机械臂运动,地面人员监视机械臂状态及其周边环境。
异常工况下人机功能分配按如下原则进行:在机械臂运动过程中舱外航天员出现身体不适或者各方发现有碰撞风险时,舱外航天员可以自行或者通知舱内进行机械臂紧急制动。机械臂停止后航天员及时通报,地面决策开展后续的故障处置工作。
3.4 人机系统设计要求
人机系统设计要求主要包括舱内和舱外设计要求两部分。
舱外部分人机系统设计要求主要涉及航天员紧急对机械臂进行制动、沿着机械臂扶手爬行、站在机械臂末端作业、机械臂稳定运动、机械臂照明需求等5个方面[11-12]。
1)为了保证舱外航天员安全,舱外机械臂末端安装紧急制动,可随时按下停止机械臂;
2)当遇到机械臂出现故障后,航天员可沿着机械臂扶手爬行返回,扶手间距需满足爬行要求;
3)机械臂末端需配套设备,保证航天员在舱外作业时姿态稳定,无大幅度晃动;
4)机械臂运动过程中,速度不应过高,保证航天员身体不会出现不适;
5)航天员舱外作业时,若无太阳光光照条件,需要机械臂提供一定的光照支持。
舱内部分人机系统设计要求,主要包括舱内设备布局、显控回路、控制器、信息显示、操控安全性等。
1)舱内航天员进行操控时,舱内设备布局应满足操作的可达范围和舒适空间;
2)舱内航天员操控时,显控回路时延满足小于1秒条件;
3)舱内控制器要求透明化,并保证操作认知与机械臂运动一致;
4)信息显示包括参数信息和图像信息,要求筛选出重要参数和相机图像供舱内航天员监视;
5)机械臂过程中,应具备防误操作装置,并配备不同层次的安全保障措施。
4 空间站机械臂人机系统设计
4.1 人机系统构成
根据国际空间站机械臂人机系统调研结果,并对中国空间站机械臂人机协同作业过程进行分析,其需求主要包括:舱内航天员通过人机系统操控机械臂,并与舱外机械臂上航天员、舱壁上航天员、地面支持人员进行实时沟通,共同完成安装舱外设施、上下机械臂、转移至作业点、作业点调整及操作等多个出舱活动环节。因此,机械臂人机系统设计的好坏,直接决定着航天员的生命安全,也影响整个任务的成败。空间站机械臂人机系统协同工作体系图如图3所示。
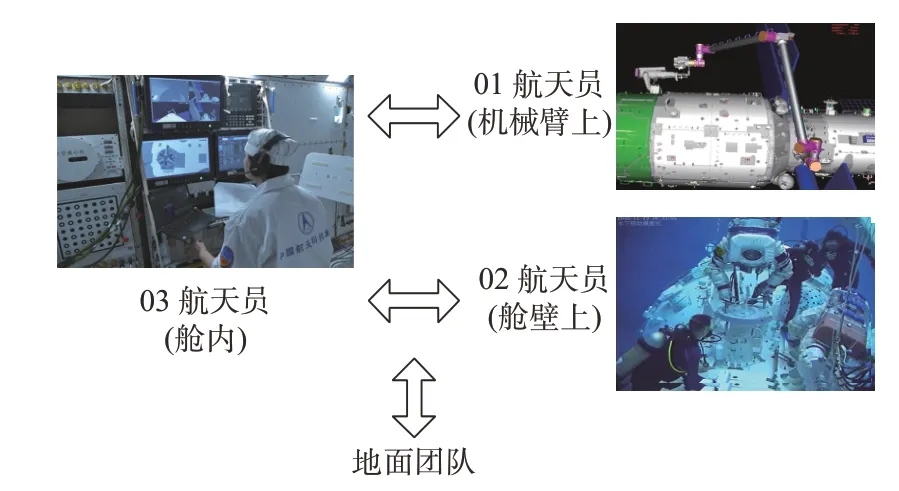
图3 空间站机械臂人机系统协同工作体系图Fig.3 Human-robot system collaborative work system of space station manipulator
空间站机械臂人机系统包括舱内和舱外两部分构成,如图4 所示。舱内部分主要为控制、监视、辅助等设施,包括1个操作台(集成触屏控制器和平动手柄、转动手柄等功能)、4个智能显示器(其中1个用于参数显示,2 个用于舱外真实图像显示,1 个用于三维虚拟模型显示)、2个辅助设备(其中1个电子手册,1 个身体限位装置)和1 套环境设备。舱外部分主要为支持和异常情况控制设备,包括1 个紧急制动装置、1 套机械臂扶手、1 套末端设备和1 套成像照明设备等[13-17]。
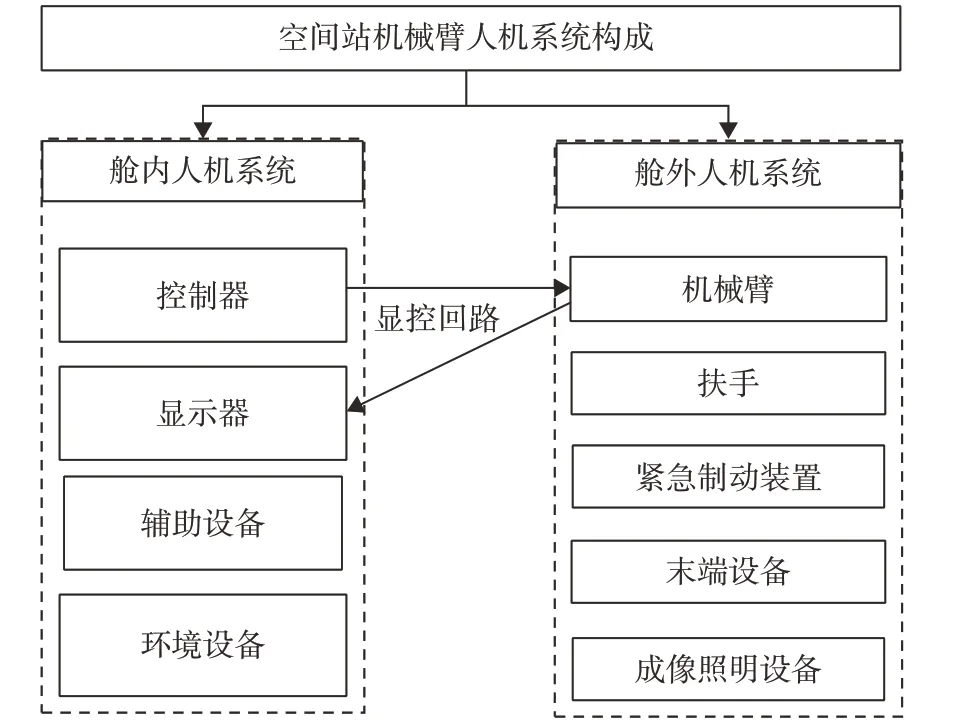
图4 空间站机械臂人机系统构成Fig.4 Human-robot system compositon of space station manipulator
4.2 显控回路设计
舱内航天员通过操作台的面板和平动/转动手柄经过专用总线控制机械臂实现精细运动,运动后的遥测数据和舱外的图像通过测控交换机上传至三个智能显示器上进行显示,同时驱动三维模型进行实时仿真运动,供舱内航天员进行综合判断;站在机械臂末端的舱外航天员利用不同的辅助工具和舱内航天员交互沟通,在不同的作业点完成对目标的精细操作;而地面不仅提供操作指挥支持,而且可以进行全景相机切换、碰撞风险预测、轨道监测等操作,保证整个活动的顺利进行。
4.3 操作台设计
操作台是机械臂的人机交互界面,航天员在操作台上可以控制机械臂运动。航天员操作机械臂主要通过操作台的操作面板、操作手柄配合实现,其中操作面板含硬按键和可触摸电容屏。其中操作面板分8 个区设计:报警灯窗区、操作方式选择区、操作对象选择区、末端操作区、手柄辅助操作区、数字键区、紧急操作区和液晶屏快捷键区。
4.4 人机信息显示设计
机械臂信息显示包括参数信息、二维真实图像信息、三维虚拟图像信息显示。其中参数信息和二维真实图像信息均在智能显示器上显示,如图6 所示。左上角智能显示器用于四分屏显示机械臂操作过程舱外摄像机拍摄的图像;左下角智能显示器用于大屏显示具体细节图像,供航天员操作过程的精确观察;右下角智能显示器用于提供航天员机械臂运行状态的参数显示,包括整臂状态、关节状态、末端状态三部分。
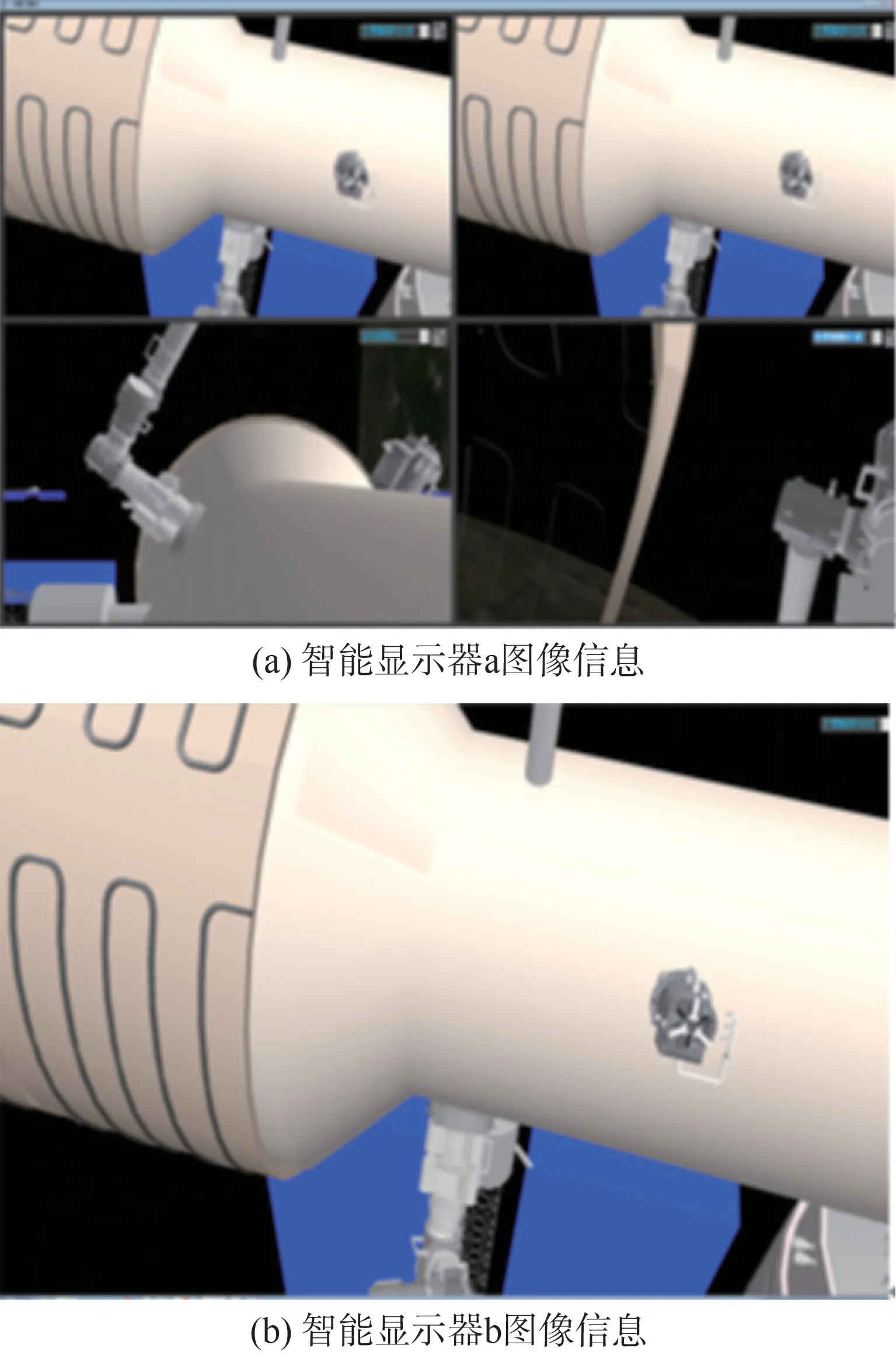
图6 空间站机械臂参数和二维图像信息显示布局图Fig.6 The display layout diagram of parameter and 2D image information for space station manipulator
三维虚拟图像信息在单独的笔记本电脑上显示,笔记本实时接收机械臂遥测参数,驱动当前三维场景进行实时仿真,供航天员操控时清楚识别航天器状态、机械臂运动状态、舱外相机状态,最终构建整个作业场景的认知图像,如图7所示。
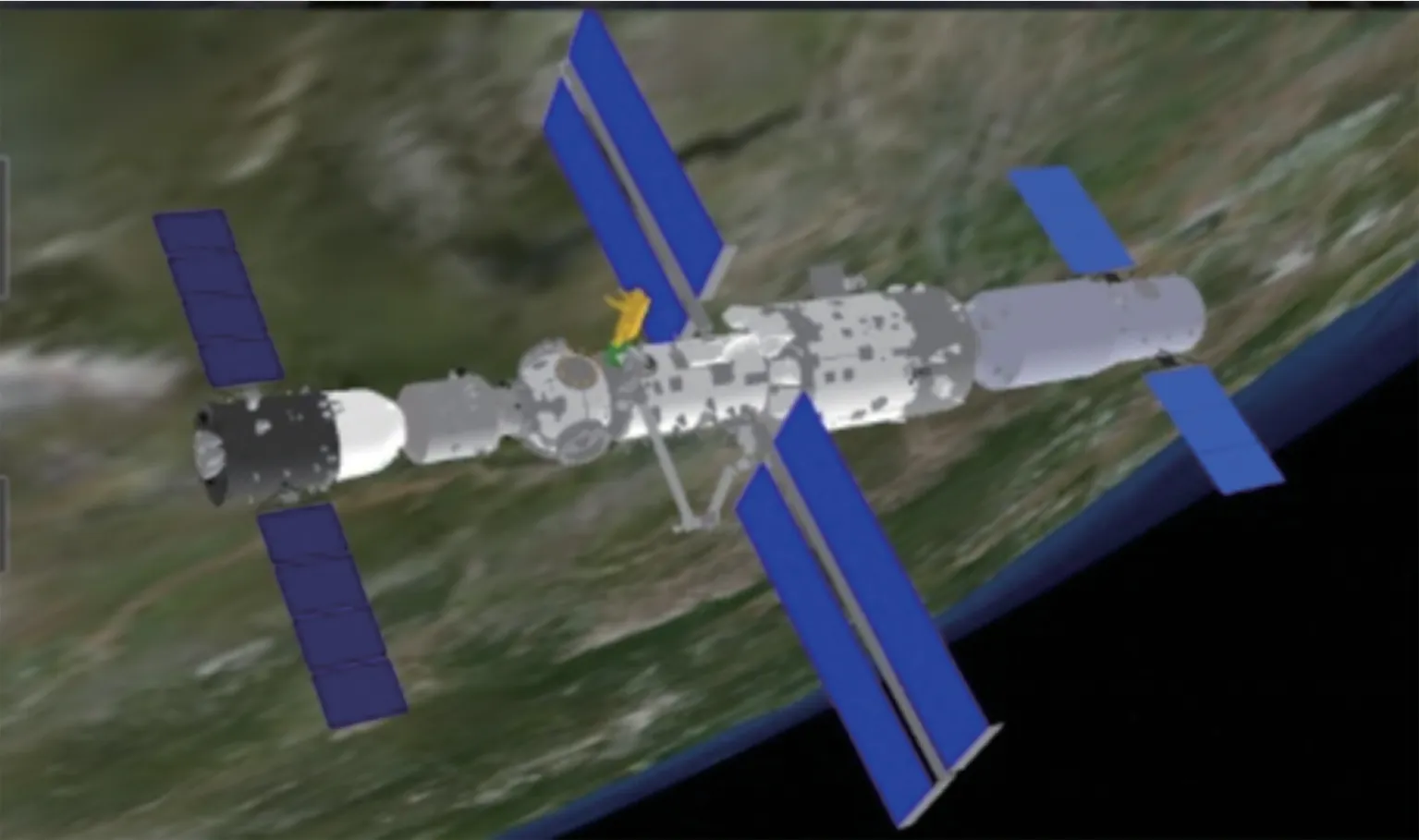
图7 中国空间站机械臂三维图像信息显示Fig.7 3D image display of China space station manipulator
4.5 人机安全性设计
机械臂人机安全性从三个维度进行设计:机械臂自身安全性、碰撞检测预警安全、地面仿真与监控。
为保证舱外航天员在机械臂末端上的安全性,设计机械臂内和笔记本内的双重碰撞检测机制,可在任务过程中随时进行安全预警。机械臂内碰撞检测主要在大范围转移过程中开启,在设计安全阈值的前提下,在显示参数页面进行颜色变色提示,并触发操作台的报警,采用灯光闪烁或者蜂鸣,提示舱内航天员及时进行故障处置。笔记本内碰撞检测模型精细化,在整个任务过程中进行安全提示,一旦出现碰撞时距离数据变成红色,并弹框进行碰撞预警提示,舱内航天员此时若需操控,需要切换至点动模式进行操作。
地面仿真与监控方式,主要在任务前开展路径规划安全性仿真分析,并在任务过程中随时监视机械臂的安全距离,一旦发现安全距离危险,可随时中止任务。
5 空间站机械臂人机系统验证
5.1 人机系统验证规划
为验证机械臂人机系统人机功能分配合理性、设计要素全面性、设计要求合理性,需要分三个维度对机械臂人机系统开展验证规划,包含专项仿真验证,地面人在回路验证,在轨人在回路验证三部分,如表2 所示,进行相互补充验证,最终覆盖整个空间站机械臂人机系统各方面[18-21]。
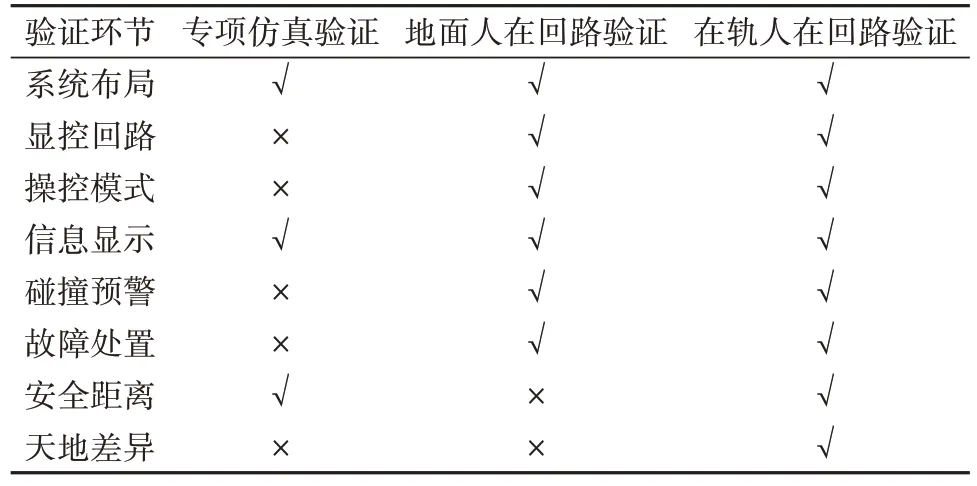
表2 空间站机械臂人机系统验证规划Table 2 Verification planning of human-robot system for space station manipulator
5.2 专项仿真验证
利用人机工效仿真软件,建立空间机械臂人机系统核心部件操作场景环境,如图8所示,根据航天员在失重环境下中性体位研究,控制航天员的运动范围和操作动作,对航天员操控机械臂动作的可视性、可达性、可操作性、安全性进行仿真分析。
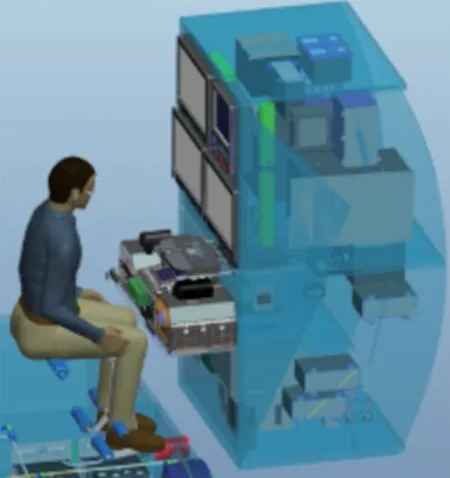
图8 人机系统布局仿真分析Fig.8 Simulation analysis of human-robot system layout
同时,机械臂运动过程需要保证航天员、机械臂与舱体的安全,避免发生碰撞事件,造成严重事故。因此利用机械臂规划和干涉检查工具开展对机械臂运动全过程的安全仿真分析,可以实现不同构型下机械臂与舱体、航天员与舱体最近距离分析,如表3所示。若出现安全风险,及时调整机械臂运动构型,或者给舱内航天员操控时限定操作距离范围,保证协同作业的安全性。
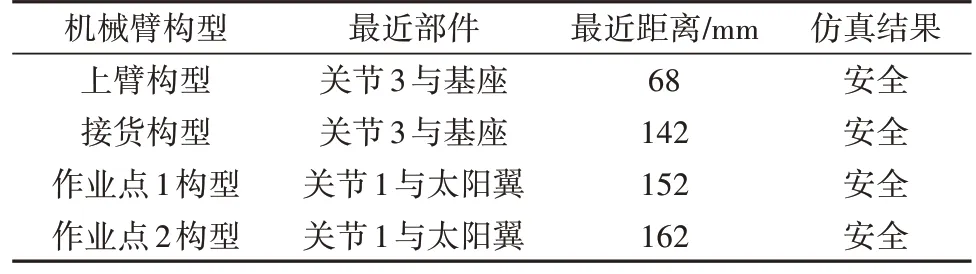
表3 空间站机械臂人机系统安全性仿真结果Table 3 The security simulation results of human-robot system for space station manipulator
5.3 地面人在回路验证
为在地面开展更加充分的舱内外协同操作验证,采用人在回路的形式,分模拟环境人在回路和真实舱体环境人在回路验证两种方式,相互补充验证,最终覆盖机械臂人机系统的所有要素。
模拟环境人在回路,采用硬件操作台和显示器,其他采用软件形式模拟机械臂运动学和动力学特性,模拟舱体相机图像和机械臂图像,模拟舱外光照、轨道等参数,模拟舱外航天员的位置关系和动作,搭建一套机械臂人机系统验证平台,如图9所示,主要验证人在回路中的系统布局、显控回路、控制模式、信息显示、报警与故障应急、操控认知一致性、碰撞安全风险、信息显示充分性、任务分配合理性等。该方式的验证需要开展机械臂任务覆盖性分析,包括机械臂支持巡检,机械臂支持EVA所有任务等。

图9 空间站机械臂模拟环境人在回路验证场景Fig.9 Display and control loop scene verification of humanrobot for space station manipulator

图10 空间站机械臂真实舱体环境人在回路验证场景Fig.10 Display and control loop scene verification of humanrobot for space station manipulator
真实舱体环境人在回路,采用人着服进入舱体内部进行机械臂操控,开启舱内照明、振动、声音等环境,通过典型的单个巡检任务和支持EVA 任务设计,与舱外的航天员进行沟通协同,共同完成任务,重点验证各系统接口设计合理性、舱内设备布局、舱内环境设计、多方协同沟通流畅性,以及在模拟环境人在回路中验证充分性和合理性,验证结果如表4所示。
5.4 在轨人在回路验证
由于天地差异影响,地面搭建的机械臂人机验证场景无法进行有效验证,需要在轨根据真实任务进行多次验证,主要验证其系统布局、显控回路、操控模式、人机界面等的合理性。在轨验证时,由地面或舱内航天员操控机械臂并监视运动状态,舱外航天员负责具体设备的安装拆卸等操作,地面人员提供操作支持并进行风险预测,具体验证情况和场景如图11所示。

图11 空间站机械臂人机系统在轨验证场景Fig.11 On-orbit verification scene of the human-robot system for space station manipulator
通过4 次在轨舱外活动人在回路验证,采用舱外航天员指挥,舱内航天员以默认步长的末端点动模式对机械臂实现多次移动控制,验证结果未发生安全事件,说明机械臂人机系统的设计是正确的、合理的。
6 结论
通过对国际空间站机械臂人机系统设计情况的调研,以及我国空间站机械臂人机协同作业需求,开展了空间站机械臂人机系统设计与验证实现。本文根据工程实践总结的经验,建立了空间站机械臂人机系统“管理-设计-验证”的全周期人机设计体系,通过人机项目规划、人机功能分配等管理要素,针对性地开展了空间机械臂人机系统详细设计,最后,从仿真分析、地面验证、在轨验证三大方面对人机系统进行了全要素全流程的验证。设计的机械臂人机系统成功应用于在轨舱外活动,保障了航天员乘组的安全,也为后续空间站机械臂人机系统的设计与验证提供了体系借鉴和工程指导。
猜你喜欢
中学生数理化·八年级物理人教版(2023年6期)2023-05-25
军事文摘(2023年4期)2023-03-22
军事文摘(2022年18期)2022-10-14
青少年科技博览(中学版)(2022年6期)2022-08-31
军事文摘(2022年8期)2022-05-25
小天使·三年级语数英综合(2022年4期)2022-04-28
军事文摘(2021年18期)2021-12-02
南都周刊(2021年3期)2021-04-22
小哥白尼(趣味科学)(2019年10期)2020-01-18
军事文摘(2019年18期)2019-09-25