基于路面识别算法的分布式驱动汽车驱动防滑控制策略
2024-03-19 11:47常九健吴佳豪方建平
重庆理工大学学报(自然科学) 2024年2期
常九健,吴佳豪,方建平
(1.合肥工业大学汽车工程技术研究院,合肥 230000;2.合肥工业大学汽车与交通工程学院,合肥 230000)
0 引言
随着汽车工业的迅猛发展,汽车保有量不断上升,石油危机、排放超标、环境恶化等问题也接踵而来[1]。纯电动汽车凭其污染排放低、行车噪音小、能源来源广等优点,受到政府科技政策的引导和支持[2],逐渐成为未来汽车市场的主流[3]。分布式电驱动汽车改善了传统集中式驱动传动链长、传动效率低的缺点[4],优化了底盘结构。轮毂电机驱动能够让每个车轮单独输出大扭矩[5],虽然在湿滑、冰雪等低附着系数路面可能发生滑转,但是驱动防滑控制系统(acceleration slip regulation,ASR)可以有效地降低车辆滑转情况的发生,有助于提高整车的动力性和稳定性[6],因此针对分布式驱动汽车的ASR系统的研究必不可少。
现有的驱动防滑控制方法主要有2类[7]:一类是直接转矩控制,通过计算最优电机扭矩使得车轮输出最大牵引力,如Hori等[8-9]提出的模型跟踪控制(MFC)和最大可传递转矩估计(MTTE)算法;另一类是滑转率控制,通过调节电机扭矩使得车轮滑转率跟踪一个目标值。如蒋智通[10]根据滑转率的大小将滑转率分为4个区间,采用逻辑门限值的方法建立了ASR控制策略,但是该方法需要大量的标定工作,过程繁琐复杂。孙大许等[11]提出了RBF系统辨识的单神经元自适应PID控制算法,但是仿真结果滑转率很长时间不能收敛到目标值。Nguyen等[12]针对分布式汽车非线性时变的特点,提出了一种分层LQR算法,结果表明在平坦和非平坦路面的控制超调和误差较小,但是需要对轮胎的纵向刚度进行准确的估计,而且仅针对定滑转率进行跟踪控制。
这些方法都需要依赖于路面附着系数和车轮垂直载荷等参数的估计或测量。然而现有的研究在设计控制策略时,并没有充分考虑整车质量变化和低附着道路坡度因素对车轮垂直载荷的影响,这些因素会导致路面附着系数估计的误差和控制性能的下降。此外,现有的研究中基于轮胎模型的路面附着系数估计算法过于复杂,如武钟财[13]基于dugoff轮胎模型设计了双扩展卡尔曼滤波器来估计路面附着系数;Sharifzadeh等[14]基于LuGre和Burkhardt轮胎模型对路面附着系数进行了估计,但是这些方法都需要对轮胎模型参数进行辨识或标定,而且实车验证效果不佳[15-16],限制了实车应用。
本文中针对上述问题提出了基于利用附着系数和滑转率曲线,考虑质量和坡度估计的路面识别算法,采用以最优滑转率作为目标滑转率的驱动防滑控制策略,最后通过Carsim和Simulink联合仿真与实车试验进行验证,将滑模控制算法与传统的PI控制做对比,结果表明文中采用的控制策略能有效控制车轮的滑转。
1 驱动防滑控制系统
1.1 关键状态参数估计
不同的路面条件下,由于最优滑转率不同,其对应的峰值附着系数也不相同,因此在选择驱动防滑控制目标前,需要对当前行驶的路面条件进行辨识。
驱动防滑控制系统需要具备良好的适应性,因此要对车辆状态、道路状况等参数进行估计。其中,路面附着系数是一个关键的参数,它反映了路面能提供的最大驱动力,直接影响到驱动防滑控制目标值的选择。路面附着系数的准确估计依赖于车轮垂直载荷的精确估计,车轮的垂直载荷受到整车质量、道路坡度、横纵向加速度等参数的影响。因此在进行路面附着系数识别之前,需要先进行整车质量和道路坡度的估计。
1.1.1 基于递归最小二乘法的质量估计
汽车沿坡道行驶时驱动力与阻力平衡,其纵向动力学平衡方程为:
式中:Fx为纵向驱动力;Cd为空气阻力系数;A为迎风面积;ρ为空气密度;g为重力加速度;f为滚动阻力系数;θ为坡度角。
各车轮的滚动模型为:
式中:Tdi为车轮的驱动转矩;Iw为转动惯量;R为滚动半径。
利用纵向加速度传感器采集汽车加速度信号,其原理可以用质量-弹簧系统进行简化,如图1所示。
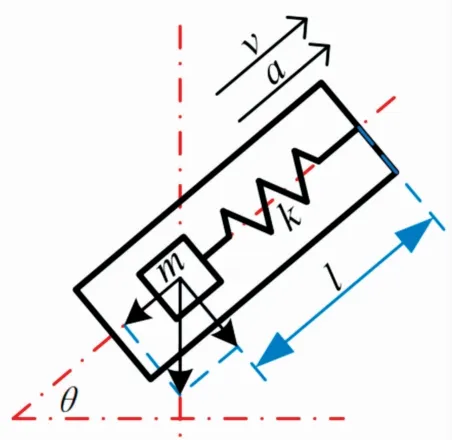
图1 加速度传感器原理
水平路面弹簧的变形全部由质量块加速度产生,传感器的实测值即真实值。当处于一定坡度时,加速度传感器采集的实际信号包括弹簧质量块加速度及重力加速度沿坡度方向的分量[17],表达式为:
式中:i为道路的坡度。
考虑到实际道路坡度较小,认为cosθ≈1,故可以将坡度和质量解耦,采用实时性强的递归最小二乘法进行质量估计。将式(2)与式(3)代入式(1),得到系统的矩阵表达为:
其中输出表示为:
观测矩阵为:
式中:y为质量估计系统的输出;φ为观测矩阵;为待估计的整车质量。递归最小二乘法估计质量的递归过程可用如式(5)所示:
1.1.2 道路坡度融合估计
假设车辆在坡道上行驶时均为直线工况,首先采用基于纵向动力学方程对道路坡度进行估计,系统的状态空间表达式为:
其中状态方程为:
测量方程为:
将非线性系统f(xk)线性化处理,更新步不变,预测步调整如下:
式中Jf为雅可比矩阵:
接着基于加速度信号对道路坡度进行估计,采用分隔周期的方法,计算加速度如下:
式中:n为当前时刻;n-k为当前周期前k个周期;k为周期间隔数;需根据具体车速信号质量进行确定;T为计算周期。
系统方程为:
式中:ym为坡度估计系统的输出;u=g为观测矩阵;b=sinθ为系统估计。
采用递归最小二乘法,得到系统估计^及道路坡度估计值为:
通过低通滤波去除基于纵向动力学方程的坡度估计中的高频信号,通过高通滤波去除基于加速度信号的坡度估计中的低频信号[18],得到最终的道路坡度的估计值为:
式中:τ为时间常数;为基于纵向动力学方程的坡度估计值;为基于加速度信号的坡度估计值。
1.2 路面识别算法
1.2.1 路面附着系数识别
前文采集加速度信号,估计了质量和道路坡度,根据如下公式得到单个车轮的垂直载荷:
式中:Fzi为垂直载荷;l为轴距;hg为质心高度;ax、ay分别为车辆的横、纵向加速度。
从而得到精准的纵向附着系数:
典型路面的纵向附着系数-滑转率曲线[19]如图2所示。
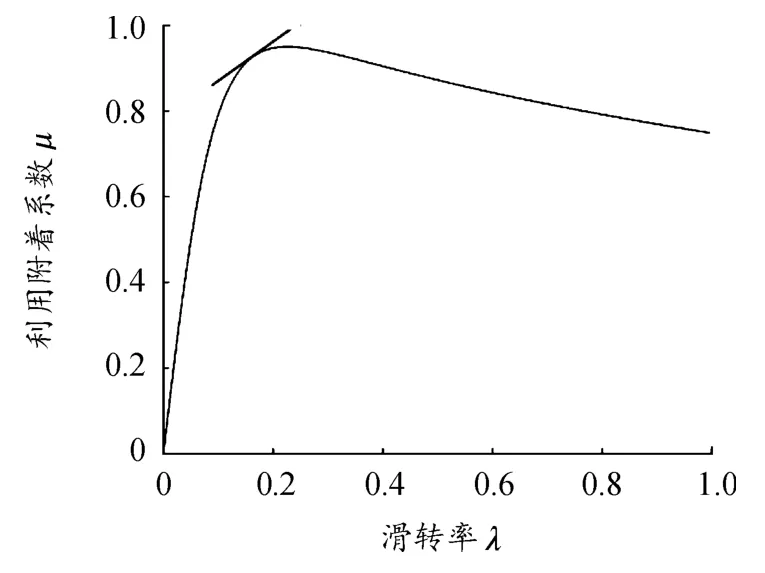
图2 纵向附着系数-滑转率曲线
基于图1,前文纵向附着系数计算值准确,在斜率为零附近,纵向附着系数与路面峰值附着系数接近,变化量小。因此选取斜率为零时的纵向附着系数作为此时的路面附着系数。采用带有遗忘因子的递归最小二乘法对斜率L进行估计,系统方程为:
式中:yμ为路面识别系统的输出;^为斜率的估计值;φ=dλ/dt。
迭代过程表示如下:
式中:λ为遗忘因子。遗忘因子λ取值越大,估计精度越高,同时会造成收敛速度降低。遗忘因子取值越小,估计精度将会减少,而收敛速度将会提高。λ取值范围一般为[0.95,1]。路面识别算法流程如图3所示。
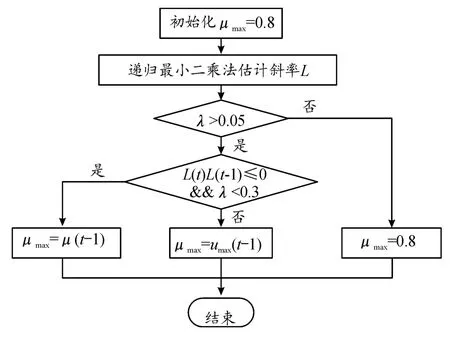
图3 路面识别算法流程
1.2.2 最优滑转率的获取
为得到不同路面条件下的最优滑转率,选用Burckhardt模型[20-21]为基本参考数据,该模型只对路面进行了描述,未考虑轮胎参数发生变化时对附着系数造成的影响,公式为:
式中:c1表示曲线的最大值;c2决定曲线的形状;c3为λ=1时利用附着系数值与最大值之间的差值。
各典型标准路面的拟合系数值如表1所示。
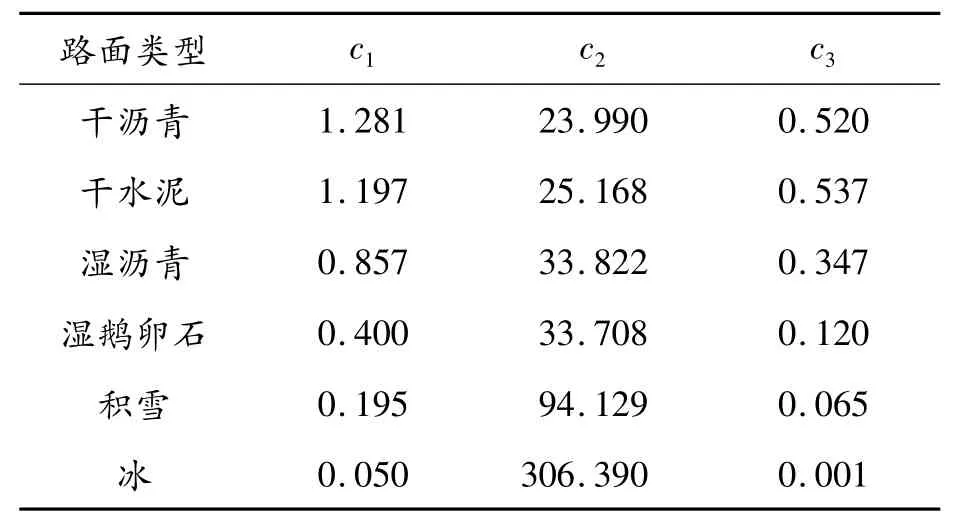
表1 典型路面拟合系数
不同路面条件下的利用附着系数-滑转率曲线,如图4所示。
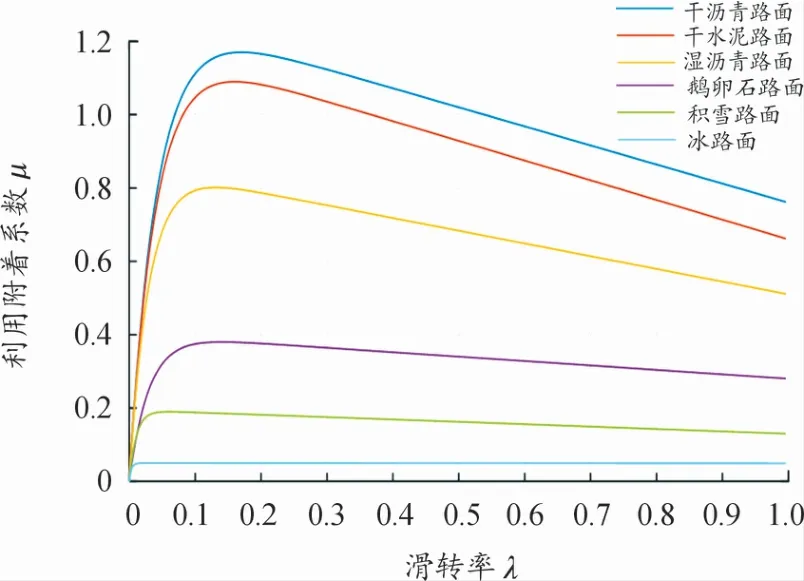
图4 Burckhardt轮胎模型曲线
式(21)对滑转率λ进行求导得:
令式(22)左项为0可得最优滑转率的表达式如下:
将式(23)代入式(21),可得路面附着系数的表达式如下:
根据表1系数确定各种路面的路面附着系数和最优滑转率如表2所示。根据表2线性拟合得到两者的关系曲线为:
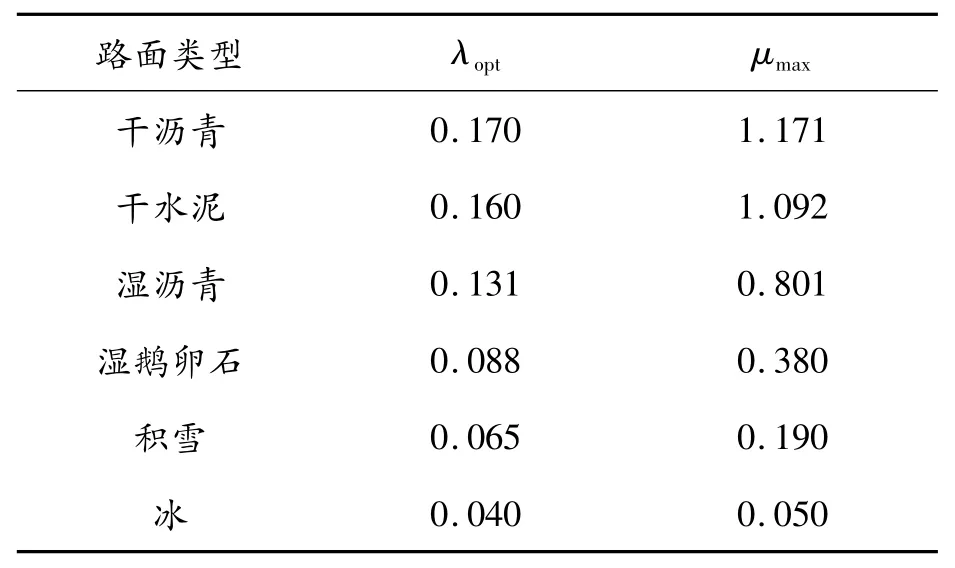
表2 典型路面附着系数及最优滑转率
式中:p1=0.110 9,p2=0.040 88,拟合曲线如图5所示。
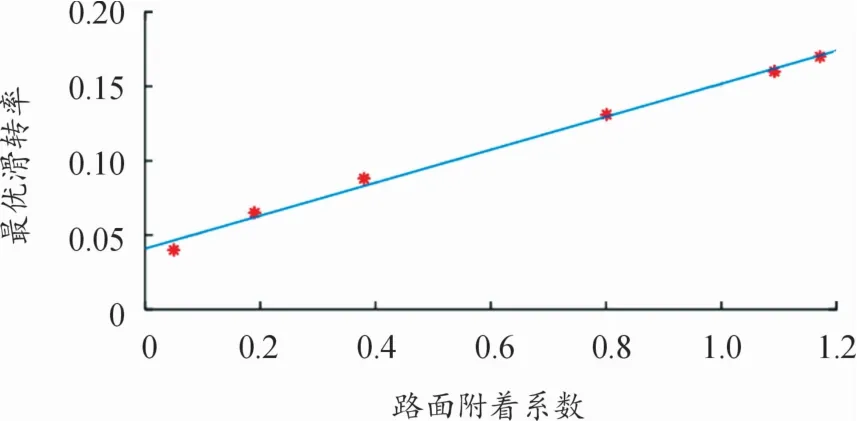
图5 最优滑转率拟合曲线
2 驱动防滑控制策略
2.1 驱动防滑控制介入和退出逻辑
为获取目标滑转率,以滑转率作为驱动防滑控制介入的主要条件,设计计数器模块,并设定滑转率介入门限值λen、退出门限值λout和车速阈值v0。完整的驱动防滑控制介入退出流程如图6所示。
2.2 基于滑模控制的滑转率控制算法
滑模控制系统为:
选取切换面S=e=λ-λd
采用的指数趋近律如下:
式中:ε为控制增益,k为根据扰动选取的值。
为减弱控制过程中的抖振现象,以饱和函数sat(s)代替符号函数sgn(s)定义如下:
式中:Δ为边界层宽度,k=1/Δ,且|ks|≤1。
目标扭矩为:
驱动防滑控制系统整体模型如图7所示。
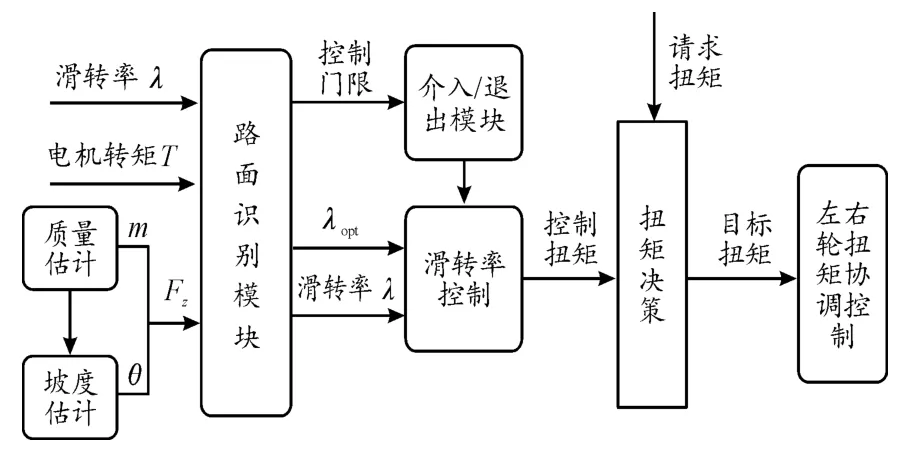
图7 驱动防滑控制系统模型图
2.3 其他协调控制
2.3.1 转向过程滑转率修正
基于横摆角速度信号计算驱动前轮参考车速,且假设后轴车轮滚动方向始终与车辆纵轴方向保持一致,该假设在车辆的侧向加速度小于0.4 g时能够成立[22]。故2个前轮在直行和转向过程中的滑转率可表示为:
2.3.2 防扭矩突变处理
为减缓驱动防滑控制系统退出时由驱动防滑控制扭矩切换到驾驶员扭矩产生的扭矩突变对驾乘舒适性的影响,对退出过程做过渡处理。过渡扭矩的计算如式(31)所示:
式中:Tsw为过渡扭矩;Tcs为驱动防滑控制扭矩;Ttcs为控制器输出扭矩;Treq为驾驶员请求扭矩;Tstep为扭矩系数步长;Csw为扭矩过渡系数;T为退出时扭矩的过渡时间;Ts为控制器的固定算法运行周期;Tstep视实际情况标定。
在退出时,扭矩过渡系数Csw均匀地从0加到1,完成从驱动防滑控制扭矩驾驶员到请求扭矩到之间的平缓过渡。
2.3.3 扭矩决策
当驾驶员请求的扭矩Treq大于当前地面提供的最大驱动力Tmax时,驱动防滑控制系统介入。当目标扭矩Ttcs大于驾驶员请求扭矩Treq时,若继续输出Ttcs会导致Treq持续偏离,因此驱动防滑控制系统应立即释放对电机请求扭矩的控制,将控制权限转交给驾驶员,使输出扭矩跟随驾驶员的期望扭矩。
2.3.4 扭矩协调处理
在对开路面行驶时,需要对左右两侧车轮的扭矩进行协调处理,防止低附着系数侧轮胎滑转,使高低附着系数侧车轮失去动力。
设定车速门限值vlim。当车速v<vlim时,对高附着侧车轮进行同步降扭以保障车辆的正常起步与加速,车速越高,降低的扭矩值越大;当车速v≥vlim时,令高附着侧车轮扭矩与低附着侧车轮扭矩相等以保证汽车的横向稳定性。高附着侧车轮扭矩计算公式[8-9]如下:
式中:Thigh为高附着侧车轮同步降低后的扭矩;Thigh0为高附着侧车轮原始扭矩;Tlow,TCS为低附着侧车轮驱动防滑控制扭矩;Csplit为同步降扭系数。
3 建模仿真与结果分析
3.1 联合仿真平台搭建
为了验证控制策略的可行性,本文中利用Carsim和Simulink搭建了离线仿真平台。包括整车7自由度动力学模型,基于质量估计、坡度估计、附着系数识别的路面识别模块,基于PI和滑模控制的驱动防滑控制策略模型,仅考虑电机外特性的简化轮毂电机模型。Carsim 提供了与Simulink的仿真接口,通过数据交互可以实现联合仿真,以快速验证控制策略。整车参数如表3所示。电机参数如表4所示。
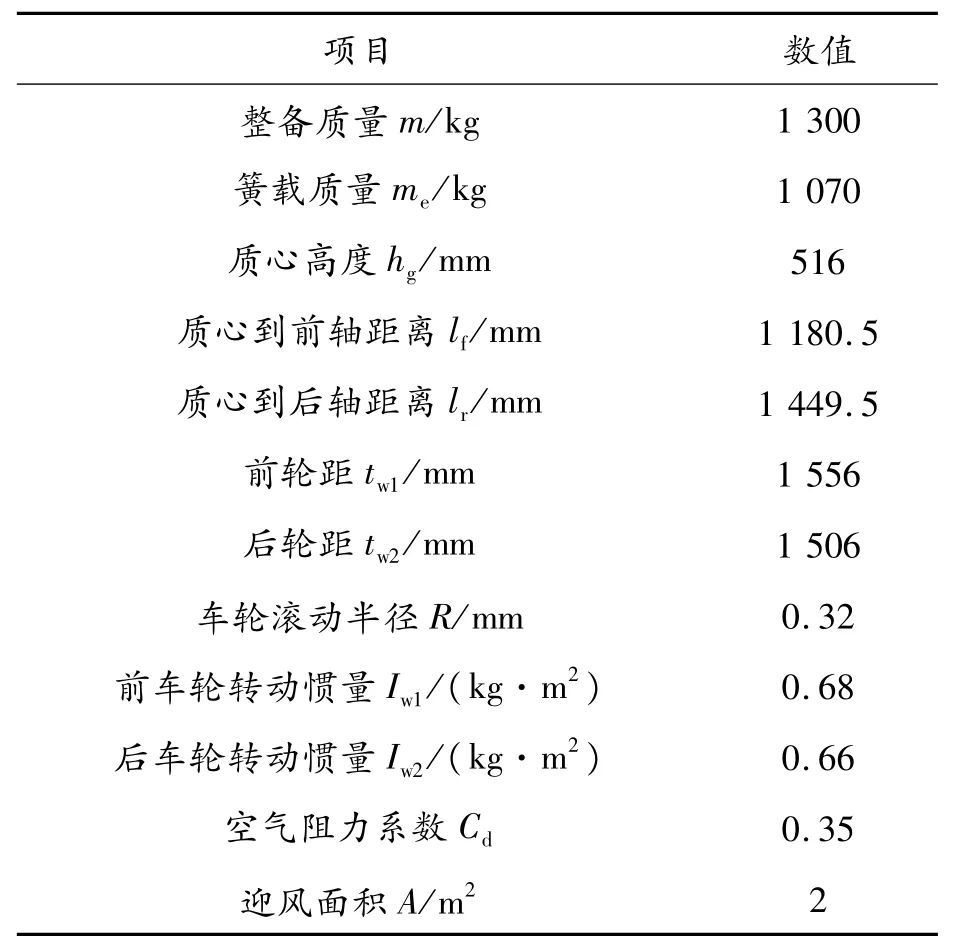
表3 整车参数
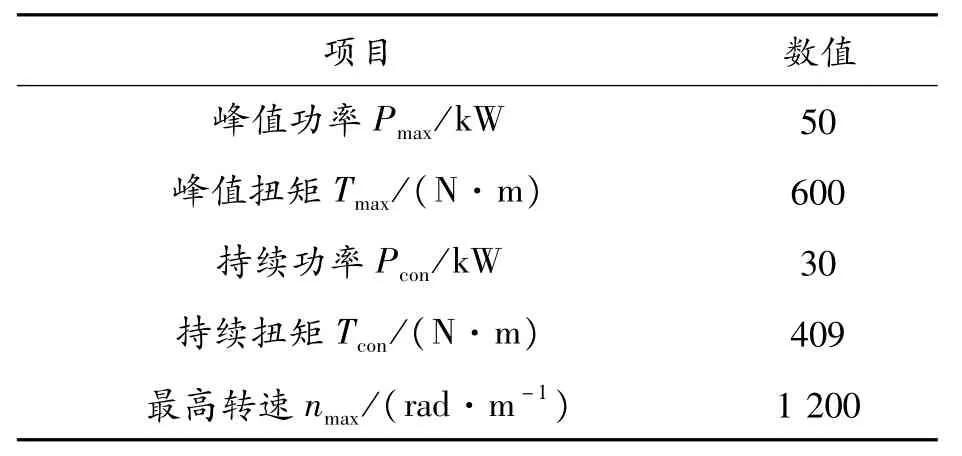
表4 轮毂电机参数
3.2 质量估计仿真分析
在平路空载,平路满载和大坡度满载3种工况下验证质量估计算法的准确性。路面附着系数设置为0.4,整车空载质量为1 300 kg,满载质量为1 800 kg,可实时获得加速度传感器信号并设置传感器噪声,仿真时驾驶员需求转矩设置为如图8所示,各工况的质量估计结果如图9所示。
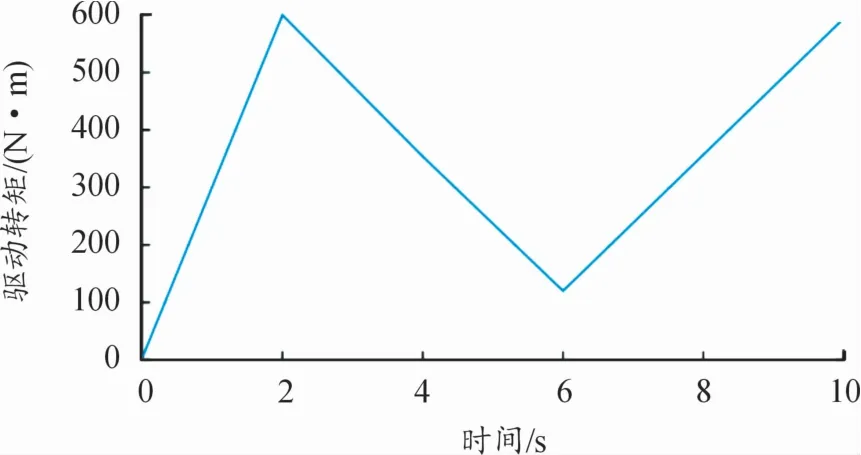
图8 单个车轮驱动转矩
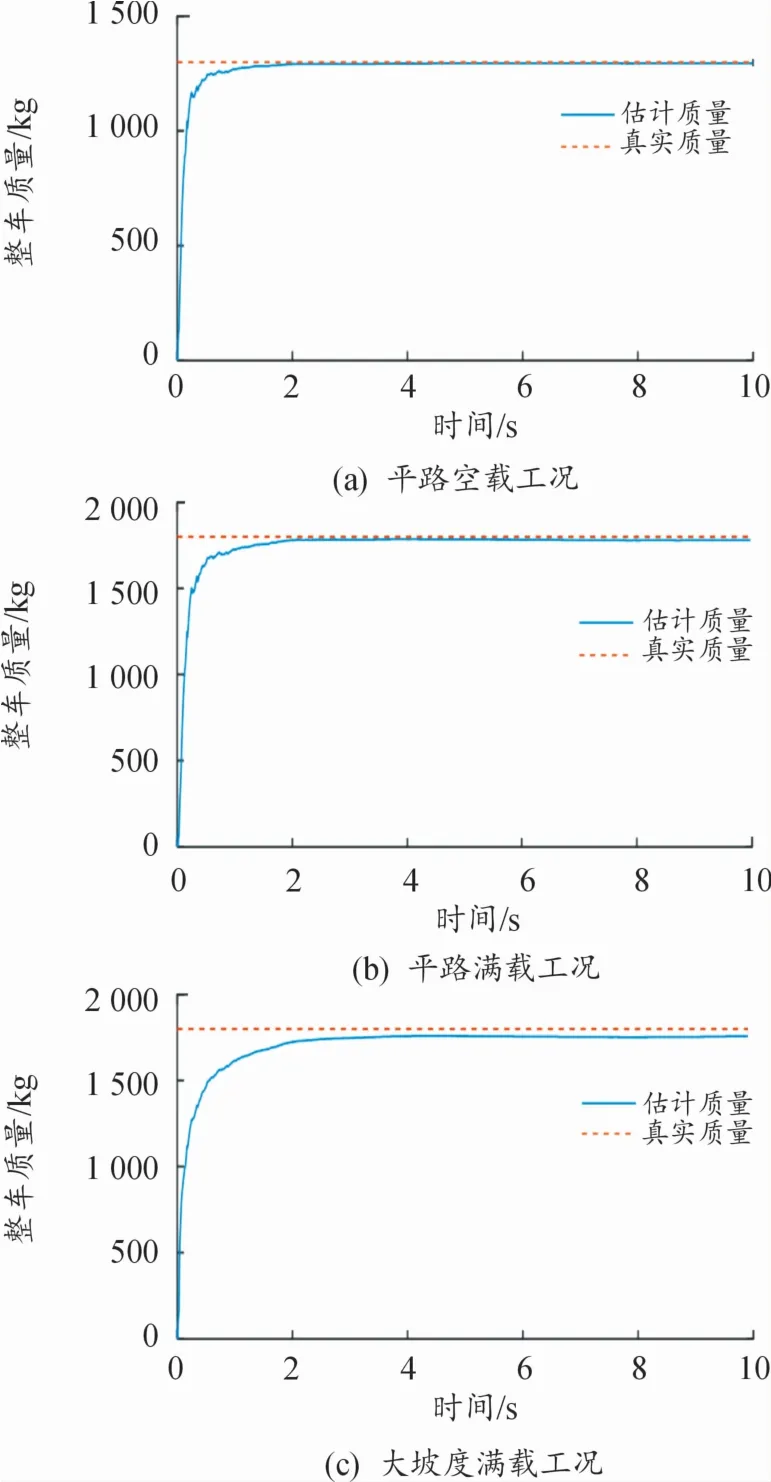
图9 3种工况下的质量估计仿真结果
图9的3种工况验证了车辆在不同坡度、不同质量下的估计效果。图9(a)中质量估计值在1.5 s左右开始收敛到真实值1 300 kg附近,最终估计质量为1 292 kg,估计误差0.6%;图9(b)中最终估计质量为1 782 kg,估计误差1%;图9(c)道路坡度设置为6°,2 s左右开始收敛到真实值附近,最终估计质量为1 758 kg,估计误差2.3%。由此可见质量估计算法在平路下对满载和空载的质量估计均有较高的估计精度,而坡度对质量的估计存在影响,质量估计的误差随坡度的增加而增大。该误差源于模型建立中对含有坡度的三角函数项进行了近似处理,但是仿真结果的估计误差较小,仍在可接受范围内,因此质量估计算法总体具有较好的估计效果。
3.3 坡度估计仿真分析
在一定坡度下验证坡度估计融合算法的准确性。仿真时整车质量为质量估计算法的估计值,加速度传感器信号为已知,并加入一定的噪声信号,电机的驱动转矩如图10所示,坡度估计结果如图11所示。
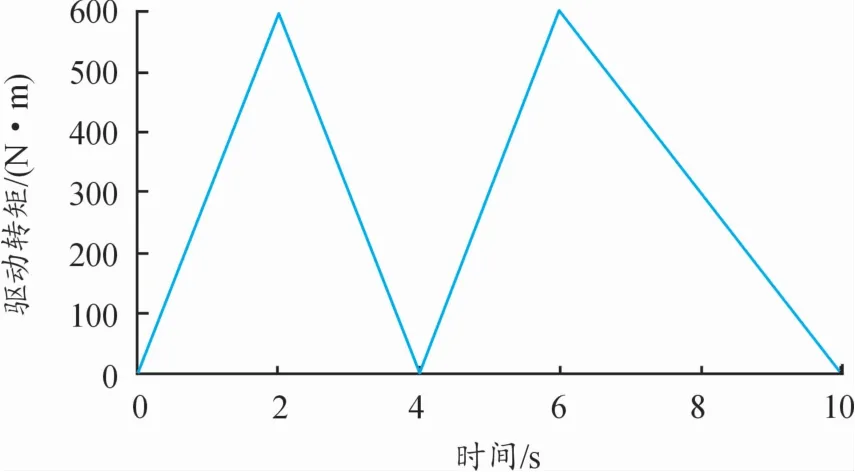
图10 单个车轮驱动转矩
图11工况路面附着系数设置为0.8,道路坡度为6°。该工况基于动力学的坡度估计稳态结果与真实值存在偏差,受转矩变化影响,偏差值在小范围波动,最大相对估计误差为8.3%;受加速度传感器静态偏差的影响,由加速度信号估计的道路坡度与真实值存在0.4°的偏差,相对估计误差为6.7%;而融合算法的估计结果在达到稳态时与真实坡度最为接近,最大相对估计误差为3.3%,因此道路坡度融合算法具有更高的准确度。
3.4 联合仿真结果分析
在低附着系数路面直线加速、对接路面直线起步加速、坡道对开路面直线起步加速3种工况下,对采用路面识别算法的滑模控制策略同PI控制作对比,以滑转率实际值和最优滑转率参考值偏差的均方根误差(root mean squared error,RMSE)为评价指标,如下式:
式中:Tstart为驱动防滑控制介入时刻;Tend为工况的仿真结束时刻或者驱动防滑控制退出时刻。
3.4.1 低附着系数路面直线加速工况分析
图12是低附着系数路面直线加速工况,在Carsim中将路面附着系数设置为0.2,车辆初始速度为0 km/h,加速踏板开度在0.1 s内达到100%。
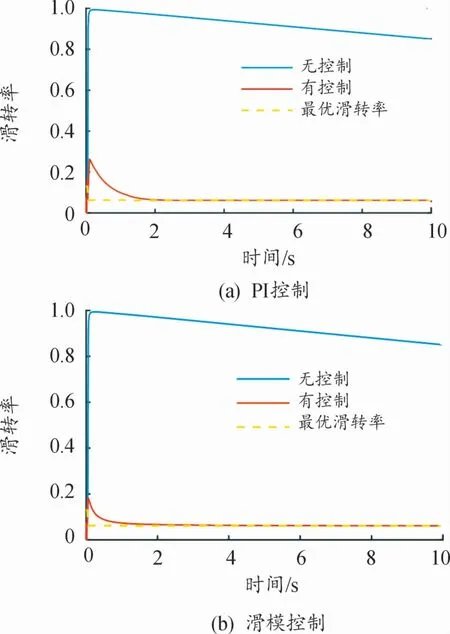
图12 低附着系数路面直线加速工况
图12中对比可以看出控制系统介入后,PI控制和滑模控制在车轮发生打滑后均能将滑转率控制在最优滑转率附近,提高了车辆的动力性。与PI控制相比,滑模控制的最大滑转率为0.18,超调量减小30.7%,收敛时间1 s左右,对比减小44.4%,控制输出更加平滑。
3.4.2 对接路面直线起步加速工况分析
图13是对接路面直线起步加速工况。为验证车辆由经过高、低附着系数路面导致车轮发生滑转时,牵引力控制能否及时介入、退出,在Carsim中将10 m路面附着系数设置为0.8,接着30 m路面设置为0.2,之后路面设置为0.8,加速踏板开度在0.1 s内达到100%。由图中可以看出滑模控制的超调量0.15比PI控制的超调量0.25更小,收敛时间也只有0.05 s,占PI控制的6.25%,说明该策略能在车辆进入低附着系数路面轮胎打滑时迅速反应,使得车辆发生横向失稳可能性的时间更短。
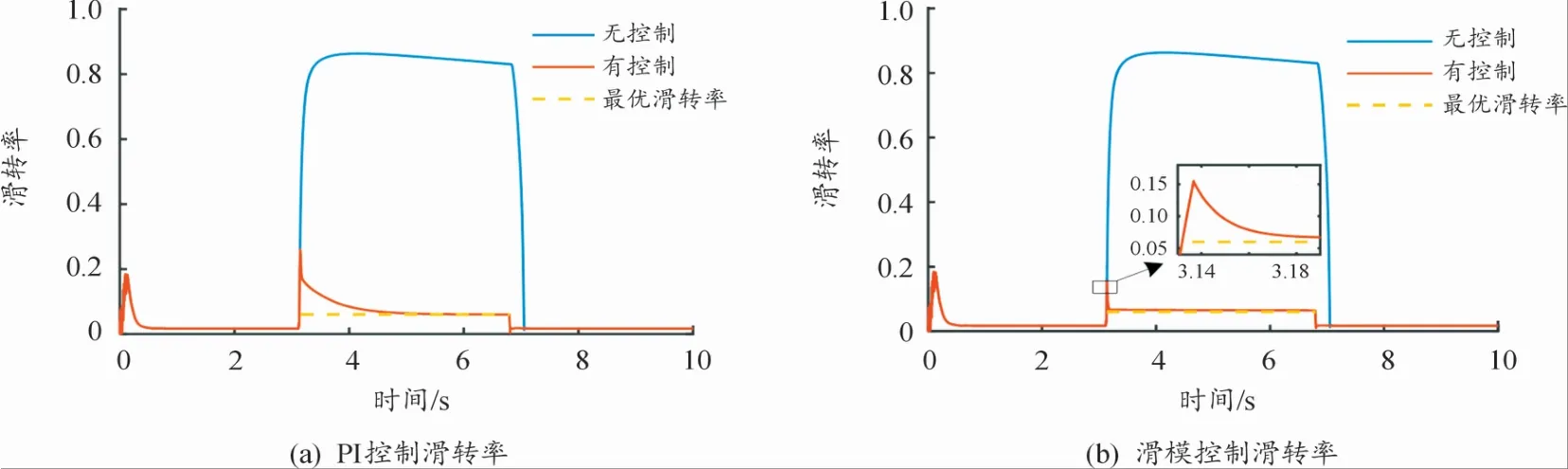
图13 对接路面直线起步加速工况
3.4.3 坡道对开路面直线起步加速工况分析
图14是坡道对开路面行驶时的牵引力控制效果起步加速工况,在Carsim中将路面附着系数前3 m设置为0.8,随后路面右半部分附着系数设置为0.2,道路坡度设置为3°,行驶速度30 km/h。由驱动轮扭矩对比可以看到在1.65 s左右牵引力介入后,左前轮能够及时地同步降扭,随着车速的增加,扭矩越接近右前轮扭矩,车速达到30 km/h时,左右两侧扭矩相等,滑模控制的右前轮扭矩收敛速度远快于PI控制;由滑转率对比可以看出无驱动防滑控制系统介入时,滑转率远远不及最优滑转率,控制系统介入后能迅速接近最优滑转率,而滑模控制仅用0.04 s即收敛,远远快于PI控制的2.2 s。
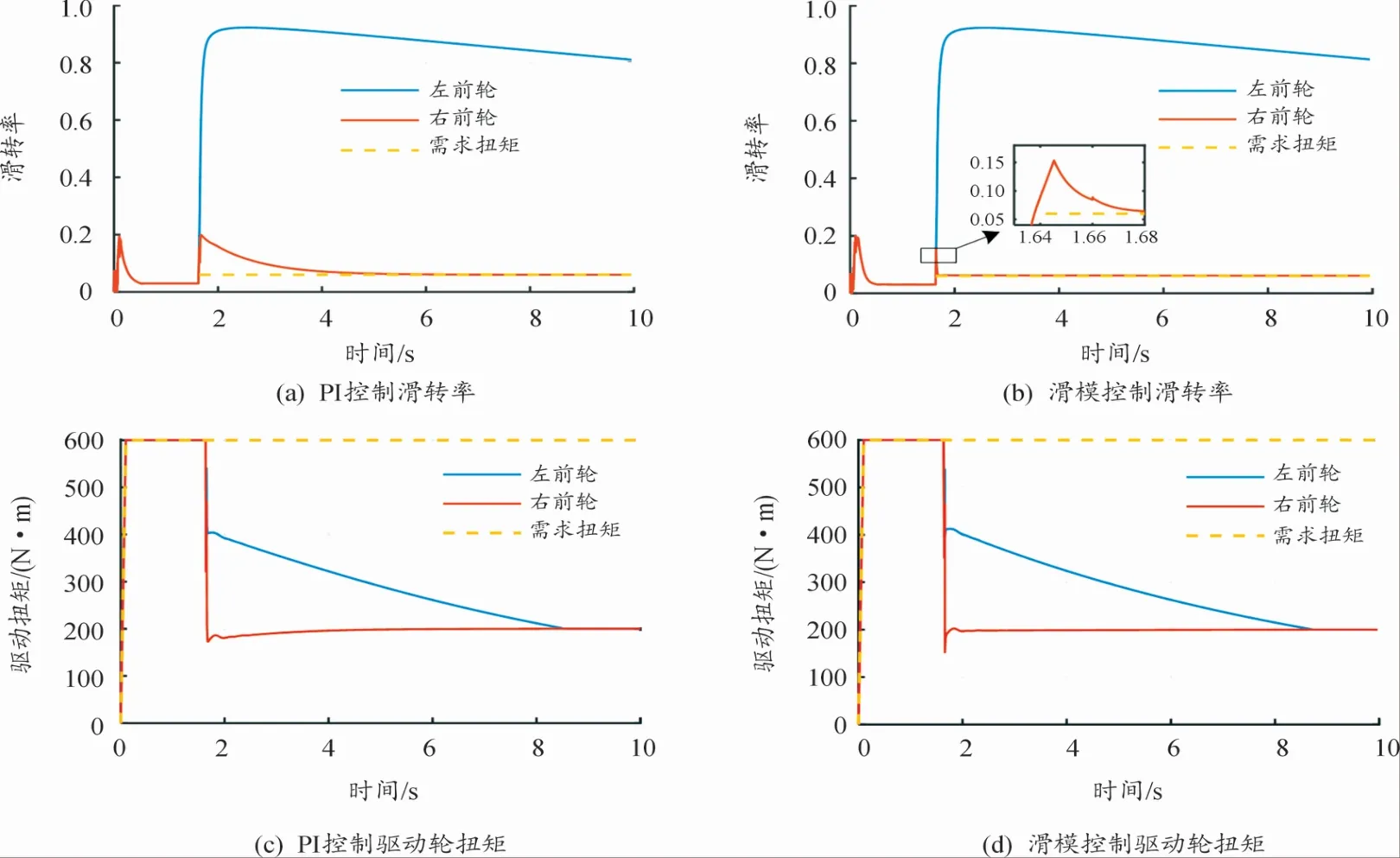
图14 坡道对开路面直线起步加速工况
各工况RMSE值如表5所示。由表5各工况RMSE值也可以看出各工况滑模控制的RMSE值均小于PI控制,平均减小75.1%。滑模控制的实际滑转率总是在最优参考滑转率附近,偏差误差小,跟踪效果更好,工况适应性更好。
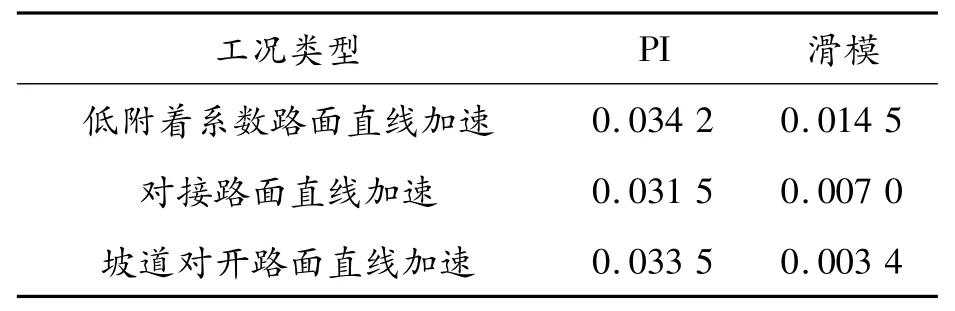
表5 各工况RMSE值
4 实车验证与结果分析
4.1 实车试验平台搭建
基于图15所示的分布式前轮驱动整车平台,搭建了包括传感器、数据采集卡、数据存储器等部件的整车测试系统,实验中采用Controldesk进行统一观测和记录整车状态,在线整定控制参数及门限值等。其中牵引力控制系统所需要观测的一些动力学状态参数如纵向加速度、侧向加速度、横摆角速度等由英国OxTS公司的RT3000设备来测量。通过安装增量式编码器来获取后轴两从动轮的轮速信号从而计算参考车速,如图16所示。整车测试系统如图17所示。

图15 前轮分布式驱动整车

图16 传感器安装

图17 整车测试系统
4.2 实车试验结果分析
为模拟低附着系数路面,在水泥地上铺上地板革并涂装润滑剂,两侧地板革分布的间隔能覆盖整车的宽度,地板革长度为20 m。试验时整车正对行驶在左右两侧的地板革上,由静止起步后控制系统介入,接着将油门踩到底,整车驶入低附着系数路面。整车试验场地布置如图18所示。

图18 整车试验场景
基于PI控制的试验结果如图19所示。基于滑模控制的试验结果如图20所示。
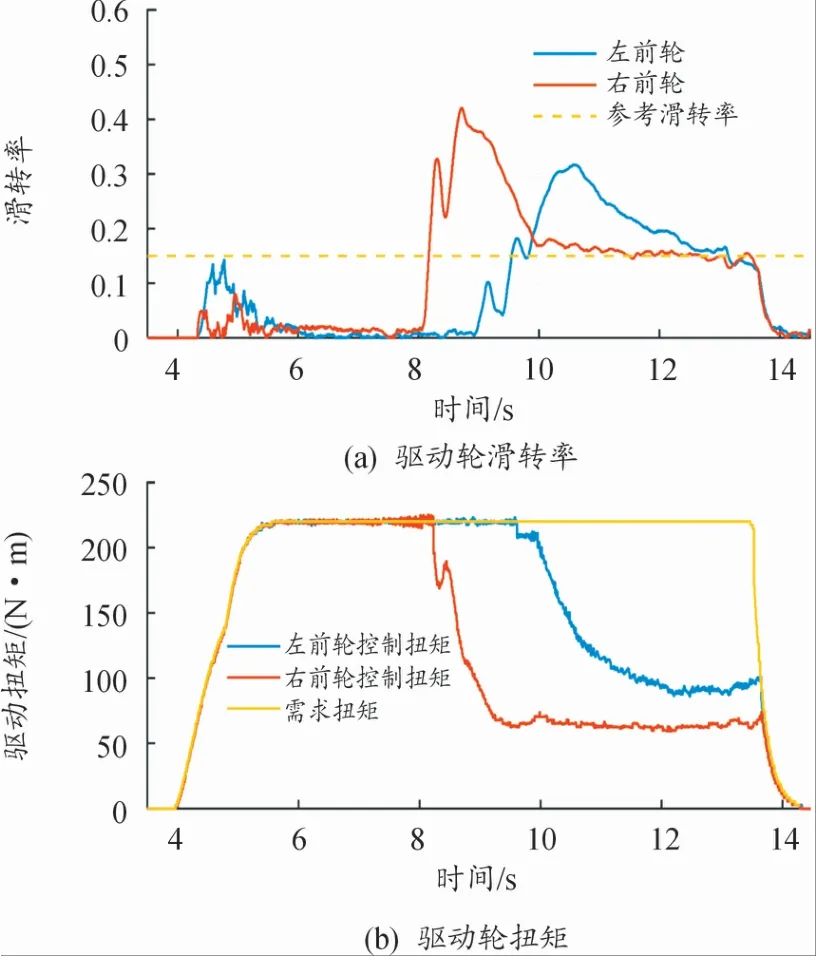
图19 PI控制
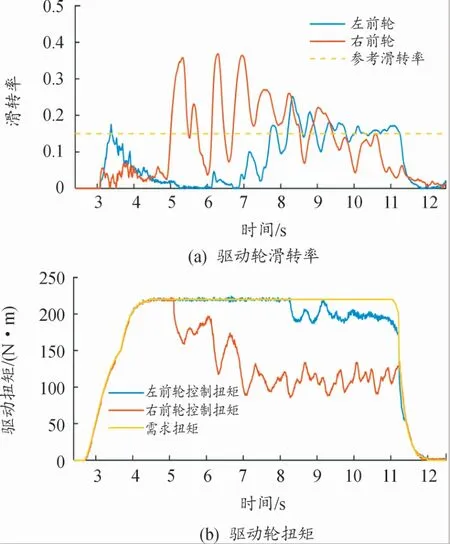
图20 滑模控制
图19(a)中6.2 s左右汽车从水泥路面静止起步,滑转率有一定波动,但是受车速介入门限限制,控制系统没有误介入。8 s左右进入低附着路面,右轮因低附着系数路面打滑,控制系统于8.2 s介入,图19(b)中转矩减小,但有明显超调,经1.8 s滑转率控制稳定,13.75 s控制系统退出。
图20(a)中5 s时进入低附着路面右轮打滑,5.1 s控制系统介入,随后滑转率和控制系统发生震荡,滑转率下降,则控制扭矩增大,滑转率上升,则控制扭矩减小,实际滑转率围绕在目标滑转率0.15附近,图20(b)转矩输出也有波动,但总体超调更小。
试验结果表明滑模控制能显著降低车轮打滑程度,保证行驶稳定性。相比传统的PI控制,滑模控制响应更为迅速,驱动防滑系统介入退出更为灵敏,超调量更小,但是受模型精度、信号干扰、通信延迟的影响等影响实车滑转率存在波动,驱动轮扭矩输出不够平稳,存在一定的驾驶舒适性问题,实车效果不及仿真效果,需要进一步优化提高模型精度。
5 结论
1)所设计的基于整车质量和道路坡度因素的路面识别算法可以增强估计结果精度。
2)联合仿真平台验证了所设计的驱动防滑控制介入退出策略能够有效地降低车轮的滑转率,提高整车的动力性和稳定性,滑模控制比PI控制有更低的RMSE值,工况适应性更好。
3)整车测试系统验证了驱动防滑控制介入退出逻辑能够实现预期功能,滑模控制能有效地降低车轮的滑转程度,相比PI控制,滑模响应更加迅速,控制超调量更小,但存在难以避免的扭矩波动。
4)由于模型在建立过程中与实际车辆具有一定的差距,同时受到各种信号噪声干扰及通信延迟、电机转矩执行精度等的影响,因此滑模控制的实际效果与仿真结果具有一定的差距,对于应用到实车需要对模型做进一步优化。
猜你喜欢
小读者(2019年24期)2020-01-19
城市道桥与防洪(2019年5期)2019-06-26
汽车观察(2019年2期)2019-03-15
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
发明与创新·中学生(2016年7期)2016-05-14
电气化铁道(2016年4期)2016-04-16
河北遥感(2015年2期)2015-07-18