风光储联合发电系统并网控制研究
2024-03-19 11:47赵一豪顾小兴吴远网
重庆理工大学学报(自然科学) 2024年2期
赵一豪,朱 伟,顾小兴,吴远网
(1.常州大学机械与轨道交通学院,江苏 常州 213164;2.江苏星光发电设备有限公司,江苏 泰州 225440;3.扬州大学电气与能源动力工程学院,江苏 扬州 225127)
0 引言
风能和太阳能作为新能源发电形式的主要来源,在全球能源结构中发挥了重要作用[1-3]。然而,由于它们的间歇性和波动性,风光发电系统输出具有随机的波动频率和幅度,导致并网过程产生安全风险[4]。因此,优化大型风光储联合发电系统模型,分析其输出功率波动,同时协同利用联合系统的能量储备及不同能源系统之间的能量交互,实现能量的高效利用,是实现新能源安全可靠并网的关键[5-6]。
目前,国内外学者对风光储联合发电系统的模型优化和控制策略等方面有大量研究[7-8]。李凤祥等[9]采用场景分析法对风光机组出力进行预测,建立协同优化模型,降低了风光预测误差对系统运行经济性的影响,提高了系统运行经济性。Swati等[10]在风光发电系统中实施了串联补偿策略,减轻了转子侧开关产生的定子谐波,同时在低风速条件下提供电压,满足电网需求。Vikayakumar等[11]设计了风光微电网的增强前馈控制器,并将电网侧变流器接入弱电网控制,提高微电网系统稳定性。郑怀华等[12]提出了基于非线性Lyapunov控制的储能型控制系统,相较于传统PI控制响应速度更快、控制精度更高、鲁棒性更强。李辉等[13]针对风电机组变桨控制系统鲁棒性差的问题,提出考虑参数辨识的风电机组变桨控制策略并进行了仿真实验,验证了改进模型具有更好的鲁棒性。
但是随着辐照度、风速等环境条件变化,光伏出力和风机出力呈现出明显的波动性,传统控制方法下发电功率与并网需求难以维持平衡状态[14-15]。在光伏发电系统控制过程中波动性问题尤为突出,针对该问题有学者对扰动观察法(P&O)进行了改进研究。廖银玲等[16]提出了一种基于改进粒子群算法改进的扰动观察法,减少了传统智能算法的迭代过程,能快速跟踪到全局最大功率点,在光照强度突变时均具备快速精准的双重跟踪能力。葛传九等[17]提出了基于布谷鸟算法和扰动观察法相结合的控制方法,通过布谷鸟算法加快收敛速度,提升收敛精度,而后利用小步长扰动观察法进一步提高后期的收敛精度。
在已有的模糊控制改进扰动观察法的研究中[18],使用dP/dU及其变化量作为模糊控制器的输入量调整扰动步长。该方法相较于传统方法更加快速准确地追踪到最大功率点,但是由于输入量的局限性,追踪到的功率点虽已在最大值附近,但仍有提升空间,且功率输出稳定性较差。因此本次研究将输入量优化为dP/dU和dU,并且重新编写了控制器结构,优化了隶属度函数,最终对比实验验证了提出方法的优越之处。然后将改进后的控制方法应用到光伏发电系统中,此外,建立了风力机模型,并通过最佳叶尖速比策略控制最大功率点,保证功率稳定输出,并且把新的光伏系统和风力发电系统并网。并网过程中,为了防止冗余能源浪费,储能系统中蓄电池实施DC-DC控制策略平抑功率波动,削峰填谷,实现功率平衡,减小线路损耗,提高电力系统运行的稳定性和经济性。
1 光伏发电系统
1.1 光伏发电阵列输出特性
光伏阵列的输出功率与辐照度和温度有关,通过改变辐照度或温度可改变光伏阵列的输出。其出力表达式为[19]
式中:PPV为光伏出力;GAC为辐照度;PSTC为标准测试条件下(辐照度1 000W/m2,温度25℃)的最大测试功率;GSTC为标准测试条件下的辐照度(1 000W/m2);k为功率温度系数;Tc为电池板工作温度;Tr为参考温度。
选择最大功率213.15W 的光伏阵列模型,并联数为10,串联数为70,环境温度选择25℃,辐照度选择900 W/m2和1 000 W/m2,使用Simulink建立太阳能电池模型,仿真得到该环境下光伏阵列输出特性曲线,如图1所示。
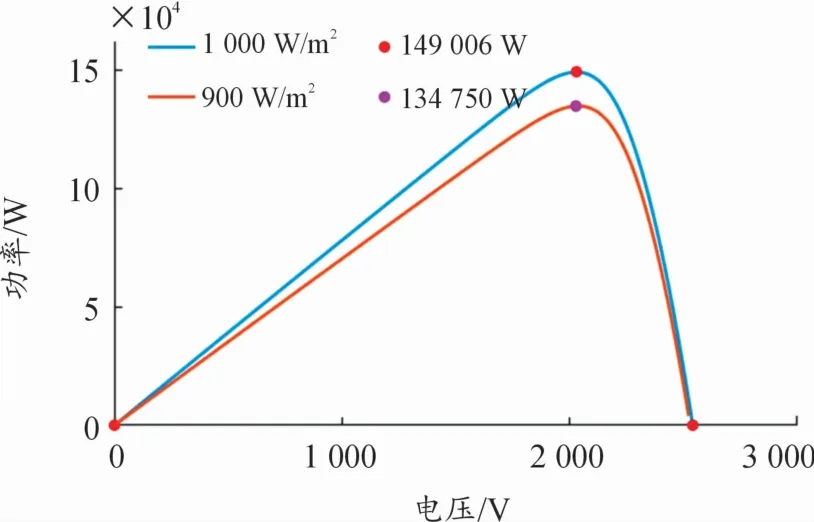
图1 光伏阵列输出特性曲线
图1中的标记点分别为900 W/m2和1 000 W/m2辐照度条件下光伏阵列的最大功率点,即900W/m2时最大功率点电压为2 027 V,最大功率为134 750 W,1 000 W/m2时最大功率点电压为2 030 V,最大功率为149 006 W,以该数据为标准验证最大功率点的跟踪效果。
1.2 光伏发电系统最大功率点跟踪控制
传统的最大功率点跟踪(MPPT)控制方法有扰动观察法和电导增量法等。扰动观察法跟踪方法简单,但易损失部分功率,且跟踪速度和准确度较低。电导增量法相较于扰动观察法响应快、精度高,但在实际应用中对传感器精度要求较高,造价高。模糊控制改进的扰动观察法利用模糊语言描述扰动前后输入变化的大小和正负,结合光伏阵列的输出特性制定模糊控制规则,经过模糊运算和模糊推理,自动调整扰动步长Us,以提高最大功率点跟踪的速度和精度。
根据光伏电池输出特性曲线分析可得如下电压扰动表达式[20]。
式中:α为变步长速度因子,可调整跟踪速度。
由式(2)可得,最大功率点处曲线斜率为0(dP/dU=0),当工作点远离最大功率点时跟踪步长大,反之步长小。α可由式(3)估算。
式中:Ustep_max是定步长扰动观察法允许的最大步长,|dP/dU|可由式(4)估算。
式中:m为接近1的正数;UOC为光伏阵列的开路电压。变步长速度因子α可先由式(3)和式(4)计算其范围,再通过实验调整决定其最终的取值。
以此可确定当前工作点离最大功率点的靠近程度,电压变化量dU的正负也可用来判断当前工作点的运动轨迹。综合这些判断结果和实际模糊控制规则,可以确定适当的扰动步长Us。
改进后的扰动观察法流程如图2所示。控制原理为MPPT控制器从光伏阵列采集当前电压U与电流I,而后计算当前功率P。将dP/dU和dU选择为模糊控制器的输入,将扰动步长Us选择为模糊控制器的输出。模糊控制器对输入量进行模糊化,并根据模糊规则隶属度函数给出输出量的模糊值,最后进行去模糊化处理,输出扰动步长Us。Us控制PWM波形生成器,进而控制绝缘栅双极晶体管(IGBT)的开关,达到调控输出功率的目的。
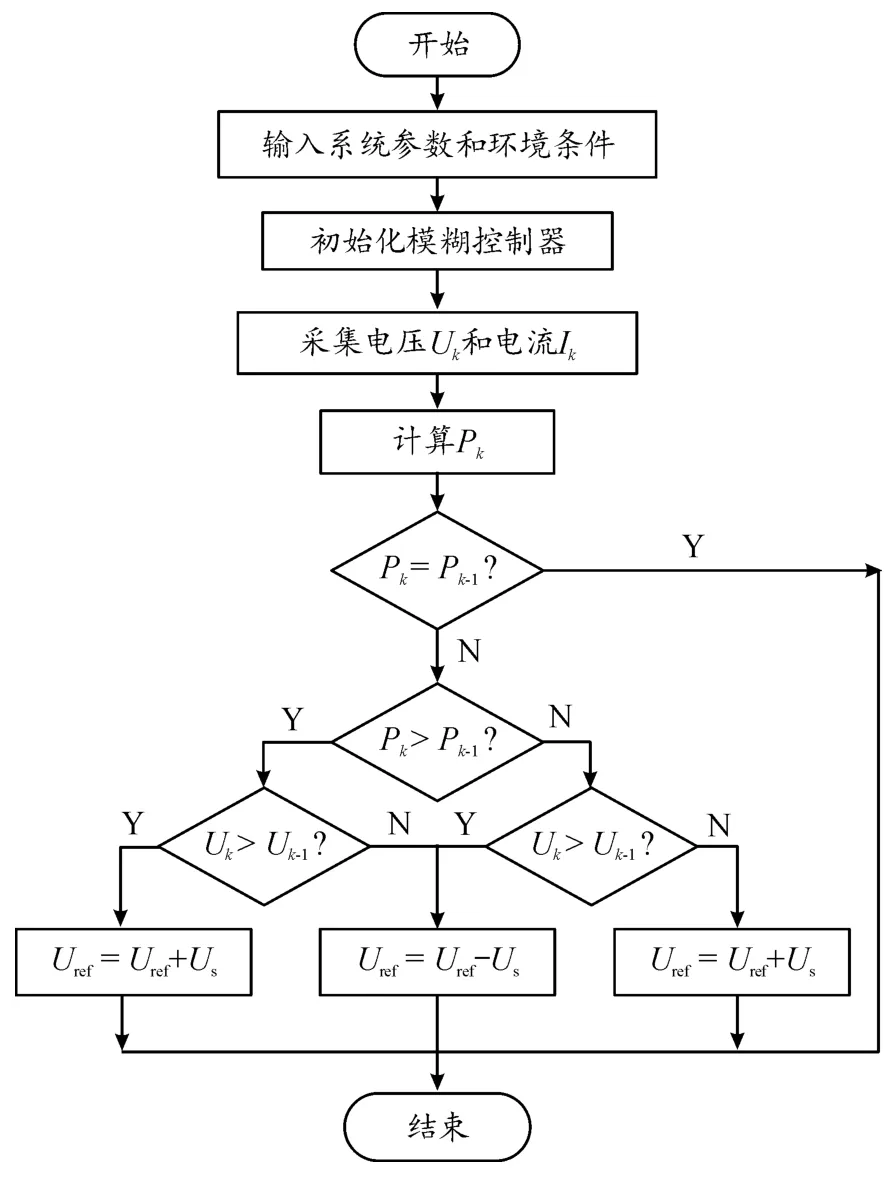
图2 改进后的扰动观察法流程
模糊化:模糊量dP/dU和Us选择相同的模糊变量值(负大、负中、负小、零、正小、正中、正大),对应的模糊子集记为dP/dU,Us={NB,NM,NS,ZO,PB,PM,PS}。其中,dP/dU的模糊论域定义为[-5,5],模糊子集NB、PB采用梯形隶属度函数表示,其他模糊子集采用均匀三角形隶属度函数表示。为减少模糊规则数、降低模糊控制调节频率,变量dU的模糊变量值选择为负、零、正,对应的模糊子集dU={N,ZO,P}。其中,模糊子集N、P采用梯形隶属度函数,模糊子集ZO采用均匀三角形隶属度函数,模糊论域定义为[-1,1]。Us的模糊论域为[-5,5],所有模糊子集采用均匀三角形隶属度函数表示。隶属度函数曲线如图3所示。

图3 隶属度函数曲线
为保证光伏阵列输出具有足够的精度和跟踪速度,制定了Us的模糊控制规则,如表1所示。
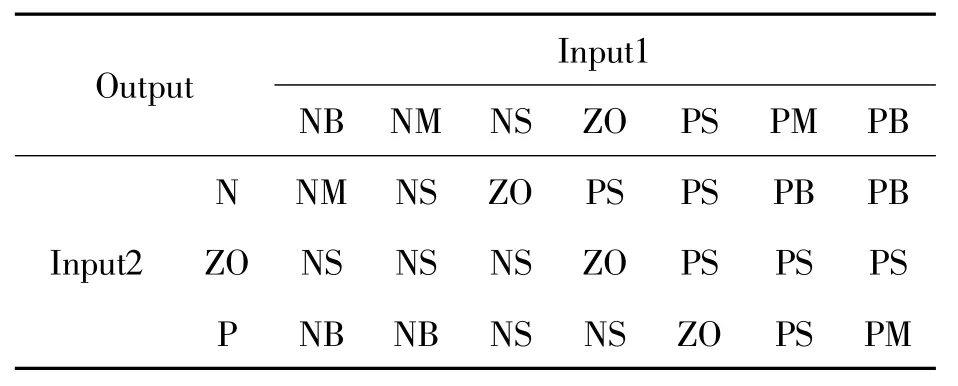
表1 U s模糊控制规则
即表示:
对提出的模糊控制改进的MPPT控制策略进行建模仿真验证。验证模型使用光伏发电系统并网仿真模型。设定环境温度为25℃保持不变,初始条件下辐照度为850 W/m2,当t=1~1.5 s时,辐照度线性增长到1 200 W/m2,当t=2.5~3 s时,辐照度线性下降到850 W/m2,当t=4~4.5 s时,辐照度再次线性增长到1 200 W/m2。选定光伏阵列最大功率为184.701 6W,并联数为2,串联数为6,仿真时间设定为5 s,得到4种MPPT控制方法下光伏阵列的输出功率仿真波形,如图4所示。
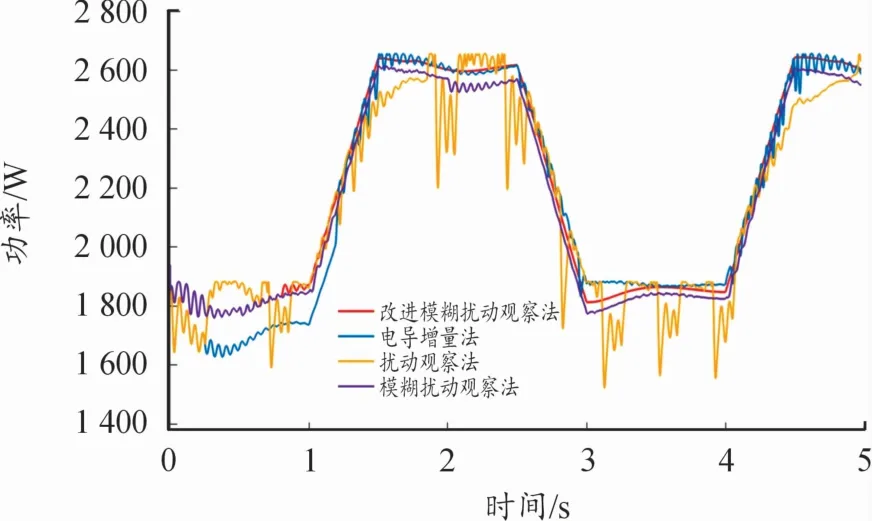
图4 输出功率曲线
分析图4可知,辐照度为850 W/m2时,追踪到的最大功率点为1 850 W 左右;辐照度为1 200 W/m2时,追踪到的最大功率点为2 650 W 左右。扰动观察法在整个输出过程中功率存在较大波动,且在辐照度发生变化时,波动幅度增加,稳定性较差。电导增量法在输出过程中功率波动幅度减小,相较于扰动观察法稳定性略有提高。传统模糊控制扰动观察法输出功率相较于上述2种方法仅产生小范围波动,稳定性再次提高,且追踪到最大功率点所需时间缩短,但在1.5~2.5 s辐照度稳定在1 200 W/m2的过程中出现了波动,且最大功率点的追踪效果仍有提升空间。经以dP/dU和dU为输入的模糊控制扰动观察法改进后,在保证最大功率点追踪效果的同时,进一步降低了辐照度变化过程的波动,输出功率稳定性大幅提高。
1.3 光伏发电系统并网逆变控制
由上文选择控制效果最佳的改进后的MPPT控制方法,搭配Boost升压电路完成光伏发电系统,并配合桥式逆变电路实现光伏发电系统并网。并网逆变器控制采用电流内环和电压外环控制,流程如图5所示。
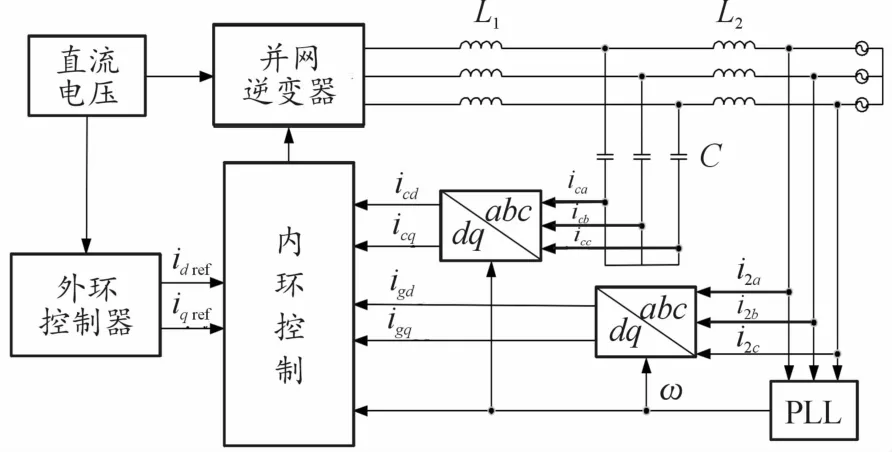
图5 光伏发电系统并网逆变控制流程示意图
2 风力发电系统
2.1 风力机模型
风力发电的基本原理是外界的自然风作用在风力发电系统的扇叶上,带动扇叶的转动,使其产生机械能,再通过电机将机械能转化为电能输送到电网。风力发电功率波动性较大,其具体出力和实际风速相关,风力发电模型为
式中:PW为风力发电出力;PR为额定功率;vc为切断风速;vR为额定风速;vF为截断风速。
按照贝茨定律,可求得风力机的数学模型为
式中:Cp为风能利用系数;ρ为空气密度;R为风轮的半径;V为风速。
根据式(6)可知,在确定了风轮机的半径和外界风速之后,空气密度可以看作是一个常量。因此,风力发电系统的发电功率和风能利用系数Cp成正比关系。风轮转速与风速的比值为叶尖速比λ,其表达式为
式中:ωm为叶片的角速度;R为风轮的半径。式(6)中,Cp可由式(8)近似表示。
式中:β为桨距角,λi由式(9)决定。
从式(8)中可以看出,风能利用系数Cp是叶尖速比λ和桨距角β的函数。当桨距角β取不同的值时,随着β的增大,Cp会减小,而对于某个固定的β值,存在一个唯一的λopt能够使得Cp达到最大值。固定风速,只有当风力机在某一特定转速时,Cp才会达到最大值。对于特定的叶片,λopt是一个固定值。因此根据式(6),为了实现最大功率Pm和最高的风能利用系数Cp,需要根据风速调节风力机的转速。
2.2 风力发电系统机侧控制
使用直驱式永磁同步风力发电系统,控制策略分为机侧变流器控制和网侧变流器控制2部分。其中机侧变流器控制策略选用基于转子磁场定向的矢量控制,网侧变流器控制策略选用基于电网电压定向的矢量控制。风力发电系统的机侧控制结构如图6所示。

图6 风力发电系统机侧控制结构
基于转子磁场定向的矢量控制为电流内环和转速外环双闭环控制策略。转速给定值与检测到的转速之差经过PI控制器得到q轴电流的给定值,无功电流的设定为零。通过安装在发电机转轴上的编码器测量转子磁场位置角度,将检测到的三相定子电流转换为dq坐标系下的电流id和iq,电流差经过电流内环解耦控制器后得到发电机定子d轴和q轴的给定电压。利用变换矩阵将这些电压转换为两相静止坐标系下的给定电压,最后通过空间矢量脉宽调制(SVPWM)模块控制开关管的连通和断开,实现发电机定子端输出三相电压的实际值与给定值的跟踪,从而实现对发电机有功功率的控制,以实现最大风能的捕获。
2.3 风力发电系统网侧控制
基于电网电压定向的网侧变流器的控制系统共有2个电流内环和1个直流电压外环。在电压定向的控制下,ABC静止坐标系下的三相线电流ia、ib、ic被变换到dq坐标系下的两相电流id、iq,对这2个分量分别进行控制,最后通过SVPWM模块控制开关管的连通和断开。基于电网电压定向的网侧变流器控制结构如图7所示。
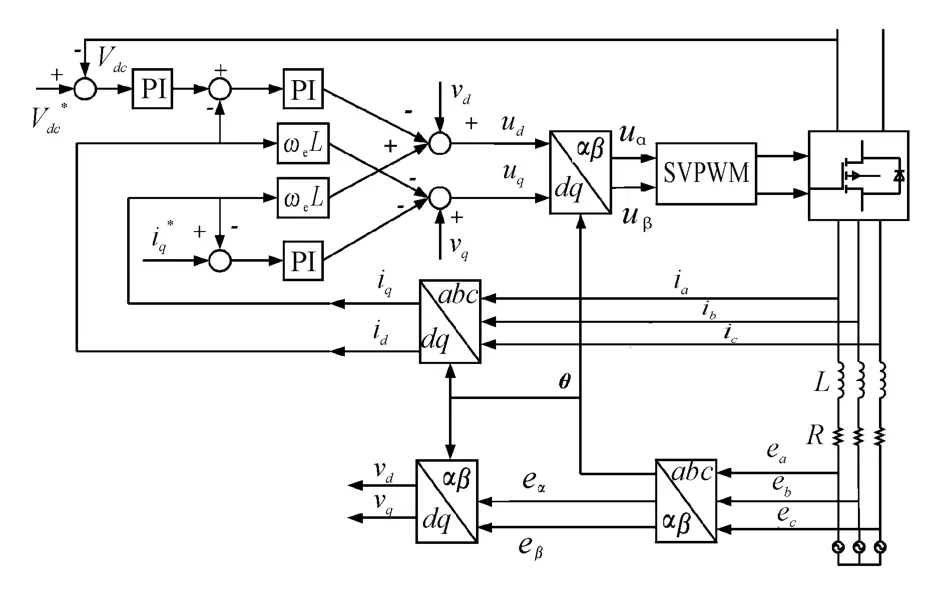
图7 风力发电系统网侧控制结构
3 风光储联合发电系统并网建模
3.1 储能系统
双向DC-DC变换器能够使储能端和负载端的电压稳定不变,同时保持变换器两端的电压极性不变。通过调节变换器电流流向,使电流能够双向流动,从而实现能量反向,使变换器双向工作。采用控制2个电力MOSFET(power MOSFET)的开通和关断的方式,实现能量的双向流动,并通过并联直流母线电容来减小电压波动。
蓄电池恒压充电采用电流电压双闭环控制,双闭环控制数学模型如式(10)、式(11)所示。电流闭环控制为
式中:Uref(s)是电流控制器的输出电压;Kpc和Kic分别是电流控制器的比例和积分增益;Iref(s)是设定电流值;I(s)是实际电池的输出电流。电压闭环控制为
式中:Iref(s)是电压闭环控制器的输入参数;Kpv和Kiv分别是电压控制器的比例和积分增益;Uref(s)是设定电压值;U(s)是实际电池的输出电压。
3.2 风光储联合发电系统并网建模
风光储联合发电系统整体结构如图8所示。对各个部分提出的控制策略进行仿真验证,建立风光储联合发电系统并网模型。

图8 风光储联合发电系统结构
仿真模拟某风光储联合发电设备并网供电,在标准测试条件(温度25℃,辐照度1 000W/m2)下,当地空气密度为1.2 kg/m3,风速为12 m/s,当t=1 s时,风速变为11 m/s,辐照度变为900W/m2。该联合发电设备中光伏阵列的最大功率为213.15W,并联数为10,串联数为70,风力机叶片直径为28 m,蓄电池初始容量为80%。并网相间电压为690 V,频率为50 Hz,根据当地用户用电负载情况,规定恒功率并网目标值为370 000 W,设定仿真时间为2 s。光伏发电系统、风力发电系统和储能系统的仿真模型如图9—图11所示。
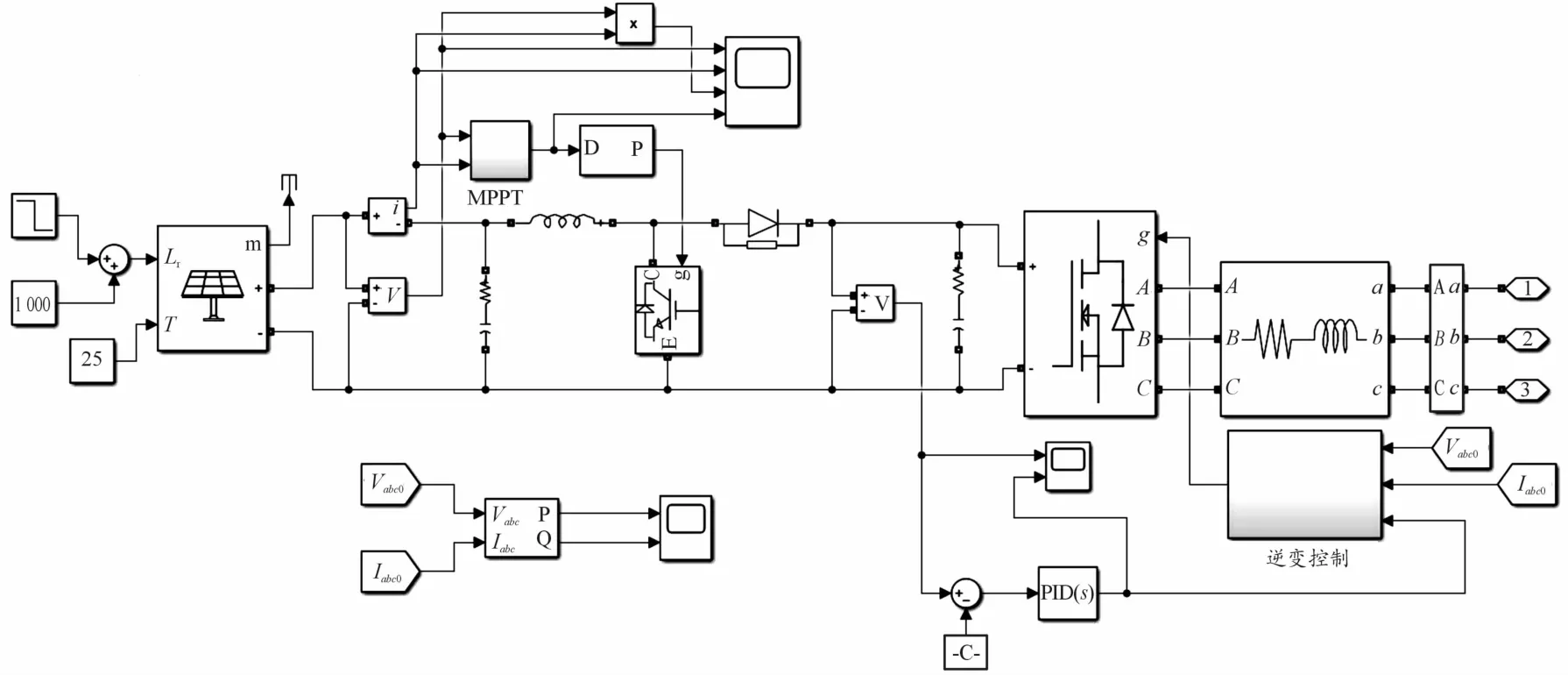
图9 光伏发电系统仿真模型结构
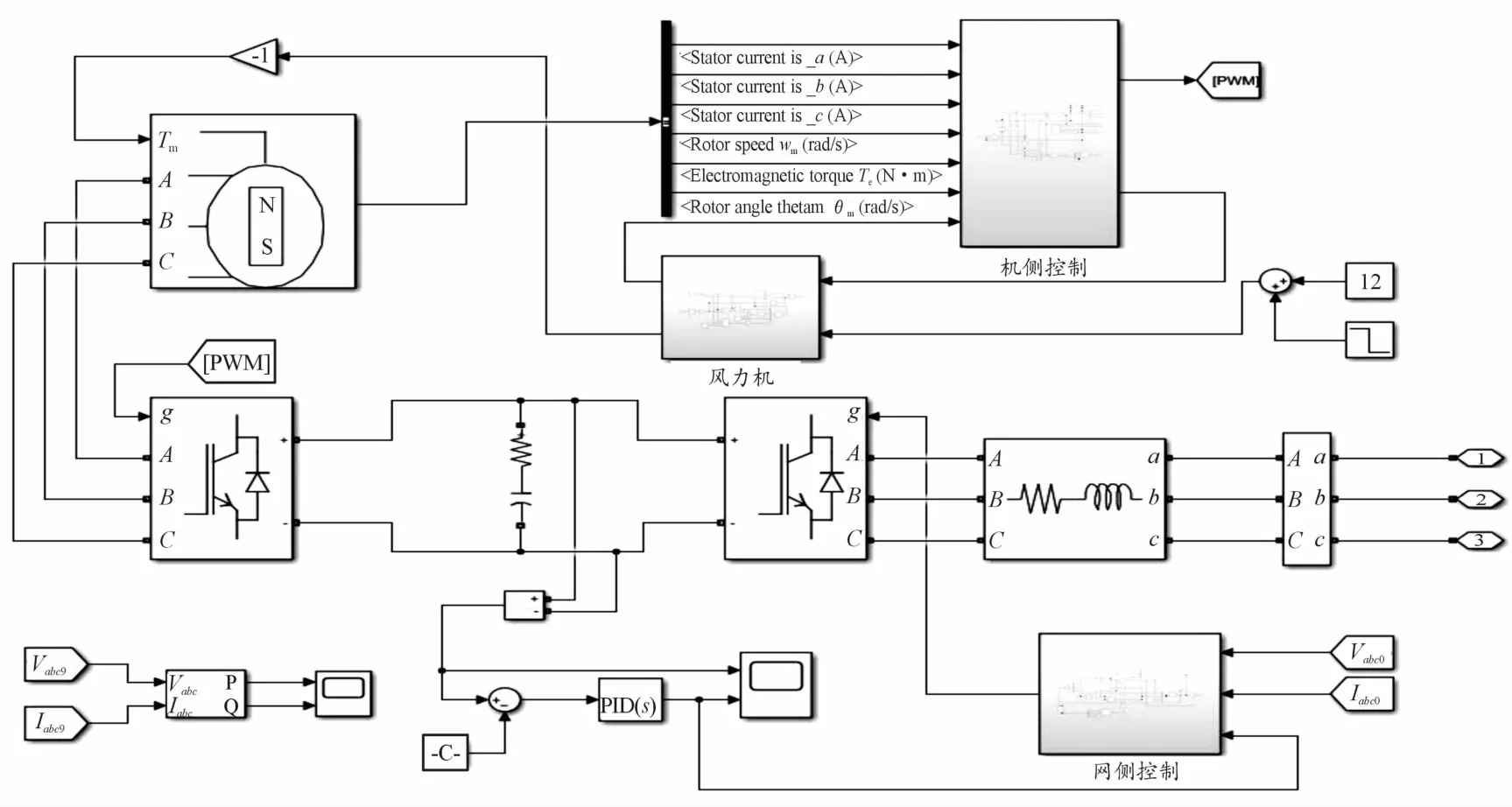
图10 风力发电系统仿真模型结构
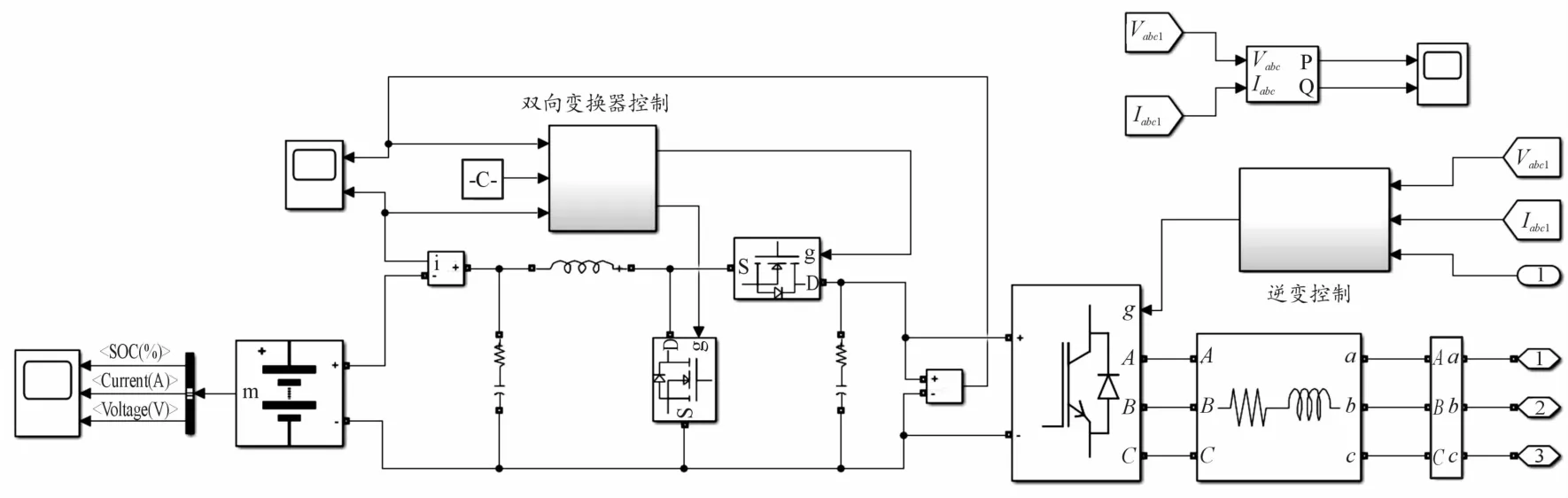
图11 储能系统仿真模型结构
4 仿真结果分析
对风光储联合发电系统进行仿真,仿真结束后,得到光伏阵列和风力机的输出功率,如图12、图13所示。
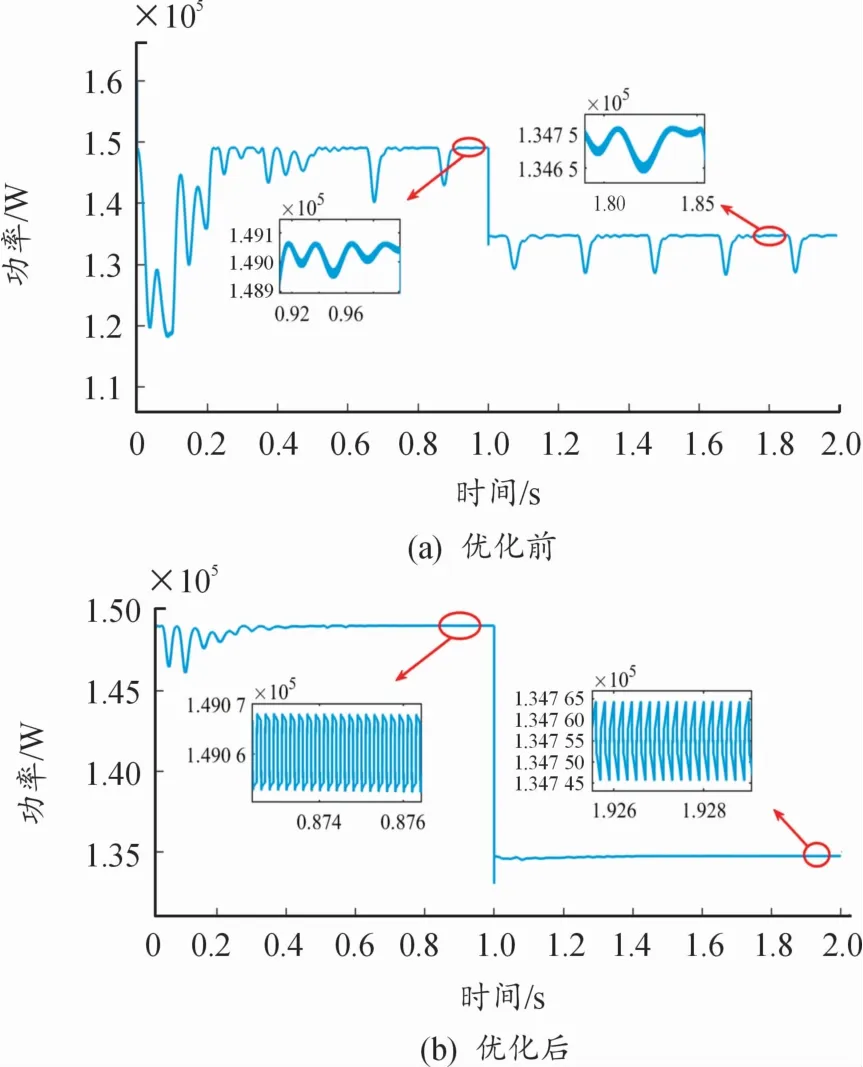
图12 光伏阵列输出功率
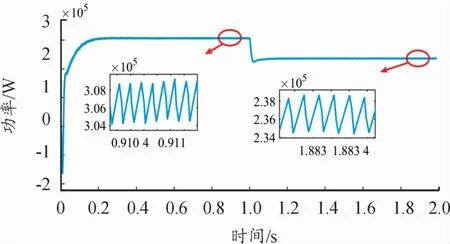
图13 风力机输出功率
图12(a)为改进模糊控制扰动观察法的输入量与隶属度函数之前光伏阵列的输出功率,1 000 W/m2和900 W/m2辐照度条件下追踪到的最大功率分别为149 000W 和134 750 W;图12(b)为改进后追踪到的最大功率,分别为149 060 W 和134 755W。由图1可知,该条件下光伏阵列输出最大功率点分别为149 006W 和134 750 W,优化前后追踪结果均与理论值误差极小,而优化后的功率曲线在仿真初期达到稳定状态更快,且寻得最大功率点后的功率输出更平稳,波动范围更小。
由图13可知,在12 m/s和11 m/s的风速条件下,机侧功率输出分别为307 000 W 和236 000W。
仿真结束后,得到并网模式下的光伏发电系统、风力发电系统和储能系统向电网输出的功率,仿真结果如图14所示,其中储能系统输出功率小于零时蓄电池组充电,大于零时蓄电池组放电。由图12—图14可得本次实验各个系统输出功率的数据,如表2所示。
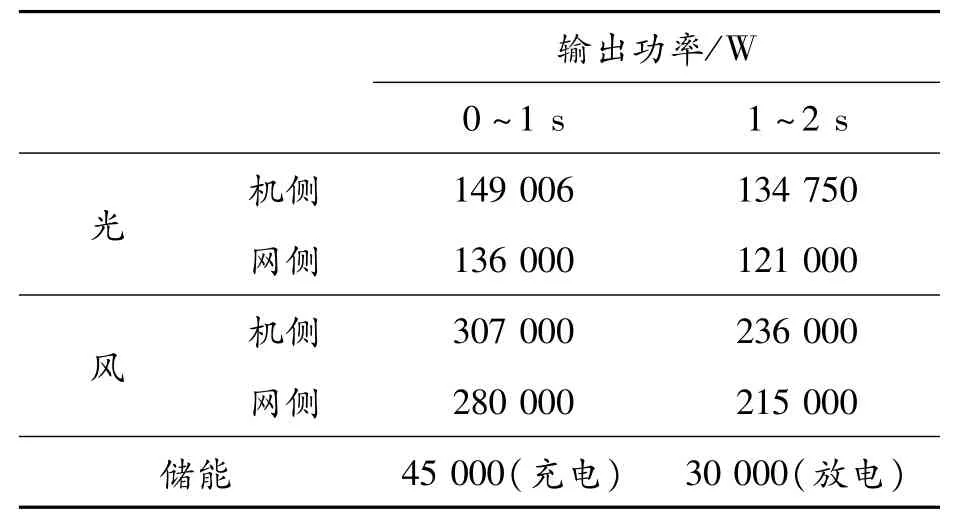
表2 风力、光伏发电系统和储能系统的输出功率
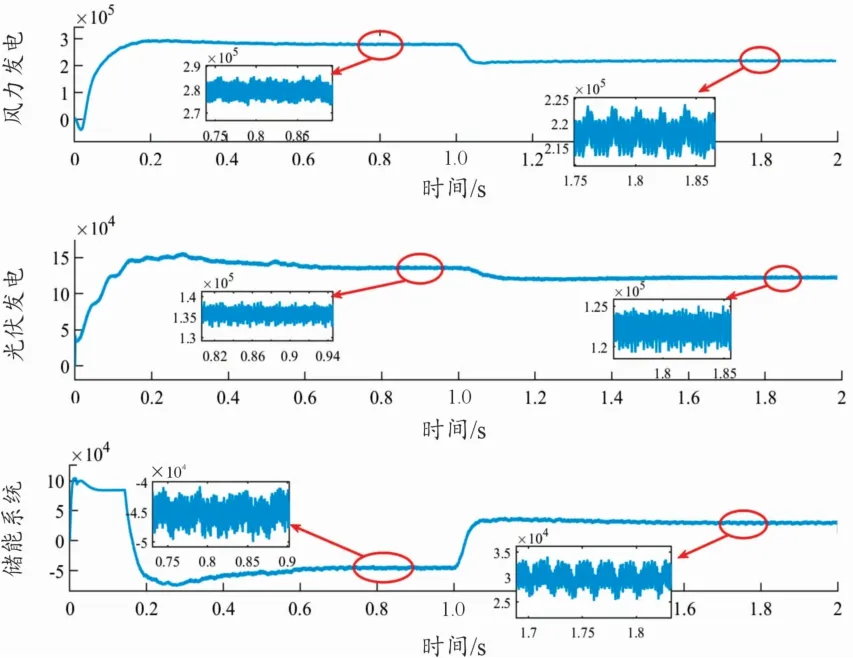
图14 风力、光伏发电系统和储能系统的输出功率
经计算,光伏发电系统逆变效率分别为91.27%和89.79%,风力发电系统逆变效率分别为91.21%和91.10%。
蓄电池荷电状态如图15所示。仿真时间初始0.2 s内,由于风力发电系统和光伏发电系统的启动时间内输出总功率不满足并网功率需求,需要蓄电池放电,此时3个系统同时向电网送电。当光伏阵列和风力机输出达到最大功率点时,光伏发电系统和风力发电系统的总发电功率超过并网功率需求,系统富余电力,蓄电池充电。当到达仿真时间1 s时,发电总功率低于并网功率需求,蓄电池放电。
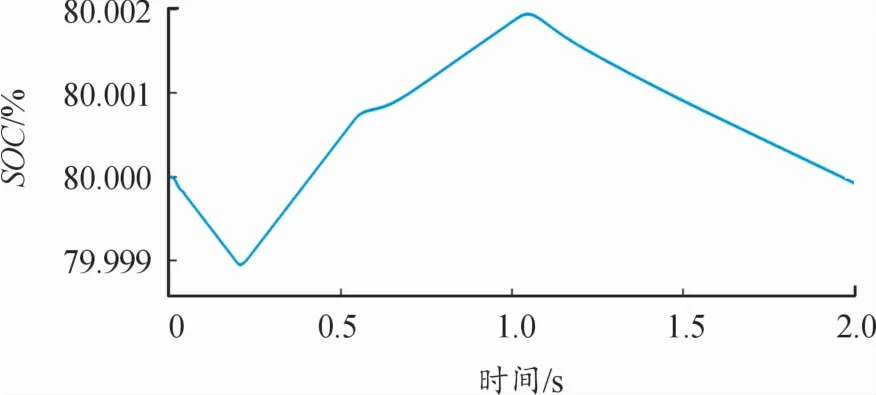
图15 蓄电池荷电状态曲线
并网有功功率、无功功率和并网电流的仿真波形如图16所示。实际有功功率在初始0.2 s内波动后保持在并网目标值370 000 W 左右,且在仿真时间1 s,外部环境条件改变的情况下依然保持在目标值左右,保证了并网电能质量的安全稳定;无功功率经初始大范围波动和环境条件改变的大范围波动之后,均保持在较低值,尽可能保证送电过程中损耗最小,电流幅值稳定在440 A左右。本次仿真对并网电流进行了快速傅里叶变换分析,分别选取仿真时间0.7 s(环境变化前)的一个周期和仿真时间1.5 s(环境变化后)的一个周期,基频为50 Hz,谐波失真率分别为0.83%和0.92%,均低于5%,达到了并网要求。
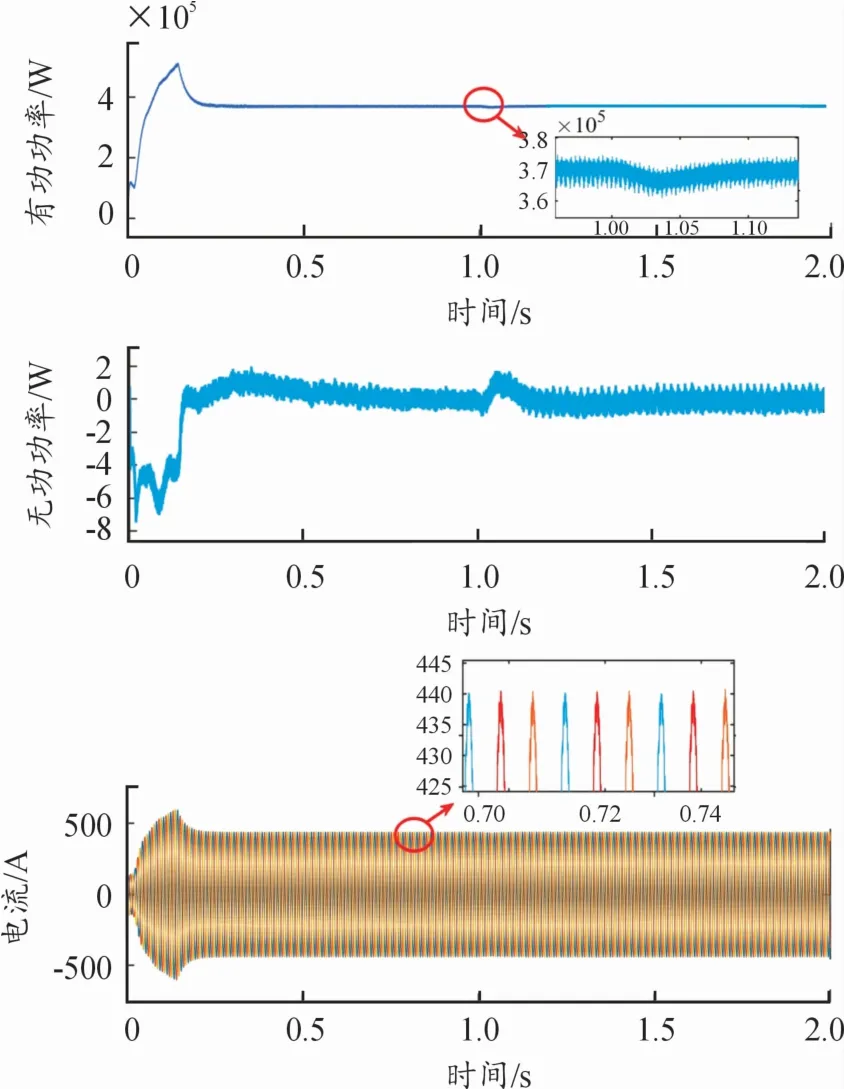
图16 并网状态下的有功功率、无功功率和电流曲线
5 结论
1)光伏发电系统输出功率的稳定性受辐照度变化影响,传统控制方法对输出功率稳定性有一定提升,但提升幅度有限,且牺牲了部分对最大功率点的追踪效果。
2)经改进后的模糊控制方法优化后,新型扰动观察法在应对辐照度波动的情况时,功率输出波动幅度小,同时保证了最大功率点的追踪效果,相较于传统控制方案具有优越性。
3)将改进后的扰动观察法应用到风光储联合发电系统中,进行并网仿真,达到了并网功率需求和我国并网要求,优化后的光伏发电系统输出稳定性明显提升,再次验证了提出控制方案的可行性和优越性。
猜你喜欢
河北理科教学研究(2020年2期)2020-09-11
电子测试(2018年13期)2018-09-26
新校长(2018年7期)2018-07-23
电源技术(2017年1期)2017-03-20
风能(2016年8期)2016-12-12
电源技术(2015年7期)2015-08-22
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年11期)2015-04-09
电测与仪表(2015年22期)2015-04-09
航天器工程(2014年4期)2014-03-11