大长径比远程制导火箭弹自适应Super-twisting 控制方法
2024-03-20 00:37范军芳闫华杰唐文桃赵国宁
中国惯性技术学报 2024年2期
范军芳,闫华杰,纪 毅,唐文桃,赵国宁
(1.北京信息科技大学 自动化学院,北京 100192;2.高动态导航技术北京市重点实验室,北京 100192;3.北京自动控制研究所,北京 100074)
大长径比远程制导火箭弹采用短时大推力火箭发动机,用于远程大跨域点目标精准打击任务,具有有效射程远、作战效费比高、灵活部署、机动性强等诸多优势。其在执行远程纵深目标打击时,由于气动参数摄动、外部干扰及自身结构等特点,其飞行动压、攻角等大范围波动,飞行包络增大,放大了参数非线性、不确定性及多通道耦合等复杂特性,显著影响了射程、制导精度、姿态控制等性能[1]。为此,亟需研究具有对不确定性强自适应的大长径比远程制导火箭弹姿态控制技术。
比 例-积 分-微 分(Proportion-Integration-Differentiation,PID)方法作为一种经典的控制方法,通过对系统过去(积分环节)、现在(比例环节)、未来(微分环节)的状态进行综合评估,规避了系统动力学特征对控制效果的不利影响,故广泛应用于包括远程制导火箭弹控制系统在内的多种飞行器系统中[2]。然而,PID 参数设计与调节依赖于工程师的经验,对强时变扰动适应性差,影响在复杂气动环境中的控制效果。为提升PID 控制器的扰动抑制能力和进一步扩展其应用范围,韩京清[3]提出了一种自抗扰控制理论,即通过“跟踪微分器(Tracking Differentiator,TD)+状态观测器(Extended State Observer,ESO)+反馈(Feedback,FB)”的控制结构强化PID 的控制效果。文献[4]将自抗扰控制应用于空中作业机器人飞行平台解决强噪声、扰动、参数不确定性控制问题,通过仿真实验验证了所提出的控制方法具有噪、扰抑制能力。文献[5]将自抗扰控制方法应用于导弹上升阶段的高精度姿态控制中,仿真结果表明其在气动参数不确定性和气流带来的扰动下具有较强的鲁棒性。虽然自抗扰控制方法在相应控制系统中得到了有效的应用。但仍存在参数选择、系统特性和计算资源难以满足实时控制等不足。
滑模控制(Sliding Mode Control,SMC)具有较强鲁棒性和抗扰动能力,已广泛应用于导弹姿态控制与自动驾驶仪设计等相关领域[6,7]。文献[8]将SMC 与反步法结合,应用于滚转弹的弹道跟踪问题中,有效应对了滚转弹的参数不确定性与执行器饱和问题。文献[9]针对一类具有匹配不确定性和扰动的二阶非线性系统,设计了一种具有快速固定时间收敛特性的非奇异终端滑模控制方法,收敛速度较快,能量消耗低,具有较好的控制品质。
SMC 虽然具有强鲁棒性且一定程度能使系统在有限时间内收敛,但仍存在高频大幅振颤、执行机构时滞等现象,降低了远程制导火箭弹能效比、甚至诱发执行机构失效。文献[10]设计了Super-twisting 阻抗控制策略,其可有效地抑制普通滑模算法产生的抖振,但是需要已知干扰上界。为解决干扰上界未知的问题,文献[11]提出一种自适应Super-twisting 算法,具有无需确定干扰上界的优点,且可通过自适应因子加快收敛。文献[12]设计了一种基于增益自适应滑模控制的姿态控制,基于Super-twisting 算法设计了有限时间收敛的姿态控制器,有效抑制了滑模控制中的抖振情况。文献[13]针对飞行过程中弹道跟踪的控制问题,结合自适应Super-twisting 算法设计了基于状态偏差的跟踪控制器,通过仿真验证了存在初始状态误差下滑模弹道跟踪方法的有效性和可行性,但只针对刚体运动做了建模仿真,并没有考虑弹性模态的影响。相关研究表明,当旋转飞行器的长径比大于15 时,须考虑飞行器弹性模态的影响[14]。
本文针对具有轻质薄壳结构的大长径比远程制导火箭弹刚体-弹性体耦合动力学控制难题,提出了一种自适应Super-twisting 控制方法。首先,将大长径比远程制导火箭弹的弹性模态和不确定干扰项视为扰动,构建了考虑刚体-弹性体耦合与气动参数不确定性的动力学模型。其次,针对飞行过程中的干扰问题,设计了有限时间收敛扰动观测器,以实现对扰动的实时精确估计。同时,在扰动上界信息未知的情况下,设计了参数自适应因子以提升控制器对不确定性的自适应能力。通过构造Lyapunov 函数分别证明了控制器与观测器的稳定性与有限时间收敛特性。最后,通过仿真对比实验验证了本文所提控制方法的有效性与优越性。
1 远程制导火箭弹刚弹性动力学模型
纵向平面内,大长径比远程火箭弹动力学模型构建如下[14]:
式(1)中:α为攻角,为攻角速率,γm为弹道倾角,θ为俯仰角,为俯仰角速率,m为火箭弹质量,Vm为弹体速度,g为重力加速度,ωz为俯仰角速率,为俯仰角加速率,Jz为转动惯量,L与M分别表示气动力与气动力矩为动压,ρ为大气密度,s为特征面积,l为特征长度,δz为舵偏角为气动力学系数。火箭弹各姿态角度如图1所示。
图1 远程制导火箭弹姿态角度关系示意图Fig.1 Relationship of long-range guided rocket’s attitude angles
考虑到气动参数辨识过程中的不确定性,将上述动力学参数可拆分为名义部分与不确定部分:
大长径比运动体的弹性模量动力学表达式如下:
结合式(1)与式(4),考虑弹性效应的气动力与气动力矩可表示如下:
令x1=γm,x2=θ,x3=ωz,有以下动力学模型:
将式(2)(4)(5)代入式(6)后整理为状态空间的形式,有如下形式:
假设1.存在两个常数D1,max和D3,max,使得不等式恒成立。
大长径比远程制导火箭弹的控制目标可表述为:考虑式(6)所示动力学模型,在考虑弹性运动与系统建模误差的条件下,设计等效执行机构指令δz,使制导火箭弹的实际弹道倾角γm实时跟踪制导系统计算的弹道倾角指令γmd。控制系统设计流程图如图2 所示。

图2 远程制导火箭弹控制系统框图Fig.2 Block diagram of a control system for a remotely guided rocket
2 有限时间收敛扰动观测器设计
本节设计有限时间收敛观测器以实现对扰动项d1和d3的精确估计。首先设计降阶扰动观测器,并通过Lyapunov 方法分析其有限时间收敛性能。之后,将上述方法应用于系统(7)中。
引理1[16]:假设存在以下Lyapunov 函数V(t):R+→R+且满足:
那么,V(t)将在有限时间tf1之内收敛至0,则tf1满足:
式(10)中:α> 0,β> 0为设计参数,V(0)为V(t)的初值。进一步,若V(t)满足:
那么,V(t)将在有限时间tf2之内收敛至0,tf2满足:
式(12)中:a> 0,b> 0且0<c< 1为设计参数。
接下来设计降阶有限时间收敛扰动观测器。考虑如下一阶系统:
式(13)中:x为系统状态变量,f(x)为已知系统状态,b为系统输入增益,u为输入控制量,d为未知或不确定扰动。
假设2.存在常数dmax> 0使得恒成立。
为实现对系统扰动d的实时估测,引入新变量ħ=x-χ,其中χ∊R,按以下规律更新:
式(14)中:k1> 0,k2> 0,k3> 0为观测器增益,p与q皆为正奇数且满足p<q。
观测器(14)的特性可用以下定理表述。
定理1.对于一阶系统(13),设计以下非线性扰动估计器:
证明:选取如式(16)所示的Lyapunov 函数。
求式(16)的一阶时间导数,得:
进一步整理得:
由引理1 可知,Lyapunov 函数V1将在有限时间T1内收敛,且T1符合以下不等式关系:
由此可得,当t>T1时,V1=0恒成立。此时,由式(16)关于V1的定义可得,当t>T1时,ħ˙=0恒成立。由d~的定义可知:
进而可推得,当t>T1时,=0恒成立。证明完毕。
将观测器(14)应用于系统(7),则有:
则扰动d1和d3可按式(22)估计:
至此,可应用于考虑弹性效应的远程制导火箭弹有限时间收敛扰动观测器设计完毕。
3 基于Super-twisting 算法的自适应控制器设计与分析
3.1 自适应Super-twisting 控制器设计
假设t时刻制导系统所计算的弹道倾角指令为γmd(t),定义指令跟踪误差e1(t)=γm(t) -γmd(t)。定义滑模面s1=e1,对其求一阶时间导数,有:
视x2为控制量,同时以式(22)中估计值1替代扰动d1,设计式(25)所示的自适应Super-twisting 控制器:
式(25)中:α(t)和β(t)为自适应参数项,按式(26)所示更新如下:
式(26)中:α0> 0,β0> 0分别为α(t)和β(t)的初值,n> 0为一常数,L(t)设计为连续的自适应因子函数。据此,式(25)中的φ(s1,L)可表示为:
注1.当L(t)恒定不变时,(t)=0,进而φ(s1,L)=0,α(t)和β(t)均为固定常数。此时,式(25)退化为普通Super-twisting 控制器。
引理2(杨氏不等式)[16]:对于任意非负常数a,b∊R,当存在常数p,q∊R且满足时,以下不等式成立:
定理2.定义以下矩阵:
式(29)中:P为正定对角矩阵且满足p11> 0,p22>0且p12p21<p11p22。
假设自适应因子函数L(t)有界且始终满足其中L0为一常数在后,则当参数α0和β0满足PA+ATP+μP+PBBTP+CTC≤ 0时(μ> 0为一常数),滑模面s1会在自适应Super-twisting 控制器(25)的作用下于有限时间内收敛至零。
证明:引入如下中间向量:
则式(24)可改写为:
对式(30)求时间导数,得:
将式(31)代入式(32)中第一个等式,得:
进一步改写为:
定义如下Lyapunov 函数:
求式(38)的一阶时间导数,得:
由引理1 可得,V2将在有限时间T2内收敛,且T2符合以下不等式关系:
证明完毕。
3.2 自适应因子函数设计
定理2 成立的条件为L(t) >ma x {L0,f(t)},即L(t)应始终大于f(t)。本小节基于双层自适应方法设计自适应因子函数L(t),以满足上述条件[17]。
首先,参考等效控制方法,确定式(31)在理想滑模状态下的平衡点为[18]:
式(47)中:[sgn (s1(t))]eq为[ 0,t]时刻内符号函数sgn(s1)的平均值,可设计一阶低通滤波器估计:
式(48)中:τ∊ (0,1]为滤波器的时间常数。
据此,定义中间变量δ(t)为:
接下来,设计自适应因子函数L(t)为:
式(50)中:l0> 0为一常数,l(t)按式(51)更新:
式(50)中:n0> 0,κ> 0均为设计参数。
首先分析式(52)第一项,对δ(t)求一阶时间导数,得:
将式(54)代入式(52),得:
证明完毕。
3.3 反步控制器设计
本小节利用反步法设计舵偏角指令,以使得真实弹道倾角实时跟踪式(25)所示弹道倾角指令,进而使真实弹道倾角实时跟踪制导系统生成的弹道倾角指令。
令z1=x1,对其求一阶时间导数,得:
根据式(25),设计虚拟控制量:
设计虚拟控制量:
式(61)中:υ11> 0,υ21> 0,0 <υ31< 1均为设计参数。
据此,设计舵偏角指令为:
式(63)中:υ12> 0,υ22> 0,0 <υ32< 1均为设计参数。
定理4.对于上述系统,舵偏角控制律式(63)可以驱动系统状态z1,z2,z3在有限时间内收敛到零附近一个小区域。
证.对于上述反步法控制器构造如下Lyapunov函数:
故根据式(65)可以推出如下不等式:
由引理1 可知,Γ 在有限时间内到达并保持在零域附近。结合定理4 可知,V6也可以收敛到零附近的一个小区域,即证明完毕。
4 仿真与分析
4.1 仿真条件设置
本节通过大长径比远程制导火箭弹的弹道倾角指令跟踪仿真以验证所提算法的有效性。初始条件为Vm=785 m/s,γm=0°,θ=0°,ts=0.001s,T=20s。大长径比远程制导火箭弹各参数如表1 所示。
表1 火箭弹参数表Tab.1 Parameter Table of Rocket
弹道倾角指令为γmd=10sin(t/10)°。弹性模态的阻尼比和固有频率分别为ξ=0.03和ω=56[14]。引入舵偏角限制为了增加气动参数不确定性,式(2)中的动力学参数拉偏15%,不确定部分成高斯分布。自适应控制器参数设置为α0=0.2,β0=0.1,l0=0.08,n0=0.08,K=5,m=0.99,ε=0.05,τ=0.1。扰动观测器参数设置为k11=3,k21=0.01,k31=100,k13=3,k23=0.01,k33=100。反步控制器参数设置为v11=10,v21=50,v31=0.9,v12=10,v22=50,v32=0.9。
为验证所提方法的有效性,本文设计的自适应Super-twisting 控制器记为“AST”,同时用滑模反演鲁棒控制方法(SRC)[19]、有限时间收敛滑模控制器(Finite Time Convergence,FTC)[20]来进行对比仿真实验,其控制律分别为式(67)和式(68)。
其中,控制器参数k1=0.9,k2=0.1,ε=0.1,σ=0.1,ω=10,M=0.5。
式(68)中,控制器参数设置为k=0.04,p=0.4,q=1。
由于符号函数sgn(s)的存在可能引起颤振,为避免此情况的发生,使用以下Sigmoid 函数对符号函数做近似替代:
AST 涉及到的式(25)、FTC 涉及到的式(64)、反步法涉及到的式(61)和式(63)包含的符号函数sgn(s)使用sgmf(s)代替,参数设置为Ψ=0.001。
4.2 仿真结果分析
仿真结果如图3~图10 所示,图3 为弹道倾角控制指令与AST、FTC、SRC 三种控制器下的跟踪曲线,三者皆能成功跟踪指令信号。图4 为弹道倾角控制指令信号与跟踪信号的差值,由仿真结果可知AST 算法下火箭弹在飞行3.2 s 后收敛至0.002 邻域附近,而SRC 算法与FTC 算法分别在8.1 s、19.7 s 时才收敛至此邻域,且AST 算法下抖动更小,能更平稳、更精确地跟踪控制指令。

图3 弹道倾角跟踪Fig.3 Trajectory angle tracking

图4 弹道倾角跟踪误差Fig.4 Trajectory angle tracking error
图5 为控制舵偏角度,三种控制方法下控制舵偏角度均出现了初始阶段饱和、抖振现象,这是滑模控制方法的固有特性引起的结果。由于系统初始阶段弹道倾角跟踪偏差大,所需控制量大,导致出现初始阶段饱和现象。当控制器涉及的系统状态超过参考指令时,又会有相反方向的控制量,故出现抖振现象。值得注意的是,AST 与SRC 控制下的系统在0.8 s 时脱离了饱和控制状态,而FTC 在1.5 s 时才脱离。虽然AST 控制下执行机构在0.8~2.8 s 时出现小幅抖振,但保持了较低的频率(<10 Hz),对系统可靠性的影响较低。总的来说,AST 方法的控制输出与SRC 整体相当,但AST 在抖振阶段幅值更小。两者的控制输出都明显优于FTC 算法,比之更为平滑。

图5 舵偏角Fig.5 Rudder deflection angle
系统状态量曲线如图6~图8 所示,在三种控制方法作用下系统刚体运动状态量α、θ、ωz和弹性模态状态量η、η˙均能收敛到一定的稳定值,其中α、θ跟随弹道倾角指令规律变化,ωz在收敛至0.7 邻域后,缓慢向0 趋近,η˙收敛至0.01 邻域,这使得η在0.12邻域达到平稳后,缓慢向0 收敛。AST 控制下弹性模态振动较小,在0.5 s~2.5 s 时,振动幅值相比SRC 减少了35%,相比FTC 减少了10%。FTC 算法由于攻角收敛较慢、舵偏角饱和阶段相比其它2 种方法延长了1 s 的原因,弹性模态在收敛过程中出现了1 次较大波动,使得弹性模态收敛时间相比AST、SRC 算法慢了1.5 s 左右。
图6 攻角Fig.6 Angle of attack
图9 为由气动参数不确定性、弹性扰动带来的实际误差与扰动观测器的估计误差曲线,所设计的扰动观测器对上述误差做出了实时准确估计。图10 为AST自适应控制器的自适应参数变化曲线,最终收敛至11~13.5 范围内波动。

图9 状态观测器估计值Fig.9 State observer estimate
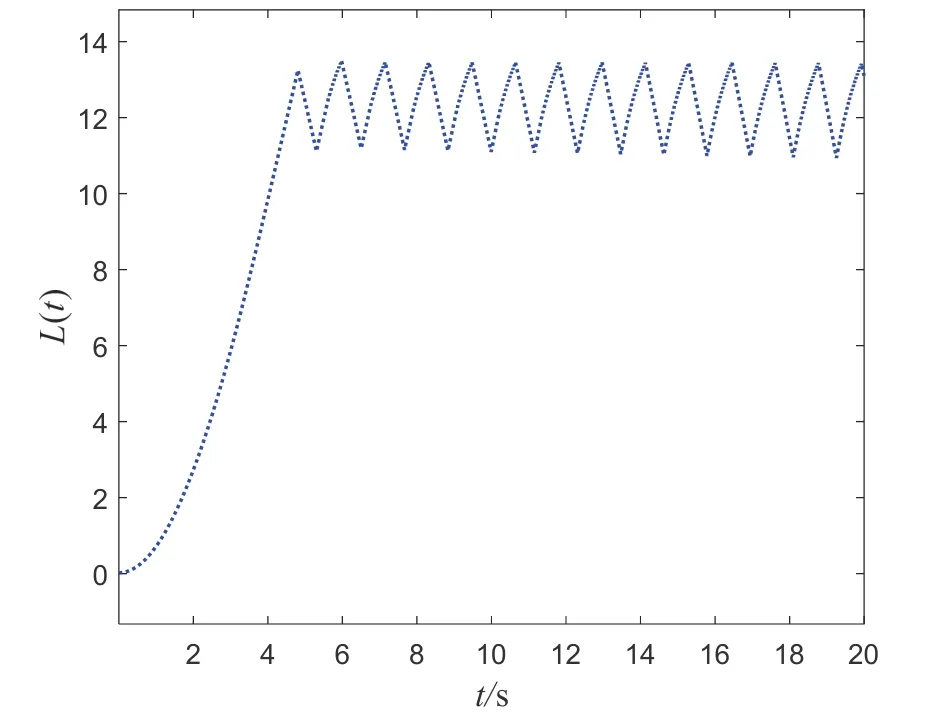
图10 Super-twisting 控制器的自适应参数Fig.10 Adaptive parameters of the super-twisting controller
5 结论
本文针对具有轻质薄壳结构的大长径比远程制导火箭弹刚体-弹性体耦合动力学控制难题,提出了一种具有有限时间收敛功能的自适应Super-twisting 控制方法,具有以下优势:
1)将弹性模态与外部干扰项视为和归一化扰动,建立了考虑参数、模型不确定性的大长径比远程制导火箭弹刚体-弹性体耦合动力学模型。
2)设计有限时间收敛扰动观测器,以实现对扰动的实时精确估计。在扰动上界信息未知的情况下,设计了参数自适应因子自动调节控制参数以提升控制系统的鲁棒性与自适应能力。
3)仿真实验表明,本文所提控制方法能够使大长径比远程制导火箭弹实现对弹道倾角指令的精确跟踪。在弹体±15%气动参数摄动的条件下,由平飞状态转变为跟踪幅值为10 的正弦弹道倾角指令时,实现3.2 s内弹道倾角跟踪误差收敛至 0.002 °。相比于文献[19][20]的方法,本文所提方法响应过程平稳快速,同时能够有效抑制弹性模态和外部干扰给姿态控制带来的不良影响。
猜你喜欢
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
太空探索(2014年1期)2014-07-10
电测与仪表(2014年11期)2014-04-04