
基于多种机器学习模型的夏季北冰洋海雾卫星检测方法研究
2024-03-25 12:33付玉琴衣立黎梦雅程雪盈
海洋气象学报 2024年1期
付玉琴 衣立 黎梦雅 程雪盈

摘 要 利用2014—2018年6—9月Aqua/MODIS提供的光譜数据、海面温度数据及其他辅助数据,基于CALIOP L2 VFM产品中云底高度提取的海雾、云和海表标签,建立3类样本数据集。结合使用K折交叉验证法、网格搜索法和粒子群优化算法训练随机森林(random forest,RF)、支持向量机(support vector machine,SVM)、多层感知机(multilayer perceptron,MLP)和全卷积神经网络(fully convolutional network,FCN)4种不同的机器学习模型,对比模型在北冰洋夏季海雾检测中的表现。结果显示,RF、SVM、MLP和FCN均表现出一定的海雾检测能力,检出率(probability of detection,POD)均超过70%。其中,FCN表现出最稳健的综合性能,POD达到79.91%,虚警率达到较低的24.90%,关键成功指数达到63.17%。
关键词 北冰洋;海雾检测;卫星;机器学习
中图分类号:P47;TP181文献标志码:A文章编号:2096-3599(2024)01-0014-10
DOI:10.19513/j.cnki.hyqxxb.20231004001
收稿日期:2023-10-04;修回日期:2024-01-08
基金项目:国家重点研发计划项目(2019YFC1510102);国家自然科学基金项目(U2342214,41975024)
第一作者简介:付玉琴,女,硕士研究生,主要从事海雾卫星遥感研究,fuyq36@163.com。
通信作者简介:衣立,男,博士,副教授,主要从事海雾和低云卫星检测相关研究工作,yili@ouc.edu.cn。
Summer sea fog detection over the Arctic Ocean based on satellite data using several machine learning models
FU Yuqin1,2, YI Li1,2, LI Mengya3, CHENG Xueying4
(1. Frontiers Science Center for Deep Ocean Multispheres and Earth System, Ocean University of China, Qingdao 266100, China; 2. College of Oceanic and Atmospheric Sciences, Ocean University of China, Qingdao 266100, China; 3. PIESAT Information Technology Co., Ltd., Beijing 100195, China; 4. Systems Engineering Research Institute of China State Shipbuilding Co., Ltd., Beijing 100094, China)
Abstract Utilizing the spectral data, sea surface temperature, and other auxiliary data provided by Aqua/MODIS between June and September from 2014 to 2018, three categories of sample datasets are established, in which samples are labled as sea fog, cloud, and sea surface based on the cloud base height extracted from CALIOP/VFM. Combining K-fold cross-validation, grid search, and particle swarm optimization techniques, 4 different machine learning models are trained, including random forest (RF), support vector machine (SVM), multilayer perceptron (MLP), and fully convolutional networks (FCN). The performance of these models in the summer sea fog detection over the Arctic Ocean is compared. The results show that RF, SVM, MLP, and FCN all exhibit some capability of sea fog detection, with probability of detection (POD) exceeding 70%. Among them, FCN shows the best overall performance, achieving a POD of 79.91% and a low false alarm rate (FAR) of 24.90%, resulting in a critical success index (CSI) of 63.17%.
Keywords the Arctic Ocean; sea fog detection; satellite; machine learning
引言
随着全球变暖,海冰融化,北冰洋开阔水域呈明显增加趋势[1],北極航道在夏季甚至全年都可以通航。夏季是北冰洋海雾高发季节[2],海雾的发生频率高达36.3%[3]。海雾导致海上或沿海能见度降低,严重影响北冰洋沿海的生产生活、航道运输甚至导致船舶被海冰围困等事故发生[4-5]。因此,对北冰洋海雾的及时监测十分重要。
海洋上观测站点稀少且分布不均,卫星遥感具有高时空分辨率的优势,成为海雾检测的重要手段。传统上,利用雾/低层云在中波红外与长波红外通道的辐射差异,采用双通道差值法[6-9]来检测夜间雾。也有许多研究采用辐射传输模式[10-12]或统计方法[13-17]分析海雾在不同波段的辐射特征,设定辐射阈值进行海雾的检测。除此之外,海雾检测方法也趋向以阈值法为基础的多元化发展。刘希等[18]结合像元空间一致性检测法和红外亮温阈值法检测中国东部沿海雾。Zhang等[19]分析云雾在垂直结构上的差异,结合海面温度,采用动态阈值法检测中国近海雾。何月等[20]采用分级判识太阳高度角阈值和归一化大雾指数方法检测浙江省及周围大雾。Yi等[21]利用云顶温度与下垫面温度的差异,通过阈值法检测楚科奇海和波弗特海附近的海雾。Xiao等[22]使用逐级判断法,结合多个通道的辐射阈值和纹理特征分离格林兰海附近的海雾。然而,海雾和低云在光学遥感影像上表现相似[23],选择合适的阈值范围检测海雾是难点。不仅如此,极地地区常年存在海冰和积雪,其在可见光波段与云雾相似[24],且极地地区太阳高度角低,遥感光谱测量误差大[25]。这些复杂的环境更增加了获取北冰洋海雾检测阈值的难度。
机器学习方法可以自主学习特征与类别之间复杂的非线性关系,不依赖特定值完成分类任务。通过自动提取海量数据与雾之间的非线性关系,机器学习方法被逐渐应用于雾检测研究当中[25-33]。在各种机器学习方法中,支持向量机(support vector machine,SVM)能够用小样本数据集实现较高精度分类[33],但对于大样本数据集,则需要大量时间成本[34]。而随机森林(random forest,RF)可以高效学习大样本数据集[26]。神经网络模型多层感知机(multilayer perceptron,MLP)含有的隐藏层结构可以提取更抽象化的特征[34]。此外,全卷积神经网络(fully convolutional network, FCN)还能提取图像的纹理特征[25,27-28]。为更好地开展北冰洋海雾检测工作,对SVM、RF、MLP和FCN等4种机器学习模型在北冰洋夏季海雾检测中的表现进行了评估。
1 数据与方法
1.1 数据及预处理
使用搭载于Aqua卫星的MODIS数据(MYD021KM、MYD03和MYD06_L2)制作样本特征。MODIS具有36个波段,光谱范围为0.4~14.4 μm,扫描幅宽2 330 km,每5 min生成1个数据文件,1~2 d即可覆盖全球。根据云、雾、冰雪的特征差异,如表1所示,利用MYD021KM提供的通道1(0.62~0.67 μm,R1),通道20(3.66~3.84 μm,B20),通道26(1.36~1.39 μm,R26),通道31(10.78~11.28 μm,B31)的光谱数据,MYD06提供的海面温度(sea surface temperature,SST)数据以及MYD03提供的太阳天顶角(solar zenith angle,SOZ)数据,构建5个样本特征:R1、R26、B20-B31、B31-SST和SOZ。数据的空间分辨率为1 km×1 km,可在网站https://ladsweb.modaps.eosdis.nasa.gov/search/下载。
使用搭载于CALIPSO卫星的CALIOP二级垂直特征掩模产品(vertical feature mask,VFM)制作样本标签并检验模型的海雾检测效果。VFM数据(https://asdc.larc.nasa.gov/data/CALIPSO/)利用532 nm波段的后向散射系数提供云和气溶胶在大气层中的垂直分层[36],常用于海雾标签制作和海雾检测结果的检验[21-22,37-38]。所用VFM数据的水平分辨率为5 km,垂直分辨率为30 m,把从最底层(-20 m)向上检测到的第一个云点的高度作为云底高度,若在第一个高度范围内(即-20~10 m)检测到云,则标签为海雾[37],若检测到的云底高度大于10 m则标签为云,无云场景标签为海表(包括开阔水海表和冰雪覆盖海表)。值得注意的是,由于MODIS接收大气层整层的大气辐射,无法获得不同高度的精确辐射信息,本文用单层云(雾)做样本。
1.2 样本数据集
CALIPSO和Aqua同为A-train(沿同一轨道运行,各種仪器几乎同步观测的卫星星座)系列卫星,过境时间相差约73 s,2018年9月CALIPSO卫星轨道下降,二者不再同步观测。为了充分匹配卫星数据,以2014—2018年北冰洋(65°~90°N)夏季(6—9月)数据制作样本数据集。样本数据集由样本特征和样本标签组成,其制作流程如图1所示。依据预处理VFM得到的海雾、云和海表分类标签,采用最小球面距离,将各样本点标签匹配到最近时刻的MODIS图像上,并提取该点的样本特征,建立第一个数据集(Dataset 1,D1),可用于RF、SVM、MLP训练。由于CALIPSO卫星扫描幅宽很窄,D1在水平空间分布呈“线”状,无法满足FCN要求的二维空间数据输入。因此,采用区域增长方法[28],对于连续10个以上同类样本点的区域,以样本点所处卫星轨迹线为中心垂直线,往两侧进行该类别的区域增长,增长范围与该类样本连续点数相等,再通过中心裁剪获得适用于FCN模型训练的大小为64像素×64像素的数据集(Dataset 2,D2)。根据该方法获得的海雾、云、海表样本数量分别为3 165、3 289、3 106张。为了避免不同类别样本数量的不平衡对模型训练产生影响[39],对D2中海雾、云样本随机抛弃,最终D2中的3类样本数量均为3 106张。为了减小D1与D2的差异,D1只保留用于扩增的样本点,最终D1中的3类样本点数量均为198 784个。
训练模型时,2个数据集的样本特征均进行z-score标准化处理,使每个特征呈正态分布,加快模型训练时的收敛速度。数据集的80%被划分为训练集和验证集,用于模型训练及参数调整,剩下的20%作为测试集,全程不参与训练过程,用于评估模型的分类表现。
1.3 方法
1.3.1 机器学习模型
采用4种机器学习模型,包括随机森林(RF)、支持向量机(SVM)、多层感知机(MLP)和全卷积神经网络(FCN),区别如表2所示。RF是一种由大量决策树构成的集成机器学习算法[40],不同决策树选择样本的不同特征进行分支生长,由此训练大量决策树,预测结果为决策树投票最多类别。SVM是在统计学习理论的基础上发展起来的[41],模型的建立是寻找最大间隔分割平面的过程,使模型最大限度地区分多类数据。对于非线性数据,SVM使用核函数[42-43],将低特征维度的线性不可分数据转为高特征维度的线性可分数据。MLP是一种神经网络模型,利用误差反向传播算法,反向求导每层网络的误差调整每一层权重[44]。MLP由输入层、若干隐藏层和输出层组成,隐藏层中加入Tanh[45]或Relu[46]等激活函数,使模型具备非线性表达能力。隐藏层可以拟合任何非线性函数,但不断增加其层数可能出现训练过拟合问题,导致实际效果不佳,同时也会增加训练难度,使模型难以收敛,因此MLP使用一层隐藏层。
FCN是一种图像机器学习模型,由卷积神经网络(convolutional neural network,CNN)发展而来。CNN考虑到相邻像素间的空间相关性和纹理特征[47],通过多层隐藏层(卷积层)对图像进行特征提取,再通过全连接层和分类层对图像进行分类。FCN[48]在CNN如ResNet、VGG16、AlexNet等模型的基础上,去掉全连接层和分类层,换为反卷积层进行上采样,获得图像的逐像素分类。以含有13层卷积层的VGG16为基本骨架,采用Shelhamer等[48]提出的含有跳跃结构(skip architecture)的FCN模型,建立海雾检测模型。
1.3.2 参数优化方法
在训练模型之前,需要设定一些参数。参数的不同取值将影响模型训练的速度和精度。许多研究[26,49]使用经验法或网格搜索法选择模型参数,但经验法容易陷入局部最优,网格搜索法不适用取值范围大且连续的参数。为高效找到最优参数组,结合使用K折交叉验证法[50]、网格搜索法和粒子群优化算法,帮助模型在参数空间中找到最佳组合。
K折交叉验证法是指随机选取数据集80%的样本,平均分成K份,每次取不同的一份作为验证集,其余作为训练集。如此重复K次实验,得到K次实验中验证集的准确率,取K个数的平均值代表模型该套参数的得分。交叉验证法不仅能充分利用训练数据,还是防止模型过拟合,提高模型泛化性能的有效方法。RF、MLP和FCN模型的全部训练过程均采用十折交叉验证法,SVM由于建模时间较长,采用五折交叉验证法。
网格搜索法[49]是指对于需要优化的N个参数,把它们投射到N维空间,根据每个参数取值范围和步长划分为网格,遍历网格的所有交点。当参数步长足够小时,网格搜索更容易找到全局最优解,但同时也意味着需要花费更多的时间和计算资源。对于文中参数较少且参数为离散值的情况(如RF、MLP的参数和FCN模型的部分参数),采用网格搜索法确定。
粒子群优化(particle swarm optimization,PSO)算法[51]把变量寻优问题设想成一群粒子在参数空间搜寻最佳位置的过程。通过记录每个粒子和粒子群历史经过的表现最佳位置,来更新每个粒子下一次的位置和速度[52]。PSO算法同时考虑了单个粒子和群体粒子的位置信息(信息共享),适合用来加快确定具有连续取值的参数,此处SVM参数和FCN学习率参数采用PSO算法确定。
1.3.3 评价指标
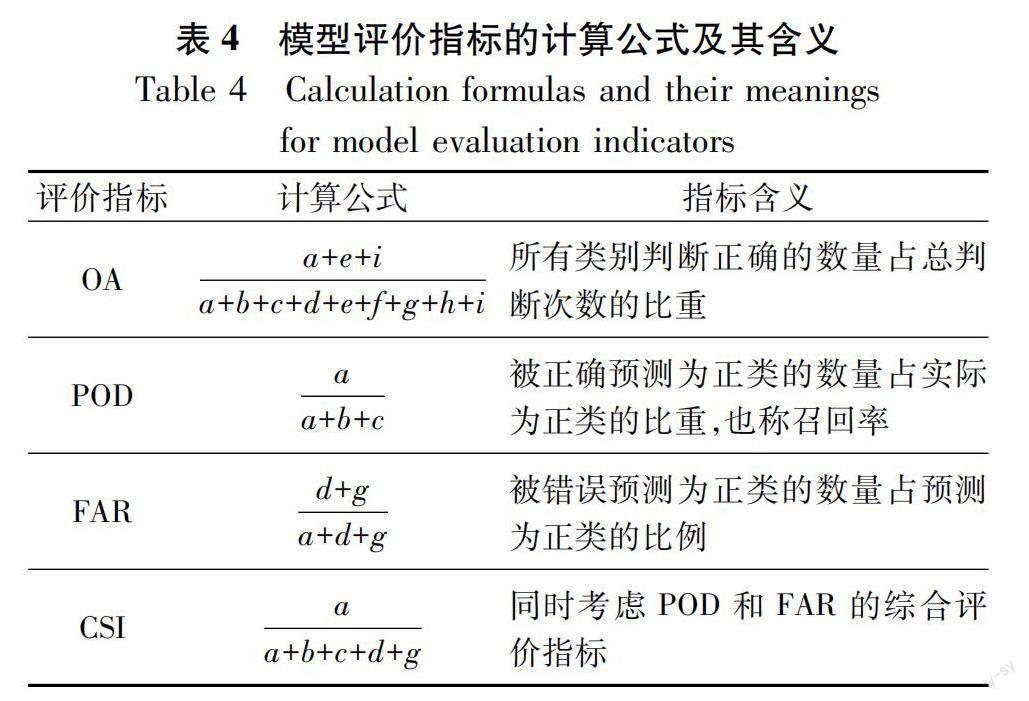
为了评估模型的分类性能,需要将测试集的特征输入训练好的机器学习模型,生成预测分类。以3类样本为例,根据预测分类与真实标签的比对,分为以下9种情况,不同情况下的样本数分别记为a~i,如表3所示。根据混淆矩阵[53-54],使用总体准确度(overall accuracy,OA)、检出率(probability of detection,POD)、虚警率(false alarm rate,FAR)、临界成功指数(critical success index,CSI)定量评估模型的分类表现,其计算公式和含义如表4所示。
2 模型训练及优化
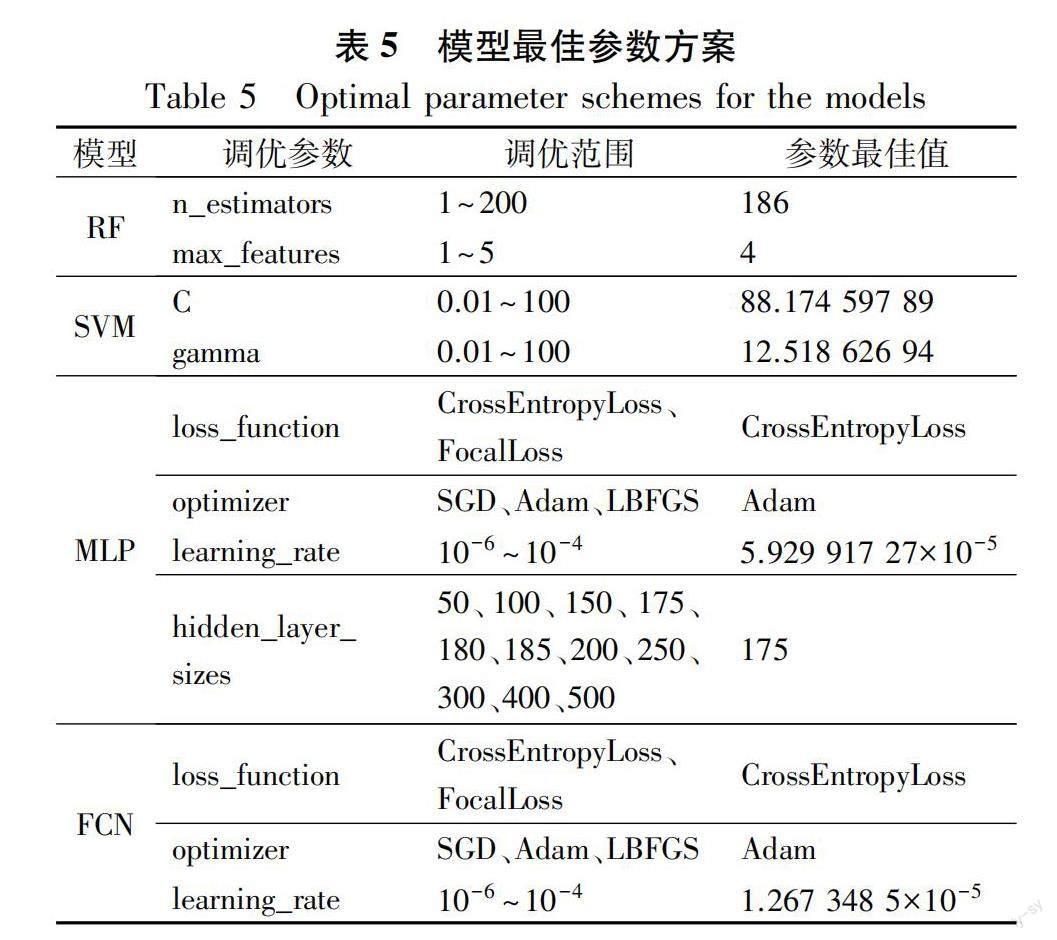
制作2个数据集,D1用于训练RF、SVM和MLP,D2用于训练FCN。结合使用不同参数优化方法优化模型关键参数,确定4种模型最终参数方案,结果如表5所示。
影响RF分类精度的有2个关键参数,分别是决策树的数量(n_estimators)和决策树节点分枝时随机选取特征的数量(max_features)[49]。利用网格搜索法,结合样本特征数较少的实际情况,max_features始终以步距1搜索,n_estimators参数先在1~200范围以步距10搜索,再在±10的范围以步距1搜索。
影响SVM分类精度的参数主要分为两部分,一部分是模型对分类错误样本的惩罚力度参数C,C越大表示惩罚越大,容错能力越小,训练更易过拟合。另一部分是核函数的参数,径向基核函数[55]的参数为gamma。C和gamma取值范围大且连续,采用PSO算法在0.01~100范围确定C和gamma的参数组合。
MLP与FCN同为神经网络模型,在固定网络基本框架的前提下,影响模型的关键参数包括损失函数(loss_function)、优化器(optimizer)和学习率(learning_rate)[56-57]。先用网格搜索法得到loss_function与optimizer的最佳参数组合,再使用PSO优化算法确定learning_rate,范围限制在10-6~10-4。另外,MLP模型结构较为简单,隐藏神经元个数(hidden_layer_sizes)也是一个重要的影响因素,使用网格搜索法在1~500范围内不断缩小步距,确定最终取值。
3 结果与分析
3.1 模型评估
根据表5确定的参数,训练RF、SVM、MLP和FCN等4种模型,通过数据集的测试集对模型进行评估,结果如表6所示。4种模型的总体准确度均超过75%,表现出区分北冰洋海雾、云和海表的能力。由POD指标看,神经网络模型MLP和FCN的海雾检测表现优于RF和SVM,说明神经网络模型的隐藏层能对数据进行更为复杂的非线性映射,且FCN含多层隐藏层结构,提取高层次抽象信息[58],从而具有更高的特征表达力。相比而言,SVM表现较差,说明D1对于SVM而言样本量太大,在大样本数据集和复杂数据情况下,无法体现SVM高效拟合的优势[33]。总体而言,FCN对北冰洋海雾POD(79.91%)最高,FAR(24.90%)最低,CSI(63.17%)也最高,优于其他3种模型。
4种模型分别对海雾、云和海表样本的判别情况如图2所示,模型预测为相同类别代表正确率,预测为其他类别代表误判率。对于海雾样本,各模型将其误判成海表的概率都较低,为1.56%~3.97%,而误判成云的概率较高,为18.53%~25.16%,其中,SVM最容易把海雾误判成云。这说明海雾与海表体现在R1、R26、B20-B31、B31-SST和SOZ中的特征差异能被4种模型学习到,而由于海雾与云,尤其与低层云的水汽含量和粒子大小相似,且存在相互转化现象[59-60],表现在5个特征中相似,模型难以完全区分二者。与其他模型相比,FCN把海雾误判为云或海表的概率都最低,对海雾检测的表现最优。对云样本而言,各模型最容易将其误判为海雾,误判成海表的概率也较低,但与海雾样本相比,云样本误判为海表的概率更高。与其他模型相比,FCN仍表现出最佳的云检测效果。对于海表样本,4种模型的检测能力都很高,正确率都在90%以上。
3.2 海雾个例检验
图3—6是随机选取的2个海雾个例。由2014年8月14日20:25(世界时,下同)的个例看,VFM垂直分类(图3a)显示129°~134°E为海雾,123°~124°E为云,134°~141°E为海表。结合可见光图像(图3b)可见,129°~134°E(红色实线附近)在图像上的纹理光滑且均匀,符合海雾的特征,而127°~130°E(绿色实线附近)呈现凹凸不平的特点,纹理相對粗糙,符合云的特征[61]。因此,CALIPSO的轨迹分类与可见光图像是吻合的。由4种模型对该场景的分类结果看,RF(图4a)、MLP(图4c)和FCN(图4d)在CALIPSO轨道上的雾区与VFM分类基本吻合,但SVM(图4b)把部分海雾像素误判为云,导致POD较低。RF、SVM和MLP把部分云也检测为海雾,对雾区检测范围偏大,导致FAR较高,且雾区不连续,这可能与模型是单点分类,未考虑相邻像素的空间关系有关。FCN检测的雾区连续性较强,因为FCN的卷积层可以提取相邻像素的空间信息和纹理特征[47]。但海雾边界不够细致,这是FCN在进行反卷积操作过程中丢失了边界信息导致的[62]。
選取2017年6月8日海雾个例,由VFM显示的垂直分类(图5a)看,157°~168°E为海雾,168°~175°E为海表,而由可见光图像(图5b)看,根据图像北部和东部(图5b中黑框)的纹理特征(如上文个例中提到的)判断为云,但冰雪与海雾的可见光反射率相当时,无法从可见光图像区分海雾(红色实线),这是极地地区一种常见现象。图6表示4种模型对该场景的分类结果,4种模型在CALIPSO轨道上的雾区与VFM分类基本吻合,海雾检测整体效果较好,说明模型可以区分海雾与冰雪覆盖的海表。且RF、SVM和MLP均检测到了北部和东部的云区(图6中黑框),而FCN将北部云区误判为海雾,说明FCN模型对海雾边界的检测有待进一步提高。
4 讨论
为了满足FCN训练要求,在D1基础上进行区域增长获得D2,这可能引入了错误标签。用D2再次训练MLP,发现MLP的OA为76.53%,POD为70.89%,FAR为31.07%,CSI为53.72%,与前文用D1训练的MLP相比,各项评价指标都有所变差。证明D2的确引入了干扰信息,而FCN仍表现出最佳的海雾检测能力,说明FCN鲁棒性[63]较强。提高数据集的准确性,其海雾检测能力也可能进一步提高。
由海雾个例检测效果看,FCN检测得到的海雾边界过于平滑。全连接条件随机场(fully connected conditional random field, 记为“Dense CRF”)能通过建立全部像素空间位置的联系,实现精准分割[27-28]。用Dense CRF模块处理FCN的预测结果后(图7),海雾边界处取得了更细致的效果,因此,后续研究可以加入Dense CRF模块优化用于FCN检测海雾出现的边界平滑问题。
5 结论
利用CALIOP L2 VFM数据、Aqua/MODIS数据,构建了2014—2018年夏季北冰洋地区的3类(海雾、云、海表)样本数据集D1,用于训练RF、SVM和MLP。在D1基础上,通过区域增长方法生成样本数据集D2,用于训练FCN。采用K折交叉验证法、网格搜索法和粒子群优化算法,选择了模型的最佳参数,使用测试集评估了RF、SVM、MLP和FCN这4种机器学习模型对北冰洋海雾的检测效果,得到以下结论:
(1)由海雾检测指标看,RF、SVM、MLP和FCN的海雾POD都在70%以上,表现出良好的海雾检测能力。MLP和FCN都含有隐藏层结构,具有更高的特征表达力,且FCN考虑了相邻像素间的空间相关性和纹理特征,检测的雾区连续性较强。综合来看,FCN海雾检测表现最佳,OA为81.96 %,POD为79.91%,FAR为24.90%,CSI为63.17%。
(2)模型将海雾误判成海表的概率为1.56%~3.97%,误判成云的概率较高,为18.53%~25.16%,尤其是SVM。这说明4种模型均能学习到海雾与海表的特征差异,而由于海雾与云具有相似的光谱特征,模型更难区分二者。与其他模型相比较而言,FCN把海雾误判为云或海表的概率都最低。
(3)由个例看,RF、SVM、MLP对海雾的检测范围偏大,且雾区不连续,而FCN检测的雾区连续且更准确,但其在雾区边界的检测过于平滑,缺失细节,这是因为FCN在进行反卷积操作过程中丢失了边界信息。Dense CRF能很好地联系全部像素的空间位置关系,细化检测边界,优化FCN检测海雾出现的边界平滑问题。
(4)用包含更多干扰信息的D2训练FCN,仍具有最佳表现,表明FCN具有较强的鲁棒性,也意味着FCN海雾检测能力可能还有提升空间。后期研究可以尝试结合海雾的发生机理和运动规律[64],制作更准确的数据集,以进一步验证和提高FCN检测海雾的能力。
致谢:感谢美国国家航空航天局(National Aeronautics and Space Administration,NASA)公开提供的Aqua/MODIS数据和CALIOP L2 VFM数据。
参考文献:
[1] PARKINSON C L, DIGIROLAMO N E. New visualizations highlight new information on the contrasting Arctic and Antarctic Sea-ice trends since the late 1970s[J]. Remote Sens Environ,2016,183:198-204.
[2]HANESIAK J M, WANG X L. Adverse-weather trends in the Canadian Arctic[J]. J Climate,2005,18(16):3140-3156.
[3]陈志昆,魏立新,李志强,等.2017年夏季北冰洋浮冰区海雾特征分析[J].海洋预报,2019,36(2):77-87.
[4]XIE S M, BAO C L, JIANG D Z. Role of sea ice in air-sea exchange and its relation to sea fog[J]. Chin J Polar Sci,2001,12(2):119-132.
[5]KORACˇIN D, DORMAN C E, LEWIS J M, et al. Marine fog: a review[J]. Atmos Res,2014,143:142-175.
[6]HUNT G E. Radiative properties of terrestrial clouds at visible and infra-red thermal window wavelengths[J]. Quart J Royal Meteoro Soc,1973,99(420):346-369.
[7]EYRE J R, BROWNSCOMBE J L, ALLAM R J. Detection of fog at night using Advanced Very High Resolution Radiometer (AVHRR) imagery[J]. Meteor Mag,1984,113(1346):266-271.
[8]GAO S H, WU W, ZHU L L, et al. Detection of nighttime sea fog/stratus over the Huang-Hai Sea using MTSAT-1R IR data[J]. Acta Oceanol Sinica,2009,28(2):23-35.
[9]赵诗童,时晓曚,吴晓京,等.三种经典夜间陆地雾遥感反演方法的适用性对比分析[J].海洋气象学报,2021,41(1):45-57.
[10]邓军,白洁,刘健文,等.基于MODIS多通道资料的白天雾监测[J].气象科技,2006,34(2):188-193.
[11]郝增周,潘德炉,龚芳,等.海雾的遥感光学辐射特性[J].光学学报,2008,28(12):2420-2426.
[12]文雄飛,谭德宝,陈蓓青,等.归一化雾指数法白天陆地辐射雾检测研究[J].长江科学院院报,2011,28(10):210-216.
[13]ANTHIS A I, CRACKNELL A P. Use of satellite images for fog detection (AVHRR) and forecast of fog dissipation (METEOSAT) over lowland Thessalia, Hellas[J]. Int J Remote Sens,1999,20(6):1107-1124.
[14]SHIN D, PARK H, KIM J H. Analysis of the fog detection algorithm of DCD method with SST and CALIPSO data[J]. Atmosphere,2013,23(4):471-483.
[15]张春桂,蔡义勇,张加春.MODIS遥感数据在我国台湾海峡海雾监测中的应用[J].应用气象学报,2009,20(1):8-16.
[16]张春桂,林炳青.基于FY-2E卫星数据的福建沿海海雾遥感监测[J].国土资源遥感,2018,30(1):7-13.
[17]邓玉娇,王捷纯,曹静.基于MODIS遥感资料监测南海白天雾[J].热带气象学报,2013,29(6):1046-1050.
[18]刘希,胡秀清.基于MTSAT卫星的我国东部沿海雾区的自动识别[J].台湾海峡,2008,27(1):112-117.
[19]ZHANG S P, YI L. A comprehensive dynamic threshold algorithm for daytime sea fog retrieval over the Chinese adjacent seas[J]. Pure Appl Geophy,2013,170(11):1931-1944.
[20]何月,张小伟,蔡菊珍,等.基于MTSAT卫星遥感监测的浙江省及周边海区大雾分布特征[J].气象学报,2015,73(1):200-210.
[21]YI L, LI K F, CHEN X Y, et al. Arctic fog detection using infrared spectral measurements[J]. J Atmos Ocean Technol,2019,36(8):1643-1656.
[22]XIAO Y F, ZHANG J, QIN P. An algorithm for daytime sea fog detection over the Greenland Sea based on MODIS and CALIOP data[J]. J Coast Res,2019,90(S1):95-103.
[23]肖艳芳,张杰,崔廷伟,等.海雾卫星遥感监测研究进展[J].海洋科学,2017,41(12):146-154.
[24]YIN M J, WANG P, NI C, et al. Cloud and snow detection of remote sensing images based on improved Unet3[J]. Sci Rep,2022,12(1):14415.
[25]YI L, LI M Y, LIU S X, et al. Detection of dawn sea fog/low stratus using geostationary satellite imagery[J]. Remote Sens Environ,2023,294:113622.
[26]许赟,许艾文.基于随机森林的遥感影像云雪雾分类检测[J].国土资源遥感,2021,33(1):96-101.
[27]刘树霄,衣立,张苏平,等.基于全卷积神经网络方法的日间黄海海雾卫星反演研究[J].海洋湖沼通报,2019(6):13-22.
[28]黎梦雅,时晓曚,吴晓京,等.基于卷积神经网络的西北太平洋夜间海雾/低云卫星检测方法研究[J].海洋气象学报,2023,43(1):1-11.
[29]LEE H B, HEO J H, SOHN E H. Korean fog probability retrieval using remote sensing combined with machine-learning[J]. GISci Remote Sens,2021,58(8):1434-1457.
[30]RAN Y Z, MA H Y, LIU Z W, et al. Satellite fog detection at dawn and dusk based on the deep learning algorithm under terrain-restriction[J]. Remote Sens,2022,14(17):4328.
[31]KIM D, PARK M S, PARK Y J, et al. Geostationary Ocean Color Imager (GOCI) marine fog detection in combination with Himawari-8 based on the decision tree[J]. Remote Sens,2020,12(1):149.
[32]劉年庆,蒋建莹,吴晓京.基于支持向量机的遥感大雾判识[J].气象,2007,33(10):73-79.
[33]张顺谦,杨秀蓉.基于神经网络和分形纹理的夜间浓雾遥感监测技术[J].应用气象学报,2005,16(6):804-810.
[34]张睿,马建文.支持向量机在遥感数据分类中的应用新进展[J].地球科学进展,2009,24(5):555-562.
[35]GAO B C, HAN W, TSAY S C, et al. Cloud detection over the Arctic region using airborne imaging spectrometer data during the daytime[J]. J Appl Meteor,1998,37(11):1421-1429.
[36]WINKER D M, VAUGHAN M A, OMAR A, et al. Overview of the CALIPSO mission and CALIOP data processing algorithms[J]. J Atmos Ocean Technol, 2009,26(11):2310-2323.
[37]YI L, LI K F, CHEN X Y, et al. Summer marine fog distribution in the Chukchi-Beaufort Seas[J]. Earth Space Sci,2023,10(2):e2021EA002049.
[38]CERMAK J. Fog and low cloud frequency and properties from active-sensor satellite data[J]. Remote Sens,2018,10(8):1209.
[39]HENSMAN P, MASKO D. The impact of imbalanced training data for convolutional neural networks[D].Stockholm: KTH Royal Institute of Technology,2015.
[40]BREIMAN L. Random forests[J]. Mach Learn,2001,45:5-32.
[41]CORTES C, VAPNIK V. Support-vector networks[J]. Mach Learn,1995,20(3):273-297.
[42]KEERTHI S S, SHEVADE S K, BHATTACHARYYA C, et al. A fast iterative nearest point algorithm for support vector machine classifier design[J]. IEEE Trans Neural Netw,2000,11(1):124-136.
[43]MAVROFORAKIS M E, THEODORIDIS S. A geometric approach to support vector machine (SVM)classification[J]. IEEE Trans Neural Netw,2006,17(3):671-682.
[44]RUMELHART D E, HINTON G E, WILLIAMS R J. Learning representations by back-propagating errors[J]. Nature,1986,323:533-536.
[45]LIU K Z, SHI W W, HUANG C J, et al. Cost effective Tanh activation function circuits based on fast piecewise linear logic[J]. Microelectron J,2023,138:105821.
[46]HAHNLOSER R H, SARPESHKAR R, MAHOWALD M A, et al. Digital selection and analogue amplification coexist in a cortex-inspired silicon circuit[J]. Nature,2000,405:947-951.
[47]GEIRHOS R, RUBISCH P, MICHAELIS C, et al. ImageNet-trained CNNs are biased towards texture; increasing shape bias improves accuracy and robustness[J]. arXiv,2018:abs/1811.12231.
[48]SHELHAMER E, LONG J, DARRELL T. Fully convolutional networks for semantic segmentation[J]. IEEE Trans Pattern Anal Mach Intell,2017,39(4):640-651.
[49]周天寧,明冬萍,赵睿.参数优化随机森林算法的土地覆盖分类[J].测绘科学,2017,42(2):88-94.
[50]SCHAFFER C. Selecting a classification method by cross-validation[J]. Mach Learn,1993,13(1):135-143.
[51]SUDHEER C, MAHESWARAN R, PANIGRAHI B K, et al. A hybrid SVM-PSO model for forecasting monthly streamflow[J]. Neural Comput Appl,2014,24(6):1381-1389.
[52]黄少荣.粒子群优化算法综述[J].计算机工程与设计,2009,30(8):1977-1980.
[53]CERMAK J, BENDIX J. A novel approach to fog/low stratus detection using Meteosat 8 data[J]. Atmos Res, 2008,87(3/4):279-292.
[54]YI L, ZHANG S P, THIES B, et al.Spatio-temporal detection of fog and low stratus top heights over the Yellow Sea with geostationary satellite data as a precondition for ground fog detection: a feasibility study[J]. Atmos Res,2015,151:212-223.
[55]奉国和.SVM分类核函数及参数选择比较[J].计算机工程与应用,2011,47(3):123-124,128.
[56]IIDUKA H. Appropriate learning rates of adaptive learning rate optimization algorithms for training deep neural networks[J]. IEEE Trans Cybern,2022,52(12):13250-13261.
[57]DUBEY S R, CHAKRABORTY S, ROY S K, et al.DiffGrad: an optimization method for convolutional neural networks[J]. IEEE Trans Neural Netw Learn Syst,2020,31(11):4500-4511.
[58]SHI Z F, LI H, CAO Q J, et al. An image mosaic method based on convolutional neural network semantic features extraction[J]. J Signal Process Syst,2020,92(4):435-444.
[59]张苏平,刘飞,孔扬.一次春季黄海海雾和东海层云关系的研究[J].海洋与湖沼,2014,45(2):341-352.
[60]SAMELSON R M, DE SZOEKE S P, SKYLLINGSTAD E D, et al. Fog and low-level stratus in coupled ocean-atmosphere simulations of the northern California Current System upwelling season[J]. Mon Wea Rev,2021,149(5):1593-1617.
[61]GAO S H, LIN H, SHEN B, et al. A heavy sea fog event over the Yellow Sea in March 2005:analysis and numerical modeling[J]. Adv Atmos Sci,2007,24(1):65-81.
[62]HE C, LI S L, XIONG D H, et al. Remote sensing image semantic segmentation based on edge information guidance[J]. Remote Sens,2020,12(9):1501.
[63]周东宁.卷积神经网络的鲁棒性分析[D].大连:大连理工大学,2022.
[64]张苏平,张欣,时晓曚.亲潮延伸体海区一次海雾过程的观测研究[J].海洋气象学报,2022,42(1):1-11.
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25
科学家(2019年3期)2019-08-18
小哥白尼(趣味科学)(2018年7期)2018-09-19
电子技术与软件工程(2016年24期)2017-02-23
时代金融(2016年27期)2016-11-25
科教导刊(2016年26期)2016-11-15
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
百科探秘·航空航天(2015年6期)2015-11-07
新东方英语(2014年1期)2014-01-07
