
基于空间句法与机器学习的中国古典园林空间指征分析框架建构
2024-03-25 09:25陈星汉于瀚婷熊若璟叶宇
风景园林 2024年3期
陈星汉 于瀚婷 熊若璟 叶宇*
1 研究背景
1.1 基于经验感知的中国古典园林空间经典理论研究
中国古典园林空间研究具有较长的历史,早期研究往往基于人的经验感知,对古典园林的空间体验和造园特色进行分析。代表性研究有童寯在《江南园林志》中从“疏密得宜、曲折尽致、眼前有景”3种不同角度总结古典园林的空间意趣[1];陈从周在《说园》中围绕中国古典园林的独特风格展开研究,从动静体验、曲直营造等方面对空间特征进行讨论[2]。而后,中国古典园林的研究逐步走向更加系统和全面的空间特征分析,如刘敦桢在《苏州古典园林》中讨论了园林空间的营造手法,从“对比与衬托”“对景与借景”“深度与层次”等多方面入手,分析了园林的空间层次、变换布局和视线动线组织[3];彭一刚在《中国古典园林分析》中系统分析了古典园林的空间特点,全面探讨了渗透层次、曲折对比、视觉感知、路径引导、藏露虚实等主题[4]。
这些研究取得了丰硕的理论成果,构建了和人本感知高度契合且古典园林空间专属的研究视角,也使后续研究者们意识到要想深入解读园林空间的结构和布局,建构系统全面的分析维度和指征是一条有效途径[5-6]。但由于技术受限,这些早期的理论探索往往只能局限于定性分析,尚未开展更加深入且量化的实证研究。
1.2 空间句法在园林研究中的兴起与局限
空间句法(space syntax)作为一种分析空间结构和视线关系的有效方法[7-9],自2010年以来被应用于中国古典园林的空间研究[10]。研究者们尝试使用这一新工具对过去难以定量测度的空间特征进行解释,探索视觉感知之下的隐藏结构[11]。早期的相关研究主要贡献在于初步确定了空间句法工具的可行性,并提出了区分可视层(eye-level)和可行层(kneelevel)的研究模式[12]。此后,使用空间句法分析园林空间特征的研究开始涌现。绝大部分研究都遵循了类似的框架,即借助DepthmapX软件,采用视域分析法(visibility graph analysis,VGA)对园林空间的整合度(integration)、连接度(connectivity)、深度值(step depth)等VGA内置参量展开计算和分析。拙政园[13-15]、网师园[16]、留园[17]、何园[18]等名园被选为研究对象,并得到了空间拓扑层面的解读。也有一些研究试图在方法上予以改进,尝试以空间句法为基础分析古典园林空间的开合[19]或“看与被看”[20]等特点,但并未进行系统化的指征和方法建构。
总体而言,当前相关研究的主要不足是分析框架缺乏系统性和空间指征缺乏可感知性。首先,面向古典园林的空间句法研究与经典理论存在脱节,研究者难以准确选择园林空间的研究维度,这导致对园林空间的空间句法解读缺乏系统性。其次,如直接套用空间句法内置参量(如整合度、连接度等)进行分析,对古典园林空间的解释会存在缺陷,难以和人真实的空间感知及其对应的造园理法建立联系。此外,当前研究大多局限于空间句法的简单应用,解读深度不足。尽管VGA的相关研究已经较为充分,但VGA热力图无法对园林空间的感知体验进行表征,也无法对非显著区域形成有效解读。这也是园林的量化分析尚未有效融合进设计实践的主要原因。因此,不论是新指征的测度、解析度的提升还是赋能设计的需要,空间句法的应用都有待外部技术的优化加持。
1.3 发展方向:经典理论和多元量化方法相结合
由前所述,侧重经验感知的经典理论在量化方面存在困难,而以空间句法为代表的量化研究则在系统理论的建构上存在不足。为此,本研究希望将经典理论的研究视角与量化分析的技术方法融合,对经典理论进行归纳,提炼兼具可感知性和可测度性的空间指征,并在此基础上,借助空间句法、机器学习等多种技术工具,构建高推广度、深解析度的指征测度方法,立足园林研究领域,从人本感知出发,实现对过去“不可测度”的古典园林空间指征的系统测度,并从方法上形成对实践支持的可能。
2 理论框架
2.1 基于经典理论的空间指征建构
为实现园林空间的测度,有必要从经典理论和既有研究出发,提出一套具有园林空间研究特点且符合人本感知的空间指征。在建构过程中,本研究基于古典园林的经典理论专著[1-4],归纳了最具代表性的古典园林空间指征:渗透性、曲折度、可视性、可达性、差异度(表1)。这些指征既能反映园林空间的感知特点,又具有测度的可行性,可作为后续研究的基础。
这5项空间指征的概念内涵和经典理论相对应,反映了古典园林不同维度的空间特征:1)渗透性指空间整体的疏密和层次关系,与空间之间的分隔、穿插、打通和连接情况有关,影响了人对空间流动性的感知;2)曲折度指园林中空间之间的方向变化,直接关系到游园过程中人能体验到的“迂回感”,反映了动线的空间节奏以及“回环曲折”的游园体验;3)可视性代表了园林中视野的开阔性和视线“对景”情况,解释了园林空间给人营造视觉体验的空间机制;4)可达性表征了园林空间中动线的整体组织和到达不同空间的难易程度,关系到人在园林中行进的动态感知、空间的设计引导与体验顺序;5)差异度则用于表征古典园林中空间收放、藏露手法的转换,和园林中“可达”和“可视”的空间错位相关,体现了“忽隐忽现”“含蓄不尽”的空间感知。
引入这些指征,将使得量化分析的开展真正契合古典园林的空间特点,有助于经典理论中的感知性视角在量化研究中的延续。
2.2 面向量化分析的空间指征映射框架建构
基于经典理论所提炼的指征需要进一步向量化分析转化。在方法上以VGA为基础,同时面向园林空间的感知体验进行组合建构。在VGA中连接度、深度值和整合度的应用最为广泛。连接度指某元素向外可以看见的其他元素的个数,代表了空间的渗透性和连接性。深度值包括基于距离、角度等的多种类型,微观层面上指2个元素可以互视的最小步数(或角度变化等)。假设dij是连接任意两点i和j之间的最短距离,n为节点总数,平均深度值(mean depth)的计算式
整合度指剔除了拓扑结构不对称影响的基础上的全局视线深度情况,计算式
连接度、深度值、整合度在一定程度上反映了空间特点和对应的感知情况,但这些测度参量并非面向古典园林这一特殊领域所提出的。为此,本研究延续了可行层、可视层分离的分析方式。以游园者视线高度(取1.6 m)水平面上所有可见的视域范围作为可视层,游园者正常游园活动可以遍及的区域范围[12]作为可行层。为实现VGA指标向空间指征的有效转化,本研究采取了多模型、多指标叠合的方式,综合了空间指征概念、空间感知经验与VGA指标内涵,提出了5项空间指征和对应的人本感知角度、造园理法,以及基于VGA的测度方式的综合映射框架(图1),使得量化方法能更好地应用于古典园林空间领域。
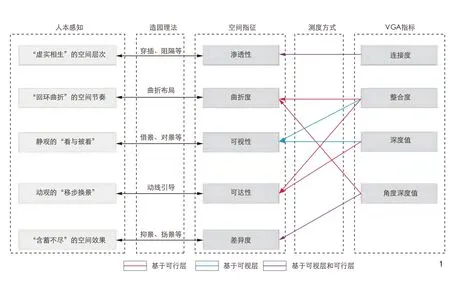
图1 以空间指征为核心的综合映射框架A holistic mapping framework centered on spatial indicators
5项空间指征的测度方法从人本感知角度出发进行建构,并对应了塑造相关体验的传统造园理法。渗透性对应了园林中空间穿插、阻隔的手法,过去研究中多使用连接度进行表征[21]。因此,本研究选择将可视层、可行层连接度叠加作为渗透性数值,用于反映人对空间层次、虚实的感受。曲折度反映了游园动线布局的曲折情况,不仅关系到空间序列的先后顺序,也和角度转折相关,因此曲折度的测度主要采用基于角度权重的深度值。此外,为对空间结构进行系统刻画,还结合了整合度。综合以上指标,曲折度的测度能反映人们对空间节奏错落性的感知。可视性对应了对景、借景、框景等一系列视线营造手法。可达性则代表了园林设计中动线的组织和引导。本研究参考既有研究[18],将具备空间系统性表征能力的整合度与考虑出入口位置的深度值进行叠加,从而实现对可视性、可达性的测度。据此,可视性能实现“静观”的体验表征,可达性则能刻画“动观”的游园体验。差异度和动视错位的独特现象息息相关,对应了传统理法中的抑景和扬景。本研究选择了整合度这一最具通用性的VGA指标,以可视层、可行层整合度的差值作为测度值。
3 研究设计
3.1 研究框架
为推动新兴量化研究与传统理论的融合,本研究从经典理论中提炼了5项空间指征,并构建了指征和实际测度指标之间的映射关系(图2)。基于此,本研究结合了空间句法、地理信息技术等多种技术手段,探索空间指征的测度方法,并结合机器学习实现特征空间聚类的识别,拓展多层级解析空间的可能性,构建一套可推广的空间分析范式。本研究选择了留园、拙政园中园作为示例,对空间指征进行测度分析。通过开展空间感知试验,初步验证指征测度与实际感知的契合度。

图2 研究框架Research framework
3.2 研究对象:留园、拙政园中园
留园和拙政园均被誉为“江南四大名园”之一,是江南古典园林的代表,二者在空间形态、布局和组织上具有典型性,能较好地反映中国古典园林的空间特征和营造特点。而从可操作性上考虑,两者的测绘资料较为齐全。拙政园中园保留了明代的格局特点,和留园整体尺度相近,在具体的空间组织上又存在一定差异,能较好地展示空间指征在可测度层面的优势。本研究中,留园和拙政园中园的建模参考了《苏州古典园林》[2]中刊载的留园及拙政园中园测绘平面图,分析模型在AutoCAD中进行绘制并采取了可行层和可视层的建模方式。
3.3 研究方法:空间指征测度的技术路线
空间指征的分析测度分为3个步骤,分别基于空间句法、地理信息分析以及机器学习算法实现。1)使用DepthmapX这一空间句法工具对园林空间的可视层、可行层模型开展VGA研究,以75 cm方格作为贴合人体感知的单元构建分析网格,对连接度、整合度、深度值(包括基于角度权重的深度值)等VGA指标进行计算,得到包含指标数据和空间信息的csv格式文件。2)借助ArcGIS平台对csv格式文件中的不同VGA指标数值进行归一化处理,并参照空间指征的映射框架进行多模型多指标叠加分析,从而实现空间指征的初步测度。3)使用具有噪声的基于密度的聚类(density-based spatial clustering of applications with noise, DBSCAN)算法,对ArcGIS中导出的数据表进行聚类分析,根据分析需求实现各层级空间组团的定位识别。
上述第三步中使用的DBSCAN算法是一种常用的无监督学习算法[22-23],能基于空间点的密度分布对数据进行聚类分析,把古典园林平面中满足密度要求的连续特征区域划分为组团。而空间中零散、低密度的点位则被认为与设计意图和空间体验无关,被作为噪点筛除。因此,DBSCAN算法能实现对园林不同指征下空间的特征提炼,反映指征聚类的数量、范围、形状并进行可视化。此外,古典园林空间极为复杂,相邻空间的体验感受都可能存在较大差异,这就需要对各指征聚类进行层级性研究,切片式解析空间。使用DBSCAN算法进行特征提炼能针对不同层级开展,并不局限于显著区间。而在方案分析中,恰恰是非显著空间对应了待优化的部分。本研究筛选出各空间指征中前20%的数据,代表该指征下表现最突出的点位,通过DBSCAN算法的计算,在筛除噪点数据后,为剩余点标记聚类。经过筛除点数量低于100的微型聚类,得到了5项指征的聚类特征。本研究还以留园为例,将非显著区间分为4档(>20%~40%、>40%~60%、>60%~80%、>80%~100%),实现了相应空间特征的提取。
3.4 研究验证:空间感知试验设计
为验证空间指征及其测度方式的科学性,本研究开展了一个小范围的空间感知试验。本研究筛选了7位被试者,由研究人员引导,于工作日前往留园和拙政园中园,在研究范围内实地进行空间感知,并在此基础上完成图像问卷。问卷中共设置了5项问题,分别对应渗透性、曲折度、可视性、可达性和差异度的概念,从感知层面予以描述和解释,并要求被试者在地图中标记15~20个符合这些感知特征的点位。此后,研究人员借助ArcGIS软件将收集到的空间点位标注在地图中,并进行了基于核密度分析的热力图绘制。得到的热力分布图在一定程度上反映了被试者主观层面的空间感知,通过与空间指征的叠加分析和聚类分析进行比对,初步验证空间指征测度结果和真实空间感知的契合度。
4 空间指征测度示例:留园、拙政园中园
4.1 空间指征测度与量化分析
4.1.1 渗透性
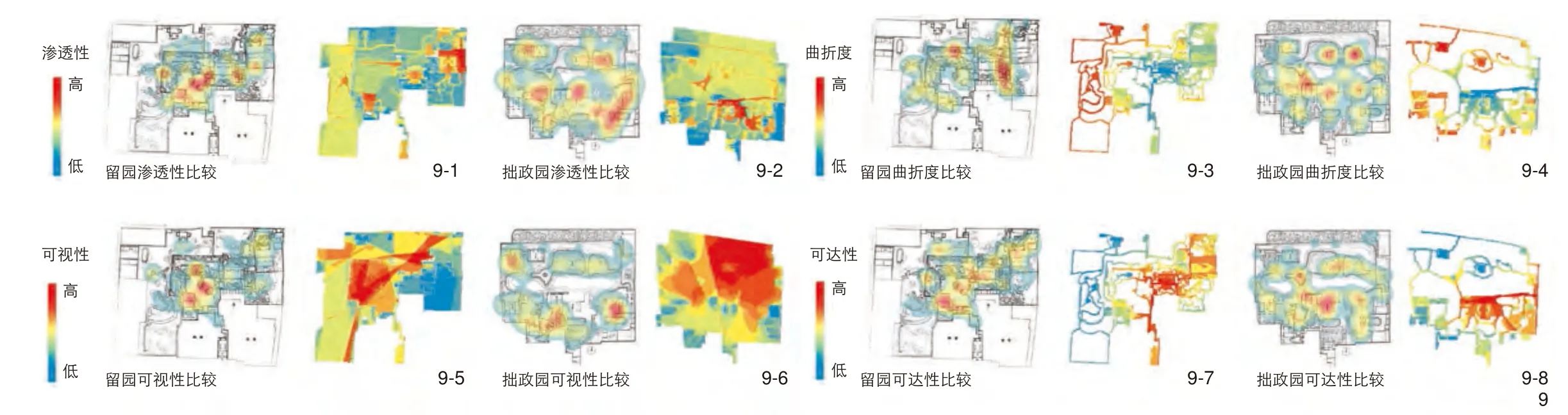
本研究分别测得了留园、拙政园中园渗透性分布情况以及典型聚类特征(图3)。
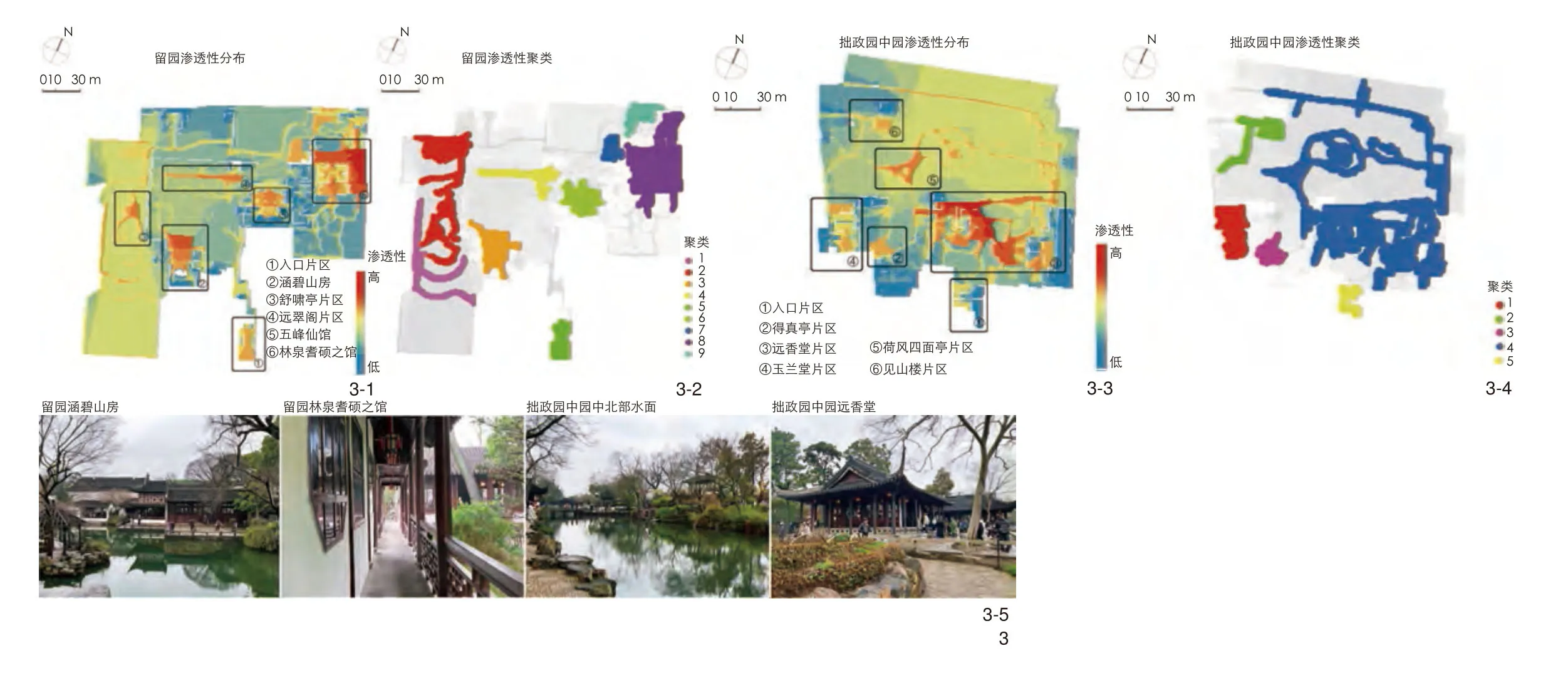
图3 渗透性分析Permeability analysis
留园的高渗透性区域呈散点分布,在聚类分析中得以被清晰识别。这些聚类包括涵碧山房、舒啸亭、远翠阁、五峰仙馆和林泉耆硕之馆等区域,其空间开放度和连通度最高。与之相对,在这些聚类之间的路径和区域对空间的阻隔和遮挡则更多。
拙政园中园的高渗透性区域分布特征与留园类似,均围绕主要建筑的开敞空间分布,分为两部分:西侧的聚类数量多而面积小,包括得真亭、玉兰堂、见山楼等处;东侧的聚类面积大而完整,以远香堂、玲珑馆等为核心。这代表了2种不同的空间体验,前者因聚类零散而富于变化,后者则更为疏朗开阔,空间流动性强。
4.1.2 曲折度
曲折度的测度反映了空间“回环错落”的程度(图4)。从整体分布来看,留园和拙政园中园内曲折度高的区域均匀分布在四周。留园曲折度最高的区域为西园,包括活泼泼地等处,次高区为鹤所、佳晴喜雨快雪之亭以及林泉耆硕之馆的南院。拙政园中园则以玉兰堂、小沧浪、雪香云蔚亭等形成显著聚类。可以发现,2个园林中的主要空间场景(留园水面周边、五峰仙馆以及拙政园的远香堂)的曲折度普遍较低,但相邻附属空间的曲折度则相对显著。
4.1.3 可视性
在可视性的测度中发现,可视性高的空间往往以视线通廊的形式出现,其起止区域和“看与被看”的视线感知相关(图5)。留园的聚类分析显示,园林空间从西南向东北构成了一条较为连续的高可视性通道,其中活泼泼地、涵碧山房、汲古得绠处、还我读书处、冠云峰等空间形成了聚焦点。而在拙政园中,视线可达性则由南向北逐渐递增,北侧的“景”作为南侧所“对”的对象出现。聚类分析则清晰显示了雪香云蔚亭、北山亭周边是整个园子的“对景”核心。

图5 可视性分析Visibility analysis
4.1.4 可达性
可达性的测度显示了留园和拙政园中园中空间的组织特点和到达的难易度(图6)。留园可达性最高的空间位于中部和东部,以五峰仙馆为中心向南北延伸。聚类分析显示高可达性的空间连续,且构成了园林的主干。而拙政园中园可达性最高的区域集中在中部,以远香堂为核心形成单一聚类。由此,留园和拙政园中园的空间组织结构得到识别,前者呈线性向两侧发散,后者呈点状向四周发散。可见,尽管园林的空间营造手法多变而复杂,但在结构组织上却简洁而清晰。
4.1.5 差异度
本研究对留园和拙政园中园的差异度进行了测度和分析(图7)。在留园中,高差异度的空间主要分布在建筑与小尺度的院落区域,从入口空间一直向东北的林泉耆硕之馆延伸,形成2个主要聚类。在这些空间中,依托于廊、窗和各类开口,形成了极为丰富的景物变化和藏露转换,具有很强的空间趣味性。而对于拙政园中园,差异度聚类基本呈现散点分布,并主要位于南部,例如远香堂、玉兰堂、玲珑馆等处,见山楼北侧也有少量分布。可以发现,不论在留园还是拙政园中园,高差异度的空间往往都存在着建筑墙体、廊道等紧凑而灵活的空间围合体,其中的镂空和开口是差异度形成的重要原因。
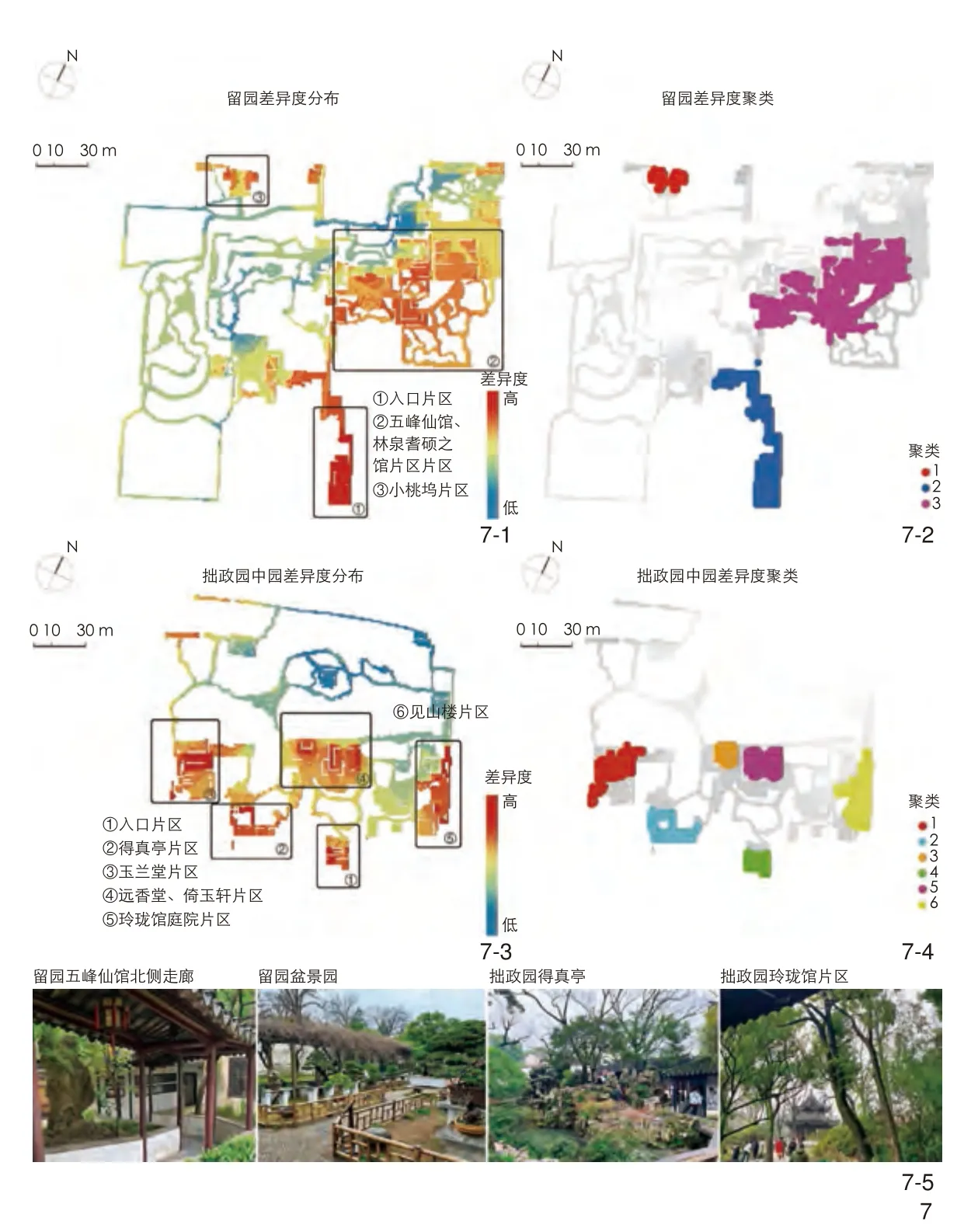
图7 差异度分析Differentiation analysis
4.1.6 基于DBSCAN算法的各显著度层级空间特征识别
除了上述对显著空间的分析,本研究还以留园为示范对非显著的各层级空间聚类进行特征提取(图8),实现了对园林空间的切片式解析。指征>20%~40%区段代表了仅次于显著空间的组团;指征>40%~60%区段所对应的指征既不显著表达,也不显著抑制,缺乏倾向性;指征>60%~100%区段特别是指征>80%~100%区段的聚类对应了该指征抑制不表达的情况。全层级的特征提取既可以用于表示各指征在不同显著度区段的空间分布情况,用于判断指征体验的空间连续性,也可以横向比较同一空间在不同指征下所处的显著度档次,以空间组团为基本单位研判各维度的感知情况。在应用中应当针对不同的研究需求开展不同层级的聚类分析。
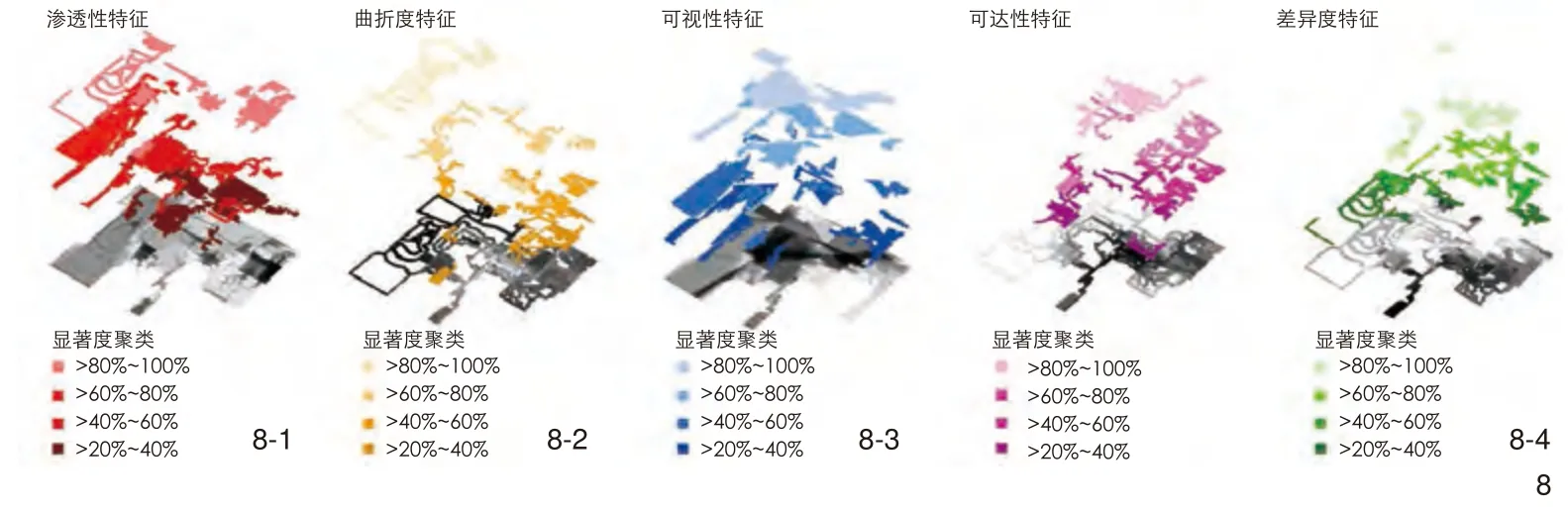
图8 基于DBSCAN算法的各显著度层级空间特征提取:以留园为例Extraction of spatial features at various saliency levels based on DBSCAN algorithm: a case study of Liu Garden
4.2 空间特征值测度
在ArcGIS叠加分析的基础上,通过对数据进行归一化处理,得到了留园和拙政园中园空间指征的平均值(表2),并绘制了特征画像(图9)。结果表明,留园、拙政园中园的渗透性、曲折度和差异度基本相同。二者的差异主要体现在可视性和可达性层面。留园的可视性(0.56)远低于拙政园(0.73),但可达性(0.59)却高于拙政园(0.55),这说明拙政园中园视野的通达性比留园更强,而后者在路径营造方面更为紧凑。这一结论和人们对拙政园中园和留园空间的实际整体感知情况一致。
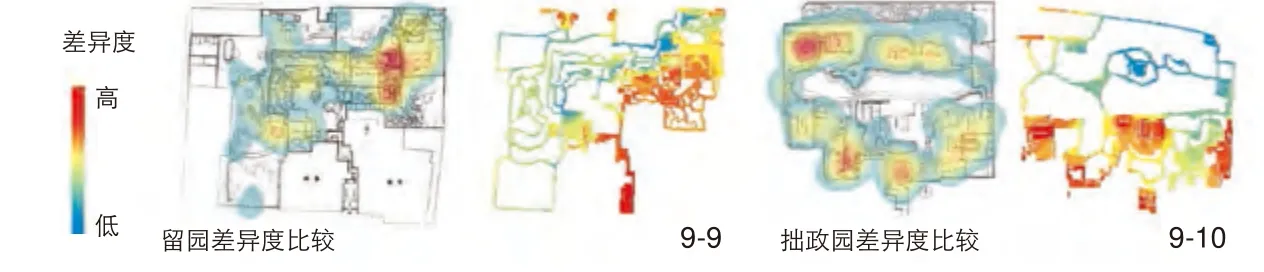
图9 结果对比:空间感知热力图与指征分析图Results comparison: spatial perception heatmap & indicator analysis chart

表2 空间指征测度结果Tab.2 Measurement results of spatial indicators
4.3 空间感知试验与研究比对
对感知试验中被试者标注点位进行核密度分析,绘制留园和拙政园中园的空间感知热力图,其中颜色较暖的区域代表了被试者们认为特征性较强的空间。基于此,本研究对采用空间句法、机器学习等测度的结论和实际空间感知情况进行了比对,分析二者的契合度(图9)。
感知试验表明,留园中高渗透性空间呈散点分布,如涵碧山房、五峰仙馆等处,与量化分析基本对应。对被试者而言,拙政园中园的高渗透性区域西部分布零散,东侧则较为完整,从远香堂、玲珑馆至北山亭均有分布,和分析结论完全吻合。
在曲折度的比对中,留园的整体分布情况与分析一致,但在感知层面,尽管西部的曲折度较高,却不如东侧石林小屋一带显著。拙政园感知热力图中的高曲折度区域和量化测度的匹配度更好,见山楼、香洲、雪香云蔚亭等空间的显著性被成功预测。
对于可视性,留园结果的契合度要优于拙政园中园。留园的试验表明,从中部水面至东北冠云峰一带的可视性均良好,和测度结果一致。而由于对开阔水面等不可达空间的认知偏差,拙政园测度与实际感知情况的一致性不高。
可达性方面的测度与分析结果匹配度较好,留园和拙政园中园可达性最高的空间,如留园中部和拙政园远香堂一带,都和测度结果一致。此外,不同区间的可达性分布也能被良好预测。
在差异度上,拙政园的一致性更高,见山楼西侧、玉兰堂、远香堂等点位的高差异度都和实际情况吻合。而留园中虽然入口序列的高差异度未被记录,但其余空间的差异度分布情况都得到了较好反映。
上述试验分析表明,此前的量化测度结果和被试者的主观感知具有较高的一致性,初步证明了空间指征及分析框架的科学性和合理性。此外,在比对中也发现了一些偏差。例如由于人们的游园会受到空间意象特征的影响[24-25],尽管留园西部、拙政园中园北侧水面分别具有高渗透性和可视性,可能因为在设计营造上缺乏特色,被试者并不会留意和标注这些区域。
5 讨论与结论
5.1 面向古典园林的多维度空间感知指征建构
本研究对中国古典园林经典理论进行了综合梳理和归纳,提出了一套系统的空间指征,包括渗透性、曲折度、可视性、可达性和差异度。比起过去分析中使用的指标,这5项空间指征能更加全面地刻画古典园林的空间特色,能够对应古典园林空间研究的主要维度,从古典园林独有的研究视角切入,反映其空间意境和营造特点。此外,这些指征延续了经典理论对经验感知的关注,能更好地反映人在游园过程中的主观体验,且具有可测度性,能在后续研究中被精细化地定量评估。
5.2 可操作、易推广的园林空间测度框架
在空间指征建构的基础上,本研究通过多种量化技术方法相结合,构建了一套可操作、易推广的测度框架。应用此框架能开展对复杂多变的中国古典园林空间的有效测度,实现对空间层次、空间组织、视觉感知、动线体验、空间趣味等多方面的深入分析,以及“虚实相生”“回环曲折”“步移景异”等空间体验和传统园林营造理法的量化解读。同时,利用本方法可以快速实现对中国现存典型古典园林案例的大规模、精细化测度,从量化层面加深人们对古典园林空间艺术的系统认识,有助于中国古典园林的空间研究朝向科学化和精细化方向发展。
此外,本研究还能赋能设计实践。由于本研究所关注的是内在的空间特征而非外在的风格表达,因此对于当代的景观设计项目,通过研究经典园林不同指征的聚类特征,能辅助设计人员有效把握传统园林的空间营造思路。同时,应用本方法能够快速实现对既有设计方案空间布局、组织结构、感知体验等方面的量化评估。尤其是对于设计过程中重点关注的待优化空间,本研究采用的分层级聚类方法能对此进行识别,有利于设计过程中方案的迭代优化,增强方案在空间感知层面的体验感和趣味性。
5.3 多元量化工具的综合应用
在技术创新方面,本研究综合运用了空间句法、地理信息技术、机器学习等多种量化方法,作为古典园林感知性空间指征的测度尝试,超越了对空间句法分析模式的简单套用。本研究通过空间句法和ArcGIS的叠加分析实现了人本感知的量化表征。同时结合DBSCAN算法的聚类分析实现了对各层级空间特征的识别,为深入解读园林空间指征的层级化设计以及实践优化提供了可能。总而言之,在工具层面,本研究丰富并拓展了园林空间量化研究的技术库和方法库,并对其有效性加以验证。
5.4 研究局限与未来展望
本研究在经典理论的基础上总结了一套较为全面的空间指征,并探索了基于空间句法、机器学习技术的指征测度方法。但与此同时,本研究仍存在一定局限。一方面,空间指征的建构主要基于对经典专著的归纳梳理,纳入的理论材料有限,这使得建构指征的全面性可能存在欠缺。而对于空间指征测度所采用的指标映射框架,也存在优化空间。不论是VGA指标的选择,还是叠加的组合与权重,都需要进行更加深入的研究和比选。另一方面,由于参与研究的志愿者数量有限,在验证环节的结果可能存在一定误差,空间标注也容易受到试验因素外的其他条件的影响。在未来,可以考虑进行更大规模的验证试验,从而排除不确定因素的干扰,并通过试验结果不断修正和优化空间指征的映射框架,提升空间指征测度结果和人本感知的匹配度。
猜你喜欢
初中生世界(2023年37期)2023-11-05
作文小学高年级(2023年5期)2023-05-29
现代苏州(2021年20期)2021-11-02
中华肩肘外科电子杂志(2019年4期)2019-08-24
养生大世界(2018年12期)2018-12-19
现代世界警察(2017年12期)2017-12-19
大观(2017年8期)2017-08-29
美与时代·城市版(2017年5期)2017-07-15
中国卫生标准管理(2015年16期)2016-01-20
中国卫生标准管理(2015年4期)2016-01-14
