基于改进WOA 参数优化的反应釜PID 控制器
2024-04-02 03:42徐文光杨开明幸响云谭建所王洪亮
现代电子技术 2024年7期
徐文光,麦 鴚,杨开明,幸响云,谭建所,王洪亮
(1.云南锡业锡化工材料有限责任公司,云南蒙自 661019;2.昆明理工大学民航与航空学院,云南昆明 650504)
0 引 言
在工业温度控制中,PID(比例-积分-微分)控制器是一种广泛应用的控制策略,它在调节系统中具有重要的地位。然而,PID 参数的选择通常需要经验和实验,因为它们受到系统的复杂性、动态性质以及外部干扰的影响,然而在使用经典的Z-N 法进行PID 参数整定时很难得出最优的PID 参数。近年来新型智能算法层出不穷,如粒子群优化算法[1]、鲸鱼优化算法[2]、灰狼算法[3]、海鸥优化算法[4]等,因其各自的特性运用于各类优化问题中。众多学者针对这项问题,提出使用优化算法对PID 参数进行整定,例如,文献[5]提出基于改进SOA 算法对PID 参数进行自整定,其改进的控制系统相较于传统控制算法有更加良好的控制性能;文献[6]提出基于PPO 的自适应PID 控制算法,并通过验证表明,在遇到扰动已经震荡的情况下相较于传统的PID 算法有着更加平缓的控制过程;文献[7]将深度强化学习TD3 引入到PID 参数整定中,该算法通过神经网络能够取得更优的控制策略,有效提升了控制器的动态响应性能和鲁棒性;文献[8]设计了基于Markov 参数自整定的单神经元自适应PID 迭代学习控制策略,有效提高了控制器对温度的精确跟踪。
鲸鱼优化算法(Whale Optimization Algorithm, WOA)是2016 年由澳大利亚学者Mirjalili 和Lewis 提出的新型群智能优化算法[9]。WOA 与其他算法对比具有参数少、易实现、稳定性高等优点,目前已有众多学者对该算法做出了改进,例如文献[10]引入反向震荡变异策略改进WOA 算法的位置更新策略,增加了算法的全局搜索能力;文献[11]将PSO 算法引入到WOA 算法,减小了算法陷入局部最优的情况;文献[12]提出将多维度变异学习机制引入对种群进行变异操作,扩大了算法的搜索范围;文献[13]将黄金正弦算法引用到WOA 的位置更新策略中,加快了算法的收敛速度以及求解精度。
尽管WOA 在优化问题上表现出色,其性能在PID控制器整定中的应用仍然需要进一步改进。本文针对这一问题提出了一种改进的WOA 算法,通过引入非线性收敛因子和正余弦扰动因子以提高算法在PID 控制器参数整定中的性能表现。通过化工反应中常见的温度PID 控制器优化问题的仿真实验对比结果表明,IWOA 算法的优势明显。
1 基本鲸鱼优化算法原理
鲸鱼优化算法是模仿座头鲸的狩猎行为进而提出的一种新型启发式优化算法。在WOA 算法中,每一只座头鲸在空间中的位置都代表一个算法的解,根据座头鲸的狩猎策略,其狩猎行为主要分为包围、狩猎、搜索猎物三个步骤。其在包围时的数学模型如公式(1)、公式(2)所示:
式中:D为猎物与黑猩猩之间的距离;t为当前迭代次数;A、C为系数向量;XP为猎物的位置向量;XC为黑猩猩的位置向量。A和C向量分别由式(3)和式(4)表示为:
式中:r1和r2是取值为[0,1]的随机数;参数A为[-2a,2a]之间的随机变量,a为线性衰减因子,数值大小随迭代次数的增加由2 线性衰减到0,如式(5)所示:
式中:t为当前迭代次数;T为最大迭代次数。
座头鲸种群在进行狩猎行为时,是以螺旋式运动方式朝猎物接近,其进行狩猎时的数学模型公式如式(6)所示:
式中:XP(t)为当前位置的种群最优位置;b为螺旋线形状调节参数;l为[-1,1]间的随机数;DP为座头鲸与猎物之间的距离,即:
在原始鲸鱼优化算法中,为了解决在求解高维问题时容易陷入局部最优以及收敛过慢的问题,采用随机收缩包围机制和更新种群位置的机制,其数学模型如公式(7)所示:
式中μ为[0,1]之间的随机数,该数学模型表示有β的概率选择使用收缩包围机制更新位置,有1 -β的概率选择使用螺旋模型更新种群的位置。
在座头鲸搜索猎物时,所采用的数学模型如下所示:
在此数学模型中,Xrand(t)表示随机确定的座头鲸位置向量,为了加强算法的侦察能力,在该算法中规定,当A>1 时随机选择一个座头鲸的位置作为引导来更新种群位置,以此使得整个种群偏离当前猎物位置,以便找到更加合适的猎物。
2 改进鲸鱼优化算法
2.1 改进收敛因子
在WOA 算法中其全局侦察以及局部开发能力由A决定,而A数值的大小由收敛因子a决定,而在原算法中收敛因子a是由最大值到最小值线性减小的,该变化方式不利于对算法的全局侦察以及局部开发能力的权衡。因此,本文根据WOA 算法中各个鲸鱼种群的特点,为保证算法前期迭代过程中对于种群的大范围搜索能力以及在迭代后期对于全局最优解求解效果的均衡性,提出非线性收敛因子的改进方案。WOA 算法中收敛因子公式如式(10)所示:
非线性收敛因子与原算法中线性收敛因子的比较如图1 所示。
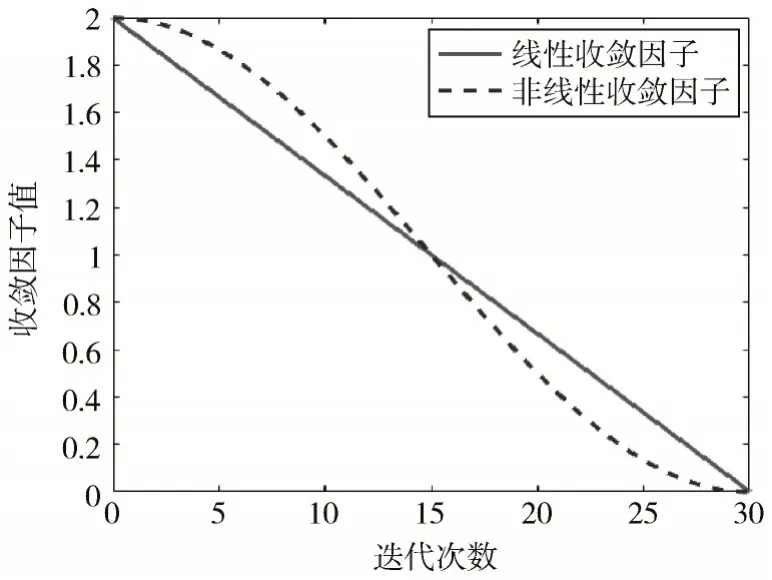
图1 线性收敛因子与非线性收敛因子曲线图
2.2 引入正余弦扰动因子改进位置更新策略
在标准的鲸鱼优化算法中,每个座头鲸的位置主要根据每次迭代进行更新,但当陷入局部最优时,会导致大量的种群聚集在这片区域中,使得算法无法搜索更多区域外的空间。为了避免这种现象的发生,本文提出将正余弦扰动因子引入到位置更新策略中,通过加入扰动的情况,加强算法跳出局部空间的能力,提高了算法的勘察能力,避免陷入局部最优的情况。其正余弦扰动因子的迭代曲线如图2 所示。
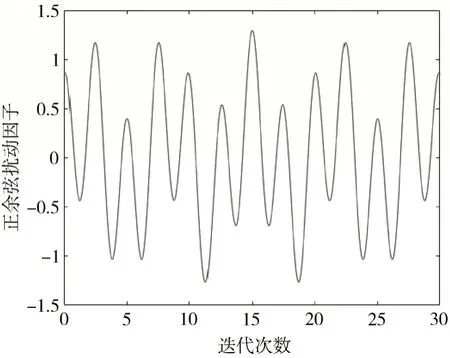
图2 正余弦扰动因子分布图
利用正余弦因子随着迭代动态变化的不确定性,对座头鲸种群在进行位置更新时产生不同程度的扰动,使得座头鲸种群在进行位置更新时能够在更加宽阔的空间内进行搜索,扩大了种群的搜索范围,也避免了过多座头鲸种群集中搜索导致局部最优的情况。其中正余弦扰动因子的数学模型如公式(11)所示:
式中:r3、r4为[0,1]之间的随机数;λ为扰动因子控制参数。
引入正余弦扰动因子后,鲸鱼优化算法的位置更新公式如式(12)~式(14)所示:
2.3 IWOA 算法
改进引入非线性收敛因子和正余弦扰动因子的WOA 算法的具体执行步骤如图3 所示。
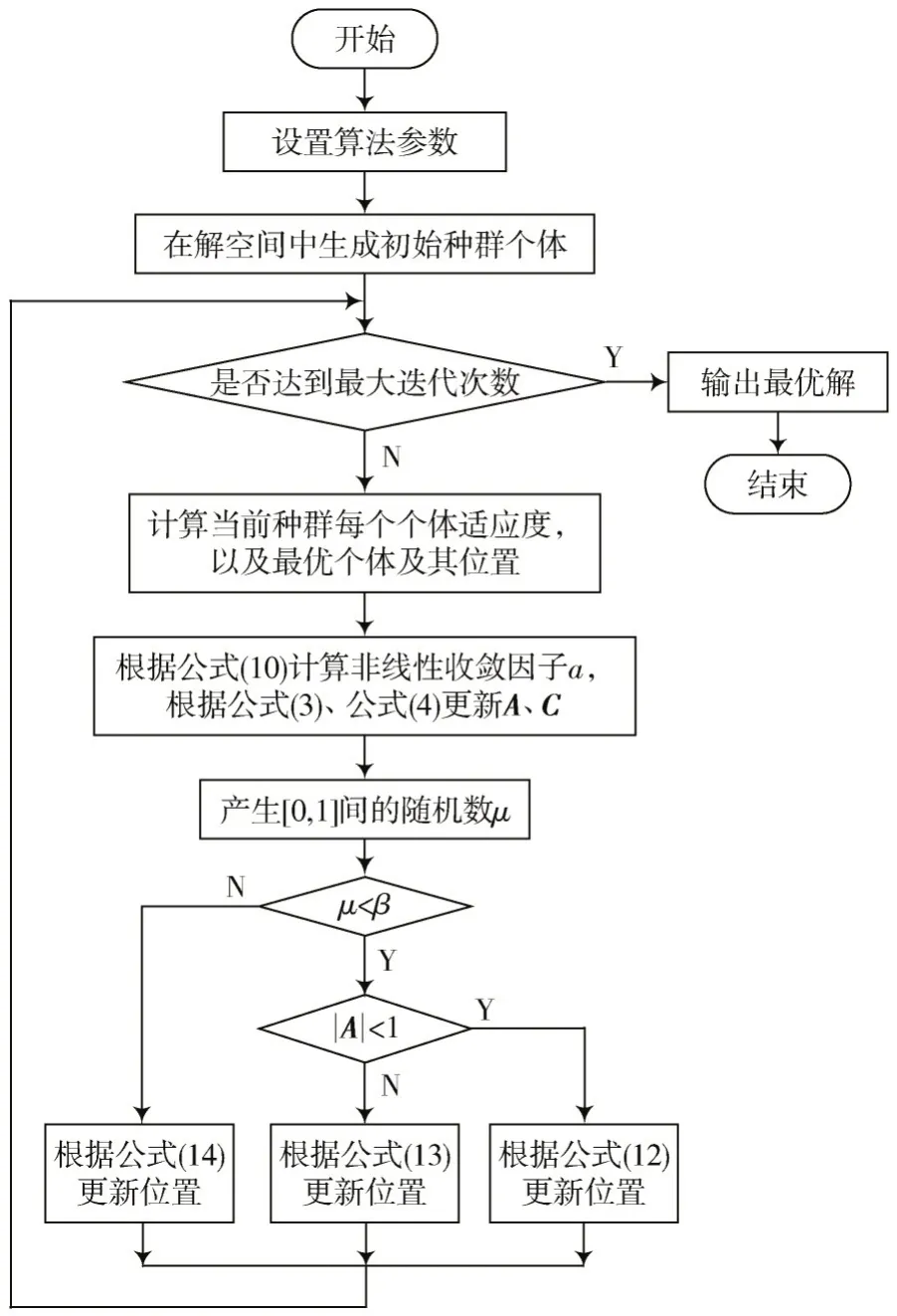
图3 IWOA 算法流程图
3 反应釜温度系统控制模型
本文利用WOA 算法优化PID 控制器中的比例系数Kp、积分系数Ki、微分系数Kd,3 个参数使系统达到最佳的控制效果,基本框图如图4 所示。
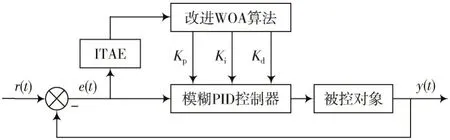
图4 IWOA 自整定PID 参数原理图
本文为将控制系统的动态性能指标调节至满意值,通过对控制系统阶跃响应的反馈信号采集得出偏差信号,取其绝对值与时间乘积的积分(ITAE)作为算法的适应度函数,数学模型为其中,e(t)为反馈误差信号。
4 控制系统仿真与分析
由于大部分工业温度控制系统是复杂的高阶且带有延迟的系统,许多系统常常被近似为一阶惯性和二阶振荡的典型叠加系统。在本文中为测试改进算法的性能,选择文献中二阶惯性带有纯延迟的系统作为被控对象,通过Matlab 模拟进行PID 整定仿真。该系统的传递函数为:
设改进WOA 算法的种群规模为50,迭代次数为30,Kp、Ki、Kd参数的搜索值域为[0,10],设置单位阶跃输入作为信号输入,采样间隔为5×10-2,仿真时间为10 s。其仿真结果与Z-N 整定算法、PSO 算法、WOA 算法的对比图如图5 所示,性能参数如表1 所示。
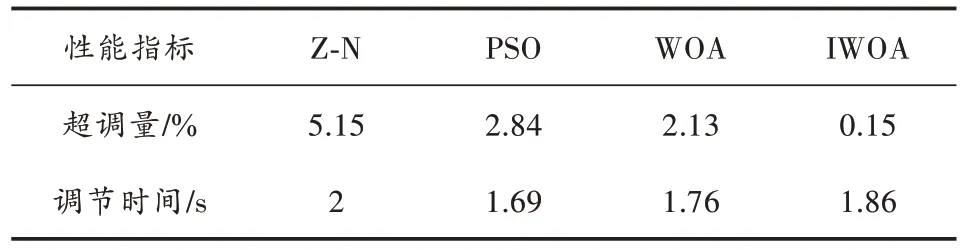
表1 算法性能参数对比
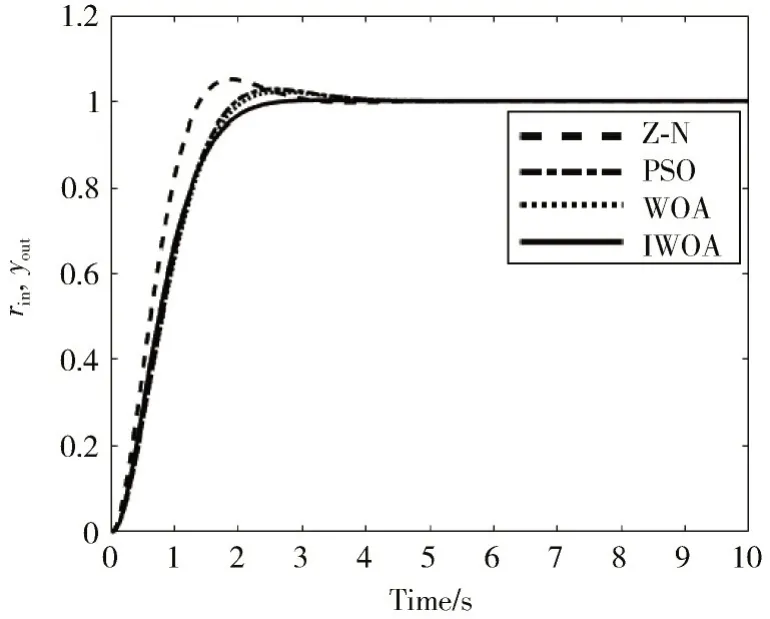
图5 算法对比图
对图5 和表1 分析得知:在使用Z-N 整定算法时,超调量最大,且为5.15%,调节时间为2 s;使用PSO 算法时,超调量为2.84%,调节时间最短,为1.69 s;使用WOA 算法进行PID 整定时,其响应曲线的超调量为2.13%,调节时间为1.76 s;在使用IWOA 算法进行PID整定时,其响应曲线超调量最小且仅为0.15%,调节时间为1.86 s。
5 结 语
通过仿真实验结果得知,本文提出的IWOA 算法相比其他算法进行PID 整定时,能够以更小的超调量以及牺牲较少的调节时间达到预期的控制效果,说明在IWOA 算法下的快速性以及稳定性相对更好,对于控制工程中高阶且带有非线性延迟环节的系统相比其余算法有着更好的性能效果。
注:本文通讯作者为王洪亮。
猜你喜欢
幼儿100(2022年41期)2022-11-24
青少年科技博览(中学版)(2022年9期)2022-11-01
数学大王·趣味逻辑(2020年9期)2020-09-06
小天使·二年级语数英综合(2019年4期)2019-10-06
第二课堂(小学版)(2019年7期)2019-07-16
动漫星空(2018年4期)2018-10-26
金色少年(奇趣科普)(2017年1期)2017-03-03
中学数学杂志(高中版)(2016年6期)2017-03-01
中国科技信息(2016年12期)2016-08-29
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27