基于深度学习的点云分割与洪水风险模拟方法
2024-04-04 15:40姜佩奇伍杰张社荣来亦姝刘康王超
水科学进展 2024年1期
关键词:深度学习
姜佩奇 伍杰 张社荣 来亦姝 刘康 王超

摘要:传统的洪水风险分析方法由于计算时长、数据不足和难以适应地形变化等,限制其在快速应急响应中的应用,亟需对大场景洪水进行快速预测建模与分析。本文推出一种融合大场景点云分割与深度学习的洪水风险快速模拟方法,通过数据采集与预处理、点云分割、重建数字高程模型和水动力学模拟,在中国南水北调工程的局部地区进行实证研究。结果表明,提取原始地面特征的平均交并比和总体分类精度分别高达70.8%和88.7%,洪水模拟设计与校核情景下的最大淹没面积分别为7.0万m2和10.5万m2。该方法为洪水风险快速评估提供了新方法,可提高洪水风险测绘的建模效率和分析精度。
关键词:洪水风险;点云分割;深度学习;DEM重建;水动力学模拟
中图分类号:TV213.4 文献标志码:A 文章编号:1001-6791(2024)01-0062-12
近年来,洪水风险分析和快速建模已成为研究热点[1-5]。洪水是全球范围内广泛存在的自然灾害之一,自1995年起,洪水灾害已威胁到23亿人,占所有自然灾害的43%[6-7]。其中,洪水模拟对预防洪灾具有关键作用,但对数字高程模型(DEM)的依赖性很强[8],DEM的精度和分辨率严重影响到淹没面积、流速、淹没深度、流态等模拟结果,特别是在低洼或平坦地区绘制洪水风险图需要更高精度的DEM[9-11]。因此,许多研究者探索了多种基于传统技术和深度学习技术的建模方法。在传统技术方面,Xing等[12]采用GIS进行DEM校正,以提升城市级的洪水模型性能,通过调整城市要素表示更真实的模拟洪水路径;Xiao等[13]运用InVEST模型结合GIS,评估了生境质量及其对地形梯度的响应,提高DEM数据在多变地形的适应性。另外,深度学习技术因其在处理图像数据上的强大性能,已经在多个研究中用于高分辨率地形地貌图像的合成和优化:唐小川等[14]基于山体阴影图,通过多模态深度学习构建去除植被的DEM,能够在气候较好时准确预测;师鹏飞等[15]将相空间重构与深度学习相结合,减少了对大量训练数据的需求;Yu等[16]展示了基于深度学习的多视角航拍图像自动重建三维建筑;Li等[17]将地形知识整合到深度学习中处理DEM空白的填充问题。这些方法在某些特定场景中取得了良好的效果,但由于城市化和人类活动,许多集水区的地表径流和暴雨强度发生了显著改变,且大场景的地形地貌复杂,具有地理范围广泛、气候多变、地物种类繁多、不可预测等特点,造成DEM动态重建困难,无法及时准确地反映当前实际地形地貌和径流特征变化。
目前,重建3D环境特征方法主要有激光雷达(Light Detection and Ranging,LiDAR)和倾斜摄影。为提高DEM的重建精度,在无人机上安装激光雷达设备或光学相机,通过高精度航测来收集3D环境特征[18-19],与LiDAR点云相比,倾斜摄影得到的点云具有采集成本低、密度高、颜色信息和建筑立面信息全等优点[20],适用于需要快速响应和高效分析的洪水风险评估场景。在洪水风险分析中,需要根据点云分割结果将各种物理参数赋值给几何模型。因此,需要从点云中提取语义信息和几何信息。对于语义分割,有很多自动语义分割算法用来进行点云分割。例如,使用全卷积网络进行点云分割,将点云转换为大量图像,其平均误差为5.2%[21]。在点状几何特征提取方面,深度学习被广泛应用于语义分割,用于三维点云语义分割的网络包括Voxnet、PointNet、PointNet++等[22-25],这些方法主要应用于建筑环境的语义分割[26],可用于小规模点云分类且计算效率较低,不适用于大尺度洪水建模分析。另外,对重点区域需要进行网格细化,提高模拟精度,当前研究主要侧重于手动或半自动网格生成技术,这些方法通常需要大量的计算时间和专业知识[27]。
本文提出一种基于大场景点云和深度学习的洪水风险分析快速模拟方法,探索一种洪水模拟DEM的快速建模方法来提取当前地形和地面覆盖信息,以提高地形地貌重建的准确性和效率。
1 研究方法
1.1 洪水风险分析快速模拟方法
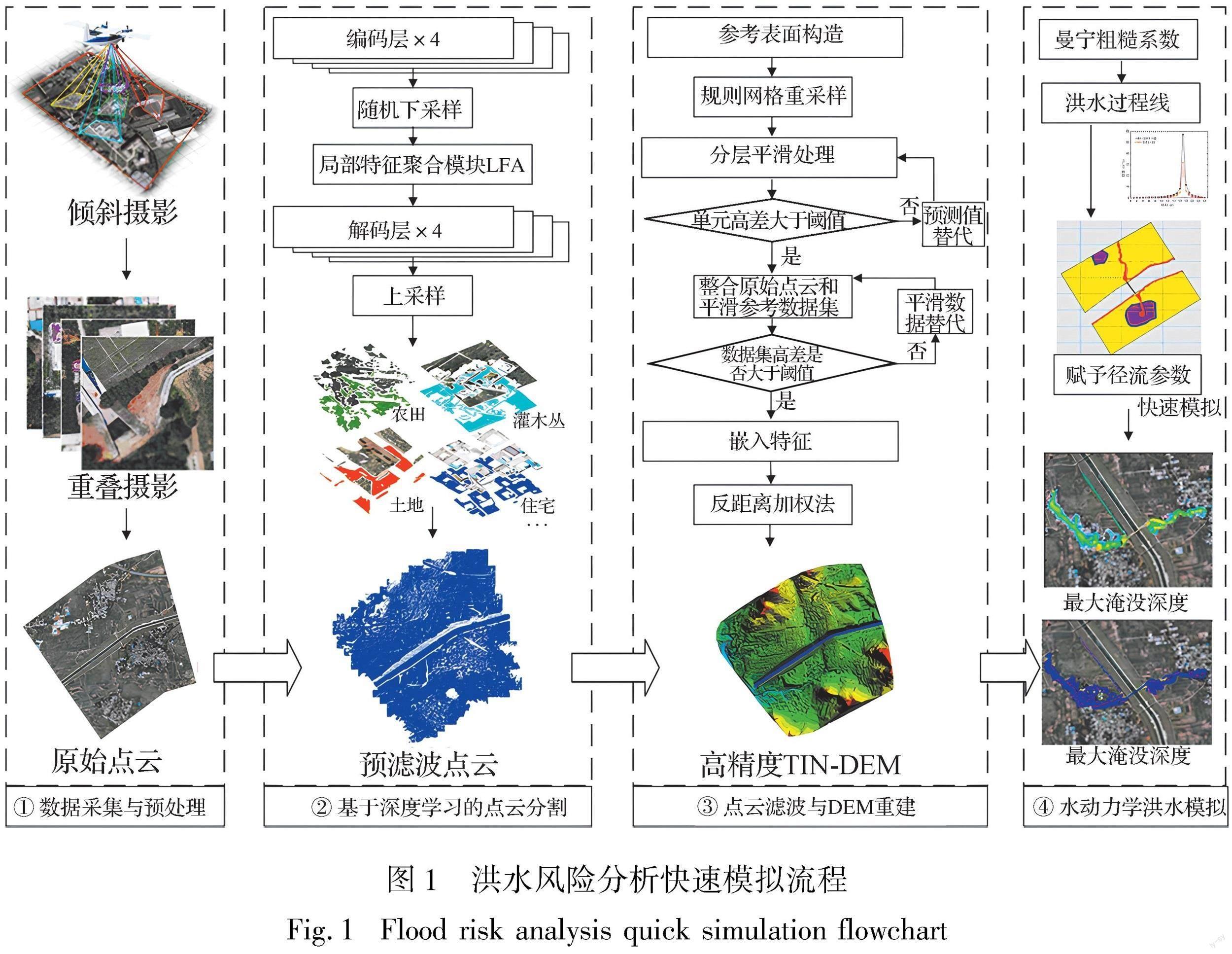
本文提出洪水风险分析快速模拟方法,共4个步骤,如图1所示。采用无人机倾斜摄影获取重叠影像,得到研究区域原始点云,进一步利用编码层和解码层对原始点云进行分割,得到原始地面点云。在此基础上创新地进行点云滤波和DEM重建建立高精度TIN-DEM,用于快速、高精度洪水模拟。
(1) 数据采集与预处理。采用基于无人机的斜摄方式获取垂直影像和倾斜影像,采集到的数据格式为.las,包括三维坐标、颜色、强度信息等。
(2) 基于深度学习的点云分割。创新性地采用基于RandLA-Net深度学习的编码器-解码器网络进行点云分割,从中提取地面、植被和建筑物等关键要素以便为洪水模拟分配适当的径流参数。用于洪水风险分析的点云数据通常具有区域广、规模大、数量多等特点。点云一般分为6种类型:住宅用地、地面、农田、道路、灌木丛地和混凝土。
(3) 点云滤波与DEM重建。高精度DEM是进行洪水模拟的基础。本文提出一种改进的高精度DEM重建技术方案。首先根据分割结果对原始点云进行预过滤,剔除住宅用地、灌木丛和混凝土等点云;然后创新性地通過平面拟合求交法提取地形特征线,以地形特征线作为地形的骨架,更准确地描述山地地形的突变规律;最后对特征线进行积分,重建高精度DEM,并采用反距离加权法对潜在的洪水路径点进行加密[28]。
(4) 基于水动力学的洪水模拟。将TIN格式的高精度DEM导入Mike21软件,利用Mike21软件的自动化网格功能,分区生成网格,并根据点云分割结果赋予不同的曼宁粗糙系数。其中,模型设置一般是通过自动化脚本实现的。
1.2 基于深度学习的点云分割方法
RandLA-Net结构如图2所示,其中(N,D)的N表示点云中独立的点数,D表示每个点的特征维数,如空间坐标的特征维数是3。将点云(N,3)传输到全连接层,使用4个编码层和解码层来学习各点的特征;利用3个带有丢弃层的全连接层来预测每个点的语义标签。此外,引入的局部特征聚合(LFA)模块来逐渐增加每个3D点的接受域来保留复杂的局部结构[29];通过4个解码层,使用K-最近邻算法找到每个点的最近邻点,采用最近邻插值法对特征进行上采样,即基于已知点的位置和特性来估计新点的位置和特性,从低分辨率提升到高分辨率;利用跳跃连接编码层生成的中间特征映射,与这些向上采样的特征连接起来,然后传输到共享多层感知器;利用3个带有丢弃层的全连接层来预测每个点的语义标签N×nclass,其中nclass表示输入点云中的类数。
LFA模块包括局部空间编码、注意力池和扩张残差块。操作步骤如下:
(1) 寻找相邻点。对于第i点,首先采用K-最近邻算法,进行逐点欧氏距离聚类。
(2) 相对点位置编码。对于领域点{pi,1,pi,2,…,pi,k},与中心点pi的相对位置由式(1)显式编码。
1.3 点云滤波与DEM重建
本文提出了一种基于分层平滑法的改进算法,通过利用参考表面构造和动态调整,确保均匀数据处理,提高DEM的精度。同时,结合分层平滑和特征线的点云加密技术,算法在处理复杂地形和多变场景时展现出优越的鲁棒性,具体如下:
步骤1:参考表面构造。采用规则网格对点云进行重采样,利用成熟的图像滤波理论形成参考数据集。其中,为了避免原始点云的精度损失,生成的参考数据集只作为阈值面,后續的滤波过程仍然使用原始点云进行。
步骤2:分层平滑处理。对于参考数据集的每个网格单元,取网格单元中各点的平均垂直坐标值(或高度)作为单元值。然后,采用分层平滑方法对参考数据集进行平滑处理,如式(2)和(3)所示。若中心单元值与4个方向上网格单元最小值的高差大于阈值,中心单元值将被预测值取代,否则,中心单元保持初始值。
式中:Z[i,j]为网格单元值;pk为网格单元中的一个点;n为网格单元中的总点数;Z1、Z2、Z3、Z4分别为网格单元在4个方向的预测值;Δh和Th分别为高差和阈值;h0为最小高差;Sw为数据集的分辨率;ε为范围从0到1的比例因子。
接着,通过整合原始点云和平滑参考数据集,生成分辨率更高的新数据集。若新数据集与平滑参考数据集的高差大于阈值,则新的网格单元值将被平滑参考数据集的相应值替换。最后,重复上述步骤,直到数据集分辨率小于阈值。在此过程中,数据集分辨率随着阈值的变化而变化,分辨率越高,阈值要求越严格。
步骤3:嵌入特征的DEM重建。为提高山区的DEM重建精度,本文采用平面拟合相交法提取山区地形特征线[10-11],并将局部区域分为两部分。然后,利用反距离加权法对地形特征线周围的地面点加密[9,11]。具体的致密方法如式(4)所示。
式中:Wi为半圆中每个已知地面点的权值;di为已知地面点与当前待加密位置之间的距离;hi和hj分别为半圆内每个已知地面点的高程和当前待加密位置的高程;S为用于致密的已知地面点数量。
以地形特征线上的点为圆心,搜索半径为R的半圆,在地形特征线上的一侧生成搜索半圆进行点云致密。本文中S默认为12。如果搜索半圆内的已知地面点达不到S,则会动态调整搜索半圆半径,直到已知地面点达到S。同理,对地形特征线的另一侧进行地面点致密处理,以及对潜在的洪水路径区域和剔除非地面点导致的点云孔洞进行地面点致密处理。
最后进行高精度DEM重建。基于Delaunay算法,采用逐点插入和增长算法将离散点云连接成三角网络。对于地形特征线或不同地面覆被的边界线(如建筑物、农田、住宅用地等),通过插值线两侧点的高程计算插入节点的高程。
2 研究区域和数据源
2.1 研究区域概述
研究区域为位于中国河北省保定市的刘庄沟。南水北调工程截断了这条沟渠,在距离刘庄西村500 m处修筑排水渡槽泄洪,是南水北调中线工程总干渠与刘庄沟交叉的左岸排水建筑物,工程位置处总干渠京石段。根据设计报告,刘庄沟属于一条无监测资料的小河,汇水区域约1.80 km2,排水面积约1.40 km2。渡槽的孔洞尺寸为8.00 m×2.10 m(宽×高)。根据研究区域对应的《河北省中小流域设计洪水暴雨图集》中南水北调24 h雨型分配表,设计洪水(50 a重现期)和校核洪水(200 a重现期)的洪峰流量分别为32.2 m3/s和56.9 m3/s。各频率洪水过程均采用24 h,对于水文实测资料不足或无资料的地区,流域集水面积大于50 km2的采用瞬时单位线法,小于50 km2采用推理公式法求解,刘庄沟设计洪水过程线如图3所示。
本文基于倾斜摄影系统的多视角成像建立3D模型,能够为实地探测和改进水动力建模提供高分辨率的径流和环境信息。图4为刘庄沟研究区概况。
研究发现,该区域西北部和东南部的地形均以山区为主。引水工程的主干渠位于山区之间,主干渠两侧分布着居民和农田。若突发暴雨,山区形成的洪水就会沿天然河道流经主干渠,威胁附近的村庄。此外,由倾斜摄影得到的模型可以看出,大部分天然河道被农田和杂草占据,甚至在渡槽出口处存在废弃土堆,这将进一步限制渡槽的泄洪,危及居民的生命财产安全。因此,有必要对当前泄洪能力进行核查,表1列出了与不同地面覆被相关的曼宁粗糙系数。
2.2 建立数据集
图4为倾斜摄影得到的点云,用以验证本文提出方法的有效性。测试区域的平均点密度为25点/m2,长约2 116 m,宽约2 016 m,面积约4.265 km2,高程起伏高达115.6 m。该数据集包含丰富的地理环境、城市建筑和不同类型的对象等元素,能够充分验证RandLA-Net对重点特征的分割能力及其在洪水风险分析中应用的可行性。点云总共由6种类型的地物组成,包括住宅用地、灌木丛地、地面、农田、道路和混凝土。通过对点云数据进行手动标注后,提取属于这6类地面特征的点。为了便于RandLA-Net的训练和测试,数据集的格式参照S3DIS标准设定,包含了点的标签、坐标和颜色信息。
本文选取了10个大场景点云作为实验数据集。为避免过拟合,通过10倍交叉验证的方法来评估RandLA-Net对点云的分割性能。在10倍交叉验证方法中,首先将数据划分为10个子集,其中,9个子集用于训练网络,剩下的1个子集作为测试数据用于网络性能评估。将步骤重复10次,直至所有子集都有机会被用作测试数据。由于交叉折叠验证的k(最近点数量)设为10,因此将数据集的训练集和测试集比例划分为9∶1。
3 结果与讨论
3.1 基于深度学习的点云分割
本研究数据集训练和测试期间的实验环境是在LinuxUbuntu18.04操作系统上使用TensorFlow的深度学习框架。在训练阶段,将k设置为16,采用Adam优化器训练网络。网络的初始学习率设置为0.01,每次迭代后学习率下降5%。然后,设置批量大小为4,对RandLA-Net进行50次迭代训练。训练和测试都是在一台配备了IntelCoreTMi7-10700KFCPU @3.80 GHz、64 GB DDR4和2个Nvidia GeForce RTX3070 GPU显卡的计算机上进行的。
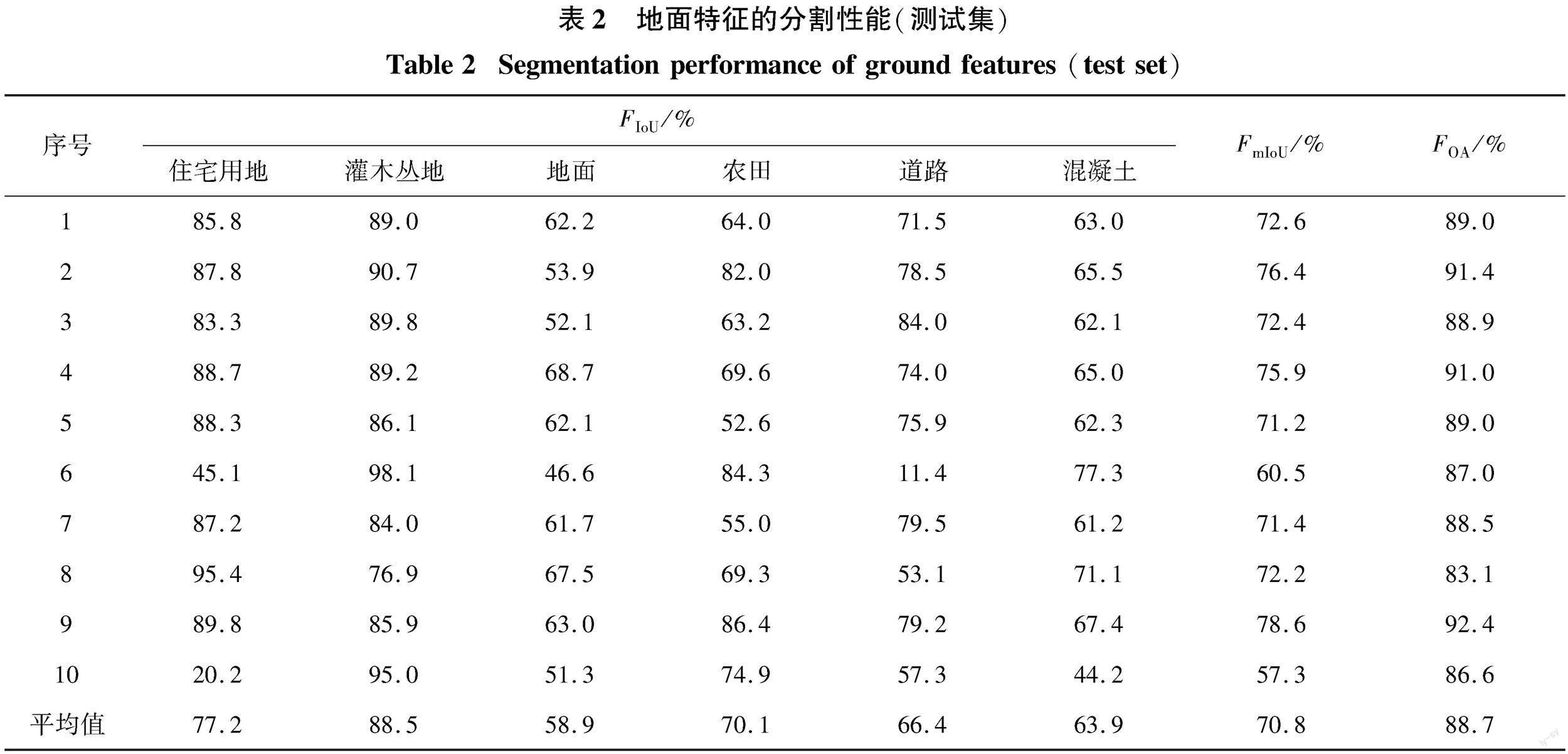
以图4中的4个研究区域(区域1—区域4)为例,图5描绘了使用RandLA-Net进行点云分割的一些定性结果。通过对比图5中不同地表覆盖物的预测结果和实况可以看出,RandLA-Net对于重点的地面特征具有更好的分割性能,适用于大场景区域下的点云语义分割,如洪水风险分析项目。在3D点云语义分割领域,用于评估分割方法性能的2个主要指标是真实值和预测值的平均交并比(FmIoU)和总体分类精度(FOA),分别可根据式(5)和式(6)计算。因此,本文中每类点云的评估指标均采用FmIoU和FOA,如表2所示。
式中:k+1为包含背景的总类点数;pii为分类和标记为i类的总点数;pij为分类为i类但标记为j类的点数;pji为分类为j类但标记为j类的点数。
从表2可以看出,当点云数据中存在多种地物时,通过比较交并比(FIoU)、FmIoU和FOA的指标发现RandLA-Net对建筑物、灌木林地和农田都有很好的分割效果,这3种地物的FIoU均值均超过70%。其原因主要是由于数据集包含大量建筑物、灌木林地和农田,网络在训练阶段能够更好地学习这3个地物的特征,错误分类概率较低。另外,RandLA-Net在分割地面、道路和混凝土方面的效率较低。一方面是由于地面和道路外观相似,难以区分;另一方面是因为数据集中渡槽建筑数量过少,使得网络无法很好地学习混凝土的深层特征。
3.2 点云滤波与DEM重建
为提高计算效率,在分割结果基础上对原始点云进行预过滤,去除住宅用地、灌木丛地和混凝土结构的点云。然后,将保留的点云发送到分层平滑滤波器,进一步获得地面点和地形信息。基于分层平滑方法进行初步滤波后的点云结果如图6(b)所示。很明显,分布在山顶山坡和低洼地区的非地面点能够正确滤波,表现为分散的空洞。然后,利用滤波后的点云,通过反距离加权法重建高精度DEM,期间采用平面拟合与相交法提取的地形特征线来提高DEM重建精度。如6(c)所示,利用地形特征线重建DEM的精度得到了显著提高,特别是在地形特征所在的山坡地区。在复杂地形条件下,能够清晰表达山地地形和地形特征线两侧的地形差异。
地形特征线对DEM重建也有显著影响。图7(c)、图7(d)为是否嵌入地形特征的致密化地面点云对比结果。显然,用于建模的高度点是不均匀分布的,因此,有地形特征嵌入生成的斜坡或山區呈现出不规则的锯齿形。对于地形变化复杂的地区,无地形特征嵌入的重建DEM无法准确地反映地形地貌,甚至部分区域因缺乏高程信息而出现地形凹陷的现象。
此外,为验证所提方法的精度优势,与采用层次平滑法直接过滤得到的点云重建的DEM进行比较。如图7(f)所示,如果保留地面覆盖点,将会明显限制DEM重建,地形上的驼峰会在后续水动力分析中阻碍洪水。因此,在进行洪水模拟前,对地面覆盖点进行过滤使其恢复到自然地面地形非常重要。在本研究中,通过反距离加权法进行插值来恢复地面覆盖物去除后产生的分散空洞,恢复后的地形如图7(g)所示,该方法能够更好地提取真实的地表形态。同时,在洪水模拟中设置不同的曼宁粗糙系数来模拟地面覆盖引起的水阻塞效应。
3.3 基于水动力学的洪水模拟
Mike21是一款专业的洪水模拟软件。3.2节所述的高精度DEM可作为几何模型直接导入软件。模拟模型的重点区域大小为1 300 m×1 000 m(长×宽),覆盖了以渡槽为中心的汇水区和排水区。入流边界设置在河道上游。使用Mike21中的自动网格创建功能生成自适应网格。另外,为满足计算精度的要求,需根据点云分割结果中的地表覆盖类型进行网格划分。例如,山区和潜在洪水路径区域分别采用5~10 m和1~2 m的高精度网格,其他区域采用10~15 m的粗网格。然后,基于坐标映射法,根据表1为不同的地表覆盖物网格赋予对应的径流参数,图8为模型参数赋值结果。
本文考虑了设计洪水(50 a重现期)和校核洪水(200 a重现期)2种情景,最大淹没水深和对应的流速如图9、图10所示。显然,渡槽能够排泄设计和校核情景下的洪水,但大多天然河道已被人类活动改变,当发生洪水时仍然有部分村庄和农田被淹没。此外,设计洪水情景下和校核洪水情景下的最大淹没面积分别约为7万m2和10.5万m2。设计洪水情景下最大淹没深度约为3.0 m,位于距离渡槽出水口200 m的下游村庄,在校核洪水情景下最大淹没深度在4.0 m左右。另外,在最大淹没范围瞬间,大部分淹没区流速小于0.4 m/s,其中设计和校核洪水最大流速分别接近1.2 m/s和1.6 m/s,沿天然河道分布。研究区域的河道截面形态不规则,最大河道宽度和最小河道宽度之比为20∶1,且河道蜿蜒曲折,河道中存在渡槽,影响了河道的泄水能力;且河床主要由细粒泥沙构成,渡槽中及其出口附近存在大量泥沙堆积,这说明天然河道在设计洪水和校核洪水下存在冲刷风险。
4 结 论
(1) 本方法通过倾斜摄影采集河北省保定市刘庄沟区域的大场景点云,使用RandLA-Net模型高效分割,并通过分层平滑法重建高精度DEM,自动、准确重构原始地面特征,为洪水模拟提供可靠的地形信息;并在重点区域上自动创建网格并设置径流参数,进行高精度、快速洪水模拟。可计算研究区域洪水演进信息包括面积、深度和速度。
(2) 洪水演进的准确性依赖于DEM准确性,基于重建的DEM,进行设计洪水与校核洪水情景模拟,结果与原始地面数据吻合度较高,能够反映真实地形。
(3) 模拟结果揭示潜在的洪水路径和影响范围,尽管渡槽能排泄洪水,但渡槽周围区域和部分村庄和农田仍遭淹没,能指导洪水防御策略和应急预案的制定。
参考文献:
[1]劳聪聪,辛沛,左寅,等.1996—2020年长江口九段沙湿地植被覆盖对潮沟演变规律的影响[J].水科学进展,2022,33(1):15-26.(LAO C C,XIN P,ZUO Y,et al.Effect of fractional vegetation cover on the evolution of tidal creeks of the Jiuduansha shoal in Yangtze River Estuary (China) during 1996—2020[J].Advances in Water Science,2022,33(1):15-26.(in Chinese))
[2]张红萍,李敏,贺瑞敏,等.城市洪涝模拟应用场景及相应技术策略[J].水科学进展,2022,33(3):452-461.(ZHANG H P,LI M,HE R M,et al.Application scenarios and corresponding technical strategies of urban flood modeling[J].Advances in Water Science,2022,33(3):452-461.(in Chinese))
[3]王倩雯,田健,曾坚,等.基于情景模拟的闽三角城市群承洪适灾网络构建及规划响应策略[J].水利学报,2022,53(7):876-889.(WANG Q W,TIAN J,ZENG J,et al.Construction of flood adaptation network and planning response of strategy urban agglomeration inthe Min Delta based on scenario simulation[J].Journal of Hydraulic Engineering,2022,53(7):876-889.(in Chinese))
[4]方浩泽,杨中华.淹没植被和河床吸收边界对湿地污染物输移影响[J].水科学进展,2023,34(1):126-133.(FANG H Z,YANG Z H.Effects of submerged vegetation and bed absorption boundary on pollutant transport in wetland[J].Advances in Water Science,2023,34(1):126-133.(in Chinese))
[5]ZHOU S,YU B F,ZHANG Y.Global concurrent climate extremes exacerbated by anthropogenic climate change[J].Science Advances,2023,9(10):1638.
[6]黃艳,喻杉,罗斌,等.面向流域水工程防灾联合智能调度的数字孪生长江探索[J].水利学报,2022,53(3):253-269.(HUANG Y,YU S,LUO B,et al.Development of the digital twin Changjiang River with the pilot system of joint and intelligent regulation of water projects for flood management[J].Journal of Hydraulic Engineering,2022,53(3):253-269.(in Chinese))
[7]刘宁.大江大河防洪关键技术问题与挑战[J].水利学报,2018,49(1):19-25.(LIU N.Problems and challenges on flood control for large rivers[J].Journal of Hydraulic Engineering,2018,49(1):19-25.(in Chinese))
[8]刘天雪,王瑛,陈笑娟,等.DEM分辨率对山洪淹没模拟影响[J].水资源与水工程学报,2021,32(4):156-163.(LIU T X,WANG Y,CHEN X J,et al.Effects of DEM resolution on flash flood inundation simulation[J].Journal of Water Resources and Water Engineering,2021,32(4):156-163.(in Chinese))
[9]HUANG H C,LIAO W H,LEI X H,et al.An urban DEM reconstruction method based on multisource data fusion for urban pluvial flooding simulation[J].Journal of Hydrology,2023,617:128825.
[10]李建柱,李磊菁,张婷,等.DEM数据源及分辨率对流域洪水模拟影响研究[J].水力发电学报,2023,42(3):26-40.(LI J Z,LI L J,ZHANG T,et al.Effect of DEM data sources and resolutions on watershed flood simulations[J].Journal of Hydroelectric Engineering,2023,42(3):26-40.(in Chinese))
[11]程涛,黄本胜,邱静,等.基于UAV精细化地表数据的城市洪涝模拟与分析:以济南市海绵城市示范区为例[J].水力发电学报,2021,40(5):110-124.(CHENG T,HUANG B S,QIU J,et al.Urban flood simulation and analysis using UAV-based refined surface data.Case study for sponge city pilot area of Jinan City[J].Journal of Hydroelectric Engineering,2021,40(5):110-124.(in Chinese))
[12]XING Y,CHEN H L,LIANG Q H,et al.Improving the performance of city-scale hydrodynamic flood modelling through a GIS-based DEM correction method[J].Natural Hazards,2022,112(3):2313-2335.
[13]XIAO P N,ZHOU Y,LI M Y,et al.Spatiotemporal patterns of habitat quality and its topographic gradient effects of Hubei Province based on the InVEST model[J].Environment,Development and Sustainability,2023,25(7):6419-6448.
[14]唐小川,涂子涵,任绪清,等.一种识别植被覆盖滑坡的多模态深度神经网络模型[J/OL].武汉大学学报(信息科学版).(2023-08-30)[2023-09-01].https:∥doi.org/10.13203/j.whug is 20230099.(TANG X C,XU Z H,REN X Q,et al.A multi-modal deep neural network model for forested l andslide detection[J/OL].Geomatics and Information Science of Wuhan University.(2023-08-30)[2023-09-01].https:∥doi.org/10.13203/j.whug is 20230099.(in Chinese))
[15]師鹏飞,赵酉键,徐辉荣,等.融合相空间重构和深度学习的径流模拟预测[J].水科学进展,2023,34(3):388-397.(SHI P F,ZHAO Y J,XU H R,et al.Simulation and prediction of streamflow based on phase space reconstruction and deep learning algorithm[J].Advances in Water Science,2023,34(3):388-397.(in Chinese))
[16]YU D W,JI S P,LIU J,et al.Automatic 3D building reconstruction from multi-view aerial images with deep learning[J].ISPRS Journal of Photogrammetry and Remote Sensing,2021,171:155-170.
[17]LI S J,HU G H,CHENG X H,et al.Integrating topographic knowledge into deep learning for the void-filling of digital elevation models[J].Remote Sensing of Environment,2022,269:112818.
[18]MUHADI N A,ABDULLAH A F,BEJO S K,et al.The use of LiDAR-derived DEM in flood applications:a review[J].Remote Sensing,2020,12(14):2308.
[19]戴玮琦,李欢,龚政,等.无人机技术在潮滩地貌演变研究中的应用[J].水科学进展,2019,30(3):359-372.(DAI W Q,LI H,GONG Z,et al.Application of unmanned aerial vehicle technology in geomorphological evolution of tidal flat[J].Advances in Water Science,2019,30(3):359-372.(in Chinese))
[20]刘宝华,王智,宋云记.三维激光点云和无人机倾斜模型的融合应用[J].测绘通报,2021(6):159-162,165.(LIU B H,WANG Z,SONG Y J.Fusion application based on 3D laser scanning data and tilting photogrammetry data of UAV[J].Bulletin of Surveying and Mapping,2021(6):159-162,165.(in Chinese))
[21]RIZALDY A,PERSELLO C,GEVAERT C,et al.Ground and multi-class classification of airborne laser scanner point clouds using fully convolutional networks[J].Remote Sensing,2018,10(11):1723.
[22]HE H X,KHOSHELHAM K,FRASER C.A multiclass TrAdaBoost transfer learning algorithm for the classification of mobile lidar data[J].ISPRS Journal of Photogrammetry and Remote Sensing,2020,166:118-127.
[23]KASHEFI A,MUKERJI T.Physics-informed PointNet:a deep learning solver for steady-state incompressible flows and thermal fields on multiple sets of irregular geometries[J].Journal of Computational Physics,2022,468:111510.
[24]HU H,YU J C,YIN L,et al.An improved PointNet++ point cloud segmentation model applied to automatic measurement method of pig body size[J].Computers and Electronics in Agriculture,2023,205:107560.
[25]ZHANG L,WANG H.A novel segmentation method for cervical vertebrae based on PointNet++ and converge segmentation[J].Computer Methods and Programs in Biomedicine,2021,200:105798.
[26]SUN C J,ZHANG F,ZHAO P J,et al.Automated simulation framework for urban wind environments based on aerial point clouds and deep learning[J].Remote Sensing,2021,13(12):2383.
[27]LUO P P,LUO M T,LI F Y,et al.Urban flood numerical simulation:research,methods and future perspectives[J].Environmental Modelling & Software,2022,156:105478.
[28]薛樹强,杨文龙,李保金.反距离加权插值函数性质及最优插值条件[J].测绘科学,2022,47(10):1-7,65.(XUE S Q,YANG W L,LI B J.Applicable conditions to spatial interpolation of inverse distance weighting average[J].Science of Surveying and Mapping,2022,47(10):1-7,65.(in Chinese))
[29]CHEN Y,XIONG Y J,ZHANG B H,et al.3D point cloud semantic segmentation toward large-scale unstructured agricultural scene classification[J].Computers and Electronics in Agriculture,2021,190:106445.
Point clouds segmentation and flood risk simulation method based on deep learning
Abstract:The efficacy of conventional flood risk assessment methods is curtailed by extensive computational requirements,insufficient data,and difficulty in adapting to terrain changes,thereby it is urgent to quickly model and analyze flood in large scenarios.This research delineates an innovative technique that amalgamates expansive LiDAR point clouds segmentation with deep learning to expedite flood risk simulation.Our comprehensive procedural framework is comprised of data acquisition and preprocessing,sophisticated point cloud segmentation,Digital Elevation Model (DEM) reconstruction,and hydrodynamic simulation.It has been applied specifically to model flood scenarios within a designated section of China′s South-to-North Water Diversion Project.The empirical results underscore the proficiency of this method,with an mean Intersection over Union reaching 70.8% and an overall classification accuracy attaining 88.7% for the extraction of intrinsic terrain features.The method accurately projects maximum flood inundation extents of 7.0×104 m2 and 10.5×104 m2 for the respective design and check flood simulation scenarios.This approach provides a paradigm shift in rapid flood risk assessment,markedly advancing the modeling efficiency and analysis precision in flood risk management.
Key words:flood risk;point clouds segmentation;deep learning;DEM reconstruction;hydrodynamics simulation
猜你喜欢
中国教育技术装备(2016年19期)2016-12-27
中国远程教育(2016年11期)2016-12-27
现代商贸工业(2016年25期)2016-12-26
江苏教育·中学教学版(2016年11期)2016-12-21
江苏教育·中学教学版(2016年11期)2016-12-21
现代情报(2016年10期)2016-12-15
考试周刊(2016年94期)2016-12-12
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
软件导刊(2016年9期)2016-11-07