浅谈一种基于Sigmoid 轨迹规划的相邻交叉耦合同步调平控制策略
2024-04-08 07:07孙家庆常振鑫李召芹李丰硕韩宁
中国设备工程 2024年6期
孙家庆,常振鑫,李召芹,李丰硕,韩宁
(南京晨光集团有限责任公司,江苏 南京 210000)
随着武器装备的发展,车载雷达、天线、激光武器和火炮及导弹等许多军事设备都配有自动化调平系统,为了适应多变的战场环境,提高军事设备的机动性能和战场生存能力,需尽可能地减少调平时间,因此实现快速调平是调平系统的重要目标之一。本文提出了一种基于Sigmoid 轨迹规划的耦合同步调平控制策略,根据笛卡尔坐标转换法建立调平机构运动学模型,得到平台姿态与调平支腿的位移关系。基于Sigmoid 函数对调平过程中各支腿的位移变化进行轨迹规划,得到支腿运动位移、速度与时间的序列关系。为了提高平台对负载扰动的抗干扰性,提高调平精度,引入相邻交叉耦合同步控制策略,使多个支腿按照一定关系实现平滑稳定的同步运动。经建模仿真验证,该方法可实现高精度快速调平,且调平过程稳定、平滑无冲击,抗干扰性好。
1 调平策略总体结构
常见的多点调平系统由工作平台、支腿、驱动系统、倾角传感器、控制器组成,驱动支腿的动力源包括电动驱动和液压驱动。调平系统的工作原理就是(一般为)调平控制器接收倾角传感器的反馈角度,经平算法计算后,通过驱动系统控制各支腿的伸出和缩回,最终使工作平台上的纵倾角和横倾角达到一定的水平精度内。本文提出一种基于Sigmoid[3-4]轨迹规划的耦合同步调平控制策略,基于逐高位置误差调平法原理,通过D-H坐标法建立调平工作平台物体坐标系和随动坐标系,解算出调平时支腿所需的调整增量。为保证支腿运动过程平滑、稳定无冲击,各支腿的位移调整通过Sigmoid 函数进行轨迹规划,得到支腿位移与时间的平滑序列关系。为了提高调平效率、节约调平时间、保障调平精度提高抗干扰能力,采用相邻偏差耦合同步控制策略,建立了多点调平支腿的耦合关系,通过同步控制器控制各支腿按同步比例系数实现位姿调整,
2 位姿解算模型
多点调平系统的支腿数量包括4 点、6 点,10 点等,支腿均匀分布,用以支撑平台调整。根据工作平台结构尺寸与调平支腿的分布位置关系,利用D-H 坐标法可解算出将工作台调平,各个支腿所需的位置调整量。以四点支撑调平台为例进行说明,工作台与支撑腿的位置分布关系如图1 所示,4 个支腿均匀分布于平台四周,分别为支腿1、支腿2、支腿3、支腿4。倾角传感器常位于平台中心,用于检测平台在x 和y 方向的倾角。四点调平的平台为长方形结构,现以支撑腿和平台的连接点作为为长方形顶点,假设长方形的长为b,宽为a,四条支撑轴运动缸的长度分别为l1、l2、l3、l4。

图1 四点调平工作台与支腿位置关系
假设取支腿4 与工作平台的支撑点为空间坐标系原点O,分别建立坐标系{0}和坐标系{1}。坐标系{0}为惯性坐标系O-xyz,坐标系{1}为物体坐标系O-x´y´z´。惯性坐标系O-xyz 是调平的基准平面,其x轴和y 轴与世界坐标系平行。物体坐标系O-x´y´z´与工作平台关联,随之旋转。物体坐标系的x 轴与长方形的宽边平行,y 轴与长方形的长边平行,四个支撑点的坐标分别为P1、P2、P3、P4,如图2 所示。顶点P1 在坐标系{0}中的表达形式为0P1,在坐标系{1}中的表达形式为1P1。4 个顶点在坐标系{1}中的坐标依次为1P1=(a 0 0)T、1P2=(a b 0)T、1P3=(0 b 0)T、1P4=(0 0 0)T。

图2 坐标系转换模型
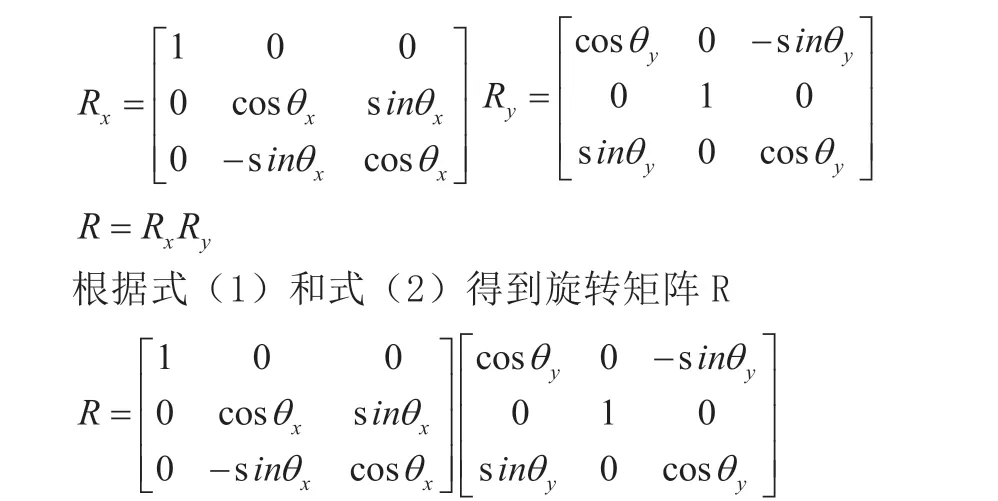
根据D-H 坐标法物体坐标系经过旋转可至惯性坐标系,工作平台以原点O 为中心绕x 轴旋转θx,绕y 轴旋转θy 即可到达基准平面至调平状态,旋转矩阵可以根据矩阵推导得到。Rx为绕x 轴的旋转矩阵,Ry为绕y轴的旋转矩阵。
假设1Pi=(1Xi 1Yi 1Zi)T,0Pi=(0Xi 0Yi 0Zi)T,其中(i=1,2,3,4)根据D-H 坐标法,四个顶点在惯性系下的坐标可以表示为:

采用最高点追逐原则,固定最高点不动,其余三轴的姿态调整为伸长方式。各支腿通过偏移值z0 补偿,可以得到一个支腿伸长量为0,该支腿为最高支撑点,经偏移量z0 补偿后各支撑轴的伸长量如下:
3 模型与仿真
基于SimMechanics 动力学建模建立四点调平系统物理模型,对调平控制策略进行仿真验证。仿真中设定调平系统结构参数如下:调平工作台a=2m、b=3m、平台初始高度1m、初始倾角θx=2°、θy=1°。
3.1 轨迹规划仿真模型
根据第3 节位置轨迹规划算法及模型参数,对调平系统各支腿的期望速度、位移轨迹进行规划,设定规划的调平总时间ts=15s,经模型仿真可以得到各支腿的期望速度及期望位移变化曲线如图3 所示。从图中可以看出,基于Sigmoid 函数所规划的路径下,各支腿速度、位移变化均为平滑的曲线,无运动冲击。

图3 基于Sigmoid 函数所规划的支腿期望速度、位移曲线
3.2 同步控制仿真
以四点调平系统为例,验证在外部干扰的情况下,交叉耦合同步控制策略多轴位置同步控制的效果。给定四条支腿同一个位置指令,在7.5s 时,给支腿1 施加一个负载扰动,其中扰动大小为1 倍的额定转矩,其他三个支腿负载状态不变,对比同步控制策略在负载扰动情况下的位置同步效果,支腿位移曲线-未添加同步控制策略的仿真结果如图4 所示,支腿位移曲线-添加同步控制策略的仿真结果如图5 所示。
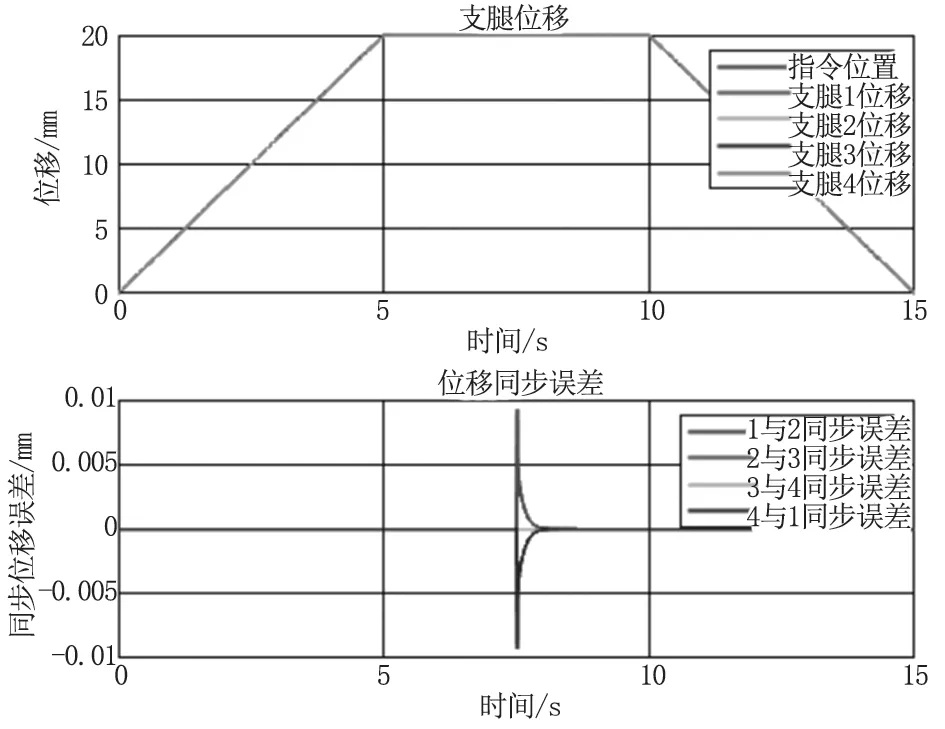
图4 支腿位移曲线-未添加同步控制策略

图5 支腿位移曲线-添加同步控制策略
由仿真结果可以看出,添加同步控制策略后,支腿位移的最大同步误差由0.009mm 减小到0.004mm,减小约55.6%。同步调整时间由0.9s 减小到0.5s,减小约44.4%,验证了同步策略的在减小最大同步误差和缩短同步调整时间两方面均有提升。
3.3 调平系统整体仿真
基于上述仿真模型搭建与验证,对最终调平系统的整体调平性能进行仿真,各支腿位移误差,调平平台角度变化情况。经ts 时间调平后,θx 与θy 均在3’以内,满足调平精度要求。
4 结语
采用D-H 坐标法建立平台位姿解算模型,可以求解出各调平支腿所需的调整位移,利用Sigmoid 函数对位移调整过程进行轨迹规划,可以实现柔性调平。根据相邻交叉耦合同步控制策略,建立各支腿耦合关系的同步控制器可以实现各支腿的同步调整,在simulink环境下利用SimMechanics 搭建动力学模型,对调平控制策略的效果进行了验证,仿真结果证明,一种基于Sigmoid 轨迹规划的相邻交叉耦合同步调平控制策略调整过程平滑、调平时间短、精度高,抗干扰性好。
猜你喜欢
中国公路(2021年17期)2021-11-22
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
中国民间疗法(2021年5期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
中国科技纵横(2020年5期)2020-06-29
森林工程(2018年4期)2018-08-04
航天工业管理(2017年4期)2017-05-12
工业设计(2016年6期)2016-04-17