
基于Multibody的穿刺手术机器人设计与仿真
2024-04-18 03:49邹宇鹏张际平郑杰仁张宗源顾学斌李万哲
实验室研究与探索 2024年1期
邹宇鹏, 张际平, 郑杰仁, 张宗源, 顾学斌, 李万哲
(中国石油大学(华东)机电工程学院,山东青岛 266580)
0 引 言
恶性肿瘤是对人类生命具有严重危害性的重大疾病,来自国家癌症中心最新的数据显示,恶性肿瘤已成为我国居民第二大死亡原因[1-2]。患者及早进行穿刺诊断可有效降低癌症死亡率。在医疗实践中,核磁共振成像(Magnetic Resonance Imaging,MRI)技术引导的微创穿刺手术是诊断和治疗肿瘤的重要手段,与常规手术相比,微创穿刺手术具有手术创伤小、患者恢复快和相关并发症少等优点,但仍面临着多次扫描时间长,穿刺精度低等问题[3]。
针对微创穿刺手术核磁兼容性和穿刺定位精度要求,本文设计了一款2R3T 并联柔索驱动核磁兼容穿刺定位手术机器人,采用柔索牵引代替刚性驱动,具有灵活、高精度和重量轻等特点[4]。每根柔索都由电动机驱动,以实现穿刺针的运动和姿态调整。并联结构能使机器人的运动更加平滑,同时减少机器人的惯性负载,提高机器人的响应速度和稳定性[5-7]。
对穿刺手术机器人进行总体结构设计,并对其进行正、逆运动学分析,同时基于Multibody 建立机器人运动学模型,对运动学模型进行仿真分析,将仿真结果与理论结果进行比较,对比验证Multibody建模的可行性和分析设计的合理性。Multibody 模块是Matlab/Simulink一个可视化多体动力学建模工具箱[8]。使用Multibody模块可方便构建机械系统的运动学和动力学模型,进行运动仿真和控制分析[9-10]。基于Multibody系统建模分析方法使复杂的运动学和动力学数据可视化,可验证设计的可行性与准确性,对于机器人运动学和动力学仿真分析实验教学具有重要意义[11-12]。
1 穿刺手术机器人结构设计
2R3T并联柔索驱动核磁兼容穿刺定位手术机器人总体结构如图1 所示,包括柔索、驱动模块、传动模块、导向模块、机架和定位模块。柔索从驱动模块输出,经传动模块、导向模块输入穿刺定位模块,通过改变柔索长度牵引末端穿刺针进行穿刺运动。

图1 穿刺机器人整体结构示意图
整体尺寸约0.64 m×0.64 m×0.45 m,符合磁共振空间要求,采用驱动模块外置,解决了铁磁性驱动材料对核磁空间的干扰问题,符合磁共振材料兼容要求,穿刺机架在核磁床上可移动,能根据病患位置调节手术机器人的位置,尽可能地增大穿刺针工作空间,通过调整磁床末端的驱动模块输出长度变化的6 根柔索,实现穿刺针的5 自由度运动,以此来实现穿刺手术运动。
2 六柔索机构工作空间对比
穿刺手术机器人作为一个6 柔索5 自由度的完全约束机构,该机构的柔索布局大体可分为A 型6 柔索机构、B型6 柔索机构、C 型6 柔索机构3 种类型。A型6 柔索机构的6 个出绳点对称分布在机构的上、下两端;B型机构的6 个出绳点分布在机构中间水平面上,高低出绳点两两重合;C型机构的6 个出绳点以正6 边形位置均匀分布在机构中间水平面上,如图2所示。
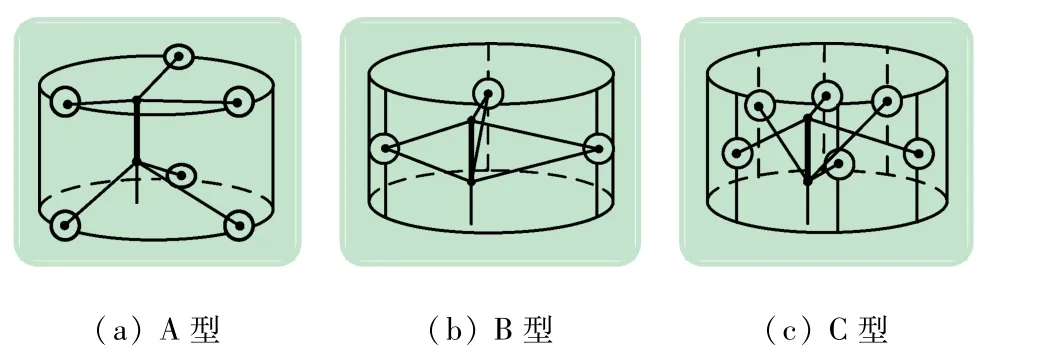
图2 3种6柔索完全约束机构
根据穿刺手术要求,设计3 种6 柔索并联机构空间框架为圆柱形框架,得到A、B和C型6 柔索机构姿态角为0°时的工作空间,如图3 所示,具体的选型对比见表1。
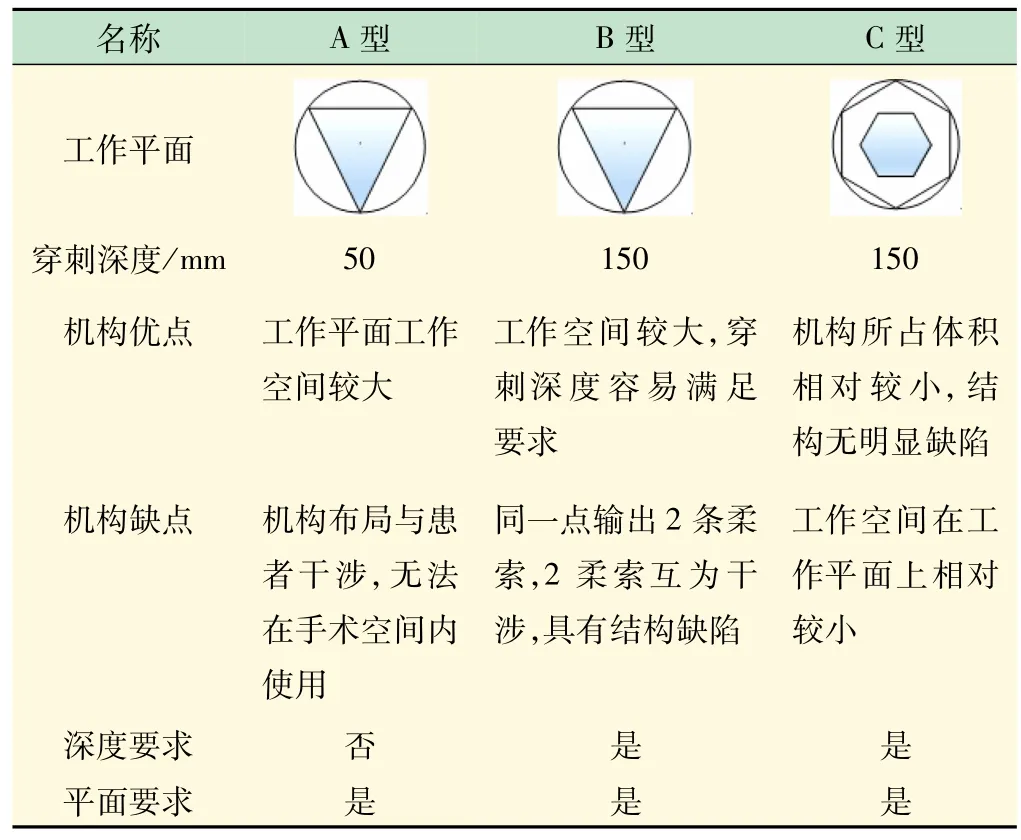
表1 3 种柔索机构工作空间对比
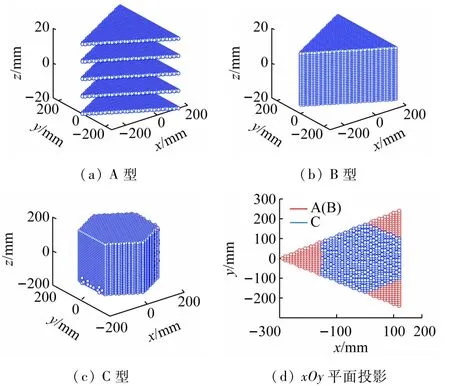
图3 3种6柔索机构工作空间示意图
3 穿刺手术机器人运动学分析
6 柔索并联穿刺手术机器人简化模型如图4 所示。图中:M1~M6为柔索驱动点;P1~P6为穿刺针动平台牵引点。初始状态下穿刺针中心位置为全局坐标系基础原点,局部坐标系坐标原点在穿刺针的中心位置上,在初始状态下,局部坐标系P-XYZ和全局坐标系O-xyz重合,动平台的位姿为P(xp,yp,zp,θx,θy,θz),其中(xp,yp,zp)为P点在全局坐标系中的坐标,θx、θy、θz分别为穿刺针绕全局坐标系x轴、y轴、z轴的旋转角,以右手螺旋为正。
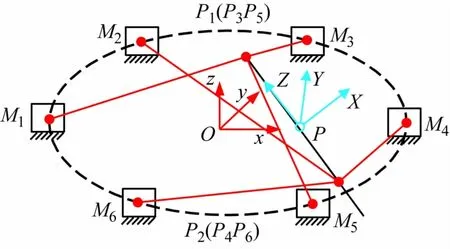
图4 6柔索并联机器人模型
穿刺针牵引点Pi至驱动点Mi的向量即为柔索长度向量,其中向量的模为柔索的长度即。则
其中每条柔索长度
式中:(xMi,yMi,zMi)、(xPi,yPi,zPi)分别为驱动点Mi和牵引点Pi在全局坐标系O-xyz中的坐标;ui为第i根柔索方向的单位矢量;ri为穿刺针中心到绳索连接点的矢量。
3.1 穿刺手术机器人逆向运动学分析
已知动平台的位姿P(xp,yp,zp,θx,θy,θz),则穿刺针牵引点Pi(xPi,yPi,zPi)在全局坐标系O-xyz中的坐标满足:
式中:(XPi,YPi,ZPi)为Pi点在局部坐标系P-XYZ中的坐标;R为方向余弦向量。
把富集培养液进行梯度稀释,并涂布于无机盐培养基平板,挑取10株单菌落划线纯化,并接入无机盐液体培养基中,30℃静置培养15 d,0.2 μm滤膜过滤,取滤液进行气相色谱检测[6]。
根据前文已知6 柔索并联结构不存在绕轴线的转动,即θz为0,此时方向余弦向量为
联立式(2)、(5)可求得各柔索长度。
3.2 穿刺手术机器人正向运动学分析
利用柔索长度的变化来控制穿刺针的位置和姿态为穿刺手术机器人的正向运动学分析,由于控制穿刺针的6 条柔索长度在求解过程中不存在求根公式,为方便快速求解,此处运动学求解利用牛顿迭代法计算得到柔索长度的近似解。牛顿迭代法是利用假象解带入,层层迭代,在有限次求解后得到一个理想解,该理想解在一定的误差允许范围内即可。具体的求解方式如下:
给定穿刺针的初始位姿点P0和该位姿点下的各柔索长度L0,与运动学逆解得到的初始位姿点P0的各条柔索长度Lc,将给定长度L0与逆解得到的Lc比较,二者差值如果在误差允许范围内,则位姿点满足条件,否则更换位姿点后重新求解进行比较。
将给定柔索长度L0和求解得到的柔索长度Lc比较函数定义为
则6 柔索机构
系统结构矩阵
当前误差可计算求得:
式中:δ 为待求解的系数;e为系统允许的误差范围。满足不等式(13)的点就是穿刺针当前的位姿点,如果当前的目标点不满足条件,则取下一个数据Lc+1,直至有满足在允许范围误差的点出现。
4 穿刺手术机器人Multibody建模
穿刺手术机器人Multibody 运动学建模由基础环境配置、寄存器、轨迹输入、运动学逆解和穿刺针和6柔索驱动等模块组成[13-14],如图5 所示:
穿刺手术机器人运动学建模过程如下:
(1)配置模型的基础环境。对求解器,物理参数配置器和世界坐标系进行配置,根据仿真建模要求依次设置求解器类型和构件的物理参数。
(2)建立穿刺针和6 柔索驱动模块。构建穿刺针模块,上下连绳点间的距离为0.3 m,6 个柔索驱动模块输出的柔索依次交错连接在穿刺针的上下2 个端点。每个柔索驱动模块如图6 所示,柔索驱动模块由柔索单元、出绳轮和转动轮组成,其中转动轮模块为模型中电动机输出轴,主要由坐标转换单元(Rigid Transform)、运动实体单元(Solid)和转动副(Revolution Joint)组成,在柔索单元中,柔索的属性由Belt-Cable Spool设置,柔索经Pulley 模块A端输入B 段输出,输出的柔索经过Belt-Cable End与穿刺针模块相连。
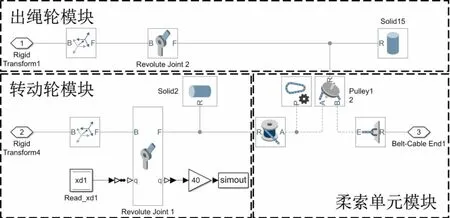
图6 柔索驱动模块Multibody建模
(3)设置寄存器模块和轨迹输入模块。建立寄存器模块,存储轨迹输入模块数据和运动学逆解得到的各柔索长度变量,建立轨迹输入模块,将穿刺针的运动轨迹设置为圆轨迹。
(4)将输入轨迹模块的穿刺针位移量输入运动学逆解模块。求解得到各柔索长度变量,将各柔索长度变量转换成电动机输出轴角位移变量输入转动轮模块Revolute Joint,使转动轮带动柔索运动控制穿刺针运动[15-16]。
5 运动学仿真结果分析
对运动学仿真模型进行编译,得到可视化界面如图7 所示。获取驱动轮在运动过程中的参数,将参数进行运动学求解得到柔索的长度变量。
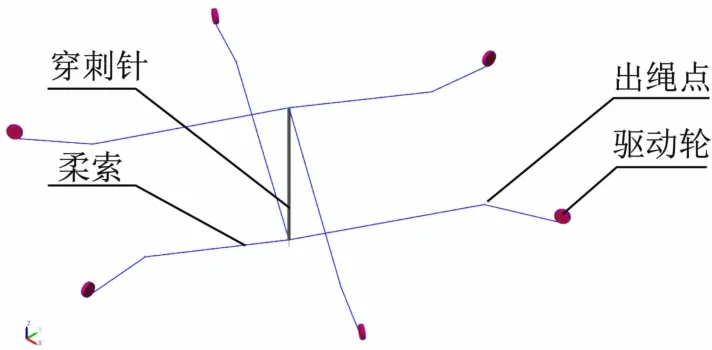
图7 可视化界面
对穿刺手术机器人运动学模型进行仿真,每隔2 s对仿真模型在xOy平面运动并记录仿真模型运动轨迹如图8 所示。经驱动轮采集到的仿真柔索长度变量Lsi(i=1,2,…,6)如图9 所示。运动学逆解得到的理论柔索长度变量L0i(i=1,2,…,6),如图10 所示。
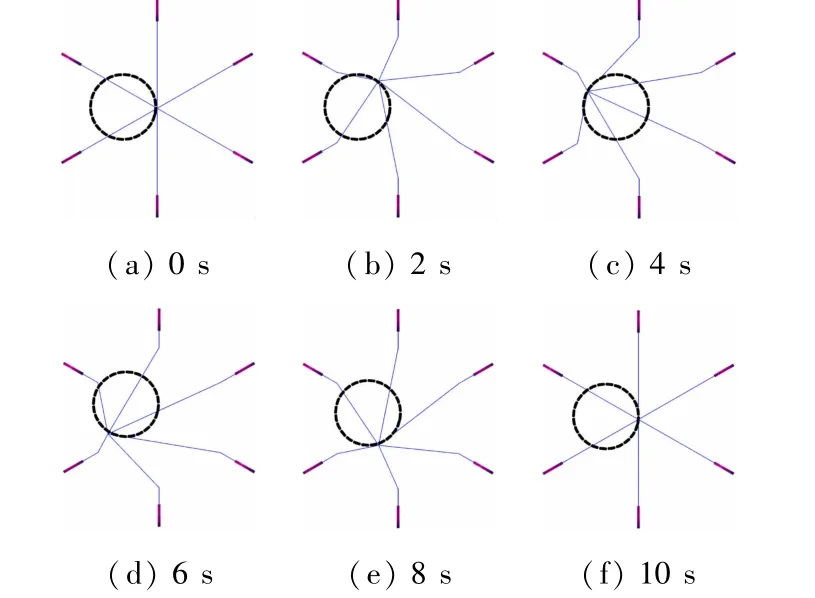
图8 仿真模型运动轨迹
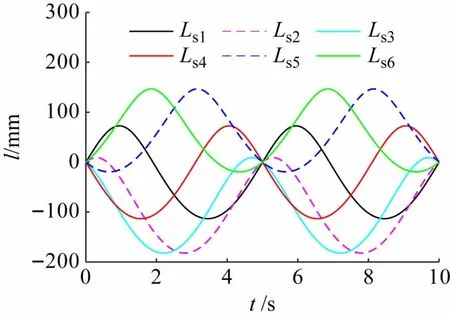
图9 驱动轮采集的仿真柔索长度变量

图10 运动学逆解得到的理论柔索长度变量
将Lsi与L0i之间的差值定义为柔索长度误差Lei(i=1,2,…,6),如图11 所示。
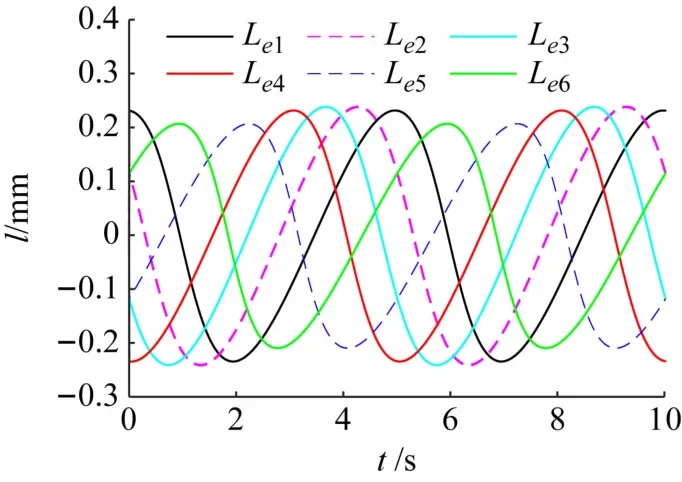
图11 柔索长度误差
仿真模型得到的柔索长度变量与运动学理论计算得到的柔索长度变量之间差距小于0.3 mm,误差较小,分析误差产生的原因可能是出绳轮在仿真中仍需要用实体代替,虽然实体半径较小,但不可简单将其按出绳点分析,出绳位置的不准确性会对运动学建模产生一定影响;穿刺针在运动过程中,缠绕在出绳轮上柔索的切点位置也会发生变化。
将Lsi利用运动学正解求解得出穿刺针的运动轨迹,如图12 所示。
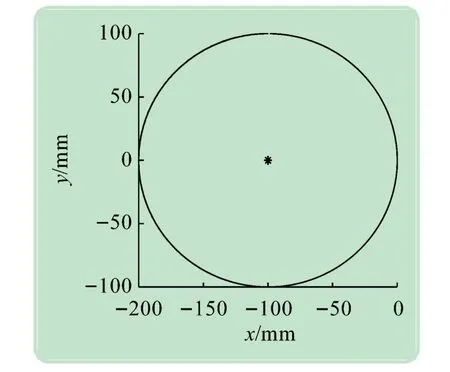
图12 穿刺针运动轨迹
穿刺针在xOy平面上的投影,以(-100,0)为圆心、100 mm为半径的圆形轨迹,这表明Multibody运动学建模的准确性,同时证明了前文运动学分析的正确性和设计的合理性。
6 结 语
本文以2R3T并联柔索驱动核磁兼容穿刺定位手术机器人为研究对象,对机器人进行结构设计和运动学分析,通过Multibody 构建了机器人运动学模型,基于轨迹规划完成仿真分析。仿真结果表明,该穿刺机器人运动学模型准确,设计合理,能缩短手术时间,提高手术安全。同时,基于Multibody的仿真过程对于机器人学,机器人技术等相关课程实验教学具有重要意义。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
中华神经创伤外科电子杂志(2020年3期)2020-07-07
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
海军航空大学学报(2015年1期)2015-11-11
机械制造与自动化(2014年1期)2014-03-01
护士进修杂志(2013年16期)2013-04-08
