
基于模糊控制的永磁同步电机协同控制
2024-04-26 10:02黄鑫谢董玉
化工自动化及仪表 2024年2期
黄鑫 谢董玉
基金项目:国家自然科学基金(批准号:61143007)资助的课题;中国-北马其顿政府间科技合作项目(国科外〔2019〕22号6-8)资助的课题;辽宁省教育厅重点研发项目(批准号:LJKZZ20220057)资助的课题。
作者简介:黄鑫(1997-),硕士研究生,从事多电机协同控制的研究,17623476300@163.com。
引用本文:黄鑫,谢董玉.基于模糊控制的永磁同步电机协同控制[J].化工自动化及仪表,2024,51(2):168-172.
DOI:10.20030/j.cnki.1000-3932.202402004
摘 要 多电机协同控制系统中存在变量多、耦合程度高等问题,使得系统的同步误差较大、启动时间久。基于传统自抗扰控制方案,提出用滑模变结构控制策略优化自抗扰控制,提高了单电机的跟踪精度;设计模糊自调整控制方案优化同步误差。在MATLAB/SIMULINK下搭建两台电机交叉耦合控制模型,并与传统固定增益的相邻交叉耦合方案进行对比,结果显示:该方案可以有效提高控制精度,在面对扰动影响时能够快速恢复稳定,且恢复稳定所用时间显著缩短。
关键词 滑模变结构控制 自抗扰控制 永磁同步电机 相邻交叉耦合 协同控制 模糊控制
中图分类号 TP27;TM32 文献标志码 A 文章编号 1000-3932(2024)02-0168-05
永磁同步电机具有结构简单、易于控制、效率高等诸多优势,在机器人、新能源汽车领域应用广泛[1~3]。但在工业应用中,单个电机的功率很难满足需求,需要多电机协同使用。因此,提高多电机控制精度、缩短响应时间具有重要的研究意义。为了提高永磁同步电机的跟踪性能,诸多控制方案被相继提出,常用的PID、滑模控制方案结构简单,在面对系统内部参数变化时,所受影响较小,在性能提升上效果显著,但这类方案比较依赖被控对象模型的精度[4],文献[5,6]提出的自抗扰方案保留了传统PID的优点,同时还不依赖于模型精度,但整个模型需要调整的参数较多,初学者调节起来并不容易;将自抗扰方案和滑模控制结合,能够有效提升单电机的控制精度,同时降低系统参数调节的难度。多电机协同控制方案中,主从控制虽然很好地衔接了多个电机,但从电机受扰动后并不能反馈给主电机,同时会将扰动产生的误差传递给下一个从电机,从而导致后序从电机逐渐偏离目標值,只适合精度要求不高的场合[7],并行控制下,各电机耦合程度不高,不适用于高精度场合[8];相邻交叉耦合控制能够很好地协同多个电机,一定程度上提升协同性,但是传统固定增益的相邻交叉耦合方案会造成同步误差大、启动时间长等缺点[9,10]。
笔者采用滑模优化自抗扰算法来提升电机的跟踪性能,同时在同步性能优化方面,选用模糊控制替代传统的固定比例增益来提升性能。
1 永磁同步电机
永磁同步电机内部气隙磁场耦合程度高,电磁关系复杂。在做出理想化假设,忽略磁滞等因素后,永磁同步电机在d-q轴下的电压方程可以表示为[11~13]:
u=Ri+-φu=Ri++φ(1)
其中,u、u为d-q轴下的定子电压;R为绕组电阻;i、i为d-q轴下的定子电流;φ、φ为两相电流下的定子磁链;为实际转子电角速度;t表示时间。
磁链方程可以表示为:
φ=Li+φφ=Li(2)
其中,L、L为d-q轴下的定子电感;φ为永磁体磁链。
电磁转矩T的方程为:
T=p[φi-(L-L)ii](3)
其中,p是极对数。
机械运动方程为:
J=T-T-Bω=(4)
其中,J为转动惯量;T为负载转矩;ω为转子机械角速度;为电角速度;B为电机粘滞摩擦
系数。
2 跟踪控制器设计
2.1 自抗扰控制器设计
传统自抗扰控制器由微分跟踪器、观测器和误差补差3个模块组成[14,15]。由于永磁同步电机转速控制器通常是一阶的,可以进行简化处理,本次设计省去了微分跟踪器环节。
对式(4)做如下变换:
=T-T-(5)
其中,为的微分。
本设计采用的是表贴式永磁同步电机,因此L=L。再将式(3)代入式(5)中,有:
=1.5i--(6)
=bi+c+d(t)(7)
b=1.5pφ /J
c=-B/J
d(t)=-pT/J
将d(t)视为内部扰动,视为外部扰动,为进一步简化,令a(t)=d(t)+c,则有:
=a(t)+bi(8)
因此,可将二阶观测器设计为:
e=z-=z-β fal(e,α,δ)+bu=-β fal(e,α,δ)(9)
其中,z对应的观测值;z对应a(t)的观测值;β、β是待调参数;e代表误差;fal()是非线性函数;、分别是z、z的微分;α为微分系数;δ为滤波系数;u为系统输出。
对于非线性误差补偿环节,设计如下:
e=-zi=-kfal(e,α,δ)-z(10)
其中,是给定转速;k是控制器增益;e为误差值;i为控制器输出。
式(9)中的非线性函数fal(),一般定义为:
fal(e,α,δ)=|e|sgn(e),|e|>δe/δ ,|e|≤δ,0<α<1 (11)
2.2 滑模优化自抗扰
对于永磁同步电机转速环滑模控制设计,选取的滑模面s为:
s=ax+x(12)
x=-x==-(13)
其中,a为代调参数;为x的微分。
对式(13)求导,有:
=-=-=-b(14)
将式(8)、(12)、(13)、(14)结合,可得趋近律为:
=-aa(t)-abi-b(15)
其中,为滑模面s的微分;为i的微分。
选用传统指数趋近律:
=-ksgn(s)-εs(16)
其中,ε为待调参数。
结合式(15)、(16),再将a(t)的观测值z代入,有:
i=[ksgn(s)+εs-az-abi]dt(17)
3 同步控制器设计
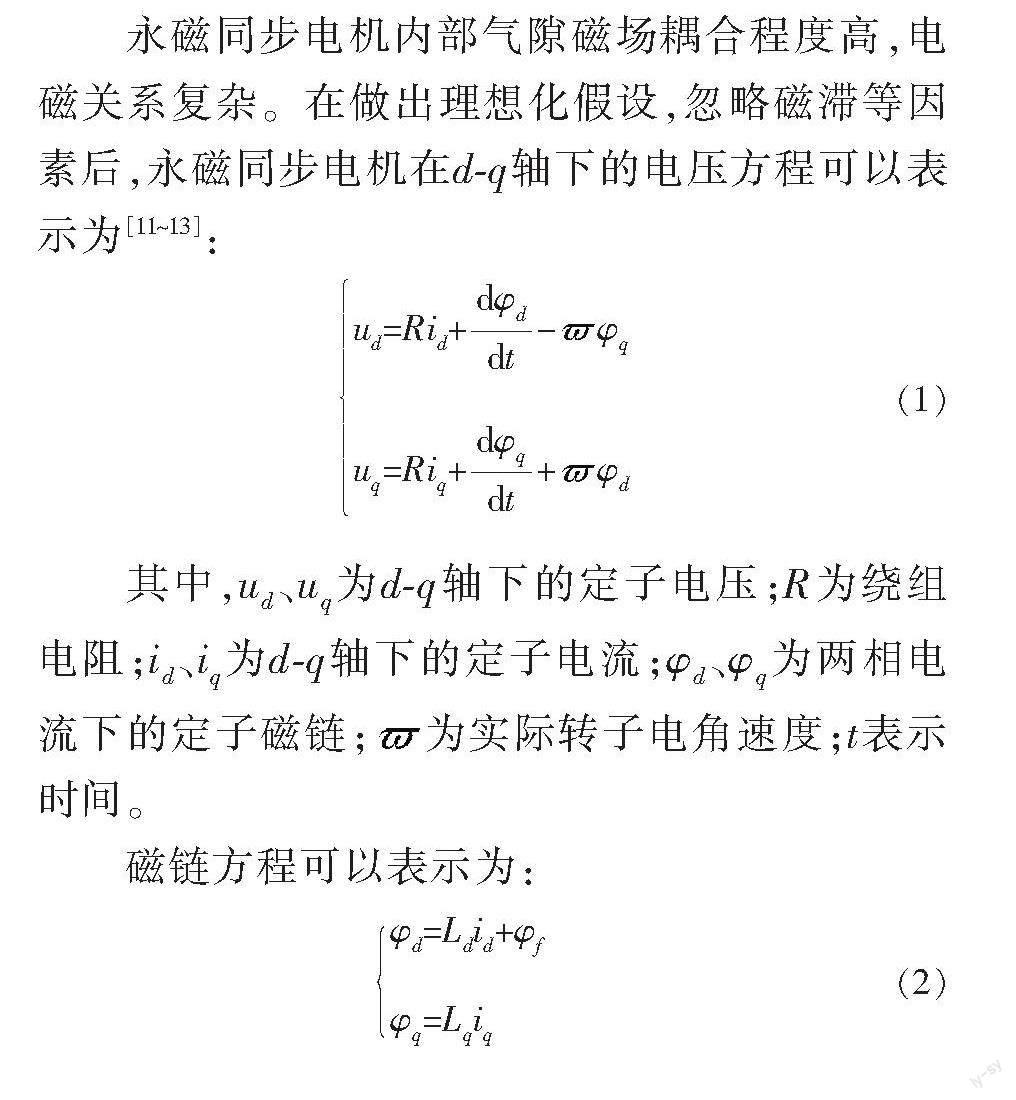
传统固定参数的交叉耦合控制结构如图1所示,其中,M、M代表两台电机,ω表示给定转速,ω、ω表示电机实际转速,K是待调参数。
图1 传统固定比例的交叉耦合控制结构框图
当电机负载发生较大的波动时,传统固定增益同步补偿器将导致速度波动过大,再次达到稳态需要的时间更长,不适用于要求快速响应的系统。
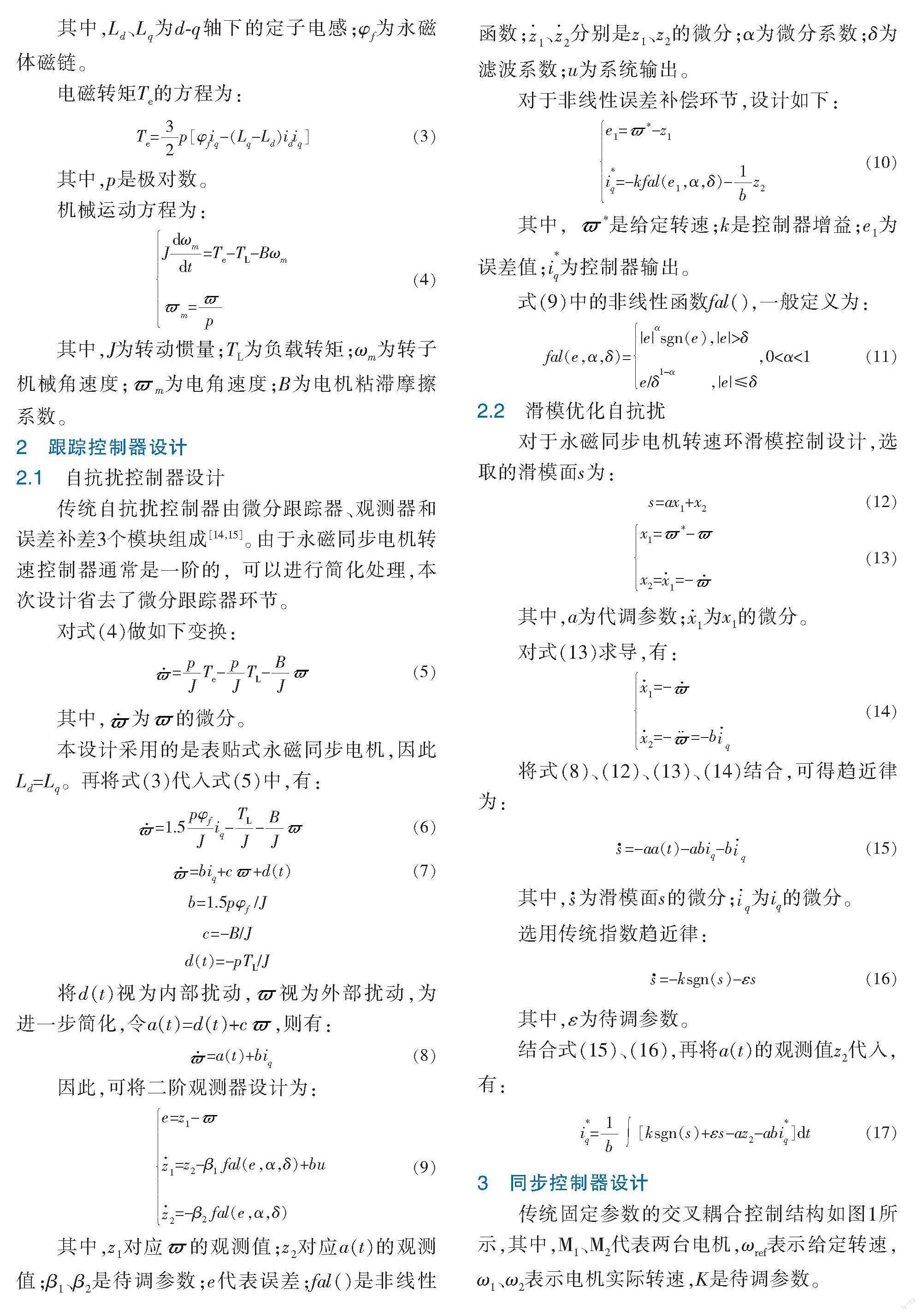
这里选用模糊控制作为误差补偿,以增强电机的同步性能。控制方案E=-,EC=以两台电机的转速误差和转速误差的微分作为控制器的输入,将控制器的输出分别反馈于两台电机,可以很好地实现电机速度误差的实时跟踪调节。这里,转速误差E和误差变化率EC的基本论域为[-6,6],采用传统三角隶属度函数,将图1中的待调参数K用模糊控制器取代,得到了新的控制结构,如图2所示。
图2 基于模糊控制器的交叉耦合控制结构框图
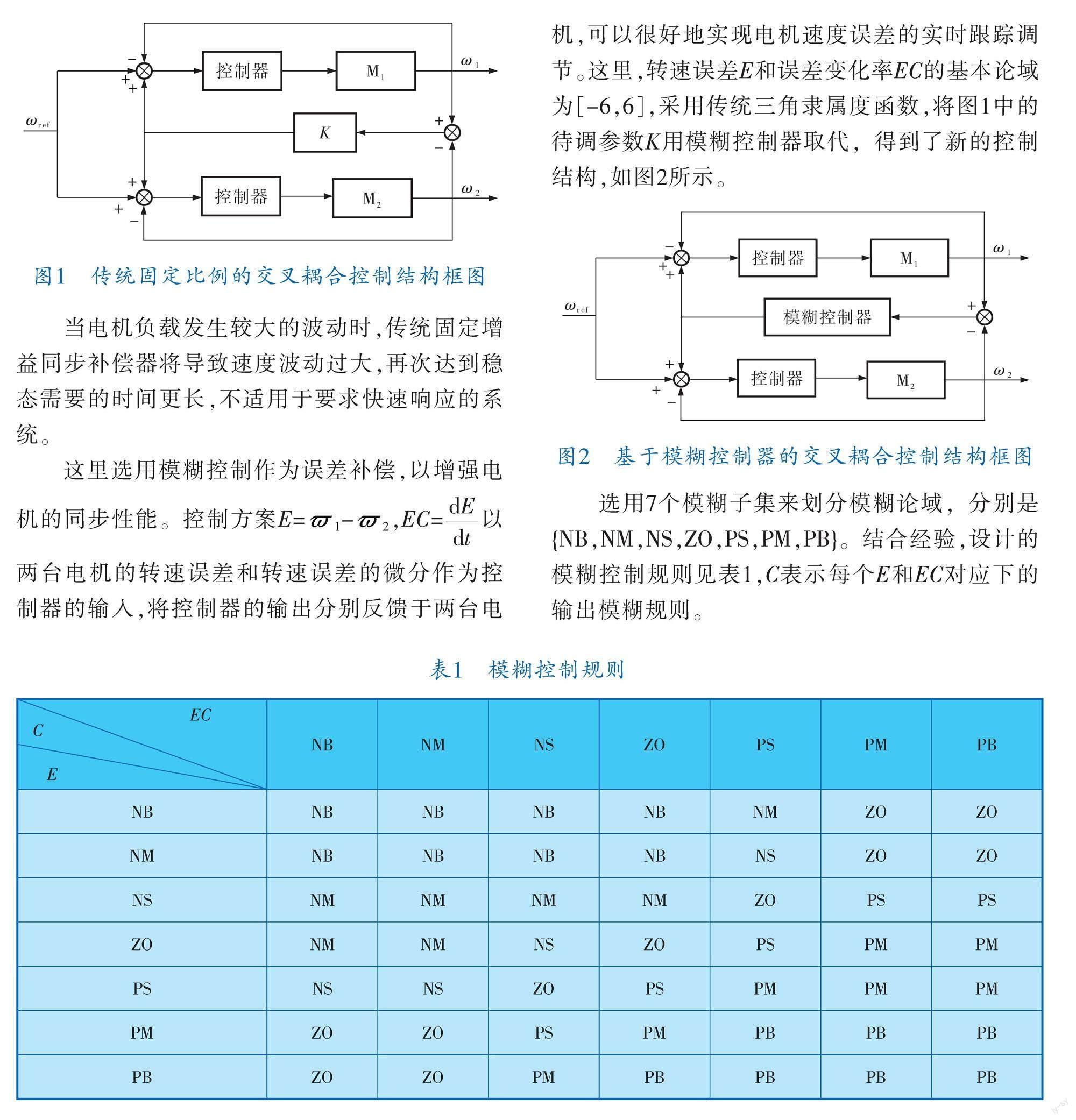
选用7个模糊子集来划分模糊论域,分别是{NB,NM,NS,ZO,PS,PM,PB}。结合经验,设计的模糊控制规则见表1,C表示每个E和EC对应下的输出模糊规则。
4 MATLAB/SIMULINK仿真
为了验证笔者设计的跟踪控制器及同步控制器的效果,在MATLAB/SIMULINK环境下搭建永磁同步电机矢量控制模型。对电机电流内环不做太多比较,采用传统的PI控制器进行调整,转速环采用SMC-ADRC控制器。同时同步控制器,用笔者设计的模糊控制器取代传统的固定参数交叉耦合控制器,并与传统固定比例增益模型、并行控制和主从控制进行比较。为了方便比较,采用了两台参数相同的电机,电机参数如下:
电阻R 2.875 ?赘
电感L 8.5×10-3 H
轉动惯量J 1×10-3 kg·m2
极对数p 4
永磁磁链φ 0.32 Wb
对于目标给定转速ω,设定在t=0.01 s时,给定转速由0升至1 000 r/min;在t=0.02 s时,给定转速由1 000 r/min降至700 r/min,整个仿真时间设定为0.03 s。对比图3、4发现,两台电机的仿真数据重合,说明在两种不同控制策略下的空载启动阶段,无论是转速亦或是跟踪误差,两台电机的启动状态均保持一致。这反映了在空载启动阶段,两种控制策略是相同的,改进后的模糊交叉耦合控制策略保留了原来控制策略的优势。
图3 固定比例交叉耦合转速图
图4 模糊交叉耦合转速图
在进行仿真以前,对于目标给定转速设置在t=0.01 s由0增加至1 000 r/min,整个系统仿真时间设置为0.03 s。在t=0.02 s时,电机M1不做施加负载处理,对电机M2则给定负载9 N·m并持续到最后。待电机运行稳定后,对两台电机的运行效果进行分析,两种控制策略下的电机转速分别如图5、6所示。
分析图5、6可知,在传统固定比例交叉耦合控制策略下,电机M2的转速变化会对电机M1造成波动,待到两台电机再次稳定时,所需的调整时间约0.003 7 s。而采用模糊交叉耦合控制策略时,电机M2对电机M1造成的波动很小,几乎可以忽略,再次稳定所需的时间仅0.002 1 s。
对电机同步误差分析可知,采用模糊交叉耦合策略时,不仅系统所需的调整时间显著缩短,而且负载变化导致的转速波动幅值也从60 r/min下降到40 r/min。证明在改进控制策略下,系统整
图5 固定比例交叉耦合转速图
图6 模糊交叉耦合转速图
体的抗扰动性能得到了提升,调整时间显著缩短,控制精度也有一定的提升。
5 结束语
改进后的模糊交叉耦合控制器和原交叉耦合控制器相比,不仅保留了交叉耦合控制器出色的稳态性能,而且调节时间明显缩短。与此同时,原方案在多次增益参数选取后,波动幅值依然有50 r/min,经过模糊控制优化后,原方案过大的波动幅值也明显降低(降至40 r/min),系统的抗扰动性能再次得到证明。在进行外加不同情况负载的对比后,优化后的模糊交叉耦合控制器的性能要明显优于传统的控制方案。
参 考 文 献
[1] 丁石川,何旺,杭俊,等.基于径向气隙磁密和定子电流的永磁同步电机均匀退磁故障诊断研究[J/OL].中国电机工程学报,2023:1-9.[2023-03-07].
[2] 孟凡琨,文小琴,游林儒.基于自适应周期扰动观测器的变频压缩机转速波动抑制[J].华南理工大学学报(自然科学版),2021,49(2):40-49.
[3] 姜伟,裘锦霄,郑颖,等.基于惯量估计的工业机器人关节伺服系统变增益自抗扰控制[J].仪器仪表学报,2020,41(5):118-128.
[4] 刘宁,柴天佑.PID控制器参数的优化整定方法[J].自动化学报,2023,49(11):2272-2285.
[5] 孟志鹏,杨柳庆,王波,等.基于改进平衡优化算法的折叠翼飞行器自抗扰控制器设计[J/OL].北京航空航天大学学报,2023:1-18.[2023-03-07].
[6] 颜鸿涛,许勇,贾涛,等.固定翼无人机密集编队极速穿越策略研究[J].控制与决策,2023,38(4):1074-1084.
[7] 丁石川,陈书祥,杭俊,等.单逆变器驱动双永磁同步电机断相容错控制策略[J].中国电机工程学报,2022,42(12):4581-4590.
[8] 葛育晓,赵荣珍.基于改進积分滑模控制多电机协同控制研究[J].振动与冲击,2021,40(22):138-143;208.
[9] 丁威,杜钦君,宋传明,等.均值耦合多电机滑模速度同步控制[J].西安交通大学学报,2022,56(2):159-170.
10] 张康,王丽梅.基于位置偏差解耦的直驱H型平台滑模同步控制[J].中国电机工程学报,2021,41(21):7486-7496.
[11] ZHONG C Q, WANG L, XU C F. Path Tracking of Permanent Magnet Synchronous Motor Using Fractional Order Fuzzy PID Controller[J].Symmetry,2021(7):11-18.
[12] ZHOU K,AI M,SUN Y C,et al.PMSM Vector Control Strategy Based on Active Disturbance Rejection Controller[J].Energies,2019,12(20):1-19.
[13] YAN H L,LI J P, LI L M,et al.Research of Active Disturbance Rejection Controller Design for PMSM Servo System[J].Journal of Physics:Conference Series,2021(1):012039.
[14] LIU F,LI H T,LIU L,et al.A Control Method for IPMSM Based on Active Disturbance Rejection Control and Model Predictive Control[J].Mathematics,2021,9(7):1-16.
[15] HUANG J C,MA P,BAO G X,et al.Research on Position Servo System Based on Fractional-Order Extended State Observer[J].IEEE Access,2020(8):102748-102756.
(收稿日期:2023-03-07,修回日期:2023-12-30)
Collaborative Control of Permanent Magnet Synchronous
Motor Based on Fuzzy Control
HUANG Xin1, XIE Dong-yu2
(1. Key Laboratory of Industrial Environment-Resource Collaborative Control and Optimization Technologies of Liaoning
Universities; 2. School of Safety Engineering, North China Institute of Science and Technology)
Abstract In the multi-motor collaborative control system, many variables and high degree coupling make the synchronization error of the system larger and the start-up time longer. Based on the traditional active disturbance rejection control(ADRC)scheme, optimizing ADRC by sliding mode control strategy was proposed to improve the tracking accuracy of a single motor, including designing a fuzzy self-adjusting control scheme to optimize synchronization error. In the MATLAB/SIMULINK environment, two motor cross-coupling control models were constructed and compared with the traditional fixed-gain adjacent error coupling scheme. The results show that, this scheme can effectively improve the control accuracy, significantly reduce the influence of disturbance and significantly shorten the time required to restore stability.
Key words sliding mode variable structure control, ADRC, permanent magnet synchronous motor,adjacent cross coupling, collaborative control, fuzzy control
猜你喜欢
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
西南交通大学学报(2016年3期)2016-06-15
科技视界(2016年12期)2016-05-25
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22
