
基于效率最优的前后轴式两档电动车转矩分配策略
2024-04-29 06:14徐绍聪,汪选要
邵阳学院学报(自然科学版) 2024年1期
关键词:电动汽车
徐绍聪,汪选要
摘要:针对前后轴式电动两档四驱汽车的转矩分配问题,提出了一种综合效率最优的方法。以综合效率最优为目标,建立整车能量效率数学模型,采用系统效率最优分配的方法,获得整车效率最优扭矩分配系数矩阵。在Avl-Cruise和MATLAB Simulink中建立联合仿真环境,对效率最优扭矩分配模型利用CLTC(中国轻型汽车行驶工况)进行验证。仿真结果表明,与平均分配扭矩策略相比,效率最优分配策略能有效分配前后轴电机转矩,令电机的工作区间处于合适的效率上,使电耗有效降低。
关键词:电动汽车;转矩分配;两档
中图分类号:U469.72 文献标志码:A
The efficiency-optimal torque distribution strategy for front-and-rear-axle-type two-speed-gear electric vehicles
XU Shaocong, WANG Xuanyao
(School of Mechanical Engineering, Anhui University of Science and Technology, Huainan 232001, China)
Abstract: A comprehensive efficiency optimal method for torque distribution of front-and-rear-axle-type electric two-speed-gear four-wheel drive vehicles was proposed. To optimize the comprehensive efficiency, optimal as the objective, a mathematical model of vehicle energy efficiency was established. The system efficiency optimal allocation method was used to obtain the vehicle efficiency optimal torque distribution coefficient matrix. Under the joint simulation environment of Avl-Cruise and MATLAB Simulink, the efficiency optimal torque distribution model was verified by using the CLTC cycle. The simulation results show that compared with the average torque distribution strategy, the efficiency optimal distribution strategy can effectively distribute the torque of the front and rear axle motors, ensure a suitable efficiency range of motor, and reduce the power consumption effectively.
Key words: electric vehicle; torque distribution; two gears
前后軸式电动汽车的扭矩分配是指将电动汽车的扭矩分配到前后轴上,以实现更好的动力性和操控性[1]。目前,前后轴式电动汽车的扭矩分配研究方向主要有两个:一个是稳定性分配原则,根据实时的轴荷分布来具体分配,不能超过路面附着允许的最大值,避免车辆进入失稳状态[2];另一个是效率最优分配原则,保证车辆在稳定的前提下实现最好的经济性[3]。对于双电机纯电四驱车的扭矩分配,工程上以稳定性分配原则为边界条件,效率最优分配原则为具体控制条件,保证车辆在稳定的前提下实现最好的经济性[4-8]。漆星等[9]通过多目标粒子群优化提出了对电机效率和电池效率的最优策略。朱绍鹏等[10]通过黄金比例搜索算法确定前、后轴电机最佳的转矩分配控制系数。上述转矩优化策略均未对多档电动车模型进行优化。
本文以前后轴式双电机电动四驱汽车,建立电动汽车纵向动力学数学模型,以系统效率最优为目标设计前后轴转矩分配策略,搭建仿真模型,并验证该分配策略的有效性。
1前后轴式电动四驱汽车建模
1.1整车部分参数
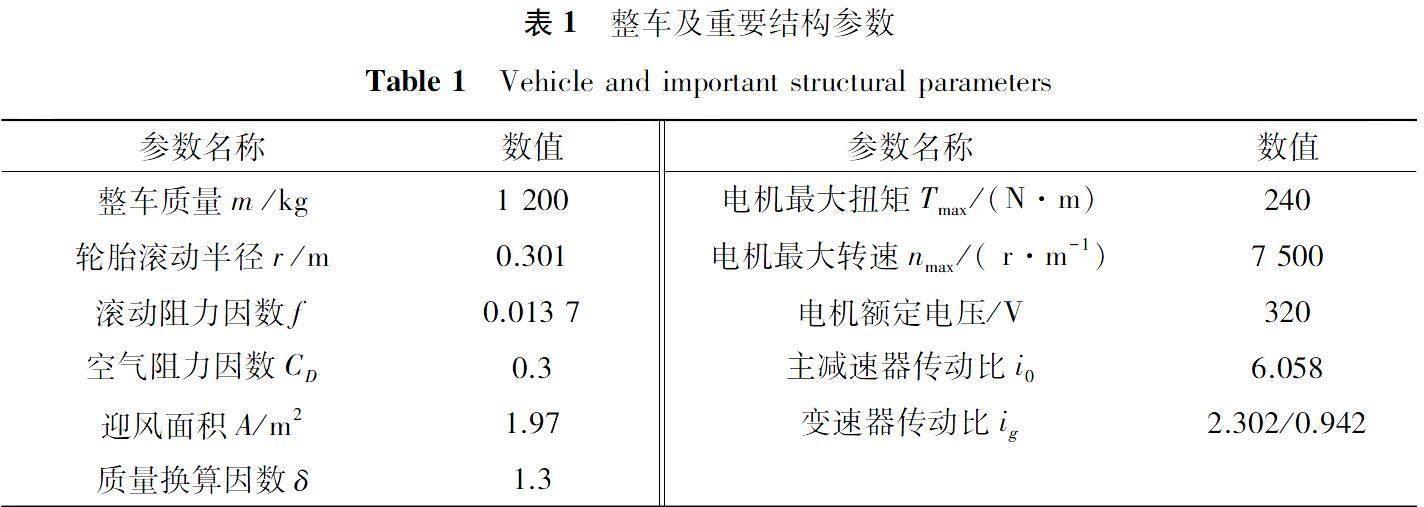
前后轴式电动汽车驱动系统主要由动力电池、电动机、主减速器、差速器和车轮组成。其动力分别由前后轴上的两个电机,经过减速器传递至车轮,前后电机的转矩由行车控制器分别实时控制,使汽车的总需求扭矩合理地分配到前后轴上。由于传统驱动结构在低速和低扭时效率较低,因此,在前轴添加变速器,扩大高效率区间[11]。整车及重要结构参数见表1。本文的研究对象为前后轴电机的扭矩分配,假设传动系统的效率为1,简化计算过程。整车动力结构见图1,电力类型为永磁同步电机。
1.2控制系统模型建立
整个控制系统由3个部分组成,分别是驾驶员模型、转矩分配模型以及车辆动力学模型。驾驶员模型由当前车速、目标车速和目标加速度得出整车需求扭矩,再经过扭矩分配模型,将整车需求扭矩分配到前后电机上,整车动力学模型由电机以及制动器扭矩算出当前车速,再输入到驾驶员模型中形成反馈控制。控制系统见图2。
1.2.1驾驶员模型
驾驶员模型由目标车速与实际车速相减得出速度的偏差值,作为修正对目标加速度进行修正,将其的比例、积分和微分通过线性组合来控制整车的需求扭矩[12],其控制扭矩表达式为
T=kpe(t)+1TI∫t0e(t)dt+TDde(t)dt(1)
式中:kp、TI和TD分别为比例系数、积分常数与微分常数。
经过仿真验证此驾驶员模型可以有效将车速控制在目标速度上。图3为基于CLTC(中国轻型汽车行驶工况)循环的仿真数据,其中1为当前速度,2为目标速度。
1.2.2转矩分配模型
由驾驶员模型得到需求扭矩,根据控制策略将其分别分配到前后轴电机与制动器上。目前,较传统的分配方式是使用固定比例分配,这种方式较容易实现且结构简单较稳定。不同的扭矩分配策略仅能够影响到前后轴间的扭矩分配,是在达到整车需求扭矩的情况下完成的,并不会对整车的动力性造成影响。
1.2.3车辆动力学模型
在前后轴式电动汽车行驶的过程中,需要满足车辆的纵向动力学公式:
Fr=Ff+Fw+Fi+Fa(2)
即:
Treqr=Wf+CDAu221.15+mgi+δmdudt(3)
式中:Fr为驱动力;Ff为滚动阻力;Fw为空气阻力;Fi为坡道阻力;Fa为加速阻力;Treq为整车需求扭矩;r为车轮半径;W为车轮载荷;f为车轮滚动阻力因数;CD为空气阻力因数;A为迎风面积;m为车身质量;g为重力加速度;i为道路坡度角;δ为汽车旋转质量换算因数。
2转矩分配模型设计
转矩分配模型是将汽车总的需求扭矩分配到各个动力源,本文主要为前后轴的两个电机。转矩分配系数是其中的关键,本文是按照电机综合效率对电机进行分配。
为了使整车经济性最优,使用基于效率最优的转矩分配策略对前后轴电机的目标扭矩进行分配,关键是前后轴扭矩分配系数的确定。
综合效率最优分配是按照最优效率所对应的系数将扭矩分配到电机上,使电机运行在各自高效率的区间。而由电机效率曲线可知,电机效率与转矩-转速并不是线性关系,因此,实际上是一个非线性函数的极值寻优问题。问题可以转化为,任一总需求扭矩下,寻找一个分配系数(λ),使电机的综合效率(ηm)最优,如式(4)、式(5)所示。
λ=Tf×i0×ig/Treq(4)
Treq=Tf×i0×ig+Tr×i0(5)
式中:λ为前后桥转矩分配系数;Tf为前电机转矩;Tr为后电机转矩。
假设车辆传动系统的效率为1,将电机的效率η视为关于转矩T和转速n的函数η(T,n)。则驱动系统的能量利用效率为
ηm=P/Pd(6)
P=Tf×nfη(Tf,nf)×9 550+Tr×nrη(Tr,nr)×9 550(7)
Pd=Td×nw/9 550(8)
nf=nw×i0×ig(9)
nr=nw×i0(10)
式中:Pd为驱动系统总功率;P为电机输出功率;η(Tf,nf)为前桥驱动电机在转矩为Tf转速为nf下的效率;η(Tr,nf)为后桥驱动电机在轉矩为Tr转速为nr下的效率;nf、nr分别为前后轴电机转速;nw为轮速;i0为减速器传动比;ig为变速器传动比。
综上,求不同车速和转矩下的最优效率问题可以转化为求在不同车速和扭矩下电机的最小需求功率。求不同车速和扭矩下电机的最小需求功率的数学模型为
MinP0.5 ≤λ≤1(11)
约束条件为
0≤Tf≤Tfmax0≤Tr≤Trmax0≤Td≤Tfmax+Trmax0≤nf≤nfmax0≤nr≤nrmax(12)
式中:Tfmax、Trmax分别为前后轴电机的最大扭矩;nfmax、nrmax分别为前后轴电机的最大转速。式(12)为式(11)的约束条件,对电机本身的性能进行约束。利用数值计算工具MATLAB对式(11)进行求解,可以得转矩分配系数λ在转矩T和转速n下的最优分配系数,并将其绘制成图4。图4(a)为1档状态下的前后电机扭矩分配系数,图4(b)为2档状态下的前后电机扭矩分配系数。
由图4可以看出:
1)转矩分配系数λ在车速以及扭矩较低时为1,车辆为单电机模式在运行;当需求扭矩较高且车速较快时,λ为0.5,此时两个电机平均分配扭矩,以降低每个电机所承担的扭矩,避免电机处于高转速高扭矩效率较低的场景下。
2)在速度中等时,由单电机驱动转换为双电机平均分配扭矩,且λ变化率较大速度较快,并且双电机平均分配扭矩比单电机模式有效区间更大,较为符合电机效率曲线的高效区间较为宽广这一特性。
3)在部分区域,转矩分配系数有部分波动,但是波动不大分布范围较小,且对效率影响较小,在这里采取平滑处理,使得扭矩分配较为平缓,增加车辆控制的稳定性。
4)在1档时,传动比较低,增大电机转速,而汽车处于低速区间,可以有效提高低速时的系统效率,此时主要使用前电机驱动,但是无法覆盖高速高扭的工况,车辆再提速性能较弱;在2档时,主要为高速工况,前驱部分传动比减小,电机的转速降低,提高了车辆在高速时的扭矩,提高了车辆的动力性。
3效率最优策略的仿真验证
采取联合仿真的方式对该策略进行仿真。在MATLAB Simulink中搭建控制策略,在Avl-Cruise中搭建仿真模型,通过Interface模块进行联合仿真,对不同工况进行整车电耗测试,并且以双电机扭矩平均分配这一模式进行比较,验证前后轴式电动汽车效率最优策略的有效性。
3.1CLTC工况下的经济性分析
目前,主流的汽车能耗测试循环分别为NEDC[新欧洲驾驶循环,图5(a)]、FTP75[1975年美国环保局制定的车辆排放标准,图5(b)]、WLTC[世界轻型汽车测试循环标准,图5(c)]以及CLTC[图5(d)]。其中,FTP75指定时间较早,且没有对新能源车进行优化;NEDC包含4个城市驾驶循环(urban driving cycle,UDC)[图5(a)Part1,800 s]工况和1个郊区驾驶循环(extra-urban driving cycle,EUDC)[图5(a)Part2,400 s]工况,与当前的中国路况相比,郊区路况占比较多且速度较快,并且城市路况较为平均且速度较快;CLTC适用于对轻型燃油汽车、电动汽车以及混合动力汽车的综合工况油耗以及电耗进行测试,工况中包含城市工况、郊区工况以及高速工况,分别为图5(d)中Part1、Part2和Part3,循环时长为1 800 s。WLTC路谱图见图5(c),与CLTC相比增加了超高速工况,超出中国的法定速度范围。目前中国的城市路面情况较为复杂,市区内车辆较多,均速较低,并且加速刹车较为频繁;郊区较为空旷,速度较快,但是经过村庄,速度会降低,高速路况占比较少,而CLTC针对这些做出了修改,較为符合中国真实路况信息,因此,本文中选用CLTC工况作为测速循环工况。
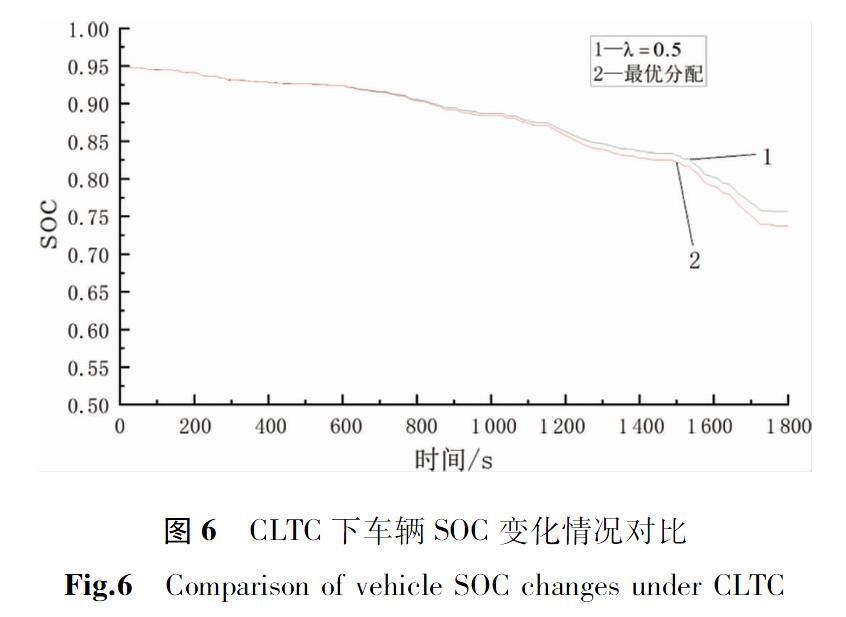
在测试中,初始SOC(state of charge)设为0.95。电池SOC,即荷电状态,用于显示电池电量,其数值为剩余电量占电池容量的百分比,0为电池电量为空,1为电量是满电。在这里一次驾驶循环所用电荷量作为测试汽车转矩分配策略有效性的标准,一次循环后前后轴平均分配扭矩以及最优分配扭矩时SOC变化情况见图6。
由图6可知,SOC在前后轴平均分配扭矩控制以及最优分配扭矩控制的终止值分别为0.756 3和0.737 7,SOC消耗值分别为0.193 7和0.212 3,差值为0.018 6,效果明显。在低速时,主要使用前轴电机驱动,在高转速时基本属于前后轴平均分配扭矩的形式,所以主要在低速时,对扭矩分配进行优化。
3.2最优分配与平均分配的对比
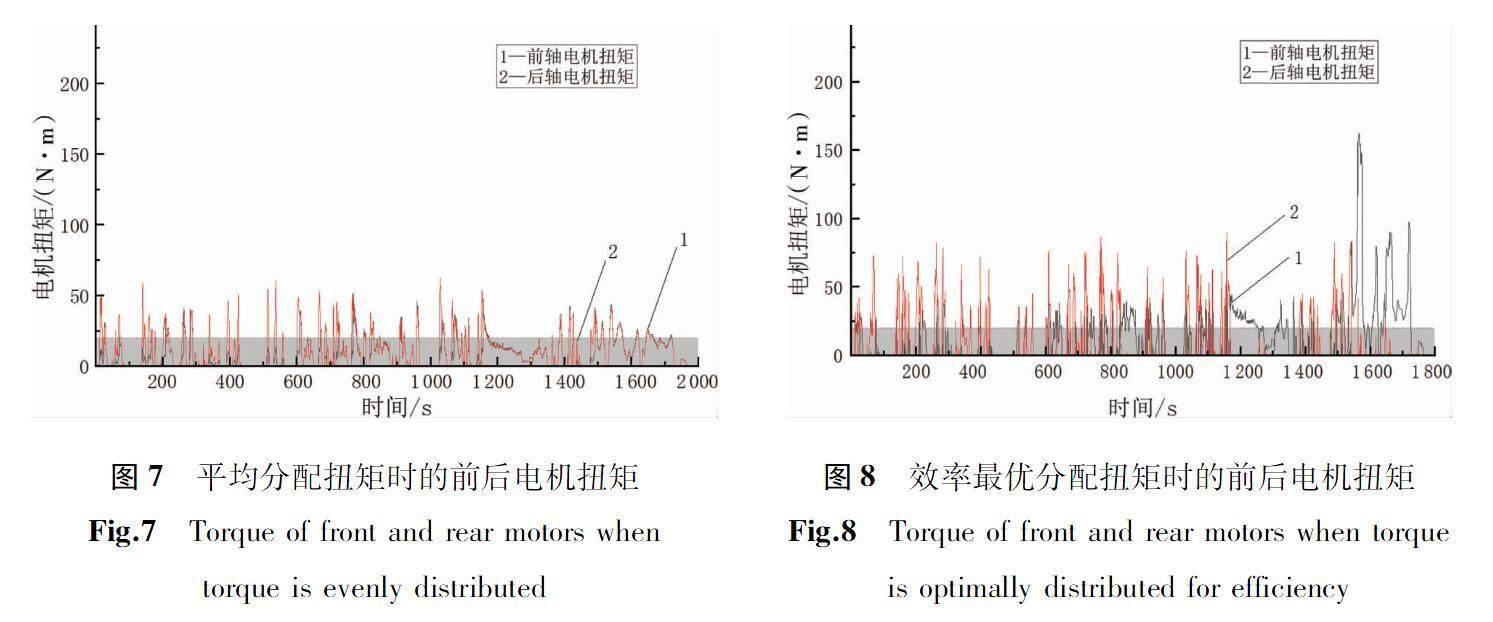
电机扭矩数据见图7和图8,图7为前后轴平均分配扭矩时的数据,图8为效率最优分配扭矩时的扭矩数据。由图7可以看出,当前后轴平均分配扭矩时,前后电机扭矩较小,图中灰色区域为扭矩小于25 N·m时的区域,由图8可以发现,此区域在不同速度下的效率较低。而在最优分配扭矩时,会选用在当前转速下效率相对较高的扭矩分配,因此,可以看出在灰色区域中的工作扭矩显著减少,将工作状态提高到较节能的区间。
在循环过程中,对车辆的转速和扭矩进行取样,每秒钟取一个点,与电机效率图叠加,可以观察出运行时的电机效率,见图9和图10。图9为前后轴平均分配扭矩时的工作点,图10为扭矩最优分配时的工作点,图中圆点为前电机扭矩,叉点为后电机扭矩。由图9可以看出,在平均分配扭矩时,前后电机扭矩主要分布在50 N·m以下,基本处于电机效率较低的部分,不利于电机节能。而由图10可以看出,前置电机运行的扭矩范围扩大到了100 N·m和6 000 r/min,而后置电机基本运行在50 N·m和3 000 r/m附近,大部分电机运行时工作点的效率都被提升到了82%以上,有效降低了驱动能耗。将图9和图10对比可以得出,最优分配可以有效地对电机扭矩进行分配,使电机运行在效率更高的工作点上,有效降低汽车能耗。
4结论
本研究基于一种前后轴式电动四驱汽车,在Avl-Cruise中搭建出了整车仿真模型,并且在MATLAB Simulink中搭建出了控制策略,实现联合仿真环境。在MATLAB Simulink中对控制策略进行优化,搭建传动系统数学模型,以整车效率最优为目标,计算前后轴电机分配系数矩阵,并且在联合仿真环境中进行验证,得出仿真结果。分别在SOC、前后轴电机扭矩以及前后轴电机工作点与原始扭矩分配方法比较。
结果表明,与原扭矩分配策略相比,可以有效分配扭矩,能将电机的工作区域提升到合适区间,提高工作效率,效率最优扭矩分配策略能有效减少电量消耗,电池消耗量降低了8.7%,验证了控制策略的有效性。不足之处在于没有对车辆的防滑性进行验证,避免分配不当造成车辆失控以及换挡逻辑没有针对电机效率进行优化,待之后进行优化。
参考文献:
[1]邹渊, 郭宁远, 张旭东, 等. 分布式电驱动车辆力矩分配控制研究现状综述[J]. 中国公路学报, 2021, 34(9): 1-25.
[2]胡建军, 刘辉, 何铮斌. 驱动力分配控制对车辆转向行驶稳定性的影响[J]. 中国公路学报, 2013, 26(5): 183-190.
[3]武冬梅, 郑敏, 李洋, 等. 智能四驱电动汽车预测节能控制研究[J]. 同济大学学报(自然科学版), 2017, 45(增刊1): 63-68.
[4]夏超英, 杜智明. 混合动力汽车实时优化控制策略仿真分析[J]. 吉林大学学报(工学版), 2016, 46(4): 1276-1286.
[5]王博, 罗禹贡, 范晶晶, 等. 基于控制分配的四轮独立电驱动车辆驱动力分配算法[J]. 汽车工程, 2010, 32(2): 128-132.
[6]范晶晶, 罗禹贡, 张弦, 等. 多轴独立电驱动车辆驱动力的协调控制[J]. 清华大学学报(自然科学版), 2011, 51(4): 478-481.
[7]陈黎卿, 谭雨点, 吴荣, 等. 基于遗传算法的电动四驱汽车轴间扭矩分配控制策略[J]. 农业机械学报, 2017, 48(7): 361-367.
[8]李晓甫. 桥间分配四驱混合动力电动汽车能耗优化控制策略研究[D]. 广东: 华南理工大学, 2012.
[9]漆星, 王群京, 陈龙, 等. 前后轴双电机电动汽车转矩分配优化策略[J]. 电机与控制学报, 2020, 24(3): 62-70, 78.
[10]朱绍鹏, 匡晨阳, 陈平, 等. 分布式四轮驱动电动客车经济性最优转矩分配控制[J]. 汽车技术, 2022(9): 15-22.
[11]杨复钰, 张宝迪, 吕沁阳, 等. 电动汽车双电机耦合驱动系统发展与趋势[J]. 汽车工程学报, 2022, 12(2): 105-113, 136.
[12]RAJAMANI R. Vehicle dynamics and control[M]. 2nd ed. New York: Springer, 2012.
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
系统管理学报(2018年2期)2018-08-13
电子制作(2017年20期)2017-04-26
海外星云(2016年17期)2016-12-01
电子制作(2016年11期)2016-11-07
现代工业经济和信息化(2016年1期)2016-05-17
中国资源综合利用(2016年2期)2016-01-22
电源技术(2015年1期)2015-08-22
电源技术(2015年9期)2015-06-05
