
领导-跟随混合阶异质多智能体系统的一致性
2024-03-15 06:47高林庆王超哈登喆耿华侯帅
河北大学学报(自然科学版) 2024年1期
高林庆,王超,哈登喆,耿华,侯帅
(1.河北工程大学 水利水电学院, 河北 邯郸 056038;2.河北工程大学 信息与电气工程学院, 河北 邯郸 056038;3.天津大学 建筑工程学院,天津 300072)
近年来,多智能体系统快速发展,已在军事装备[1]、移动机器人[2]、洪涝风险评估[3]、多车编队[4]等众多领域取得了广泛应用,而其一致性问题属于基本且重要的热点问题.一致性是指多智能体系统中智能体的某个或某些状态在一定时间内趋于一致.众多学者对多智能体系统的一致性问题展开了广泛研究[5-7].
同质多智能体系统的一致性问题研究已取得了丰硕的成果,Chen等[8]定义了由动态连续时间智能体和动态离散时间智能体构成的有未知干扰的混合系统二阶一致性问题,并利用领导者和跟随者网络下的滑模控制方法解决该问题,最终利用仿真验证了该方法的有效性.Huang等[9]提出一种由李雅普诺夫有向理论和矩阵理论衍生的控制协议,以使二阶非线性智能体系统中不同组内的智能体达到延迟一致性,而使相同组内的智能体达到相同的一致性. Chen等[10]基于耦合强度、李雅普诺夫矩阵特征值和通讯结构提出了一种基于固定和变化拓扑的持续保持控制协议,以改进有内部通讯二阶多智能体领导者和跟随者系统的一致性性能.Zuo等[11]对带有高阶积分器动态特性的智能体系统提出了一种分布式一致性观察器来评估领导者状态,并通过仿真验证了该方法的可行性.Guo等[12]研究了具有有向图的高阶多智能体一致性的干扰抑制问题,仅依赖于每个智能体及其邻居的状态信息,提出了一种采取以完全分布式方式开发的干扰抑制协议,并给出了保证稳定性的充分条件.上述研究通常是解决多智能体的一致性问题,即一致性问题由多个同构的智能体构成,并去解决响应问题.然而在实际工作中,智能体间的动力学模型和特性往往存在差异,即存在多个异质的智能体.例如,在救援救灾过程中的多智能体的特性是不同的,不仅仅会包括单一的一阶、二阶或者高阶智能体,该情况会包含复杂的不同阶次的智能体.
众多学者针对异质多智能体开展了相关的研究工作.Wang等[13]研究了二阶非线性多智能体系统在马尔可夫切换拓扑下领导跟随者的一致性问题,针对异质和均匀多智能体系统,分别设计了一种不连续的分布式自适应的非线性控制率和一种滑膜控制率,并以船舶航向控制仿真系统为例验证了该控制方案的有效性.该异质智能体阶次相同,但是其动态特性是不同的.有学者研究了动态特性相同,但是智能体阶次不相同的混合阶的异质多智能体.Zheng和Wang[14]通过研究线性一致性协议和饱和一致性协议,解决了一阶和二阶积分器型异质多智能体系统的一致性问题.
Geng等[15]研究了混合阶多智能体在有向网络条件下的一致性问题,提出了2种基于线性滤波器、图论和矩阵理论的一致性问题解决协议,并取得了良好的预测效果.Sun等[16]研究了包含有一阶和二阶多动态特性智能体的有向拓扑异质多智能体系统,提出了一种针对无领导者和领导跟随者的具有时间延迟的分布式控制协议.耿华等[17]研究了无向网络中带有一阶静态领导者或二阶动态领导者的混合阶多智能体系统的一致性问题.
综上,在领导-跟随混合阶多智能体系统的相关研究中,一些研究人员针对智能体具有同阶次不同动力学特性以及不同阶次不同动力学特性的多智能体系统的一致性问题进行了相关的研究,其中不同阶不同动力学特性的研究中,一、二阶的异质系统是主要研究对象.然而,在现实的人机协同、多种类无人机编队和不同类智能车协同救灾时,由多类不同阶次智能体构成的异质系统是建模的最佳选择.基于此现实需求,考虑部分跟随者在协调控制中存在舒适度的条件约束,将这类智能体描述为三阶智能体.由此,本文首先研究一种由一阶、二阶和三阶混合智能体构成的领导-跟随混合阶多智能体系统的一致性,其次,分别设计了无向通信网络和有向通信网络下的一致性控制协议,解决了不同通信条件下的一致性聚集问题.
1 预备知识
1.1 图论
定义图为G=(V,E),所有顶点构成的集合V={v1,v2,…,vn}称为点集;所有边构成的集合E={e1,e2,…,en}称为边集.图中的顶点代表多智能体系统中的智能体,边代表智能体之间的信息交互关系.其中E⊆V×V,V×V相当于{(a,b)│a∈V,b∈V},边ek可由其两顶点表示为ek=(vi,vj),进一步地,(vi,vj)表示顶点vj可以把信息传输给顶点vi.
根据图中的边有无方向,可以将图分为无向图和有向图,任一边都没有方向的图为无向图,若图中的边带有指示方向的箭头,则称这样的图为有向图.无向图中,每条边的2顶点可以相互传递信息,而有向图中,带有箭头边上的2顶点间只能依箭头方向单向传递信息.在有向图G中,如果2个顶点vi和vj之间有一条从vi到vj的有向路径,同时还有一条从vj到vi的有向路径则称顶点vi和vj强连通,如果有向图G中每2个顶点都强连通,称图G为强连通图.
对于含有n个顶点的图G,定义元素aij,当顶点vj指向顶点vi时,aij等于1,否则,aij等于0,则称以aij为元素的n×n阶矩阵为图G的邻接矩阵,用符号表示为A=[aij]∈Rn×n.与顶点vi相关联的边的数量称为顶点vi的度,在无向图G中的度矩阵D=diag{di}表示顶点vi的度所构成的对角矩阵,有向图G中度矩阵D=diag{di}表示顶点vi的入度所构成的对角矩阵.对于含有n个顶点的图G,其度矩阵用D表示,其邻接矩阵用A表示,定义L=D-A=(lij)n×n为图G的拉普拉斯矩阵.
引理1[18]有向图G具有n个结点,其拉普拉斯矩阵L至少有1个零特征值,且所有的非零特征值均具有正实部.L只有1个零特征值,当且仅当有向图G有1个生成树.此时,向量l=[1,…,1]T是零特征值对应的特征向量.
1.2 异质多智能体系统
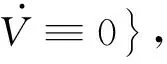
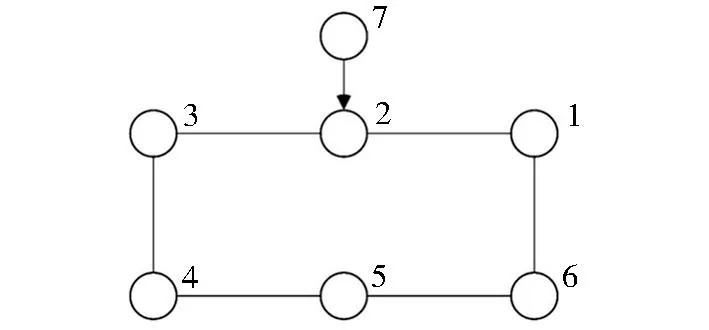
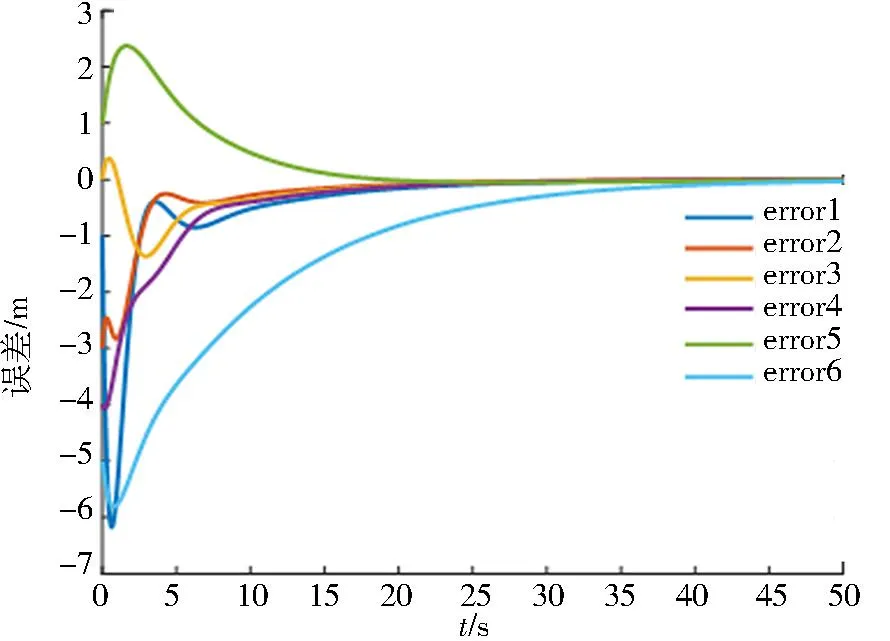
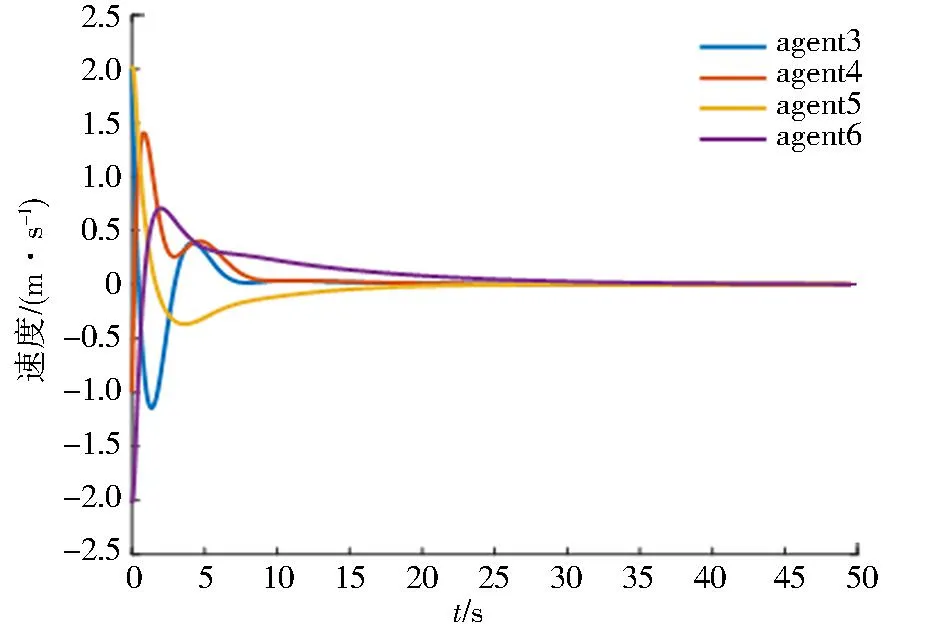
异质多智能体系统由1个领导者和n个跟随者组成.其跟随者中,有l个一阶积分器智能体,(m-l)个二阶积分器智能体,(n-m)个三阶积分器智能体组成,0 (1) 其中xi(t)∈R为位置信息,ui(t)∈R为控制输入. 二阶智能体的动态方程为 (2) 其中xi(t)∈R为位置信息,vi(t)∈R为速度信息,ui(t)∈R为控制输入. 三阶智能体的动态方程为 (3) 其中xi(t)∈R为位置信息,vi(t)∈R为速度信息,zi(t)∈R为加速度信息,ui(t)∈R为控制输入. 领导者为静态领导者,编号为n+1,其动态方程为 (4) 其中c为一给定常数. 定义1由式(1)~(4)组成的领导-跟随异质多智能体系统,其实现一致性聚集,如果对于任何初始条件,以下方程成立: 引理2[19]对于如下所定义的线性滤波器 本节分别研究了无向通信和有向通信网络条件下,由一阶、二阶和三阶组成的领导-跟随异质多智能体系统的一致性聚集问题. 由式(1)~(4)组成的混合阶多智能体系统中的n个跟随者之间是无向通信的,编号为1~l,l+1~m,m+1~n的智能体分别是一阶、二阶和三阶的智能体. 对每个二阶智能体设计如下线性滤波器 (5) 对每个三阶智能体设计如下2个线性滤波器 (6) 为简便起见,本文以下内容将带变量t的符号省略t,如xi(t)、ui(t)、γ1i(t)分别简记为xi、ui、γ1i等. 一致性协议设计如下所示: (7) 式(7)中,A=[αij]n×n为加权邻接矩阵,aij为A的元素,B=diag{bi(n+1)}为跟随者与领导者邻接矩阵,bi(n+1)为B的元素,α1>0,α2>0,α3>0为滤波器参数.ε=[x1,…,xl,γ1(l+1),…,γ1(m),γ3(m+1),…,γ3(n)]T为状态向量,εi、εj分别为ε的第i个、第j个分量. 基于上述一致性协议,可得定理1. 定理1假设系统由式(1)~(4)组成,跟随者之间的通信拓扑是固定无向连通的,如果条件α1=α2=α3=1成立,应用协议(7),可解决混合阶多智能体系统的聚集问题. 证明:应用一致性协议(7)后,闭环系统可表示为 (8) (9) 将公式(9)写成误差形式,则如下式所示: (10) 利用李雅普诺夫直接法构造李雅普诺夫函数如下: (11) 对式(11)求导后则得到 (12) 由于跟随者拓扑图是无向连通的,因此可得 (13) 应用拉塞尔不变集原理可得不变集 (14) 也就是 (15) 由对称性可得 (16) 当t→∞时,可知 ei=xi-xn+1=0i=1,2,…,l, (17) 由α1=1,可推得ei收敛于0. 同理α2=α3=1,可知当i=l+1,l+2,…,m和i=m+1,m+2,…,n时,ei收敛于0,xi-xn+1也收敛于0. 系统是由式(1)~(4)组成的混合阶多智能体系统,跟随者是通信拓扑,是有向的,基于上述设计线性滤波器的方法,提出如下一致性协议: (18) 式中,A=[αij]n×n为加权邻接矩阵,aij为A的元素,α1>0,α2>0,α3>0为滤波器参数.ε=[x1,…,xl,γ1(l+1),…,γ1(m),γ3(m+1),…,γ3(n)]T为状态向量,εi、εj为ε的第i个、第j个分量. 基于上述一致性协议,可得定理2. 定理2假设跟随者之间通讯拓扑图是固定有向的,且强连通的,基于滤波器(5)~(6)以及上述一致性协议,在α1=1,α2-α3≠0,α2α3=1条件满足时,一致性问题可得到解决. 证明:领导者动态方程为 (19) 由于领导者只发送信息而不接受信息,所以所有α(n+1)i=0领导者动态方程可改写成 (20) 基于一致性协议可将闭环领导跟随系统写成下式 (21) 写成向量形式 (22) 其中 (23) 由引理1可知,上述系统可实现一致性,假设一致性状态为[k,…,k]T,k∈R,也就是 (24) 线性滤波器状态满足下式 (25) 求解上述方程,可知 (26) 已知α1=1,α2-α3≠0,α2α3=1,故一致性实现,即 (27) 一致性状态k由0特征值对应的右特征向量和左特征向量以及初始条件决定,即 (28) 异质多智能体系统由一阶、二阶和三阶智能体组成,编号1、2的智能体为一阶智能体,编号3、4的智能体为二阶智能体,编号5、6的智能体为三阶智能体,编号7的智能体为静态领导者. 算例1令α1=1,α2=1,α3=1,跟随者之间的通信拓扑图是固定无向连通的,如图1所示.由图1可知,跟随者之间的邻接矩阵A以及跟随者与领导者之间的邻接矩阵B. 图1 固定无向通讯拓扑Fig.1 Fixed undirected communication topology diagram 设定位置初始值[x1,x2,x3,x4,x5,x6]=[-1,-3,0,-4,1,-5],速度初始值[v3,v4,v5,v6]=[2,-1,2,-2],加速度初始值为[z5,z6]=[1,-1],静态领导者位置x7=2.图2、图3和图4显示了各智能体参数轨迹的变化过程. 图2 无向多智能体位置轨迹变化Fig.2 Undirected multi-agent position trajectory variation 图3 无向多智能体速度轨迹变化Fig.3 Undirected multi-agent velocity trajectory variation 图4 无向多智能体加速度轨迹变化Fig.4 Undirected multi-agent acceleration trajectory variation 通过观察图2、图3和图4,可以发现,5号和6号智能体的加速度随时间的增加趋近于零,3号、4号、5号和6号智能体的速度随时间的增加趋近于零,1号、2号、3号、4号、5号和6号智能体与7号智能体(领导者)的位置误差趋近于零,跟随者与领导者的位置趋近一致且保持静止,领导者-跟随者的一致性得到解决.该仿真结果验证了定理1的正确性和一致性协议(7)的有效性. 算例2令α1=1,α2=8,α3=0.125,满足定理2成立的条件,即α1=1,α2-α3≠0,α2α3=1.类似算例1,将异质智能体以一种较为简单的交互方式有向连接,如图5所示.根据图5,可以得到邻接矩阵A和B,矩阵A表示跟随者之间可以进行有向交互,矩阵B表示领导者仅把信息有向传递给2号智能体. 图5 有向通讯拓扑Fig.5 Directed communication topology 假设位置初始值[x1,x2,x3,x4,x5,x6]=[-1,-3,0,-4,1,-5],速度初始值[v3,v4,v5,v6]=[2,-1,2,-2],加速度初始值为[z5,z6]=[1,-1],静态领导者位置x7=2.图6、图7和图8显示了各智能体参数轨迹的变化过程. 图6 有向多智能体位置轨迹变化Fig.6 Directed multi-agent position trajectory variation 图7 有向多智能体速度轨迹变化Fig.7 Directed multi-agent velocity trajectory variation 图8 有向多智能体加速度轨迹变化Fig.8 Directed multi-agent acceleration trajectory variation 通过观察图6、图7和图8,可以发现,5号和6号智能体的加速度随时间的增加趋近于零,3号、4号、5号和6号智能体的速度随时间的增加趋近于零,1号、2号、3号、4号、5号和6号智能体与7号智能体(领导者)的位置误差趋近于零,跟随者与领导者的位置趋近一致且保持静止,领导者-跟随者的一致性得到解决.该仿真结果验证了定理2的正确性和一致性协议(18)的有效性. 研究了领导-跟随混合阶异质多智能体系统的一致性问题.首先,在领导-跟随无向通讯网络条件下,提出了一种解决混合阶异质多智能体系统聚集问题的一致性协议,并通过仿真实验验证本文提出的方法能够有效地解决一阶、二阶和三阶混合阶多智能体系统的一致性问题;其次,提出了一种一致性协议来解决领导-跟随有向通讯网络条件下一阶、二阶和三阶混合阶异质多智能体系统的一致性问题.为复杂情况中无向和有向通讯网络条件下多智能体系统的运行提供了有效解决方案.此外,本文提出的一致性协议可以扩展至更高阶的无向和有向通讯网络条件下的多智能体系统中,并可以有效应用于洪涝灾害防范、水面无人船、水下无人潜水器、抗震救灾机器人等多智能体中.
2 主要结论
2.1 无向网络中的一致性聚集问题
2.2 有向网络下混合阶多智能体系统聚集问题
3 仿真实验




4 结论
猜你喜欢
数学物理学报(2022年2期)2022-04-26
中国广播(2017年9期)2017-09-30
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15
诗潮(2017年5期)2017-06-01
山西大同大学学报(自然科学版)(2016年6期)2016-01-30
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
中央民族大学学报(自然科学版)(2015年2期)2015-06-09
中南财经政法大学学报(2015年5期)2015-04-07
物理实验(2015年10期)2015-02-28
国外科技新书评介(2014年12期)2015-01-05
