基于趋近率的永磁同步电动机滑模变结构抖振
2010-06-02 09:55胡强晖胡勤丰
电机与控制应用 2010年12期
胡强晖, 胡勤丰
(南京航空航天大学航空电源重点实验室,江苏南京 210016)
0 引言
近年来,国内外许多学者就滑模控制在永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)中的应用展开了一系列的研究并取得了部分成果[1-8]。但由于系统的时间延迟和空间滞后等因素影响,滑模控制存在严重抖振。目前,抖振的存在已经严重制约了滑模变结构在高精度PMSM中的应用。文献[9]应用饱和函数代替开关函数,仿真表明其在一定程度上削弱了抖振,但同时也减弱了系统的鲁棒性。文献[10]应用观测器观测负载扰动并加以补偿,该方法通过减小非线性项,能较好地减小抖振,但因增加了观测器而增加了系统设计的复杂性,而且系统抖振的存在影响观测精度,实际难以达到理想的改善效果。文献[11]采用趋近率滑模并进行仿真,该方法用线性化函数控制代替非线性控制,改善了系统动态和稳态性能,但存在比较严重的抖振。文献[12]采用一种新的变指数趋近律滑模控制器,解决了电机匀速运行时的抖振问题,但没有考虑不在滑动模态阶段时抖动大的问题。
本文针对以上问题,设计了一种新的加权变指数趋近率控制器,该控制和空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)相结合来代替传统的控制方法。该方法既可以很好地利用滑模控制的强鲁棒性和动态性,同时也可以消除滑模控制本身的固有缺点抖振,有效地改善了电机的动、静态特性。
1 PMSM的数学模型
在不影响控制性能的前提下,假设磁路不饱和,不计磁滞和涡流损耗的影响,空间磁场呈正弦分布。采用id=0的PMSM转子磁场控制,转矩的大小只与定子电流幅值成正比,实现了PMSM的解耦控制,此时有:

PMSM的电磁转矩方程为

PMSM的运动方程为

式中:iq,uq——q 轴电流、电压;
R——定子相电阻;
L——等效 d,q 轴电感;
pn——极对数;
Ψ——转子永磁体产生的磁链;
ω——转子机械角速度;
J——折算到电机轴上的总转动惯量;
TL——折算到电机轴上的总负载转矩。
取系统的状态变量为

式中:ω*——给定转速;
ω——实际转速。
根据式(1)~(3)可得:

2 滑模控制器的设计
滑模变结构控制(Sliding Mode Variable Structure Control,SMC)的运动由两部分组成:一是系统从任意初始状态趋向切换面,直到达切换面的运动阶段,称为趋近运动,趋近运动为s→0的过程;二是系统在切换面附近沿切换面向稳定点运动的滑模运动阶段。高为炳院士于20世纪提出趋近律的概念,并设计了指数趋近律如式(6)所示,规定了滑模控制过程中系统的状态轨迹,在国内外得到了广泛应用。

该控制方法不仅可以对系统在切换面附近或沿切换面的滑模运动段进行分析,而且可以有效地对系统趋近段的动态过程进行分析和设计。趋近速度从一个较大值逐步减小到零,不仅缩短了趋近时间,而且使运动点到达切换面时的速度很小,从而保证系统在整个状态空间的任何位置运动点在有限时间内到达切换面的要求,改善了趋近运动的动态品质。
对数字化离散时间系统,指数趋近律有自身的缺点,其切换为带状。系统在切换带中向原点运动时,最后不能趋近于原点,而是趋近于原点附近进行抖振。此高频抖振可激发系统未考虑的高频成分,增加系统运算的负担。对此,文献[9]对指数趋近率进行了改进,设计为变指数趋近率:

变指数趋近律让系统状态量开始时以变速和指数两种速率趋向滑模面,当接近滑模面时,指数项接近于零,-ε|x|sgn(s)变速项起关键作用。当选取的状态量x在系统稳定过程中无限趋向于零时,滑模控制律的作用让状态量X进入滑模面并向原点运动,此过程又让控制律中的控制项-ε|x|sgn(s)不断减小,最终稳定于原点。一旦稳定在原点,造成滑模抖振的控制项sgn(s)系数变为零,最终消除抖振。
该设计很好地解决了滑模运动阶段的抖振问题,但没有对趋近阶段x值较大、造成切换增益较大、抖振严重的情况进行分析。因此本文采用新的加权积分增益趋近率:

在积分项ρ的表达式中,当ρ>0时,Kfρ<0,当 ρ<0 时,Kfρ>0。
用新的积分相ρ代替X,在滑动模态阶段当s趋近于零时,s的积分亦趋近于零,ρ值也趋向于0,并最终可消除sgn(s)项;在趋近阶段由于在积分项中引入负的加权值Kf,可使其切换增益大大降低,有效避免了变指数趋近率趋近阶段切换增益大、抖振严重的情况。
2.1 滑模面及控制规律的设计
选择一阶滑模面:

为了提高系统的动态品质,用新的加权积分增益趋近率来设计电机的控制器。PMSM的加权积分增益趋近率为

式中:ε、k是可设定的变指数趋近率参数;在积分项ρ的表达式中,Kf是加权系数。
由式(5)、(9)、(10)可得:

由式(10)可解得:

式中:f是初始值。可以看出,当系统不在滑模面时,选择合适的加权值Kf可以大大减小ρ值。当t→∞时,ρ快速趋向于0,ud幅度越来越小,理想情况最终会稳定于原点,导致抖振的滑模切换项sgn(s)消失,抖振消除。通常Kf、k值可以设置得大一些,这样系统会以非常快的速度进入滑模面,同时进入滑模面切换带的速度十分小,不会产生大的抖振,更快地趋近于原点,优点十分显著。
为了进一步削弱到达原点前状态变量运动轨迹的抖振,符号函数采用平滑处理为[13]

式中:σ——一个数值较小的正常数。
最后将控制输出经一积分器。一方面,由于控制的非线性,系统存在抖振现象,输出经过积分器滤波,可削弱抖振;另一方面,使输出具有积分环节,消除了稳态误差。由上可获得最终控制量iq。
2.2 稳定性分析
定义Lyapunov函数为

3 仿真研究试验
为了验证所设计的SMC算法的正确性,对PMSM调速系统进行了仿真。系统采用图1所示的控制框图,速度调节器采用SMC,并分别运用指数趋近率、变指数趋近率、加权积分增益趋近率对系统进行仿真研究。
对比图2~4可见:指数趋近率的切换输出相为一高频变化量,增益参数ε决定变化幅值大小,是系统克服扰动及外干扰的主要参数。ε越大,系统克服干扰的能力越强,而抖振幅值亦增大;变指数和加权积分趋近率的切换项最终都趋向于0,而加权积分增益趋近率的起动切换项比变指数趋近率的小的多。可见在系统整个调速过程中,加权积分增益趋近率比其他两种更好地解决了滑模变结构的抖振问题。
图5为在t=0.1 s时突加1.5 N·m负载时的转速波形图。可见,SMC下转速变化很小,可以快速恢复到给定转速,充分体现了滑模控制很强的鲁棒性。

图1 系统结构框图

图2 指数趋近率切换量ud变化图

图3 变指数趋近率切换量ud变化图
4 试验结果

图4 加权积分增益指数趋近率切换量ud变化图

图5 加权积分增益指数趋近率速度时间曲线
本文对所提出的试验方案进行了验证。PMSM参数如下:额定电流3.1 A;额定电压220 V;额定转速3000r/min;额定转矩1.6N·m;直交轴电感21.9 mH;转动惯量0.000 152 kg·m-2;极对数2;转子磁通0.186 2 Wb。主电路三相电压源逆变器采用三菱智能功率模块,工作频率10 kHz。试验结果如图6~12所示。
对比图6、7、10可见,后两种方法比传统趋近率控制方法的速度波形更加平稳、电流波形更加光滑,解决了滑动阶段的抖振问题,验证了理论的正确性。从图9可看出,加权积分增益型变指数趋近率可快速无超调地上升到给定转速,电机转动平稳。该系统不到15 ms即可很平滑地到达给定转速。

图6 指数趋近率速度、相电流放大波形
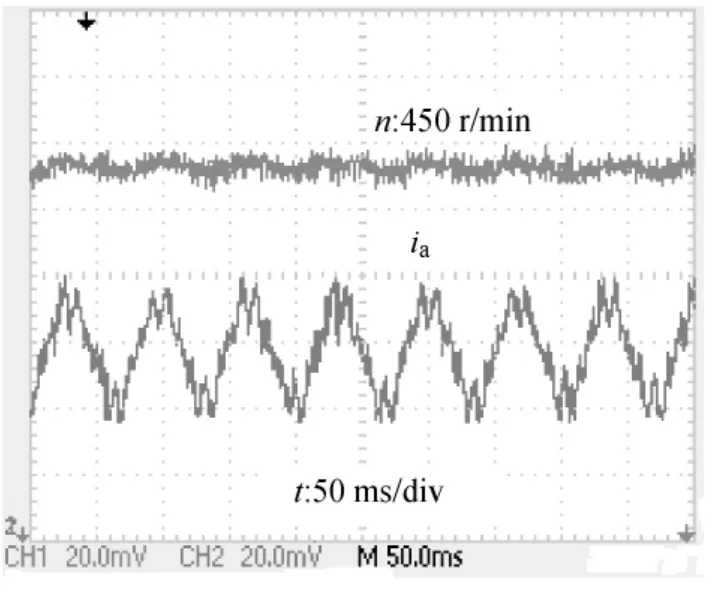
图7 变指数趋近率速度、相电流放大波形

图8 变指数趋近率起动阶段速度、电流放大波形

图9 加权积分增益型变指数趋近率速度、电流波形

图10 加权积分增益型变指数趋近率速度、电流放大波形
对比图8、11可见,在起动阶段,加权积分趋近率的电流波形变化较小,减小了起动阶段的电流冲击,比较好地解决了起动阶段变指数趋近率切换增益大的缺点。
从图12可看出,在突加载的情况下,电机的转速基本没有变化,表现出了滑模控制很强的鲁棒性。
5 结语

图11 加权积分增益型变指数趋近率起动阶段速度、电流放大图

图12 加权积分增益型变指数趋近率突加载试验
本文针对趋近率滑模控制运用于PMSM伺服系统中存在严重抖振的情况,采用了加权积分增益来消除SMC本身的固有缺点,通过仿真和试验表明该方案有效地消除了系统中的抖振。其优点如下:
(1)不需要增加任何硬件,完全软件实现,实时性好。速度SMC使系统无超调地达到最高转速,提高了系统的快速性。
(2)该策略大大减小了趋近率控制系统中的抖振,可用来实现高精度的速度定位。
(3)鲁棒性强。SMC对系统模型要求较低,对内部参数摄动、外部干扰、测量误差及测量噪声等具有完全的自适应性。
综上所述,本文通过对趋近率的改进,较好地实现了变结构系统的速度控制及抖振抑制,仿真计算和试验样机的结果均验证了文中所提出控制模型及其算法的正确性和有效性。
[1]Rong Jong Wait,Shun Lin Yu Q,Kuo Ho Su.Development of adaptive fuzzy control for electrical servo drive via total sliding mode technique[J].FUZZIEEE,2004,25(29):807-812.
[2]Mainali K,Panda S K,Xu J X.Position tracking of linear piezoelectric motor using sliding mode control with closed-loop filtering [J].Industrial Electronics Society,2004,3(2):2406-2411.
[3]Roy A Mc Cann,Mohammad S Islam.Application of a sliding-mode observer for position and speed estimation in switched reluctance motor drives[J].IEEE Transactions on Industry Applications,2001,37(1):51-58.
[4]Zadeh,Yazdian,Mohamadian.Robust position control in DC motor by fuzzy sliding mode control[J].Power Electronics,Electrical Drives,Automation and Motion,2006,23(26):1413-1418.
[5]Phongsak Phakamach1,Chumphol Akkaraphong.Anoptimal feedforward integral variable structure controller for the electrohydraulic position servo control systems[J].IEEE 2004:459-462.
[6]常进,张曾科.基于变结构控制的感应电机能量优化控制[J].清华大学学报,2007,47(10):1596-1597.
[7]刘云峰,缪栋.电液伺服系统的自适应模糊滑模控制研究[J].中国电机工程学报,2006,26(14):140-144.
[8]贾洪平,贺益康.永磁同步电机滑模变结构直接转矩控制[J].电工技术学报,2006,21(1):1-6.
[9]Zhang D Q,Panda S K.Chattering-free and fastresponse sliding mode controller[J].IEE Proc-Control Theory,1999,146(2):171-177.
[10]张希,陈宗祥,潘俊民,等.永磁直线同步电机的固定边界层滑模控制[J].中国电机工程学报,2006,26(22):115-121.
[11]葛宝明,郑琼林,蒋静坪,等.基于离散时间趋近率控制与内模控制的永磁同步电动机传动系统[J].中国电机工程学报,2004,24(11):106-111.
[12]童克文,张兴.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21):102-106.
[13]Kim M,Song D.A robust control of permanent synchronous motor using load torque estimation[C]∥IEEE Int Symposium on industrial Electronics Pusan,Korea,2001(2):1157-1162.
[14]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
现代苏州(2019年16期)2019-09-27
语言与文化论坛(2019年3期)2019-04-13
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电子制作(2018年19期)2018-11-14
湖北文理学院学报(2017年2期)2017-04-16
燕山大学学报(2015年4期)2015-12-25