永磁同步电动机矢量控制
2010-06-02 09:55刘艳萍高美卿
电机与控制应用 2010年12期
连 琨, 刘艳萍, 高美卿
(河北工业大学信息学院,天津 300130)
0 引言
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)在伺服驱动方面具有许多其他传统电机不具备的优势。它用永磁体代替励磁绕组产生恒定磁场,无需励磁线圈、电刷和滑环,因此其体积小、结构简单,在相等的输出情况下,永磁电动机功率因数大等特点,使得PMSM应用在精密仪器、机器人、航空领域等高要求场合[1]。
为实现高性能的控制要求,本文采用空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)技术,以TMS320F2812为核心实现。
1 PMSM数学模型
PMSM是整个控制系统的研究对象,建立PMSM的数学模型有利于分析电动机的动态和稳态性能。为了研究方便,模型的建立基于以下假设基础之上:(1)忽略磁路中铁心的磁饱和;(2)不计铁心的涡流损耗与磁滞损耗,认为磁路是线性的;(3)定子电枢绕组的空载电势是正弦波;(4)转子上无阻尼绕组,永磁体也没有阻尼;(5)永磁材料的电导率为零。
在电机内部建立一个与转子同步旋转的d-q坐标系,让d轴与转子磁极同向,则PMSM在此坐标系下的数学模型为

式中:ud、uq——定子绕组的直、交轴电压分量;
id、iq——定子绕组的直、交轴电流分量;
Ld、Lq——PMSM 的直、交轴电感;
Rs——定子绕组电阻;
Ψf——转子上永磁体产生的磁场;
ω——转子电角速度,ω =npωr;
ωr——机械角速度;
p——微分算子;
np——极对数。
电磁转矩方程为

式中:第一项是主电磁转矩,第二项是由转子凸极效应引起的磁阻转矩。对于转子为表面式的PMSM Ld=Lq,故式(2)可写为

这样PMSM的电磁转矩Te就正比于交轴电流iq,通过控制iq即可控制Te,从而控制转速,得到了与直流电动机相似的控制特性。
2 矢量控制变频调速的基本原理
所谓矢量控制,简单说就是实现了PMSM定子绕组电流磁场分量和转矩分量的解耦。电流内环、速度外环的双闭环控制系统,根据给定转速n*与反馈转速n相比较,偏差值经过PI控制器后作为电流环的电流给定信号i,定子相电流ia和ib通过相电流检测电路提取出来,经过坐标Clarke和Park变换转换到d-q旋转坐标系中,d-q坐标系中的电流信号再与它们的参考输入i和i相比较,其中i=0,经电流PI控制器分别输出为直轴电压u和交轴电压u,再经Park逆变换得到u和 u,最后通过SVPWM模块输出六路控制信号来驱动逆变器工作,从而得到了控制定子三相对称绕组的实际电流。控制原理框图如图1所示。外环产生定子电流的参考值,内环得到实际的控制信号,这样就构成一个完整的速度矢量双闭环控制系统[2-4]。
3 系统硬件设计

图1 矢量控制原理框图
PMSM矢量控制系统由主电路、驱动电路和控制电路等部分构成。根据系统的要求,主电路采用交-直-交电压型逆变器,由三相整流电路、逆变器和PMSM构成;控制电路以TMS320F2812处理器为核心,实现电流环和速度环的采样控制算法,产生SVPWM控制信号。整体系统硬件如图2所示。

图2 系统硬件原理图
3.1 电压转换电路
TMS320F2812采用C2XX数字信号处理器(Digital Signal Processing,DSP)的内核,内核供电电压降为1.8 V,I/O供电电压及Flash编程电压为3.3 V。保证芯片的低功耗,利用专用的低噪声电压调节器TPS767D318把电源输出的+5 V转换成+3.3 V和+1.8 V。其电路图如图3所示。
3.2 存储器单元
存储器使用Cypress公司提供的高性能SRAM,型号是7Y7C1041,读写周期为15 ns。它能满足系统工作电压要求与 DSP接口简单,其电路如图4所示。
3.3 电流采样单元
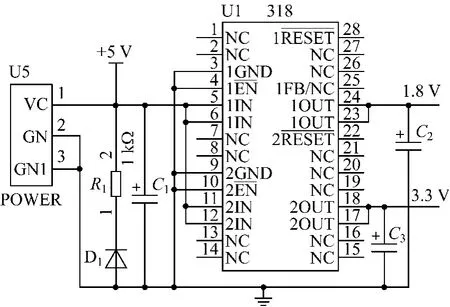
图3 电源产生电路

图4 7Y7C1041接口电路
电流检测直接关系到整个控制系统的实现精度。霍尔电流传感器是目前使用广泛的电流检测和过保护元件,其精度高、线性度好、响应速度快。由于霍尔元件输出的交流信号很弱,TMS320F2812片内A/D转换器为单极性0~3 V电压信号,因此要将电流信号转换成电压,加电压偏移电路,为防止电压过高,还必须由二极管组成限幅。电路图如图5所示。
4 系统软件设计

图5 电流检测电路
整个软件采用模块化设计,包括主程序和中断服务子程序。主程序的作用是对系统程序的初始化,并且设立死循环程序作为液晶显示和按键扫描,等待中断程序的产生。初始化程序是在主程序执行前对系统进行初始化,并对系统控制对象的某些初始信息进行辨识的程序,是主程序不可或缺的一部分。其程序流程图如图6所示。中断服务子程序是系统的关键部分,定时器1下溢中断包括了对U相和V相电流的检测、坐标变换,最终产生SVPWM波,其框图如图7所示。
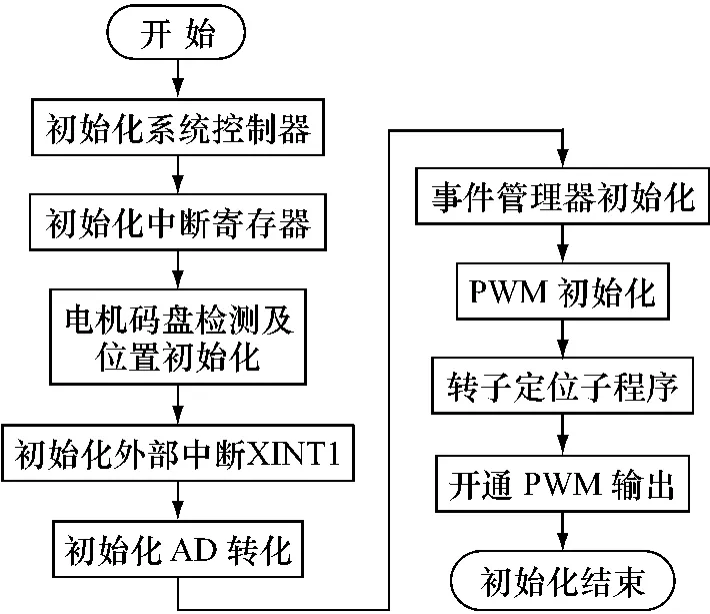
图6 初始化流程图

图7 定时器1下溢中断流程图
5 试验结果及分析
试验中所用到的三相PMSM参数如下:额定转矩T为1.6 N·m,额定电压220 V AC,额定转速3 000 r/min,定子绕组电阻为1.82 Ω,电感为10 mH。以下是采集的试验结果通过CCStudio_v3.1的图形显示功能,把结果作图显示,增加直观感。
电流环是高性能伺服系统构成的根本,其动态响应特性直接关系到矢量控制策略的实现。图8所示为q轴给定电流与q轴反馈调节电流波形。从图中可以看出反馈的电流基本能很快地跟随给定电流变化,超调小,反应速度快。

图8 电流环电流跟踪波形
图9是电机在固定负载情况下的速度跟踪波形,给定电机频率为5 Hz,速度为±1 500 r/min,反馈速度能很快跟随,而且接近无超调。

图9 固定负载下的速度跟踪波形
图10是电机在可变负载情况下的速度跟踪波形。该负载在电机速度为±1 500 r/min时,所消耗的功率为 171 W/h,对电机的力矩则是1.146 N·m,其速度调节的波形如图10所示。

图10 可变负载下的速度跟踪波形
由于电机所带的负载是随速度的增加而增加,同时电流环处于饱和值,所以在速度的绝对值上升到一定值时,电机的加速度变小,速度曲线变弯;但反馈速度值还是很快跟上给定速度值,基本无超调。
6 结语
随着电力工业在国民经济中所占地位的提高,电动机在现代化生产和生活中扮演着十分重要的角色。基于TMS320F2812的PMSM数字化矢量控制试验可知,PMSM转速超调小、响应快、调速范围广及鲁棒性强,具有一定的理论意义和实用价值。
[1]王成元,夏加宽.电机现代控制技术[M].北京:机械工业出版社,2006.
[2]江安民,程显.DSP应用开发实用子程序「M].北京:人民邮电出版社,2005.
[3]王晓明,王玲.电动机的DSP控制-TI公司DSP应用[M].北京:北京航空航天大学,2004.
[4]张邑,张兴.永磁同步电机直接转矩控制系统的改进[J].合肥工业大学学报,2007,30(5):546-548.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年2期)2016-04-12
新高考·高一物理(2016年1期)2016-03-05
云南电力技术(2015年2期)2015-08-23
电机与控制应用(2015年10期)2015-03-01