
基于模糊PID控制器的汽车雨刮系统的研究
2010-07-09 11:29张春晶
制造业自动化 2010年2期
赵 岩,张春晶
(黑龙江科技学院 电气与信息工程学院,哈尔滨 150027)
0 引言
模糊控制不需要建立精确的数学模型,而是运用模糊理论将人的经验知识、思维进行推理,控制过程的方法与策略由所谓模糊控制器来实现。模糊控制对那些难以获得数学模型或模型非常粗糙的工业系统有独特优势。传统的PID控制技术已经比较成熟,结构简单,性能稳定可靠,但也存在一些不足。例如,无法有效克服负载参数的大范围变化和非线性因素对系统造成的影响,因而,不能满足高性能、高精度的要求。因此,模糊控制理论在工业控制领域中能发挥重要作用。我们采用参数自整定模糊PID控制器,代替传统的PID调节器,就是将模糊控制中模糊推理的思想和常规的PID控制结合起来,将误差和误差变化率作为模糊推理机的输入,然后对PID的3个参数进行在线自整定。这样可以取得较好的控制效果。
1 工作原理
本文设计的雨刮器是采用具有高速和低速两个档位的雨刮电机来同时控制两个雨刮,雨刮器不工作时,两个雨刮都停在风挡玻璃的中间,即雨刮电机复位位置。我们用PIC单片机来控制整个系统,当PIC16F873的 RA0口检测到红外线雨滴传感器的信号时,即有雨滴落在风挡玻璃上,两个雨刮就分别左右摆动,当小雨时,雨刮器工作在低速挡,当大雨时,雨刮器工作在高速挡。由于生产工艺的问题,两个雨刮电机的转速不可能完全一样,就会存在两个雨刮摆动不同步的问题。用电机的复位信号来检测两个雨刮运动的快慢,哪个雨刮先到复位位置,说明它快,通过单片机的PWM口(RC1和RC2),对快的进行斩波。雨刮每运行一个周期比较一次,哪个先到复位位置就对哪个斩波,直到两个雨刮无论在低速状态还是高速状态,都达到同步摆动[1]。系统方框图如图1所示。

图1 汽车雨刮系统方框图
2 模糊控制原理
在汽车雨刮系统中,有许多非线性因素都会对雨刮同步造成影响。这样,我们就需要用人的经验知识来调整PWM信号的占空比。使两个雨刮同步摆动。因此,考虑将PID控制算法的实用性与模糊控制算法的智能性相结合,实现优势互补,研究一种参数自整定模糊PID控制器对汽车雨刮控制系统进行控制。可以减小系统的振荡性、超调量和调节时间,提高系统总体控制效果的性能指标。典型的模糊自整定PID控制系统的结构如图2所示。

图2 参数自整定模糊PID控制器结构图
模糊控制器是模糊控制的关键,本模糊控制器的输入语言变量是两个雨刮到达复位位置的时间偏差绝对值|E|和时间偏差变化率绝对值|EC|,输出语言变量是PID参数KP、KI、KD,输入、输出语言变量的语言值分别为负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PB),其隶属度函数为三角形。解模糊化(defuzzification)采用加权平均的重心法[2]。
模糊控制设计的核心是总结设计人员的技术知识和实际操作经验,建立合适的模糊规则表。下面根据参数KP、KI和KD对系统输出特性的影响情况,在不同的|E|和|EC|时,被控过程对参数KP、KI、KD的自整定要求为:1)当误差|E|较大时,为加快系统的响应速度,应取较大的KP;同时为了避免系统在初始时,由于误差的瞬时增大可能出现的微分饱和而使控制作用超出允许的范围,此时,应取较小的KD。同时,为了防止系统响应出现较大的超调,产生积分饱和,对积分作用应加以限制,所以,此时应取KI=0。2)当误差|E|适中时,为使系统具有较小的超调,应取稍小的KP;此时KD的取值对系统的影响较大,所以KD的值要大小适中,以保证系统的响应速度。同时,可增加一些积分对控制的作用,KI太大,易造成积分饱和,太小不能加快系统响应速度,所以KI取值要适当。3)当误差|E|较小时,为使系统具有良好的稳态性能,应取较大的KP、KI;同时为避免系统在设定值附近产生振荡,KD值的选择非常重要。一般情况下:当|E|较小时,KD可取大些,当|E|变大时,KD可取小些[3]。
由以上分析和语言变量的定义,我们可以总结出KP、KI、KD的自调整规则,分别如表1,表2,表3所示。

表1 KP调整规则表

表2 KZ调整规则表
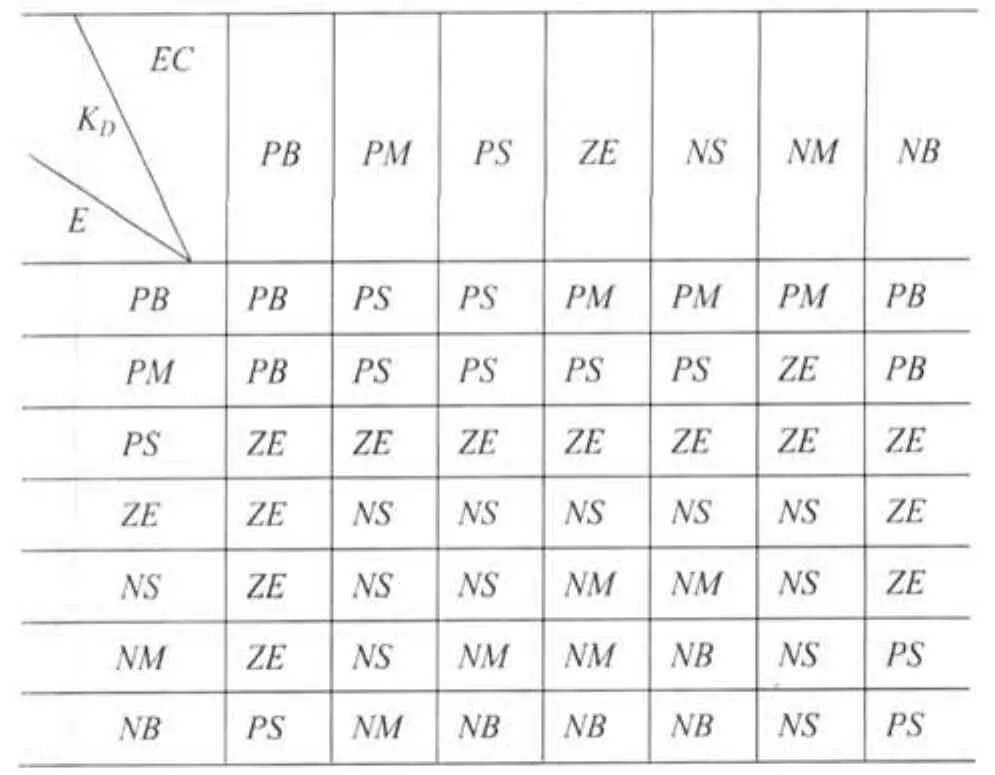
表3 KD调整规则表
3 仿真实验分析
在工业过程中,二阶对象是很普遍的,为了不失一般性,我们取 作为雨刮系统的模型。我们使用与 MATLAB 具有交互编程功能的 Simulink 软件包,仿真结果如图3所示[4],可以看出与PID控制器和常规模糊控制器相比较,参数自整定模糊PID控制器具有调节速度快,超调量小,控制精度高等特点。

图3 系统响应曲线
4 结论
本文仿真实现了一个基于参数自整定模糊PID控制器的汽车雨刮系统,其特点是在常规PID调节器的基础上,应用模糊集合理论建立PID参数、、同误差绝对值、误差变化绝对值之间的调整规则,并根据系统的误差、误差变化率实时整定PID参数的一种模糊控制器。这种控制方法较之常规的固定模糊控制规则的模糊控制方法,对环境变化有较强的自适应能力,可以更好地提高系统的控制性能。
[1] 李学海.PIC单片机[M].北京:北京航空航天大学出版社,2004,236-240.
[2] 廉小亲.模糊控制技术[M].北京:中国电力出版社,2003,32- 52.
[3] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,1995,194-239.
[4] 闻新,周露,李东江.MATLAB模糊逻辑工具箱的分析与应用[M].北京:科学出版社,2001,112-128.
猜你喜欢
电子设计工程(2022年15期)2022-08-17
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
科技创新与应用(2019年17期)2019-06-09
汽车维修技师(2018年8期)2019-01-15
汽车维修技师(2018年3期)2018-08-07
汽车维修技师(2017年5期)2017-10-16
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
汽车实用技术(2015年8期)2015-12-26
