
坐标系转换参数初值快速计算的新方法
2010-11-15 08:43许文学王保丰羊远新
测绘工程 2010年4期
许文学,王保丰,羊远新,李 锋
(1.空军工程设计研究局,北京 100068;2.北京航天飞行控制中心,北京 100094)
坐标系转换参数初值快速计算的新方法
许文学1,王保丰2,羊远新1,李 锋1
(1.空军工程设计研究局,北京 100068;2.北京航天飞行控制中心,北京 100094)
在已知不共线3点在两坐标系下坐标的条件下,提出一种快速计算两坐标系间转换参数概略值的方法。通过已知的3点构造出一个新的坐标系,根据该坐标系可计算出待求的两坐标系分别与它的旋转参数,从而求得待求两坐标系间的旋转参数。再根据旋转参数计算出平移参数的概略值。通过实验验证方法的正确性。
坐标系;公共点转换;平移参数;旋转参数
在测量过程中,通常存在多个坐标系,为了研究被测物的形状、大小、位置、姿态、变形等等,往往需要将测量数据转换到同一坐标系下进行分析,因此,精确求取坐标系间转换参数十分重要。在转换参数求解方法中,公共点转换法是其中较常用的方法。公共点转换法求解转换参数的过程是一个非线性方程线性化迭代求解的过程。计算时需要对转换参数赋初值,转换参数初值的好坏直接影响迭代计算是否收敛,以及计算结果的精度。基于此,本文对公共点转换法转换参数的求解展开研究,提出了一种利用已知不共线的3点在两坐标系下的坐标求解转换参数概略值的方法,试验证明该方法速度快、精度高。
1 原 理
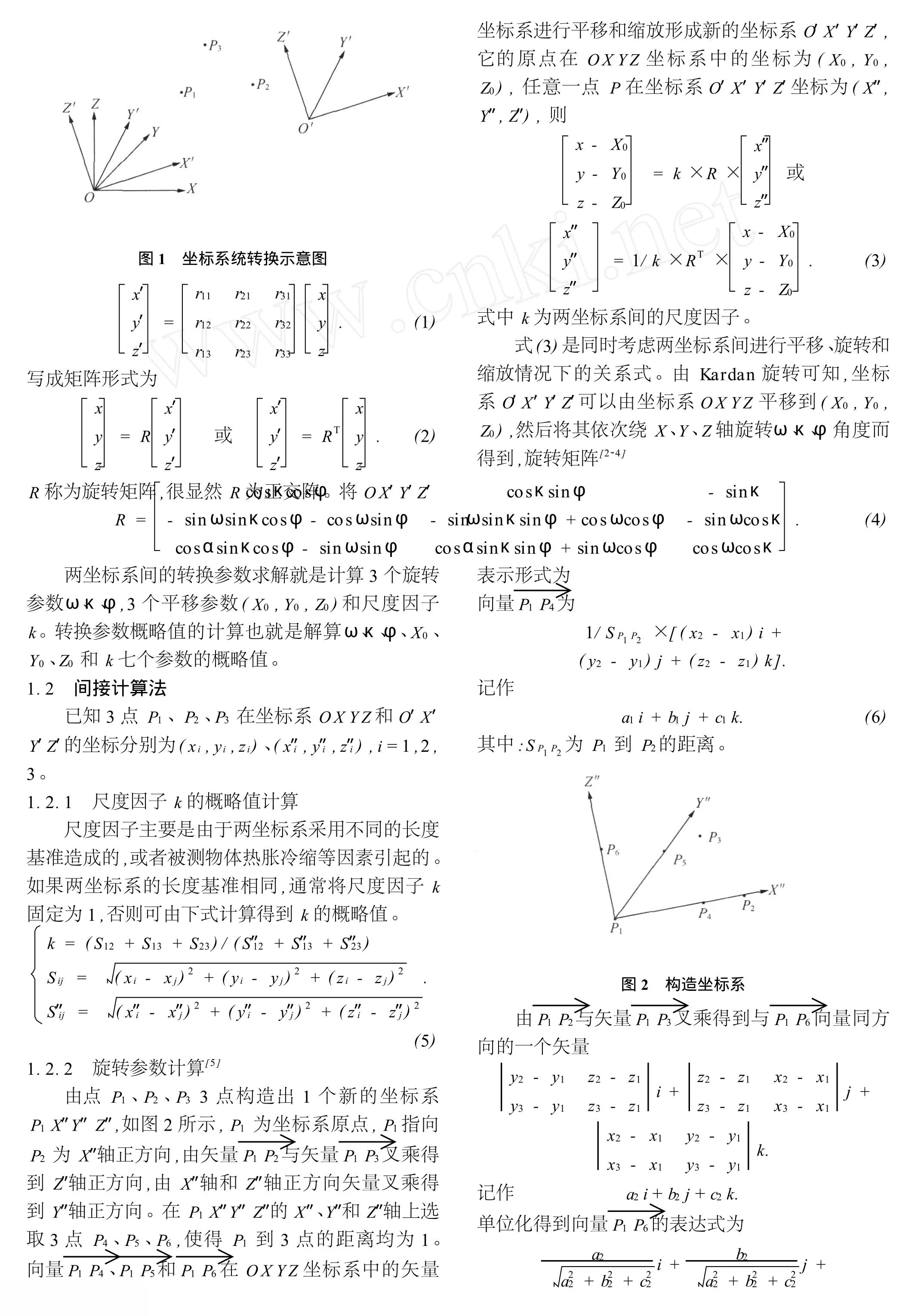
1.1 空间坐标转换
空间坐标转换实际上是通过3个基本旋转、坐标系平移和缩放实现的。如图1所示,OXYZ和OX′Y′Z′为两个坐标原点相同的右手坐标系,任意一点 P在这两个坐标系的坐标分别为(x,y,z)、(x′,y′,z′)。设 X′、Y′、Z′轴在 OXYZ 坐标系中的方向余弦为[1]
显然,X、Y、Z轴在 OX′Y′Z′坐标系中的方向余弦为
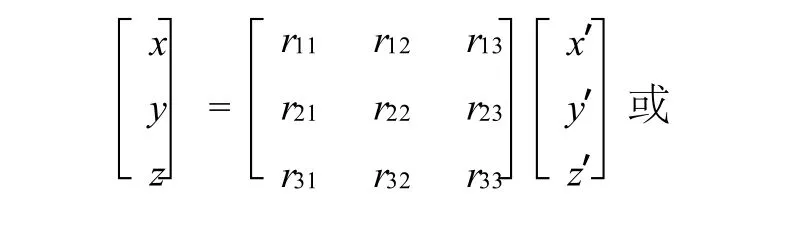
因此,有

2 实 验
为了验证上述算法的正确性,编制了程序并在实验室进行了一组实验。如图3所示,在实验室的控制架上布设了36个标志,利用两台 T3000构成的经纬仪测量系统和V-Stars数字摄影测量系统,分别对控制架上36个点进行了坐标测量,得到了在经纬仪测量系统坐标系和摄影测量坐标系下两组坐标,点位中误差均小于0.1 mm[4,8]。利用 Axyz商用软件对36个点进行公共点转换,尺度因子固定为1,精确计算出两坐标系的转换参数,将其作为真值,结果如表1所示。然后,选取36个点中不共线的3点,共计6组,利用本文所提出的算法对转换参数进行了概算,并与精确计算出的结果进行比较,比较结果如表2所示。

图3 实验示意

表1 转换参数精确值
由表2可以看出,本文所采用方法计算的概略值中平移参数误差小于0.5 mm,旋转参数的概略值与精确值的差值小于0.1°,该方法能够为公共点
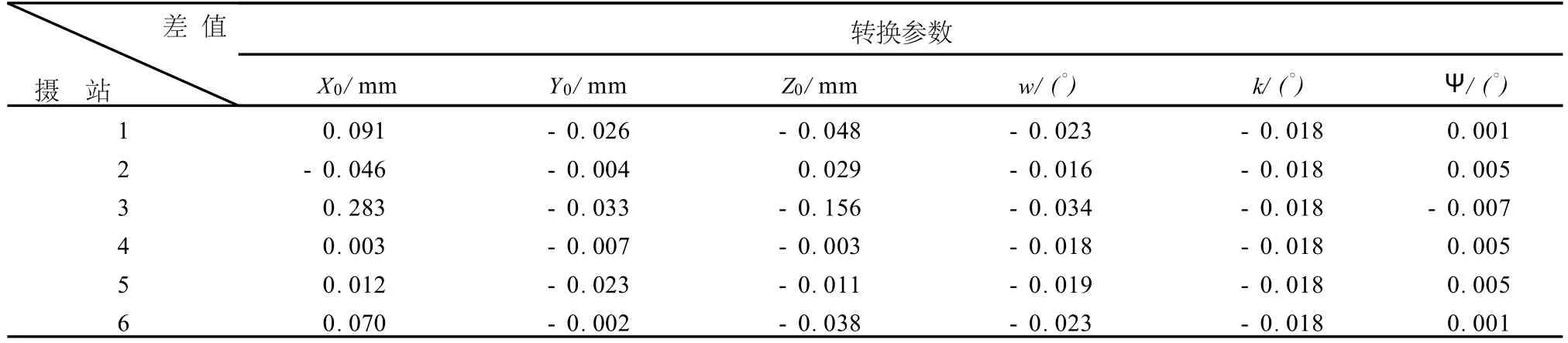
表2 转换参数概略值与精确值的比较结果
3 结 论
本文推导了一种算法来计算两坐标系间转换参数的概略值,该方法只需已知不共线3点的坐标,所需条件简单,易于满足。本文算法具有简单、直观、易理解和初值求解准确、快速等优点,并通过实验验证了该算法的正确性。
[1]李广云.工业测量系统[M].北京:解放军出版社,1994:48-49.
[2]冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002:63-64.
[3]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996:96-97.
[4]王保丰.计算机视觉工业测量系统的建立与标定[D].郑州:信息工程大学,2004:34-35.
[5]肖业伦.航空航天器运动的建模[M].北京:北京航空航天大学出版社,2003:23-24.
[6]王保丰.一种基于物方平面上四点来快速求解相机外方位元素近似值的方法[J].测绘科学技术学报,2006(5):10-11.
[7]孙纪章,陈继华.空间直角坐标转换参数初值的确定[J].军事测绘,2004(4):14-15.
[8]高宏.非正交系坐标测量系统的原理、检定及应用研究[D].郑州:信息工程大学,2003:33-34.
A new arithmetic for the transformation approximation of coordinate systems
XU Wen-xue1,WANGBao-feng2,YANG Yuan-xin1,L Ifeng1
(1.Air Force Engineering Design&Research Institute,Beijing 100068,China;2.Beijing Aerospace Control Center,Beijing 100094,China)
In this paper,onemethod wasproposed to calculate transformation parameter’sapproximation of two coordinate systems under the condition of that three points were offered.Firstly,it constructs one new coordinate system w ith the three points,w hich is used to calculate the rotation parameters between the new and the two know n coordinate systems respectively.We can gain the app roximation of rotation parameters between two know n coordinate system s.Then we can calculate translation parameters between two known coordinate systems by rotation parameters.Finally wemake an experiment to testify the veracity of themethod in the paper.
coo rdinate system;common point transformation;translation parameter;rotation parameter
P22
A
1006-7949(2010)04-0004-04
2009-09-16
许文学(1980-),男,工程师,硕士.
[责任编辑刘文霞]
猜你喜欢
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
新高考·高一数学(2022年3期)2022-04-28
数学物理学报(2022年1期)2022-03-16
中学生数理化·八年级物理人教版(2021年6期)2021-11-22
中等数学(2021年4期)2021-08-14
中学生数理化·高一版(2021年5期)2021-07-21
空间科学学报(2020年1期)2021-01-14
数学年刊A辑(中文版)(2018年2期)2019-01-08
中学课程辅导·教师通讯(2015年14期)2015-09-29
东北师大学报(自然科学版)(2014年1期)2014-02-27
