
激光扫描实验回波信号的分析
2011-01-17 05:15陈金令魏学明邓林明
中国测试 2011年1期
陈金令,宿 丁,魏学明,邓林明,缪 康
(1.四川长虹电子科技有限公司,四川 绵阳 621000;2.西南电子设备研究所,四川 成都 610036)
激光扫描实验回波信号的分析
陈金令1,宿 丁2,魏学明1,邓林明1,缪 康1
(1.四川长虹电子科技有限公司,四川 绵阳 621000;2.西南电子设备研究所,四川 成都 610036)
利用激光回波信号的强度变化来测量物体边缘轮廓的新型激光雷达,并利用二维扫描、直接探测等技术建立了一套激光扫描实验系统。振镜在X、Y方向分别以不同的频率振动,当激光经过振镜反射后,就以X、Y方向进行二维扫描,激光二极管接收到的信号经过滤波后被分为两个不同频率的信号,分析这两个不同频率的信号,就可以得到物体的轮廓信息。实验测量表明,通过测量回波强度变化来测量物体边缘轮廓的方案是可行的。
激光雷达;二维扫描;直接探测;回波信号;边缘检测
1 引言
在过去的20多年间,激光雷达得到了长足的发展,在军事、航空航天、工业和医学等领域有广泛的应用。激光雷达可分为成像激光雷达和非成像激光雷达。非成像激光雷达与成像激光雷达相比,研究的费用和难度大大低于成像激光雷达。对于非成像雷达,提出了一种新的工作方式,即使用光电二极管(PIN)来探测从目标返回的能量,根据反射回来的激光能量的变化来获取目标的轮廓信息,根据目标的边缘信息来进行跟踪和识别[1-3]。
2 试验原理
利用激光对目标进行扫描,激光回波信号包含被扫描目标的边缘、轮廓信息,这些信息很大程度反映在回波包络形状上。可以理解为目标的边缘、轮廓信息对激光束进行了幅度调制,反射回来的激光就携带了目标的边缘、轮廓信息[4-6]。采用边缘检出法可以得到信号的边缘信息。
控制光束扫描的方法有很多种,可分为机械扫描和非机械扫描。机械扫描大致包括摆动平面镜扫描、旋转平面镜扫描、旋转折射棱镜扫描等[7-9]。实验系统采用的是二维振镜扫描方式,扫描器的X、Y两个振镜分别通过计算机程序设置的驱动函数进行振动,经过合成,就可以将扫描图形送向目标。在实验中,X、Y两个振镜的驱动函数都设置为正弦波函数,扫描光束的直径达10mm,振镜X轴的扫描频率为10Hz的正弦波,Y轴的扫描频率为100Hz的正弦波。
实验的另一个关键技术是信号的探测问题。在直接探测中,其光电系统直接响应光辐射的强度,不涉及光辐射的相干性,它将待测光信号直接入射到光探测器的光敏面上,探测器响应光辐射的强度而输出相应的光电流或光电压信号。综合考虑各种限制因素的影响,采用了光电二极管(PIN)直接探测的方式。PIN是高灵敏响应器件,借助于示波器对目标的回波信号进行观察,先通过调整接收透镜和探测器的位置,使探测器在透镜的焦平面上,然后调整探测器和透镜的俯仰角度,使目标调整到探测器的光敏面上,当示波器上出现的信号达到最强而又不饱和时,这时系统的扫描位置和信号接收就确定下来。
试验系统包括光源、光电探测器(PIN)、信号处理系统、数据处理软件和显示器等5部分组成。试验系统采用连续波激光器、二维扫描、直接探测、计算机显示的工作方式。振镜由计算机控制,提供X、Y方向的正弦摆动,激光器发出连续激光,然后经过二维光束扫描系统(振镜)指向目标,从目标反射的回波信号经过透镜聚焦后由高灵敏度的光电二极管(PIN)接收,信号光经过光电转换后,送至高速数据采集卡,可以利用示波器进行观察或者直接送入计算机进行信号的处理。图1是试验系统结构简图,光束扫描系统是激光扫描系统中不可缺少的一部分,试验采用正弦扫描方式以满足激光扫描系统的要求。扫描系统的振镜分别通过计算机程序设置的驱动函数进行振动,经过合成,就可以将扫描图形送向目标。振镜X轴的摆动频率为10Hz,Y轴的摆动频率为100Hz。X、Y方向扫描初始相位相同,均为正方向扫描。即X方向一个扫描周期内Y方向扫描了10个周期。

图1 试验系统结构简图
3 试验结果分析
激光器发出连续激光,经扩束后由二维光学扫描系统(振镜)指向目标,从目标反射回的回波信号由高灵敏度的光电二极管(PIN)探测,PIN的输出由高速数据采集卡送入计算机处理[10]。

图3 扫描圆锥物体得到的波形
激光器光源是中心波长为650 nm的可见光半导体激光器,运行机制为连续方式,功率约15mW。光束扫描系统是激光扫描系统中不可缺少的一部分,实验采用正弦扫描方式以满足激光扫描系统的要求。振镜X轴的摆动频率为10Hz,Y轴的摆动频率为100Hz。
接收系统包括透镜、二极管探测器、高速数据采集卡等。接收透镜的直径为8 cm、焦距为30 cm。探测器采用国产GT101硅光电二极管(PIN),光敏面直径为3mm。数据采集卡采用瑞博华公司的AD7301,采样精度为12位,单端方式16通道,采集实际贯通率为50KS/s通道。利用Visual Basic6.0编制了信号采集软件。该数据采集软件可以实现数据采集、实时波形、数据存储等功能。采样频率设定为5 000Hz。示波器用来观察目标回波信号,实验中的数据主要是依据回波信号的强弱及峰值关系来处理的。
3.1 扫描圆锥物体试验分析
圆锥物体放置方式如图2,振镜以X轴10Hz,Y轴100Hz进行正弦摆动,扫描圆锥物体得到的回波信号如图3所示。对圆锥信号进行滤波后,可得到10Hz和100Hz的信号,滤波后的信号存在一定的延迟,其中经过滤波后得到的100Hz信号如图4所示。
将100Hz信号进行解调,得到解调后的波形如图5所示,可以清楚地看出,经过解调后的信号很好地反映了100Hz信号的包络。

图2 光束扫描圆锥物体方式示意图
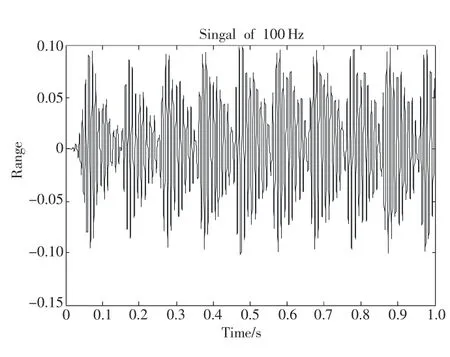
图4 经过滤波得到的100Hz信号
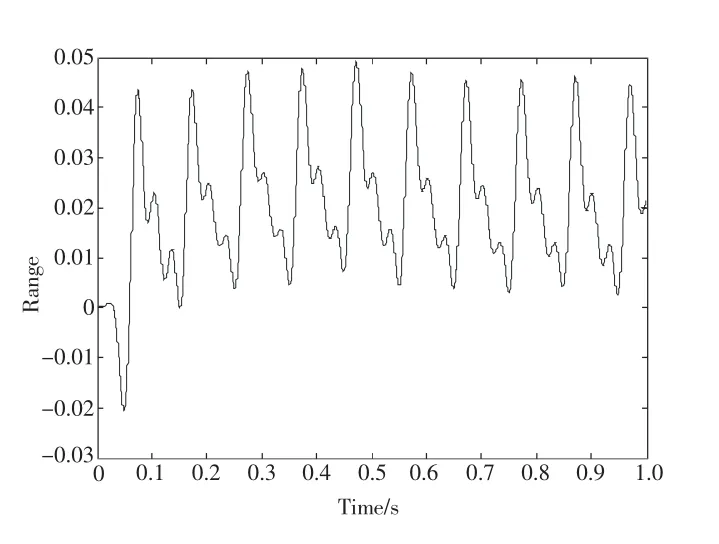
图5 100Hz信号解调后的波形
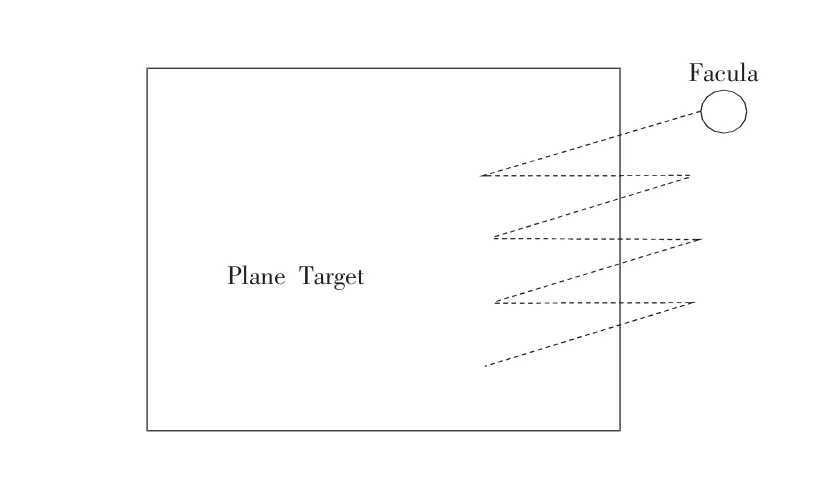
图6 光束扫描平面物体方式示意图
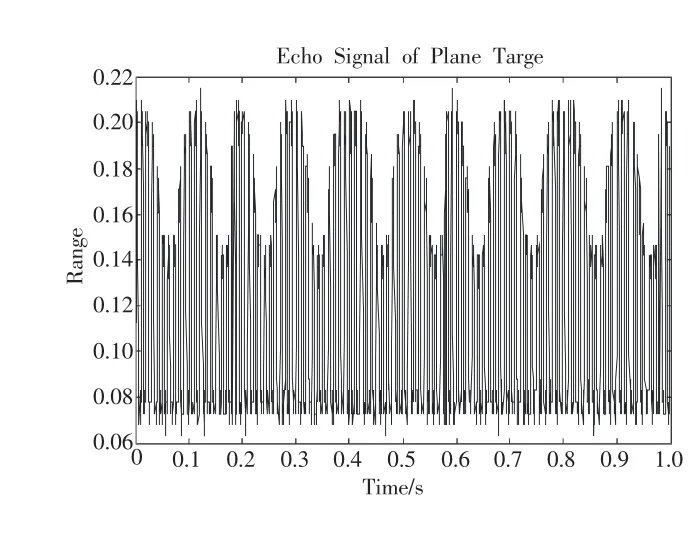
图7 扫描平面物体物体得到的波形
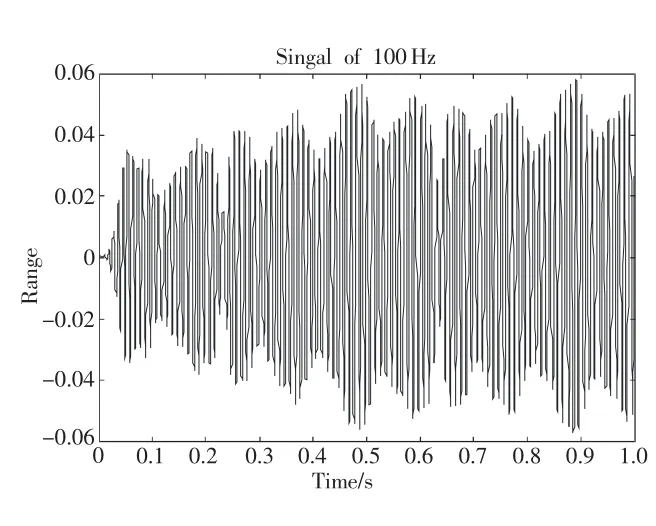
图8 经过滤波得到的100Hz信号
边缘检出主要有峰(谷)值、过零和激光半焦斑3种方法,下面将采用峰(谷)值检出法进行边缘检测。峰(谷)值检出法也称一次微分法,它是通过对探测器接收光强进行微分来判断光强的峰值点或谷值点的方法。过零检出法也称二次微分法,即对接收到的信号进行二次微分,得到一个过零点,用它来检测目标的边缘位置。过零检出法实质是将边缘定位点由峰顶或者谷底移到零点,出现突变零点的位置对应的就是边缘位置[11-12]。试验主要利用峰(谷)值检出法来得到边缘信息。利用峰(谷)值检出法对包络图5进行处理,可以得到物体的边缘位置信息,每一个波峰和波谷位置对应的即为目标的边缘位置。
3.2 扫描平面物体试验分析
扫描平面物体得到的回波信号,平面物体放置方式如图6,首先X轴以10Hz进行正弦摆动,Y轴以100Hz进行正弦摆动,所得到的回波信号如图7所示。

图9 100Hz信号解调后的波形
对平面信号进行滤波后,可得到10Hz和100Hz的信号,将100Hz信号进行解调,得到解调后的波形如图8所示,可以清楚地看出,信号存在一定的延迟,如图9所示。图9可以看出,经过解调后的信号比较好地反映了100Hz信号的包络,但是解调后的信号存在一个向上的变化趋势,经分析主要原因在于100Hz信号的滤波效果不是很好,所以才出现上面的情况。
利用峰(谷)值检出法对包络图9进行处理,可以得到物体的边缘位置信息,每一个波峰和波谷位置对应的即为目标的边缘位置。
4 结束语
该文提出了一种利用激光回波信号的强度测量物体边缘轮廓的方法,并利用它测量了圆锥、平面等物体,根据返回信号强度的变化来测量物体的边缘。结果表明,通过探测激光回波能量的变化来测量目标的边缘,进而进行目标识别、跟踪是可行的。
[1]Peter M,Livingston,Estates PV.Laser crossbody tracking system andmethod[P].United StatesPatent:5780838,1998.
[2]熊辉丰.激光雷达[M].北京:宇航出版社,1994:285.
[3]Teich M C.Homodyne detection of infrared radiation from moving diffuse target[J].Proc.IEEE,1969,57(5):786-792.
[4]Daugherty J,Hyman H.Rapid optical beam steering sensor suite for tactical weapon tracking applications[J].Proc. SPIE,Laser Beam Propagation and Control,1994,2120:211-217.
[5]张 辉,王涌天.激光目标探测装置的回波特性及目标识别技术研究[J].光子学报,2005,34(1):22-24.
[6]Meyzonnette J L,Remy B,Saccomani G,et al.Imaging CO2laser radar with chirp pulse compression[J].Proc.SPIE,Laser Radar II,1987,783:169-179.
[7]成向阳,李 宁,王海虹,等.半导体激光快速扫描雷达成像实验[J].中国激光,2001(7):658-660.
[8]吕海宝,湛廷政,周卫红,等.柱边边缘扫描检出模型的研究[J].激光杂志,1998,19(5):14-17.
[9]吕海宝,杨华通.激光半焦斑边缘检出法测径系统[J].基础自动化,2000,7(4):55-58.
[10]苗永平,刘永智.激光二维扫描显示技术的研究[J].光学与光电技术,2004,2(1):50-53.
[11]刘毅敏.基于Matlab的调制解调器的设计[J].现代计算机,2005(7):95-97.
[12]朱 静,徐 军.用Matlab对双边带抑制载波调制解调器的仿真分析[J].湖南城建高等专科学校学报,2002,11(1):36-37.
Analysis for signal of the Laser rapid scanning experiments
CHEN Jin-ling1,SU Ding2,WEI Xue-ming1,DENG Lin-ming1,MIAO Kang1
(1.Changhong Electric Co.Ltd.,Mianyang 621000,China;2.Southwest Institute of Electronic Equipment,Chengdu 610036,China)
This paper presented a new laser radar that measures the profile of the target by detecting the change of returned laser energy.With 2-D scanning and direct detection technology,a rapid-scanning laser system was established.The system steers a mirror to oscillate in X and Y direction at different frequency,so the laser beam dither in two directions and scan the surface of target.The energy of the laser reflected from the target was detected by PIN.After filtration,the detected energy could be separated to the first and second dither frequency for each channel,thus the profile message of the target can be obtained.The experimental results prove that the proposed approach is effective for profile detection of the target.
laser radar;2-D scanning;direct detection;echo signal;edge detection
TN24;TM930.12
A
1674-5124(2011)01-0063-03
2009-12-28;
2010-03-09
陈金令(1975-),男,河南平顶山市人,高级工程师,博士,主要从事信号处理方面的研究。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
中国交通信息化(2019年1期)2019-03-26
小学科学(2019年12期)2019-01-06
电子制作(2018年16期)2018-09-26
通信产业报(2016年44期)2017-03-13
太空探索(2014年9期)2014-07-10
雕塑(1999年2期)1999-06-28
