三相PWM整流器直接功率控制研究
2011-07-20 03:59王新平李世民赵志草
微特电机 2011年12期
王新平,李世民,赵志草
(1.西北工业大学,陕西西安710072;2.陆军航空兵学院,北京101123;3.中国人民解放军61213部队,山西临汾041000)
0 引 言
PWM整流控制策略有多种,现行以直接电流、间接电流控制为主,这两种闭环控制需要复杂的算法和调制模块。而直接功率控制因具有控制方法简单、抗干扰能力强、动态性能良好、可实现有功无功解耦控制等诸多优点,近年来得到了广泛研究,其控制方法也层出不穷[1]。
直接功率控制是以直流电压为外环、瞬时功率控制为内环的双闭环系统。传统的控制策略是电压外环采用PI控制器得到有功给定,功率内环采用滞环比较器,迫使实际有功跟上给定。针对传统直接功率控制开关频率不定,采样频率高,以及电压外环采用PI调节器系统抗扰动能力较差,对PI控制参数较为敏感,网侧电流总谐波含量较大等缺点,本文采用滑模变结构直接功率控制策略,即:电压外环采用滑模变结构控制,功率内环采用基于虚拟磁链的空间矢量调制直接功率控制,完成对三相PWM整流器的控制。
1 直接功率控制原理
三相PWM整流器[2]是通过对三相桥开关管的导通与关断进行控制,从而控制整流器输入相电压,进而对网侧电流ia、ib、ic进行控制。在直接功率控制中,通过对三相VSR瞬时有功功率和瞬时无功功率的控制来达到对系统输入电流和输出电压的控制,下面就其工作原理给予说明。
在两相旋转坐标系中,假设电网电压矢量和两相旋转坐标系中的d轴重合,则此时uq=0。同样,设d轴初始位置和α轴重合,电流矢量和d轴夹角为φ,则得到瞬时有功功率和瞬时无功功率[3]:

式中:ud、uq为整流器终端输入电压;id、iq为三相VSR交流侧电流矢量的d、q轴分量。
电网电压矢量在d轴进行投影,其值为常数,可以实现id对P的控制,且id与P成正比关系;同理,可以实现iq对Q的控制,且iq与Q为反比关系。这就是三相电流ia、ib、ic开关状态选择的依据。
若忽略滤波电抗器电阻R,应用基尔霍夫电压定律,得到三相VSR在两相同步旋转坐标系中的模型电压平衡方程式:
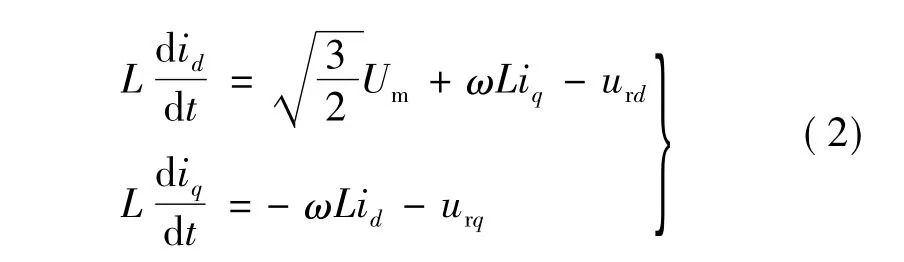
式中:Um为相电压峰值,urd、urq为三相VSR交流侧电压矢量的d、q轴分量。
由式(2)可知,瞬时电流id、iq受VSR交流侧控制电压urd、urq的控制,结合式(1),有功功率和无功功率可由 urd、urq控制。
设电源为三相对称的正弦波,pref为有功功率参考值,qref为无功功率参考值,则可得[2]:

由式(3)知,在一定电网电压下,对有功功率和无功功率两个量的控制可实现对三相电流的控制。

在两相旋转坐标系中,电网电压矢量在d轴的投影为一个常数。根据参考文献[4],瞬时功率:

根据式(5),式(4)可变形:

由式(6)可以看出,保持电网输入电压不变,VSR的控制对象[4]由输入电流转换为输入功率,这就是三相VSR中直接功率控制的基本原理。
2 滑模变结构矢量调制直接功率控制策略
常规的直接功率控制时,当需要调整有功功率P时,电压矢量总是从所在区间相邻的电压矢量选择,这样导致电压矢量在q轴上的投影值很小,致使无功功率在这个电压矢量区域内发生失控,同时电流波形也会存在一定的畸变。空间电压矢量[6-7],可以产生任何方向的电压矢量,从当前网侧电压矢量的相位考虑,计算出一个至少和它有一定角度差的电压矢量,这个电压矢量在q轴上的投影有一定大小,从而完成对无功功率的控制,同时也可满足控制有功功率的要求。原理框图如图1所示。

图1 滑模变结构DPC-SVM控制系统框图
由图1可以看出,直接功率控制应用虚拟磁链(VF),只要进行两相电流信号的测量,而不用进行电压信号的测量,减少了传感器的数量。运用功率内环和电压外环的双层结构控制,空间矢量调制模块实现开关频率固定。使无功功率指令qref设置为零,从而实现单位功率因数运行,有功功率指令值pref则由外环滑模控制器输出得到,qref和pref作为输入信号,分别与功率估计器输出的Q和P值比较产生偏差信号,进入PI控制器,再经过坐标变换得到电压信号 urα和 urβ,最后送入空间矢量调制模块(SVM)进行处理,获得开关信号 sa、sb、sc。
3 滑模变结构矢量调制直接功率控制仿真模型
根据图1建立起控制系统整个仿真模型[8]如图2所示。图中的SMC模块是滑模控制器单元,根据滑模面[9]选取方法建立其仿真模型如图3所示。
4 仿真结果
在图2的仿真模型中,设定仿真参数如下:输入电压ua、ub、uc幅值为 50 V,正弦交流电周期为0.001 s;输入侧等效电阻 R1=R2=R3=0.001 Ω;输入电感L1=L2=L3=20 μH;直流侧电容C=1 200 μF;负载电阻 R=1.35 Ω,开关周期 T=0.02 ms。仿真时间设为0.5 s,仿真算法采用ode45(Dormand-Prince),k2取200。
(1)仿真结果分析
图4是直流侧电压波形。从波形知,系统的输出为90 V,调节时间约为0.002 s,无超调。

图2 滑模变结构DPC-SVM控制系统仿真模型

图3 SMC模块
图5为交流侧a相电压、电流波形,从图中可看出,输入电流为正弦波,经过5个电源周期后电流完全跟随电压,相位与输入电压一致。
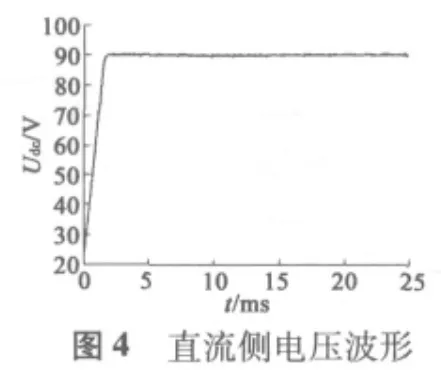

图6为0~0.5s时间内整流器无功功率的变化情况。由图6可以看到,基于滑模变结构空间矢量调制直接功率控制的三相电压型PWM整流器的功率因数接近1。
(2)抗扰性分析
若在 0.2 s时负载由 1.35 Ω 降为 0.9 Ω,直流侧输出电压的响应情况如图7所示。由图7可知,直流电压有一个小的降落,约0.002 s后又回到90 V。
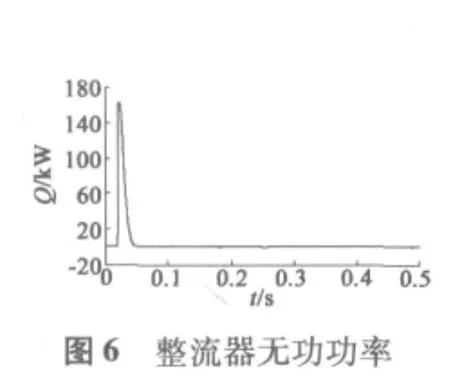

图8为负载变化前后交流侧a相的电压和电流波形。由该图可以较为清晰地看到,在负载突变时,电压与电流之间同相位的情况几乎没有发生改变。
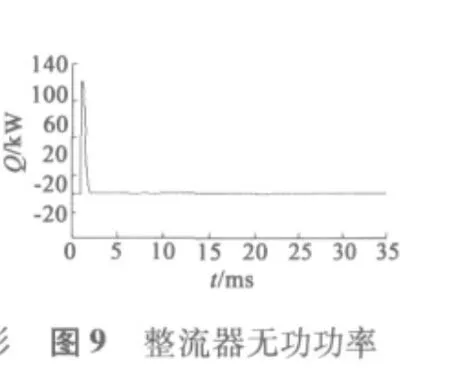
图9为负载变化前后整流器无功功率的变化情况。无功功率在负载变化后经过约0.01 s后恢复到变化前的值,整流器的功率因数接近于1。

5 结 语
本文采用了滑模变结构空间矢量调制直接功率控制策略,即:电压外环采用滑模变结构控制,功率内环采用虚拟磁链矢量调制直接功率控制。该控制策略开关频率固定,方便网侧电感参数的选取;降低了采样频率;可获得任意方向电压矢量,不存在无功失调区;具有更好的动态品质、鲁棒性以及更小的谐波含量;同时电压外环参数整定简单,设计方便。
[1] 张崇巍,张兴.PWM整流器及其控制技术[M].北京:机械工业出版社,2003.
[2] 接峰.三相PWM整流器及其控制[D].杭州:浙江大学,2006.
[3] 罗永.风力发电并网变流器直接功率控制[D].北京:北京交通大学,2008.
[4] 董金宝.永磁同步风力发电系统PWM整流技术研究[D].西安:西北工业大学,2010.
[5] 陈伟.三相电压型PWM整流器的直接功率控制技术研究与实现[D].华中科技大学,2009.
[6] 赵葵银,杨青,唐勇奇.无交流电压传感器的PWM整流器的直接功率控制[J].电力电子技术,2007,41(7):6 -9.
[7] 汪万伟,尹华杰,管霖.三相电压型PWM整流器滑模变结构直接功率控制[J].华南理工大学学报,2009,37(11):83 -87.
[8] 张之勇编著.精通MATLAB6.5版[M].北京:北京航空航天大学出版社,2008.
[9] Silva J F.Sliding-Mode Control of Boost-Type Unity-power-Factor PWM Rectifiers[J].IEEE Transactions on Industrial Electronics,1999,46(3):594-603.
猜你喜欢
园林科技(2021年2期)2022-01-19
科学家(2021年24期)2021-04-25
石油沥青(2021年1期)2021-01-11
自动化学报(2019年12期)2020-01-19
中医眼耳鼻喉杂志(2019年2期)2019-04-13
中国惯性技术学报(2019年6期)2019-03-04
筑路机械与施工机械化(2018年1期)2018-03-06
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年19期)2017-02-02
北京航空航天大学学报(2016年7期)2016-11-16