
容错联邦强跟踪卡尔曼滤波算法在组合导航中的应用研究*
2011-12-12 01:42马云峰
潍坊学院学报 2011年6期
马云峰
(潍坊学院,山东 潍坊 261061)
容错联邦强跟踪卡尔曼滤波算法在组合导航中的应用研究*
马云峰
(潍坊学院,山东 潍坊 261061)
提出了一种改进的联邦强跟踪卡尔曼滤波算法,并将其应用于MSINS/GPS浅组合中。采用了三层容错结构,能够有效地检测出数据粗大误差、GPS速度跳变以及滤波器误差估计的故障,及时进行故障隔离,从而使系统具有良好的容错能力。仿真结果表明,联邦强跟踪卡尔曼滤波算法解决了量测相关、GPS速度跳变和初值选取敏感性等问题,可以提高系统的实时性、鲁棒性和容错性能。
捷联惯性导航系统;全球定位系统;组合导航系统;卡尔曼滤波;强跟踪;联邦滤波;容错
1 引言
Kalman滤波技术已经广泛地应用于组合导航系统中,但在MSINS/GPS浅组合中采用经典的集中式卡尔曼滤波器还存在着滤波的实时性、滤波稳定性、GPS速度跳变等问题。
1988年Carlson提出了用于容错系统的联邦卡尔曼滤波器信息融合算法,由于联邦滤波器设计灵活、计算量小、容错性能好而备受重视[1-2],这种算法的特点是采用不同的信息分配策略可以获得不同容错性能的组合导航系统,这种化整为零的估计方法十分适合于多导航数据处理器进行并行计算,从而提高整个系统的实时性。考虑到GPS输出的位置和速度测量值是相关的,而且GPS的速度有时会发生突跳,若采用集中式卡尔曼滤波器极易造成滤波发散。为解决量测相关并提高系统的容错性,在MSINS/GPS浅组合应用中设计一种联邦容错强跟踪卡尔曼滤波器,采用有反馈的融合结构,实现对导航误差的滤波估计,并能对故障进行隔离和系统重构。
2 联邦强跟踪卡尔曼滤波器的设计
滤波器结构如图1所示。该方案采用两个并行的强跟踪卡尔曼子滤波器,分别对位置和速度进行估计,然后通过一个主滤波器融合各子滤波器的状态估计,子滤波器的更新周期和主滤波器的融合周期均为1s;采用了三层故障检测实现容错设计,提高组合导航系统的故障隔离和重构的能力。

图1 联邦强跟踪卡尔曼滤波器的结构
2.1 位置子滤波器
位置子滤波器的状态变量包括MSINS导航计算参数误差、陀螺仪测量误差和加速度计测量误差。状态变量X1(t)为

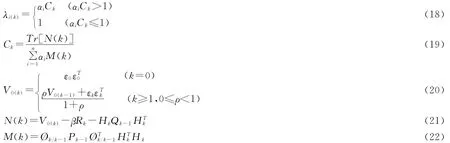
MSINS/GPS浅组合的位置子滤波器状态方程与纯惯导系统的状态方程形式相同[3],即为

位置子滤波器的观测方程为

式中,

式中,Pge、Pgn、Pgu为GPS接收机沿东北天方向的位置误差。
2.2 速度子滤波器
速度子滤波器与位置子滤波器的状态变量相同,设为X2(t)

速度子滤波器状态方程与纯惯导系统的状态方程形式也相同,即为

速度子滤波器的量测方程Zv(t)为

式中,

式中,Vge、Vgn、Vgu为GPS接收机沿东北天方向的速度误差。
2.3 主滤波器及信息分配
设主滤波器的状态估计为^Xf,估计误差方差阵为Pf;位置、速度子滤波器的状态估计分别为^X1、^X2,相应的估计误差方差阵为P1、P2。系统信息P-1f、Q-1f由两个子滤波器共同分享,主滤波器中不分配信息(β1+β2=1,βm=0),只执行各子滤波器的数据融合。
(1)假定初始时刻全局状态估计为^Xf0,其协方差阵为Pf0,系统噪声的协方差矩阵为Qf0。根据信息守恒原理,把这些信息通过信息分配因子β1、β2分配到各子滤波器。

系统噪声信息按照同样的信息分配原则分配到各子滤波器。

信息分配策略采用文献[4]中的方法,根据局部滤波器的估计精度因子来选定。取β1+β2=1,βm=0,系统信息全部保留在子滤波器中。

式中,

式中,β1i、β2i称为局部滤波器的估计精度因子;分别代表P1,P2的第i行第i列的元素。
(2)各子滤波器与主滤波器进行时间修正[5]

式中,
(3)各子滤波器进行量测修正

(4)主滤波器进行数据融合
把各子滤波器得到的状态估计^X1(k)、^X2(k)及其协方差P1(k)、P2(k)进行融合。因Carlson联邦滤波采用了信息分配原理,子滤波器的结果之间相互独立,主滤波器的数据融合算法为

2.4 系统的三层容错设计
实际测试表明,GPS接收机有时会给出错误的位置、速度数据。因此,如果在GPS数据进入卡尔曼滤波器之前,不将错误的GPS数据剔除,则经反馈校正后,便污染了整个系统。为此,系统进行了三层容错设计,即数据粗大误差的剔除与隔离、子滤波器误差估计值的故障检测、主滤波器误差估计值的故障检测。
(1)速度数据粗大误差判断
若根据式(27)计算出的V1大于10 m/s(假设GPS速度最大跳变为5m/s),则GPS受到干扰,速度出现突变,上标E、N、U表示东、北、天方向。

(2)子滤波器的故障检测
对于各子滤波器,前后两次的误差估值不应发生非常大的突变。如果有大的突变,则认为卡尔曼滤波器已受到第一层未检测出的故障所污染,其滤波结果不送到主滤波器,并重新初始化该子滤波器。采用残差χ2检验法[6]进行子滤波器误差估计值的故障检测。
(3)主滤波器的故障检测
对于主滤波器,同样前后两次的误差估值不应发生非常大的突变。如果有大的突变,则认为主滤波器已受到前两层未检测出的故障所污染,本次融合结果不再反馈到各子滤波器,并且不对MSINS进行反馈校正。同样采用状态χ2检验法进行主滤波器误差估计值的故障检测。
3 滤波算法在MSINS/GPS浅组合中的应用仿真
3.1 仿真轨迹及仿真条件的设置
设仿真轨迹由平飞、转弯、加速、爬升等状态组成,仿真轨迹中的载体先在高度为1000米的高空上由东北方向匀速飞行,接着加速飞行,然后拐弯向正东方向匀速飞行,最后爬升到一定高度匀速飞行。
仿真条件:系统噪声Qk是由陀螺仪和加速度计敏感误差的白噪声部分构成的。给定陀螺仪和加速度计的参数为:光纤陀螺仪常值漂移10°/h,随机噪声均方差为10°/h;石英挠性加速度计常值误差0.5mg,随机误差均方差为0.1mg,GPS的位置误差为均方差15m的白噪声,速度误差为均方差0.1m/s的白噪声,两个滤波器的状态初始值均为0。当300秒至400秒期间,GPS东向速度发生±4m/s的跳变。
3.2 仿真结果
有东向速度故障情况下的集中卡尔曼滤波估计误差曲线和联邦强跟踪卡尔曼滤波器的滤波误差曲线如图2和图3所示。

图2 有速度跳变故障时集中式卡尔曼滤波误差曲线
4 结论
(1)在正常情况下,联邦强跟踪卡尔曼滤波器的滤波精度与集中式卡尔曼滤波器的滤波精度相当。
(2)集中式卡尔曼滤波器对初值的选取较敏感,若初值的选取与实际相差较大,将导致滤波器的发散,而联邦强跟踪卡尔曼滤波器对初值选取敏感度较低。
(3)当GPS速度发生跳变故障后,集中式滤波器立即发散。这说明,在有故障发生时,集中式卡尔曼滤波器易受污染。

图3 有速度跳变故障时联邦强跟踪卡尔曼滤波误差曲线
(4)联邦强跟踪卡尔曼滤波器在速度发生跳变故障时,能够根据检验结果迅速将速度子滤波器隔离,主滤波器拒绝接纳该子滤波器的信息,仅接纳并输出位置子滤波器的信息。从图3中看出,在300s-400s之间联邦滤波器滤波精度降为单独位置子滤波器估计的效果;当子滤波器速度跳变消失后,又可及时重新加入信息融合,联邦滤波器估计滤波精度恢复至故障前。
(5)当系统噪声统计特性未知、初始值选择不当或GPS速度产生跳变时,与集中式Kalman滤波器相比,联邦强跟踪卡尔曼滤波器具有很强的鲁棒性和容错性,而且具有较高的精度。
[1]Carlson N A.Federated square root filter for decentralized parallel processes[J].IEEE Trans:Aerospace and Electronic Systems,1990,26(3):517-525.
[2]Carlson N A.Federated kalman filter simulation results[J].Navigation,1994,41(3):297-321.
[3]袁信,俞济祥,陈哲.导航系统[M].北京:北京航空工业出版社,1992.
[4]周哲.多传感器信息融合及其在组合导航系统中的应用[D].哈尔滨:哈尔滨工业大学,2000.
[5]付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.
[6]陶俊勇.组合导航系统信息融合理论及故障检测与诊断技术研究[D].长沙:国防科技大学,2000.
(责任编辑:肖恩忠)
Application of Fault Tolerant Federated Strong Tracking Kalman Algorithm in Integrated Navigation System
MA Yun-feng
(Weifang University,Weifang 261061,China)
An improved federated strong tracking kalman filter has been proposed creatively and has been used in loose coupling MSINS/GPS integrated navigation system.Adopting three-layer fault-tolerant structure,it can effectively check the errors of data outlier,GPS's velocity jump and the malfunction of the filter state estimate.When the system fault has been diagnosed,it can be insulated in time,which can make this system have better ability of toleranting the faults.The simulation results show that this approach can resolve the problem of the correlation of GPS's position and velocity measurement data,GPS's velocity jump and the system's sensitivity to initial values.Thus,the real time character,robust and the ability of tolerating faults of the system has been improved.
strapdown inertial navigation system(SINS),global position system(GPS),integrated navigation system,kalman filter,strong tracking,federated filter,fault tolerant.
2011-05-18
山东省自然科学基金项目(Y2007G64)
马云峰(1967-),男,山东临朐人,潍坊学院信息与控制工程学院教授,工学博士。研究方向:组合导航技术。
V249.32 文献标识码:A 文章编号:1671-4288(2011)06-0110-06
猜你喜欢
家庭影院技术(2020年10期)2020-12-14
家庭影院技术(2019年7期)2019-08-27
能源(2018年8期)2018-09-21
北京航空航天大学学报(2017年9期)2017-12-18
电气化铁道(2016年5期)2016-04-16
工业设计(2016年10期)2016-04-16
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
太阳能(2015年6期)2015-02-28
电子设计工程(2014年6期)2014-02-27
