
一种Sobel黑片图像亚像素边缘检测
2012-04-26 03:22黄德斌
沈阳理工大学学报 2012年3期
黄德斌,王 琰
(沈阳理工大学信息科学与工程学院,辽宁沈阳 110159)
边缘检测技术常用在机器视觉中对物体的边缘进行定位。通过软件方法提高亚像素边缘定位的精度比通过硬件方法需要的成本低,使得软件亚像素边缘提取算法得到了广泛的研究和应用。黑片是制作变压器的一种材料,其平面几何参数的精确度对变压器的性能有重大影响。机器视觉技术可以更精确地检验产品精度,满足工业高精度要求。对黑片边缘的亚像素检测[1],一般都是在经典算法处理基础上再做处理得到亚像素精确边缘。常用的方法有插值法、拟合法、几何矩方法等。本文采用多项式插值法[2],首先用经典的Sobel算子[3]得到像素级的边缘,然后再细化得到单像素的边缘,在单像素边缘的基础上,结合原梯度图像进行方向插值,得到亚像素的黑片边缘。算法的边缘定位精度最高可达个像素。
1 单像素边缘检测
1.1 经典Sobel边缘检测
通过横竖两个方向模板检测横竖方向上的边缘。模板如下:
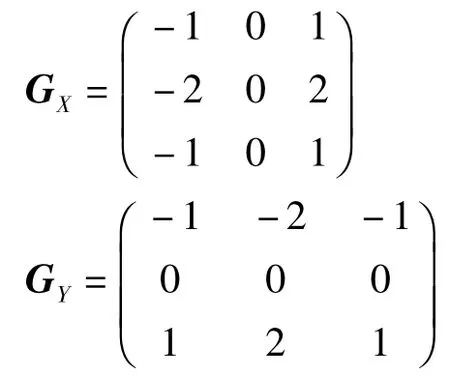
Sobel边缘检测算子的表达式为

适当选取阈值 t,如果 g(i,j)> t,则认为(xi,yj)为边缘点,这样可以粗略地找出可能的边缘点并标记。
经典的Sobel算子具有检测定位速度快,并且可以粗略地检测出边缘,为下一步的亚像素边缘检测做好准备。
1.2 Sobel边缘检测算法的改进
本文在原Sobel边缘检测算法横竖两个模板的基础上增加了两个对角线上的模板。原Sobel模板在梯度方向为水平和垂直时的边缘检测效果较好,而没有考虑和水平及垂直方向成45°方向的梯度边缘。本文增加的两个斜对角模板,考虑了45°方向上的梯度边缘。本文模板如下:


检测的结果表达式为

本文算法在得到的梯度数值矩阵上乘以权值系数0.5(乘以权值系数的目的是把梯度矩阵里的梯度值全部等比例降到255以内,以便机器可以直接显示),得到梯度边缘图像较好地抑制噪声的同时也相对细化了边缘。
1.3 边缘的细化
本文使用有方向的边缘细化,在改进的Sobel算法处理后得到的黑片边缘梯度图像,再结合已经取得的梯度矩阵结合原方向模板判定(xi,yj)点的梯度方向。在此方向上,比较(xi,yj)点和它梯度方向上的前后两个点的梯度大小,如果前后两个点的梯度值都小于此点梯度值,且此点的梯度值大于设定的阈值,则将此点梯度值设置为255,最后得到细化后的单像素边缘。
2 插值法细分得到亚像素边缘
2.1 多项式插值原理
根据多项式插值理论[4],插值函数形式如下:

式中:xk为插值点;yk为离散的函数值;f(x)为插值函数。
对已用其他算子检测确定的边缘点(xi,yi),在梯度图像 T(i,j)的方向上取三点 T(i-1,j),T(i,j),T(i+1,j),以这三点的梯度幅值作为函数值,以(xiw),xi,(xi+w)三点为插值点(其中 w为像素 x方向的间距),代入式(1)求得亚像素边缘坐标

式中h为像素y方向的间距。
2.2 多项式插值的改进
多项式插值在理论上可以获得较为精确的边缘。但原有的多项式插值法只考虑x和y两个方向上进行插值计算,结果容易丢失其他方向的精确边缘信息。本文考虑到前面使用的Sobel方向模板,与其方向结合进行准确的方向插值,可以相对较精确的边缘定位。对已经检测确定的边缘点(xi,yi),先比对原梯度模板的方向确定插值的方向,在梯度图像 T(i,j)的方向上取三点 T(i-1,j),T(i,j),T(i+1,j),以(xi- w),xi,(xi+w)三点为插值点(因为本文插值为有方向的插值,其中w为像素x方向间距的,算法在公式上同原差值算法一样。但本文在像素边缘坐标的计算上,增加了一组计算在交叉45°方向的公式。
在x和y两个方向的计算公式:

式中r、d分别为原像素点和x、y方向成45°像素点间距的
3 实验结果及精度分析
实验所用的图像为156×157的黑片灰度图像,使用的计算机配置:Intel(R)Core(TM)2 Duo CPU T5450 1.66GHz 1.67GHz;内存:2GB;用VC6.0实现本文的所有算法。
3.1 实验结果
图1为黑片的原始图像,图2为用原Sobel算法提取的边缘图像,图3为本文改进Sobel加权值后的边缘图像,图4为本文改进Sobel细化后的边缘图像,图5为本文改进Sobel加阈值细化后的边缘图像。

图1 原始黑片图像

图2 Sobel算子检测结果

图3 改进Sobel加权值后结果

图4 改进Sobel细化后的结果

图5 改进Sobel加阈值细化后的结果
由图1~图5可以看出,Sobel提取的边缘较粗,易受噪声干扰。本文改进的Sobel提取边缘较细,抗噪性相对较好;经过本文算法细化后的边缘为单像素,但出现很多伪边缘;改进添加阈值细化后得到较为理想的单像素低噪声的边缘图像。
在单像素边缘的基础上,使用两种插值算法取得的插值细化数据如表1所示。

表1 本文算法取得的部分插值数据

表2 原算法取得的部分插值数据
由表1和表2的数据可以看出,本文采用的方向插值在边缘插值的方向上有很大改进。本文算法在精度上相对原插值算法也有很大提高。
3.2 亚像素精度分析
在亚像素细化边缘得到更精确的边缘中,使用方向插值使误差降低了,根据误差理论[5],对式(4)进行微分运算,计算x方向上的误差dx.可得

因为式(4)后有限定项,则可得

由于一般的图像采集卡灰度级量化误差不大于±1个灰度级,则采用方向插值可以在误差上降低,总体结果精度较高。
4 结论
在单像素边缘检测中,本文用方向模板确定梯度的方向,从而减少了丢失边缘点方向信息的可能。在细化的过程中采用梯度图像加权值后设定阈值,在此基础上使用原方向信息确定同方向的梯度最大点为边缘点,减少了伪边缘,提高了精度。在亚像素插值中,采用有方向选择的多项式插值。在精度上有所提高,误差相对降低。
[1]罗敏,王琰.一种黑片图像亚像素边缘检测方法[J].沈阳理工大学学报,2010,4(4):77 -81.
[2]王吉林,姚励,赵力.基于改进的多项式插值亚像素法电缆护套材料厚度测量[J].电测与仪表,2009,46(12):25-32.
[3] L Sobel.Camera Models and Machine Perception[D].PhD theses,Stanford University,Standford,CA,USA,1970.
[4]章毓晋.图像工程[M].北京:清华大学出版社,2007.
[5]李庆利,张少军,李忠富,等.一种基于多项式插值改进的亚像素细分算法[J].北京科技大学学报,2003,25(3):280-283.
猜你喜欢
数学物理学报(2021年6期)2021-12-21
应用数学(2020年2期)2020-06-24
西南石油大学学报(自然科学版)(2019年1期)2019-01-28
数学年刊A辑(中文版)(2018年2期)2019-01-08
劳动保护(2018年5期)2018-06-05
华人时刊(2018年23期)2018-03-21
中华建设(2017年3期)2017-06-08
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年14期)2016-04-11
装备环境工程(2015年4期)2015-02-28
