
感应电机全阶磁链观测器矢量控制系统的离散化仿真*
2012-08-28 07:07宋文祥
电机与控制应用 2012年1期
周 杰,宋文祥,尹 赟
(上海大学上海市电站自动化技术重点实验室,上海 200072)
0 引言
感应电机全阶观测器可实现对转子磁链和定子电流的观测,并根据定子电流的估计误差和转子磁链的估计值自适应辨识出电机的实际转速和定子电阻[1-2]。该方法的优点在于回避了纯积分问题,保证了参考模型的准确性,降低了对电机参数的敏感性。但由于全阶磁链观测器是以状态重构的方式来获取异步电机不可测量的相关信息,如定、转子磁链信息等,因其数学模型是一个四阶微分方程组,给分析、研究和设计带来了难度。在这种情况下,采用MATLAB/Simulink等计算机仿真工具的方法最为实用,是解决这类工程问题的有力工具[3]。
文献[4-6]使用Simulink模块和S-function搭建的基于全阶磁链观测器连续域的感应电机模型和控制模型,这类用S函数实现电机控制方案的仿真方式具有实现简单、物理概念清晰等特点,但该连续仿真方式占用了大量CPU资源,大大影响了计算机的仿真速度,而且在需要较长时间仿真的情况下,还会出现死机等问题,给仿真分析带来了不可避免的困难。文献[7-8]使用MATLAB的电气模型仿真模块PSB和Simulink模块搭建了混合式的连续域的电机模型及矢量控制模型,但目前电机控制算法已普遍采用DSP实现,基于连续域的仿真与实际系统的设计和测试的关系并不紧密。
本文在分析了异步电机数学模型以及全阶磁链观测器控制原理的基础上,在MATLAB/Simulink中,采用模块化的方法,建立了独立的功能模块、如矢量控制模块、全阶磁链观测模块,转速估计模块等,再进行功能模块的有机整合,搭建了无速度传感器异步电机全阶磁链观测器矢量控制系统的离散化仿真模型,该模型在保证仿真精度的前提下大大提高了计算机的仿真速度。
1 异步电机全阶观测器模型
在两相静止参考坐标系下,选择电机定、转子磁链作为状态变量,异步电机状态方程为[9]


根据式(1)所示的电机状态方程,可得到相应的全阶观测器为

式中:“^”表示观测值;K为误差反馈矩阵。自适应全阶观测器结构框图如图1所示。此时,观测器的设计问题转化为根据系统的控制要求对K矩阵的设计,这与观测器的极点配置问题紧密相连。必须合理选择K阵,即适当配置观测器的极点,以使观测器具有期望的状态误差收敛速度。误差反馈矩阵K如式(3)所示[10]:。

图1 转速自适应状态观测器框图

设定观测器的极点是电机极点的k倍(k>0),那么满足该条件的误差反馈矩阵的元素可推导出如下公式形式[10]:

同时电流观测误差ei通过误差反馈矩阵K构成渐进状态观测器,通过自适应观测器对速度进行估计。根据李亚普诺夫稳定性理论,可推导出如下电机转速观测自适应律[1]:

式中:kp为比例系数,ki为积分系数,两者皆为正常数。通常在保证系统稳定性和鲁棒性的前提下,为了使得估计转速能够快速收敛于电机实际转速,kp应选取较大值;在不引起系统较大超调或振荡的前提下,为了减小系统的静差度,ki也应选取较大值[11]。
2 离散化仿真模型
本文基于MATLAB/Simulink仿真平台搭建了无速度传感器异步电机全阶磁链观测器的离散化仿真平台。本系统采用模块化的设计方法,整个系统主要分为矢量控制模块、全阶磁链观测器模块及转速自适应模块,然后将各个功能模块有机整合成为一个整体。这样做的优点是:当需要改变控制策略时,只需要对其中的功能子模块做相应的调整和修改,而无需重新搭建其他部分的功能子模块,从而可大大缩短系统的建模时间,提高系统仿真模型的通用性。
2.1 仿真设置方式
本系统采用离散化仿真方式。
参数设置如下[3]:固定步长解法是在仿真过程中都使用相同步长,此类解法不提供错误控制和零值通过检测。离散解法是对没有连续状态的系统求解所使用的一种特殊的解法。尽管几乎所有的Simulink解法都可以适用于这样的系统,但离散解法是最快的。同样将Powergui中的仿真方式也设置为离散化仿真方式,并将采样周期时间设置为Ts。本系统仿真模型所用到的相关电机参数及控制器参数以及采样周期时间Ts均通过MATLAB回调函数来实现,即事先将相关参数编译为M文件或者M文件函数,然后通过回调函数来调用,这样在打开本系统仿真模型的同时,Simulink即自动调用M文件或者M文件函数来给本仿真模型赋予相关参数值。如需要改变采用周期时间Ts或者电机参数值,只需打开M文件,进行修改即可。
2.2 仿真采样周期
离散化仿真的采样周期可用来控制仿真精度和速度。由于仿真系统各个部分的采样周期可以各自分开设置,各部分的仿真精度可通过各自的采样周期来控制,同时可兼顾仿真速度和精度的要求。此外,控制算法的离散化仿真,有利于和实际的数字控制系统保持一致。此处要说明的是,由于采用连续系统仿真时,式(2)所示的全阶磁链观测器是一个4阶的微分方程组,同时式(5)所示的转速自适应律中也包含一个连续积分器。因此,需要将该系统数学模型中所涉及到的5个连续积分器转变为离散时间域的积分器。
2.3 离散时间域积分器的实现
离散时间域的积分器积分算法又主要分为前向欧拉法、梯形法和后向欧拉法三种。比较该三种数值方法,有如下特点:
(1)前向欧拉法的精度较低,为1阶精度,但算法简单,计算量小,易于实现;
(2)梯形法的精度较高,为2阶精度,但算法复杂,计算量大,较难实现;
(3)后向欧拉法的计算量介于上述两者之间,但精度与前向欧拉法一样都是1阶。
经大量仿真验证后可得到如下规律:当把离散时间域的积分器模块的采样周期时间设置为与系统整个采样周期时间Ts一致时,通过选择前向欧拉法就能兼顾系统对于精度和速度的要求,能够得到理想的结果。即此时矢量控制模块,全阶磁链观测器模块以及转速自适应模块的采样时间均设置为Ts,此时本系统除常数模块和混合模块外,所有模块的颜色都为红色,见各个模块结构框图,即最快的离散采样时间。该方法的优点可通过MATLAB自带的用颜色来反映采样速率的功能来验证。
2.4 不同颜色所对应的采样速率
在Simulink的formate菜单下有一个sample rate colors选项,其作用就是用不同的颜色来反映模型中不同模块的采样速率的快慢。同时,通过将各个模块之间的采样周期设置为一个相同值Ts,还可避免因不同模块之间存在不同采样速率时采用如一阶保持器、零阶保持器等速率转化模块,从而简化了系统,提高了整个仿真系统的可靠性。下面讨论几个主要环节模块的建立。
2.5 全阶磁链观测器
本系统采用外环为磁链开环,转速闭环,内环为电流闭环的双闭环控制策略。旋转变换所需要的转子磁链角度以及转速闭环所需要的电机转速均由全阶磁链观测器及转速自适应模块观测出。
根据式(2)所示的全阶磁链观测器模型可搭建出功能模块。以定、转子磁链为状态变量的无速度传感器全阶观测器需要5个输入量,分别为:定子电流isα和isβ,定子电压usα和usβ,以及转速自适应模块辨识出的电机转速ωr。从而可观测出电机的定、转子磁链及定子电流。矢量控制所需要的是转子磁链的幅值及角度,为了评估该观测器的性能,可将其估计量与电机实际的转子磁链幅值及角度进行对比。如果需要将全阶磁链观测器应用于直接转矩控制系统或者按定子磁链定向的控制方案,只需要对观测出的定子磁链进行相应处理即可。因此,本文所采用的全阶观测器通用性较强、可移植性较好,可同时应用于矢量控制及直接转矩控制系统的仿真。
2.6 转速自适应模块
根据式(5)所示的转速自适应律,可搭建出图2所示的转速自适应估计功能模块。

图2 转速自适应模块
该转速自适应律需要6个输入量,分别为:定子电流实际分量is和is,定子电流估计分量和,转子磁链估计分量和。其中 4 个 估计分量可直接由全阶磁链观测器得到。同样,为了对估计转速的正确性进行评估,将其与电机实际转速进行比较。
3 仿真结果及分析
本文基于MATLAB/Simulink,采用模块化的方法实现了无速度传感器全阶磁链观测器离散化的仿真,提升了仿真速度和效率。仿真模型所采用的交流异步电机参数如下:Pe=4 kW,Ue=400 V,fe=50 Hz,ne=1 430 r/min,Rs=1.405 Ω,Rr=1.395 Ω,Lm=0.172 2 H,Ls=Lr=0.178 039 H,J=0.013 1 kg·m2,np=2。
仿真参数:转子磁链给定值ψr*=0.95 Wb,在t=0.1 s给定转速指令f*r=40 Hz(即1 200 r/min),在t=1 s加载额定负载转矩TL=25 N·m,采样时间Ts=20 μs,仿真时间为 3 s。
模型中各控制器参数如下。ASR:kP=0.8,kI=60,积分限幅值为±15;ACMR:kP=15,kI=1 500,积分限幅值为 ±320;ACTR:kP=15,kI=1 500,积分限幅值为±320;转速自适应律:kP=15,kI=5 000;全阶磁链观测器误差反馈矩阵极点配置比例系数k=1.5。
进行全阶状态观测器离散化仿真研究的最大优点在于有状态的真实值可以参考,如电机的实际磁链幅值及角度、电流、转速等。为了验证本文所设计的异步电机全阶观测器离散化仿真模型的动、静态性能及其有效性,在电机空载起动至稳定运行后,在t=1 s时,突加电机额定负载转矩TL=25 N·m。从而可得系统的转速、转矩等响应波形。在整个0~3 s时间内系统仿真速度较快,仅需约1 min。基于S-function搭建的全阶磁链观测器连续域感应电机控制模型仿真方法,其仿真0.5 s需耗时近20 min。显然,本文给出的离散化仿真模型大大提高了系统仿真速度。
图3(a)给出了电机实际转速与辨识转速波形,图3(b)为二者误差结果。可看出在t=1 s时,突加额定负载转矩TL=25 N·m,此时电机转速稍有跌落,但很快就能恢复到给定转速,从空载到加载过程中,辨识转速几乎完全能准确跟踪电机实际转速。
同样,在t=0.1 s给定转速 1 200 r/min,在t=1 s加载额定负载转矩TL=25 N·m时,电机由空载到加载时的输出转矩响应波形如图4所示,可看出输出转矩脉动小、响应速度快、电机运行平稳。图5给出了从电机空载到加载时定子电流局部放大波形。
图6(a)为电机实际转子磁链与估计转子磁链角度波形,二者误差结果如图6(b)所示。
图7(a)给出了电机实际转子磁链与估计转子磁链幅值波形,二者误差结果如图7(b)所示。
从图6和图7可看出,在空载和加载条件下,电机估计转子磁链均能准确、快速地跟踪上电机实际转子磁链。

图3 在t=0.1 s给定转速1 200 r/min,在t=1 s加载额定负载转矩TL=25 N·m

图4 电机输出转矩响应
4 结语
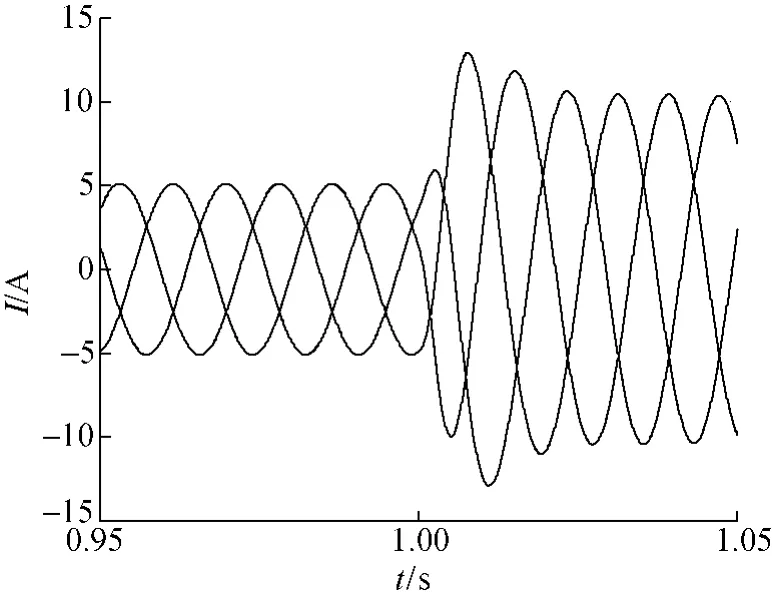
图5 定子电流局部放大

图6 在t=0.1 s给定转速1 200 r/min,在t=1 s加载额定负载转矩TL=25 N·m
本文基于MATLAB/Simulink仿真环境和模块化思想建立了异步电机全阶观测器矢量控制系统的离散化仿真模型,并对离散化仿真的系统关键设置给出了详细说明。所给出的离散化仿真模型具有如下特点:
(1)矢量控制模块、全阶磁链观测器及转速自适应模块全部由Simulink模块实现,结构简单明了;
(2)采用模块化思想建立的仿真系统,可以方便地进行修改和移植,且电机控制方案的所有参数都可以在线变更;
(3)该离散化仿真模型的最大优点在于显著缩短了仿真所需要的时间,仿真3 s仅约需耗时1 min,可与Simulink提供的异步电机矢量控制示例模型(Demos)的仿真速度相媲美,从而可快速便捷地验证各种电机控制算法。(4)可以通过合理设置离散化采样周期控制仿真速度,并兼顾系统仿真精度,为电机控制系统的快速仿真研究提供了一条思路。

图7 在t=0.1 s给定转速1 200 r/min,在t=1 s加载额定负载转矩TL=25 N·m
[1]KUBOTA H,MATSUSE K,NAKANO T.DSP-based speed adaptive flux observer of induction motor[J].IEEE Transactions on Industry Applications,1994,30(5):1219-1224.
[2]KUBOTA H,MATSUSE K.Speed sensorless field-oriented control of induction motor with rotor resistance adaption [J].IEEE Transactions on Industry Applications,1997,44(4):528-535.
[3]肖田元,范文慧.系统仿真导论[M].2版.北京:清华大学出版社,2010.
[4]魏子良,张庆范.Simulink用于现代矢量控制系统的仿真研究[J].计算机仿真,2003,20(10):65-67.
[5]王海峰,任章.异步电机矢量变换控制系统的MATLAB/Simulink仿真[J].电气传动自动化,2003,25(4):23-25.
[6]张玉霞,刘海燕,张瑾.异步电机矢量控制系统仿真研究[J].大连大学学报,2005,26(2):44-47.
[7]黄孙伟,赵钢.基于Simulink的交流异步电机矢量控制系统的仿真[J].天津理工学院学报,2004,20(4):89-91.
[8]纪志成,薛花,沈艳霞.基于MATLAB交流异步电机矢量控制系统的仿真建模[J].系统仿真学报,2004,16(3):384-389.
[9]陈伟,于泳,杨荣峰,等.异步电机自适应全阶观测器算法低速稳定性研究[J].中国电机工程学报,2010(36):33-40.
[10]宋文祥,姚钢,周文生,等.异步电机全阶状态观测器极点配置方法[J].电机与控制应用,2008(09):6-10.
[11]SUWANKAWIN S,SANGWONGWANICH S.Design strategy of an adaptive full order observer for speed sensorless induction motor drives-Tracking performance and Stabilization[J].IEEE Trans on Industry E-lectronics,2006,53(1):96-119.
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年4期)2020-12-14
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
电测与仪表(2014年11期)2014-04-04
