
压缩机用内置式永磁同步电机无位置传感器控制
2013-01-16 00:58黄守道陆凯元
电工技术学报 2013年5期
黄守道 高 剑 肖 磊 陆凯元
(1.湖南大学电气与信息工程学院 长沙 410082 2.奥尔堡大学能源学院 奥尔堡 9000)
1 引言
永磁同步电机(PMSM)以其高效率、小体积、重量轻等优点被广泛应用于在许多工业应用中,其在压缩机领域的应用也得到了各国工业界,学者的广泛关注[1]。永磁电动机处于密封的压缩机中,压缩机内温度超过 120℃,且充满强腐蚀性的高压制冷剂,无法安装位置传感器,因此,必须采用无位置传感器控制方法[2]。目前绝大多数的永磁同步电机无位置传感器控制算法可分为反电动势估算与高频注入两大类。基于反电动势模型无位置传感器方法由于在电机运行的中高速具有良好的的控制性能,获得了国内外学者大量的关注,取得了大量的成果。在一些学者的研究中,转子信息的获得需要通过对电机端电压进行积分,这不可避免的会带来直流偏移,虽然可以通过滤波的策略来消除直流偏移,但会影响中低速下转子位置的获取[3]。滑模变结构无位置控制策略以其强鲁棒性,对参数及系统噪声的不敏感性,以及不需采用积分的方式,成为了反电势方法中重要的分支[4]。但是大多数研究中针对了皆为面贴式永磁同步电机而不是内置式永磁同步电机(IPMSM),忽略 dq轴电感差异[5-8]。文献[7]在α-β坐标系下建立完整 IPMSM 滑模变结构模型,但是其观测器中含有许多与转子位置有关的变量,其稳定条件将会比较复杂。文献[8]采用提出了一种扩展反电动势滑模观测模型,考虑了Ld与Lq的差异对模型的影响,但是其观测模型中含有速度信息,速度估计的准确性与Ld由于饱和特性所引起的变化都会影响观测器的准确性。
与其他基于反电动势方法无位置传感器控制技术一样,滑模观测器虽然在中高速具有优良的性能,但是其在低速状态尤其是超低速情况下观测效果较差。但对于压缩机而言,其运行工况是全速度范围,且其在全速度范围内均处于带载状态,因此需要采用一定的控制策略来满足压缩机用永磁同步电机在启动与超低速下的运行控制。
本文提出了一种新的滑模观测器模型,用于压缩机用内置式永磁同步电机中高速转子位置的观测,转模型中只含有q轴电感(很难饱和)而无需d轴电感,同时观测器中采取低通滤波器串联的方式来实时获得反电动势信息与滤波器引起的相移,同时,一种恒电流变频(I-F)的起动与超低速下控制策略以及算法切换策略同样在本文中被应用于压缩机永磁同步电机低速工况下的运行。
2 内置式永磁同步电机数学模型
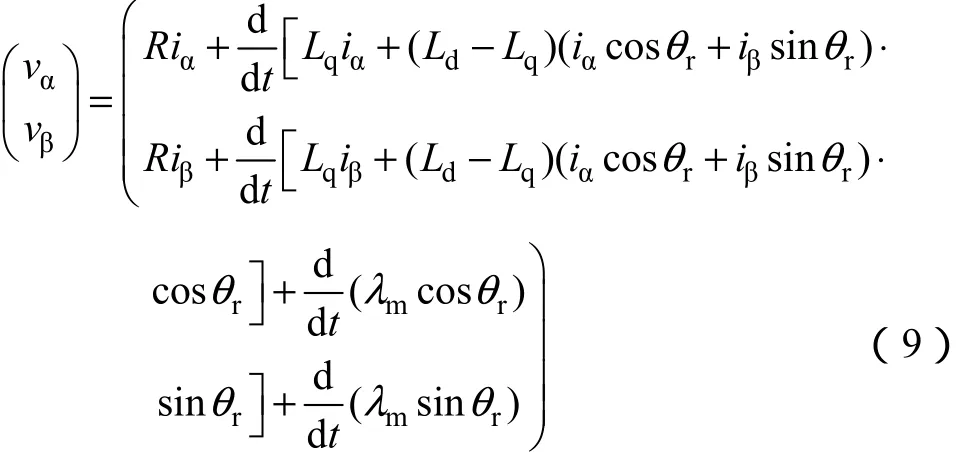
内置式永磁同步电机在静止两相α-β坐标系的数学模型可写为

式中v——定子电压矩阵,vαβ=(vαvβ)T;
i——定子电流矩阵,iαβ=(iαiβ)T;
λ——定子磁链矩阵,λαβ=(λαλβ)T;
R——定子相电阻。
式中

式中

式中θr——内置式永磁同步电机的转子位置;
λm——转子磁链幅值。

3 内置式永磁同步电机滑模观测模型
永磁同步电机转子位置角通常滞后于永磁同步电机反电动势矢量角90°,因此在传统的基于反电动势的位置观测方法中,转子位置通常可以通过式(7)获得。

e˜sα——观测的转换至两相静止坐标系下α轴反电动势;
e˜sβ——β轴反电动势。
然而反电动势通常不能直接获得,本文在此处将采用滑模变结构观测器来获得永磁电机的反电动势。传统的滑模变结构位置观测器结构图常如图 1所示。

图1 滑模观测器结构图Fig.1 Structure diagram of sliding mode observer
在本文中为了设计 IPMSM滑模位置观测器,电压模型式(1)被改写为

将式(5)与式(6)代入式(8),并做数学变换可得到
静止坐标系下α轴电流与β轴电流可以通过式(10)转换至转子同步旋转d-q坐标轴系下d轴电流

引入一种特别反电动势矩阵,内置式永磁同步电机定子电压模型可改写为

式中p——微分算子。
反电动势矩阵为

Em为矢量E的幅值,因此当已知矢量E的位置角θE与Δθ的情况下,就可以获得转子的初始位置。对于Δθ而言,在稳态情况下,did/(dt)为零,因此在稳态时Δθ=π/2,而对于压缩机而言,其负载是连续的且随着转子位置的变化而变化,因此在全工况下,可以假定Δθ=π/2。则 IPMSM 转子位置θr=θE-π/2。因此,IPMSM转子位置信息可以通过观测矢量E的矢量角来获得。为了观测矢量E,IPMSM电压方程可改写为

如图1所示在滑模观测器常通过将采集的定子实际电流与观测器中估计的定子电流进行比较,误差通过采用饱和函数来实时修正观测模型。因此滑模观测器中定子电流观测模型见式(16)。
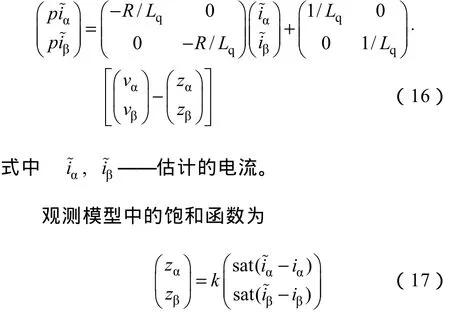
为了消除饱和函数在连续饱和时带来的抖振,矢量E的αβ轴分量Eα与Eβ可以通过采用一阶低通滤波器来获得。然而一阶低通滤波器不可避免地会带来相移,同时 IPMSM 的转速为不断变化的,因此,Eα与Eβ的频率亦是不断变化的,一阶低通滤波器的相移亦是随着转速不断变化而变化。本文将两个相同的一阶低通滤波器串联来实时获得由于采用一阶低通滤波而产生的相移,而不需要转速信息,如图2所示。

图2 用于滑模观测器中的低通滤波器组合Fig.2 Block diagrams of the low-pass filter used in SMO
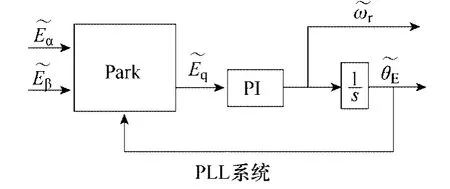
图3 转子位置锁相系统Fig.3 The PLL system

图4 IPMSM滑模位置观测器Fig.4 Block diagram of the sliding mode observer based rotor position estimation
滑模位置观测器的关键环节是确保系统稳定运行于滑模面上。在本文系统中,滑模面Sn被定义为(与)与实际电流(iα与iβ)之差。

而其滑模存在的充要条件为

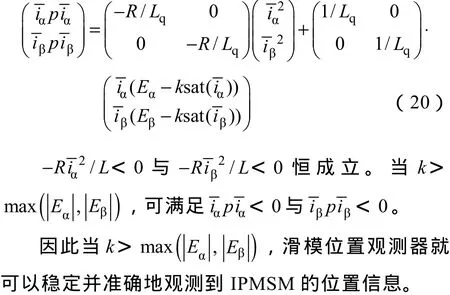
将式(15)与式(16)代入式(19)可得
4 内置式永磁同步电机起动与切换策略
与其他反电动势无位置传感器控制策略一样,滑模无位置传感器只适合运行于中高速,因此在起动与低速状态下,需要额外的起动策略,以及无冲击的从起动策略切换到滑模无位置控制策略。同时由于压缩机工况的特殊性,起动策略需要具有强鲁棒性与工作在不同负载情况下[9]。
本文应用一种叫做 I-F的控制策略来实现永磁电机的起动,其可以在多负载情况下实现稳定的平滑的控制。I-F控制策略将永磁同步电机定子电流矢量定向于同步旋转坐标系的q轴,q轴电流指令为额定电流的幅值,d轴电流指令为0。与传统永磁同步电机V-F控制相类似,采用I-F控制时,永磁电机频率采用斜坡指令的形式,从0牵引至指定频率。I-F控制框图如图5所示。
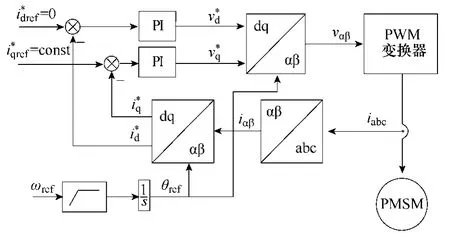
图5 I-F控制策略框图Fig.5 Block diagrams of the I-F control method
在采用I-F带负载运行时,其矢量图如图6所示,其中d-q坐标系为采用转子磁场定向时同步旋转坐标系,dq*坐标系为采用I-F控制时,将电流矢量定位坐标系q轴时的同步旋转坐标系。I-F控制策略具有自稳定功能[10],由图5可见,在采用I-F控制带载运行时,dq坐标系与dq*坐标系存在着负载夹角θL,且随着负载的变化,θL亦不断变化。
当永磁同步电机运行于中速阶段时,此时滑模位置观测器已能很好的估计永磁同步电机转子位置,为了提高电机的运行效率,需要将控制策略切换至滑模无位置传感器控制策略。由于在切换前,由于滑模位置观测器已能实时准确地观测转子,因此,上文提到的夹角θL亦能实时获得,在切换时采用坐标变换的方式把控制量全状态切换至转子磁链定向同步旋转坐标系下。由于,只是对控制量进行了坐标变换,因此即使存在稍许误差,对电机的冲击亦会很小,基本可以实现无冲击切换,同时在切换后采用斜坡的方式将d轴电流减至0。
综上所述,采用转速电流双闭环矢量控制压缩机永磁同步电机无位置传感器控制策略系统框图如图7所示。
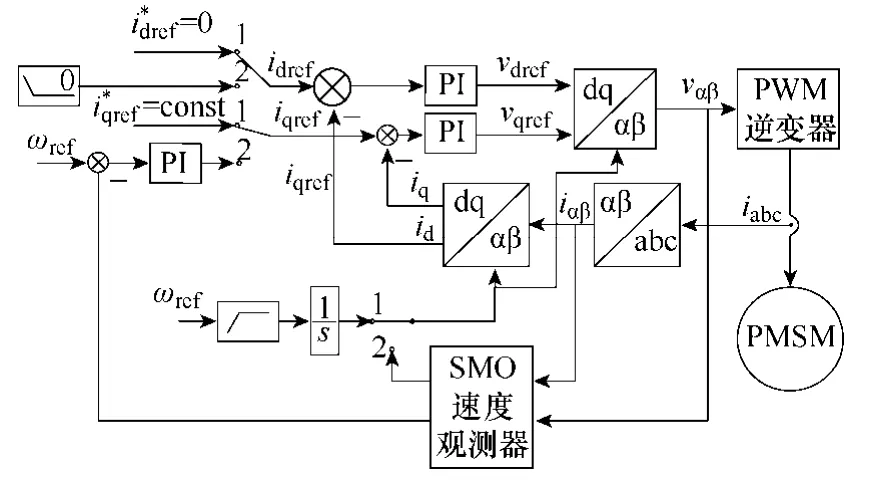
图7 压缩机用永磁同步电机无位置传感器控制策略Fig.7 The whole switching method for the sensorless control of IPMSM using in the compressor
5 实验验证
建立实验平台对本文所提算法进行实验验证。实验系统参数见下表,实验现场照片如图8所示。采用丹佛斯 F302变频器作为功率单元,用 eZdsp TM-F28335作为控制板,用真实压缩机作为负载,压缩机在转速为62.83rad/s时的负载曲线如图9所示。

表 实验用IPMSM主要参数Tab. Parameters of the experiment IPMSM

图8 实验系统照片Fig.8 The photo of the experiment system
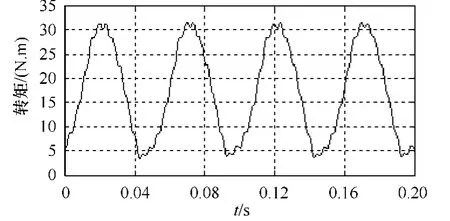
图9 压缩机运行于600r/min时的负载曲线Fig.9 The torque curve of compressor running in the 600r/min
图 10为采用本文所述滑模位置观测器估计的转子位置与估计误差,由图可见位置估计准确度较高,最大误差约为2°。图11为基于压缩机负载的IPMSM 电机采用本文所述启动策略及无位置传感器控制策略从0速起动至800r/min时的转速曲线与dq轴电流曲线。在策略切换前,采用I-F控制策略,将电流矢量定向于q*轴,由于压缩机在转速低是峰值负载较轻,因此,在dq*坐标系下,q*轴电流设为10A,d*轴电流设为0,转速转至200r/min左右时,按照本文叙述的切换策略,切换至转子磁链定向滑模无位置传感器矢量控制策略,此时在转子磁链定向同步旋转dq坐标系下,存在着正向10A的d轴电流,在切换后,采用斜坡递减的方式减至0。q轴电流给定为速度外环的输出。图12为全状态的定子电流波形,由图可见在切换的瞬间电流基本无冲击。

图10 转速为600r/min时采用滑模位置观测器估计的转子位置与估计误差Fig.10 The experimental results of estimate rotor position and error running in the speed 600r/min

图11 本文所提控制策略转速与dq轴电流波形Fig.11 The results of speed and d-q axis current
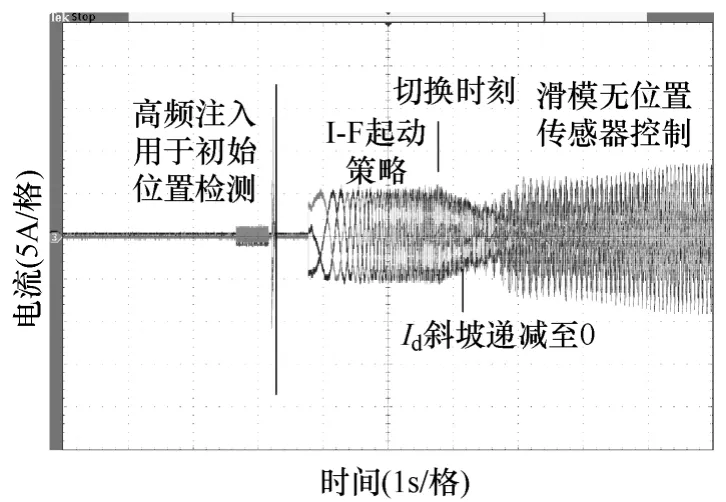
图12 本文所提控制策略永磁同步电机相电流实验波形Fig.12 The results of phase current
6 结论
本文通过数学模型研究出了内置式永磁同步电机滑模位置观测模型,这种模型中只含有饱和影响较小的q轴电感Lq,而回避了容易受饱和影响的d轴电感,并且在模型中观测模型中不含有速度信息,模型用于压缩机用永磁同步电机在中高速具有良好的观测性能。在对反电动势采集时采用的双滤波器串联的方式,能够有效的,准确的获得滤波器引起的相移用于角度补偿。采用的 I-F起动策略与切换策略具有较强的鲁棒性,能够适应在压缩机启动过程中负载的不断变化的工况。实验系统对本文所提的滑模无位置传感器控制算法,以及 I-F起动与切换策略进行了验证,证明了算法的有效性。
[1] Shi J, Liu T, Chang Y. Position control of an interior permanent-magnet synchronous motor without using a shaft position sensor[J]. IEEE Transactions on Industrial Electronics, 2007, 54(4): 1989-2000.
[2] Ching T W. An investigation on electrical performance of variable-frequency drives for air-conditioning applications[C]. in Proc. EPEC2008: 1-7.
[3] 尚喆, 赵荣祥, 窦汝振. 基于自适应滑膜观测器的永磁同步电机无位置传感器控制研究[J]. 中国电机工程学报, 2007, 27(3): 23-27.Shang Zhe, Zhao Rongxiang, Dou Ruzhen. Research on sensorless control method of PMSM based on an adaptive sliding mode observer[J]. Proceedings of the CSEE, 2007, 27(3): 23-27.
[4] 王丽梅, 郭庆鼎. 基于转子凸极跟踪的永磁同步电动机转子位置的自检测方法[J]. 电工技术学报,2001, 22(2): 14-17.Wang Limei, Guo Qingding. Rotor position estimation for permanent magnet synchronous motor using saliency-tracking self-sensing method[J]. Transactions of China Electrotechnical Society, 2001, 22(2): 14-17.
[5] Hongryel Kim, Jubum Son, Jangmyung Lee, et al. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4069-4077.
[6] Zhiqian Chen, Tomita M, Doki S, et al. An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors[J].IEEE Transactions on Industrial Electronics, 2003,50(2): 288-295.
[7] Zhang Yan, Vadim Utkin. Sliding mode observers for electric machines-an overview[C]. in Proc. IECON 02,2002: 1842-1847.
[8] Hasegawa M, Matsui K. Position sensorless control for interior permanent magnet synchronous motor using adaptive flux observer with inductance identification[J]. IET Electric Power Applications,2009, 3 (3): 209-217.
[9] Marius Fatu, Remus Teodorescu, Ion Boldea,et al.I-F starting method with smooth transition to EMF based motion-sensorless vector control of PM synchronous motor/generator[C]. in Proc. PESC, 2008: 1481-1487.
猜你喜欢
微电机(2022年8期)2022-10-12
微特电机(2021年11期)2021-11-16
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
北京航空航天大学学报(2017年6期)2017-11-23
光学精密工程(2016年3期)2016-11-07
铁道科学与工程学报(2015年5期)2015-12-24
大电机技术(2015年5期)2015-02-27
