
一种改进的逆变器并联列车辅助供电系统
2013-01-16 00:58姚晓阳
电工技术学报 2013年5期
沈 坤 章 兢 姚晓阳 王 坚
(1. 湖南大学电气与信息工程学院 长沙 410082 2. 株洲南车时代电气股份有限公司技术中心 株洲 412001)
国家自然科学基金(61174140)和国家高技术研究发展计划(2011AA110505)资助项目。
1 引言
对于逆变电源系统,采用逆变器并联技术将降低电源系统对单台逆变器容量及可靠性的要求,同时提高供电系统的可扩展性及冗余度,该技术已在多种供电系统中得到了广泛地研究及应用[1-8]。
逆变器并联系统控制的主要目标是:各并联逆变器均分系统负载,同时保证各逆变器输出电压的幅值、频率和相位等参数一致。主要的逆变器并联控制方法有集中控制、主从控制、分布式控制及无互连线控制等,其中无互连线控制是当前逆变器并联系统控制采用的主要形式[2-8]。无互连线控制即PQ(有功功率、无功功率)下垂控制,它基于逆变器输出的下垂特性,即当并联系统中各并联逆变器输出电压的相位、幅值偏差较小时,并联系统的有功环流与输出电压的相位差有关,无功环流与输出电压的幅值差有关。因此各逆变器模块以各自的有功功率P和无功功率Q为依据,调整各自输出电压的频率和幅值,从而实现系统中各并联逆变器的均流运行[1]。经典的PQ下垂控制系统结构由功率控制环、电压外环及电流内环等三环组成[4,8]。
对于采用 PQ下垂控制的逆变器并联系统,文献[4]通过根轨迹分析指出功率控制环参数设置是影响逆变器并联系统动态性能的主要因素;文献[5]在功率控制环中考虑了有功功率微分、积分项及无功功率微分项的影响;文献[6,7]则针对并联逆变器输出阻抗及连线阻抗之和的阻抗特性,分析了逆变器输出有功、无功对其输出电压的相位及幅值的综合影响;文献[8]针对采用DC 600V集中供电分散变流供电方式[9]的 25T、25G型客车,设计了一种采用 PQ下垂控制逆变并联技术的列车辅助供电系统,实现了交流辅助供电系统全列冗余[8],但未对功率控制环下垂控制器的参数进行分析和设计。
本文在文献[8]的基础上,为了进一步减小各并联逆变器之间的环流,将并联逆变器输出有功功率的积分项加入到系统下垂控制策略中;同时,采用小信号分析方法构建并联逆变器功率控制环的小信号模型,应用根轨迹法分析下垂控制器各参数对系统稳定性及动态性能的影响,并最终确定了并联逆变器下垂控制器的参数;最后通过仿真及实验验证了所设计下垂控制策略及参数的有效性。
2 基于逆变器并联技术的列车辅助供电系统
采用逆变器并联技术的DC600V列车辅助供电系统的结构框图如图 1所示[8]。其系统结构在原有DC600V集中供电分散变流辅助供电系统的基础上,将各车辆的三相逆变器输出并联起来形成三相交流母线,再由交流母线向各车辆负载供电。
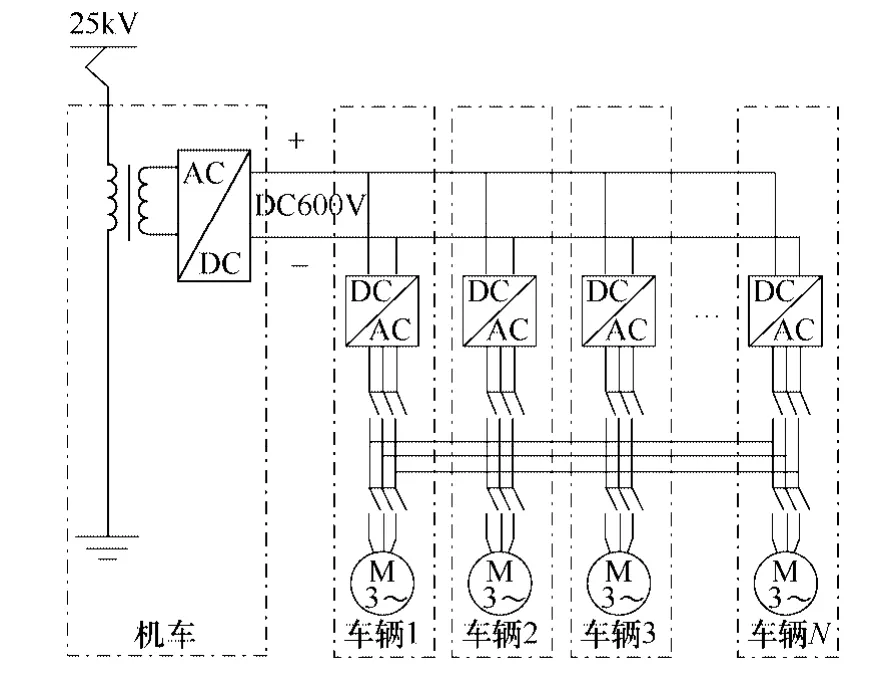
图1 基于逆变器并联技术的DC600V客车辅助供电系统Fig.1 The DC600V carriage auxiliary power system based on inverter parallel technology
本文采用的逆变器并联系统控制器结构为三环控制结构,由功率控制环、电压外环及电流内环组成。功率控制环即 PQ下垂控制器,它根据逆变器输出功率调节电压外环控制器的给定电压值:电压外环控制器通过 PI调节实现逆变器输出电压对该给定电压的跟踪,并生成电流内环控制器的给定电流值;而电流内环控制器的快速调节特性则实现了对系统动态特性的改善,并最终生成三相逆变器PWM 调制电压信号。采用三环控制结构的逆变器并联列车辅助供电系统结构框图如图2所示,其中三相逆变器为 IGBT全桥逆变器,三相滤波电容采用△联结。
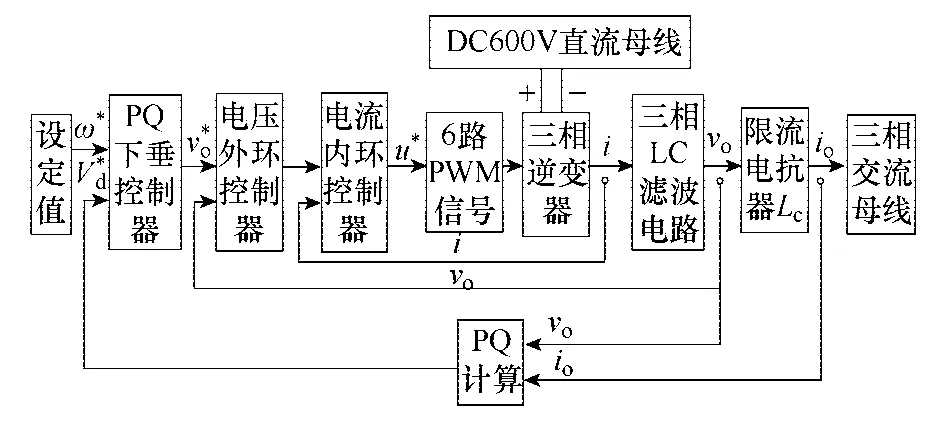
图2 并联逆变器系统控制结构框图Fig.2 Block diagram of parallel inverter control
为实现对三相逆变器输出电量的跟踪控制,本文对图2中abc坐标系下的三相电量进行同步旋转坐标变换,得出其在dqo坐标系下的直流分量。本文采用的坐标转换矩阵Tabc/dqo为
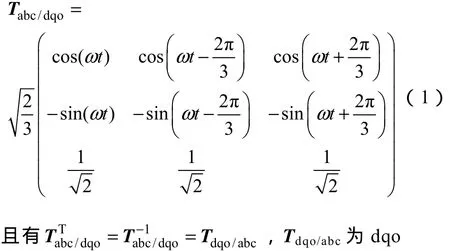
坐标系到abc坐标系的转换矩阵,同时假设系统三相电量对称,则三相电量在dqo坐标系下的o轴分量为零。
在dqo坐标系下并联逆变器输出有功功率P、无功功率Q的计算式为
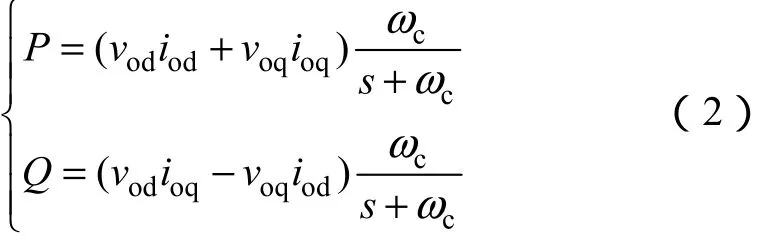
式中,ωc为一阶低通滤波器的截止频率,用于将在dqo坐标下计算的有功、无功功率瞬时值转化为平均值。
本文中的三相逆变器并联系统由各三相逆变器经限流电抗器连接而成,因此认为逆变器输出连线阻抗为纯感性。为了进一步减少各并联逆变器之间的环流,本文在文献[8]的基础上,在其下垂控制策略的逆变器输出电压频率控制函数中加入逆变器输出有功功率的积分项,得出本文采用的 PQ下垂控制策略为

电压外环控制包括逆变器输出电流的前馈控制及输出电压的PI控制和解耦控制,其控制策略为


电流内环控制包括逆变器输出电压的前馈控制及输出电流的PI控制和解耦控制,其控制策略为

式中,Kpi、Kii为电流内环 PI控制器参数;Lf为三相LC滤波电感;G2为输出电压前馈增益。
3 下垂特性小信号建模与分析
本文中系统的下垂控制方程由式(3)实现,不失一般性。设某一并联逆变器输出连线感抗为X,逆变器输出电压的幅值为V,相位为δ,交流母线电压的幅值为Vs,相位为δs,且δ-δs= ∫ (ω-ωs)dt。
则逆变器输出功率为

在 稳 态工作点 (δo,δso
,Vo,Vso),逆变器输出功率的小信号方程为[4]
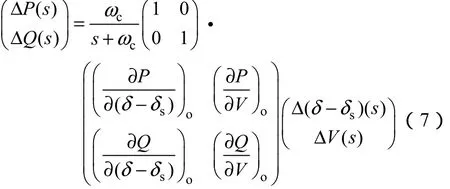
式中,ωc为低通滤波器截止频率;( )o表示按稳态工作点计算括号内数值。
结合下垂控制策略式(3)得到闭环控制系统的小信号方程

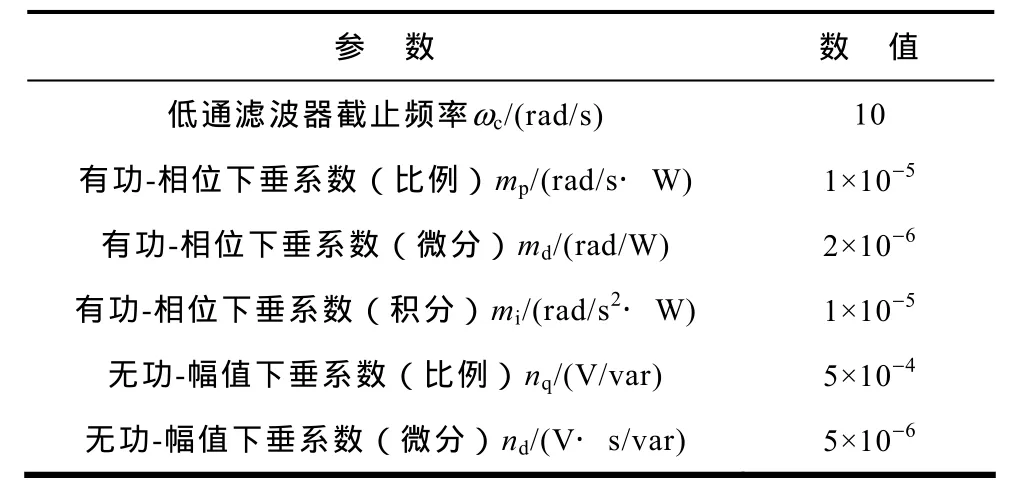
本文通过根轨迹法分析上述下垂控制策略中参数的变化对系统稳定性及动态性能的影响,具体过程为在保持其他参数不变的前提下,改变某一参数,考察该参数变化时式(9)根的变化。系统电气参数及下垂控制策略参数见表,各参数变化时系统的根轨迹如图3所示。

表 系统及下垂控制策略参数表Tab. Parameters of system and droop control strategy
(续)
由图 3a~3c可知,参数mp、md、mi的变化对系统稳定性及动态性能的提升起到决定性的作用,而在图 3d、图 3e中,参数nq、nd的变化对主导极点λ3、λ4几乎没有影响。
在图 3a中,参数mp增大时,共轭极点λ3、λ4在点(-1.93,0)由共轭复根变为负实根,之后λ4向零点方向运动,λ3向负无穷大方向运动并在点(-11.9,0)与极点λ2相交后变为共轭复根。在此过程中,系统主导极点由共轭极点λ3、λ4变为负实极点λ4,即可认为系统特性由二阶变为一阶。因此为提高系统动态性能,mp不宜取值过大。但较小的mp值使得主导极点的实部绝对值较小,系统对扰动的抑制速度变慢,且mp<3×10-7时,共轭极点λ3、λ4将进入S平面的右半侧,系统将不稳定。而事实上在给定并联逆变器输出电压频率允许偏差的前提下,较小的mp值将获得较大的逆变器输出有功,但逆变器并联系统设计时并不追求单台逆变器的输出有功最大,因此参数mp的选取并非越小越好。

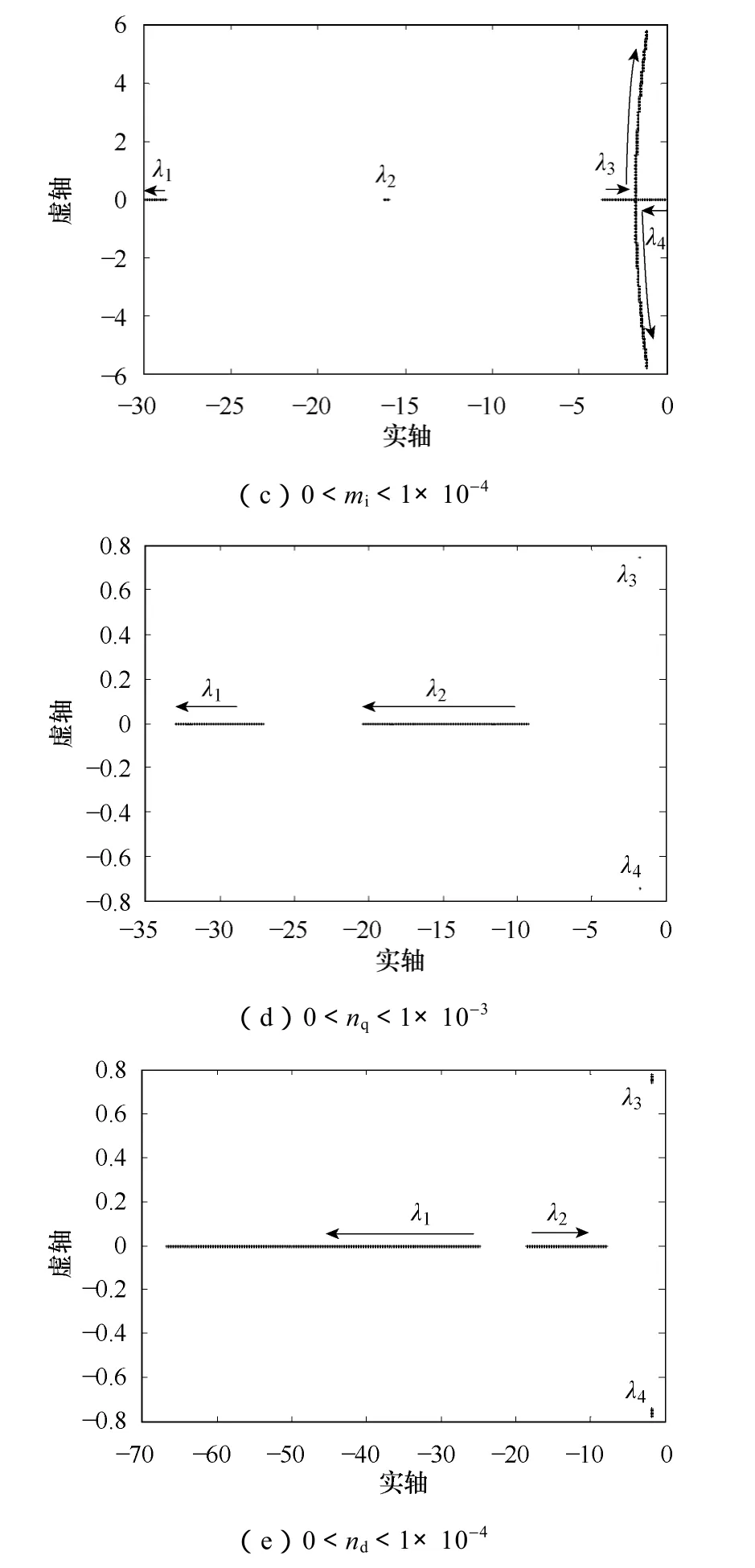
图3 系统根轨迹图Fig.3 The root locus of system
在图 3b中,参数md增大时,共轭极点λ2、λ3在点(-8.14,0)由共轭复根变为负实根,之后λ2向负无穷大方向运动,λ3向零点方向运动并在点(-2.1,0)与极点λ4相交后变为共轭复根。因此,当md取值较大时,系统特性可由二阶系统近似。
在图 3c中,参数mi增大时,负实极点λ1、λ2几乎不变,且远离零点,它们对系统特性的影响较小。而主导极点λ3、λ4在点(-1.78,0)由负实根变为共轭复根,此时系统动态性能将增强。但mi取值较大时,主导极点的虚部绝对值较大,系统振荡频率较高,对于逆变器输出电压信号的频率 50Hz而言,应尽量使得系统振荡频率越小越好,且mi增大到一定值时,共轭极点λ3、λ4将进入S平面的右半侧,系统将不稳定。
由图3d、3e可知,参数nq、nd的变化对系统控制性能影响较小,但其取值将影响参数mp、md、mi的根轨迹。
图4为nd取5×10-4时,参数mp变化的系统根轨迹图。对比图4与图3a可知,参数nd增大后,极点λ1对系统的影响更加微弱,而极点λ2对系统的影响则加强,系统动态特性可由三阶系统近似,系统惯性增大,动态调节时间增长。此外,参数mp取较小值时,系统极点仍处于S平面左半侧,这说明系统稳定性有所增强,但系统主导极点λ3、λ4在点(-1.17,0)处相交于负实轴,与图3a相比系统稳定裕量有所降低。

图4 nd取5×10-4时系统根轨迹图(0<mp<3×10-5)Fig.4 The root locus of mp with nd=5×10-4
综上所述,为改善逆变器并联系统的动态响应品质,同时保证系统的稳定性,本文确定的下垂控制器参数见前表。
4 仿真
为验证上述设计及分析方法的有效性,本文采用Matlab构建了如图1所示的两台辅助逆变器并联的DC600V列车辅助供电系统。采用如图2所示的系统控制结构,其中系统下垂控制器参数见前表,系统主要的电气参数为:Lf=0.9mH,Cf=18μF,Lc=1mH,开关频率f=2 850Hz,单台逆变器负载为35kV·A,负载功率因数λ=0.85。
针对列车辅助供电系统运行的特点,本文对所构建的逆变器并联列车辅助供电系统仿真模型进行负载突变实验。具体实验过程为:先由逆变器1建立交流母线电压,再启动逆变器2;逆变器2先通过锁相环实现对交流母线电压相位的跟踪,待其稳定运行后切除锁相环,由其下垂控制器控制运行(此时下垂控制器输出为逆变器输出电压频率及幅值的设定值),并待其稳定运行后将逆变器2并入交流母线,实现逆变器1与逆变器2空载并联;之后投入负载,实现逆变器1、逆变器2带负载并联;最后切除部分负载,进行负载突变仿真实验。
列车辅助供电系统负载突变仿真实验波形如图5所示。逆变器1启动后,逆变器2在1.1s后启动,并于1.3s并入交流母线实现空载并联,系统在1.5s投入负载,于 1.7s切除部分负载。由图 5a~图 5c可以看出,并联系统中逆变器2的并入对并联系统交流母线电压没有影响,且在负载突变过程中,逆变器1与逆变器2输出电压几乎不变。而由图5d~图5f可知,并联系统中逆变器1、逆变器2能准确地均分系统负载电流,且在负载突变过程中逆变器1、逆变器2能快速响应这一变化,并重新均分负载。由此可知,采用本文设计的下垂控制策略及下垂控制参数能够使得逆变器并联列车辅助供电系统快速、稳定地响应负载突变过程,并始终保持并联系统输出电压的稳定及对负载电流的均分。
本文在文献[8]的基础上,在其下垂控制策略中加入了逆变器输出有功的积分项,用于减少系统环流,并采用根轨迹法给出了下垂控制器参数。为比较上述改进的优越性,本文通过考察逆变器并联列车辅助供电系统的系统环流,进行基于不带积分项与带积分项下垂控制策略的对比仿真实验。本文中,定义三相逆变器并联系统各相环流为:DIa=(I1a-I2a)/2、DIb=(I1b-I2b)/2、DIc=(I1c-I2c)/2,其中I1a、I1b、I1c、I2a、I2b、I2c分别为逆变器 1、逆变器 2的三相电流。对比实验结果如图6和图7所示,其中图6为采用本文设计的带积分项下垂控制策略的并联系统环流波形,图7为采用文献[8]给出的不带积分项下垂控制策略的并联系统环流波形。对比图 6和图7可知,带积分项下垂控制策略对系统环流的控制性能明显优于不带积分项下垂控制策略;且从各相环流波形比较中可以明显看出,由于积分项的存在系统静态误差得到了较好的消除。由此可知,采用本文设计的下垂控制策略及相应参数,将改善逆变器并联列车辅助供电系统的均流性能。
通过上述仿真实验,验证了采用小信号分析及根轨迹法所确定的下垂控制器参数的有效性,同时也表明,将有功功率的积分项加入系统下垂控制策略中将改善逆变器并联列车辅助供电系统的均流性能。
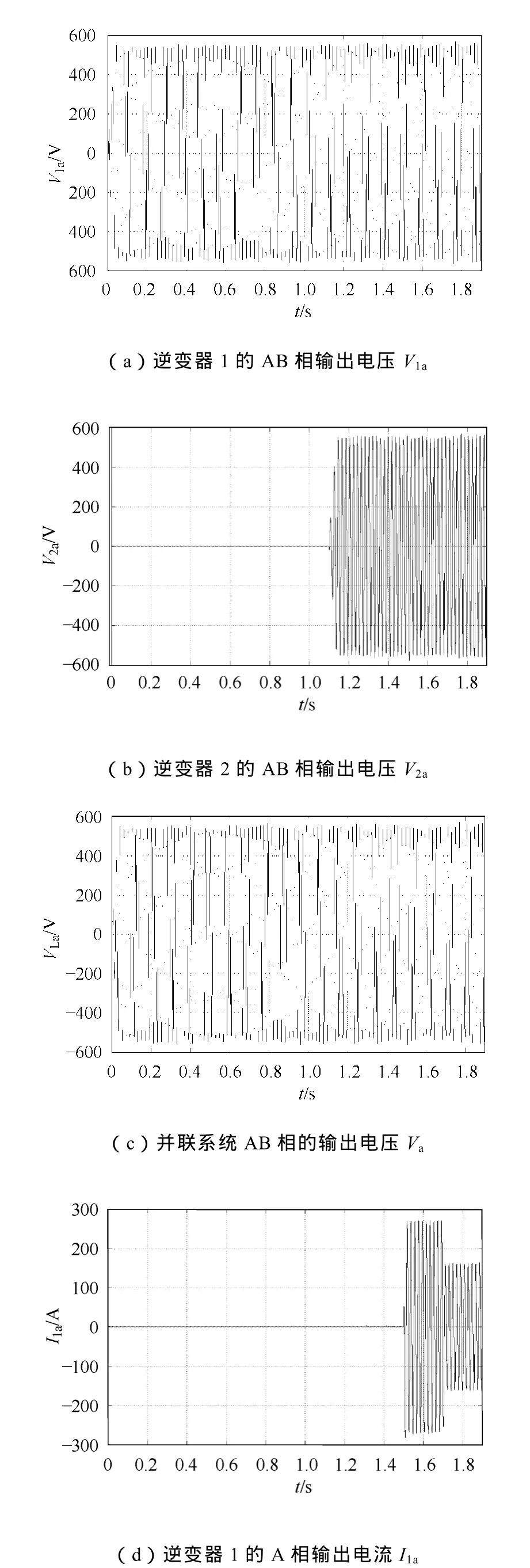
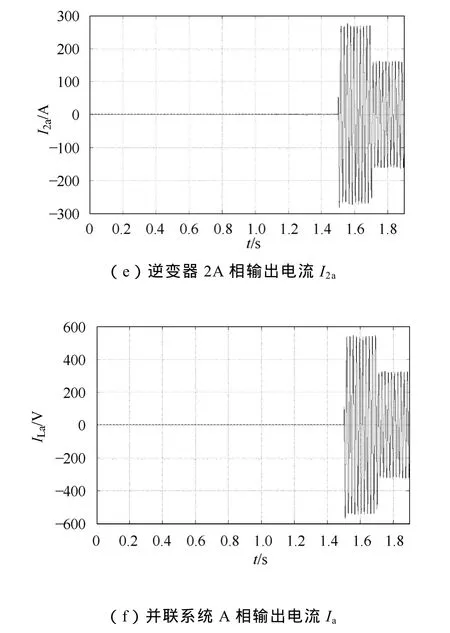
图5 负载突变仿真实验波形Fig.5 Simulation waveforms of system with mutation load
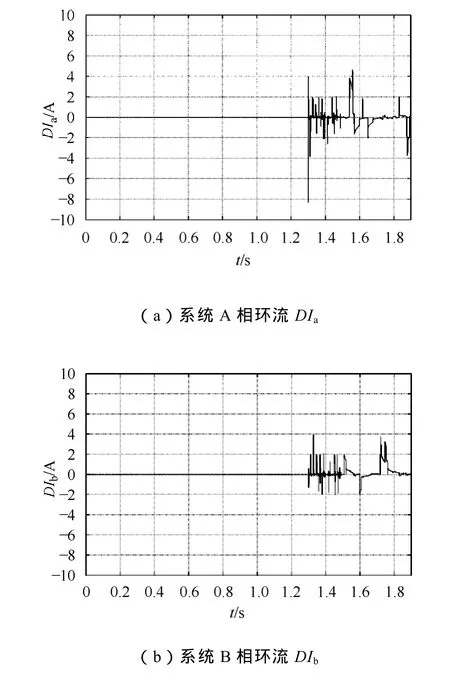
图6 带积分项的并联系统环流波形Fig.6 Waveforms of loop current with integral acting
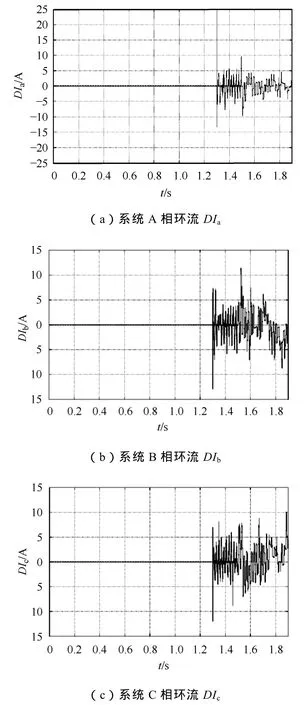
图7 不带积分项的并联系统环流波形Fig.7 Waveforms of loop current with integral absent
5 实验
为了进一步验证上述下垂控制策略及参数在逆变器并联列车辅助供电系统控制中的有效性,本文按图1所示系统结构,进行了两台辅助逆变器并联的实验。实验系统电气参数及控制参数与仿真实验一致,其中逆变器的锁相控制、功率控制、电压外环和电流内环控制由DSP控制器6711D及2812组成的双DSP控制系统来实现。
系统实验过程参照仿真过程的并联系统逆变器启动次序,由逆变器1(INV1)先建立交流母线电压,逆变器2(INV2)再加入并联系统,最后完成逆变器并联列车辅助供电系统空载、带载及负载突变等实验。实验结果如图8所示,其中图8a为逆变器2并入系统时逆变器1、逆变器2的AB相电压波形,逆变器 2启动后在时刻tp并入系统,由图可知,逆变器2的加入并未影响系统的电压波形。图8b为并联系统负载变化时逆变器1、逆变器2的AB相电压波形,系统负载在时刻tL增大,由图可知,系统负载增大时,逆变器1和逆变器2的电压几乎不变,这说明系统输出电压能够快速、稳定地响应负载突变过程。图8c为并联系统负载变化时逆变器1、逆变器2的A相电流波形,由图可知,系统负载增大时,逆变器 1、逆变器 2输出电流同时增大,且保持对系统负载的均分。


图8 系统实验波形Fig.8 Experimental waveforms of system
上述负载突变实验表明采用本文设计的下垂控制策略及下垂控制器参数的逆变器并联列车辅助供电系统能够稳定、快速地响应负载突变过程,且均流效果较好。
6 结论
本文针对采用逆变器并联技术的DC600V列车辅助供电系统,将并联逆变器输出有功功率的积分项加入到系统功率控制环的频率控制函数中。应用小信号分析法构建了系统功率控制环小信号模型,采用根轨迹法分析了下垂控制器参数对系统稳定性及动态性能的影响,并设计了下垂控制器参数。仿真及实验结果均表明所设计的下垂控制器参数及改进后的下垂控制策略提升了列车辅助供电系统的稳定性及动态性能,减少了各并联逆变器之间环流,改善了系统均流性能。
[1] 徐德鸿. 电力电子系统建模及控制[M]. 北京: 机械工业出版社, 2005.
[2] Karel De Brabandere, Bruno Bolsens, Jeroen Van den Keybus, et al. A voltage and frequency droop control method for parallel inverters[J]. IEEE Transactions on Power Electronics, 2007, 22(4): 1107-1115.
[3] 林新春, 段善旭, 康勇. 基于下垂特性控制的无互联线并联UPS建模与稳定性分析[J]. 中国电机工程学报, 2004, 24(2): 33-38.Lin Xinchun, Duan Shanxu, Kang Yong. Modeling and stability analysis for parallel operation of UPS with no control interconnection basing on droop characteristic[J]. Proceedings of the CSEE, 2004,24(2): 33-38.
[4] Mohamed Y A R I, El Saadany E F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids[J]. IEEE Transactions on Power Electronics, 2008, 23(6): 2806-1816.
[5] Josep M Guerrero, Luis Garcia de Vicuna, Jose Matas,et al. A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems[J]. IEEE Transactions on Power Electronics, 2004, 19(5): 1205-1213.
[6] Karel De Brabandere, Bruno Bolsens, Jeroen Van den Keybus, et al. A voltage and frequency droop control method for parallel inverters[J]. IEEE Transactions on Power Electronics, 2007, 22(4): 1107-1115.
[7] 张尧, 马皓, 雷彪, 等. 基于下垂特性控制的无互联线逆变器并联动态性能分析[J]. 中国电机工程学报, 2009, 29(3): 42-48.Zhang Yao, Ma Hao, Lei Biao, et al. Analysis of dynamic performance for parallel operation of inverters without wire interconnections [J].Proceedings of the CSEE, 2009, 29(3): 42-48.
[8] 沈坤, 章兢, 王坚. 基于PQ下垂控制逆变器并联技术的列车辅助供电系统研究[J]. 电工技术学报,2011, 26(7): 223-229.Shen Kun, Zhang Jing, Wang Jian. Research on train auxiliary power system based on PQ droop control inverter parallel technology [J]. Transactions of China Electrotechnical Society, 2011, 26(7): 223-229.
[9] 徐林云. DC 600V列车供电系统[J]. 铁道车辆, 2001,39(3): 13-17.Xu Linyun. The DC 600V power supply system on train[J]. Rolling Stock, 2001, 39(3): 13-17.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
防爆电机(2020年5期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
通信电源技术(2016年5期)2016-03-22
