
错位式双边型永磁直线同步电机优化设计
2013-01-16 00:58卢琴芬张新敏黄立人叶云岳
电工技术学报 2013年11期
卢琴芬 张新敏 黄立人 叶云岳
(浙江大学电气工程学院 杭州 310027)
1 引言
随着科技的进步,越来越多的加工设备如数控机床、半导体加工设备等需要采用高精度、高速度、高加速度、高效节能和环保的驱动系统,而直线电机直驱技术为这类系统提供了一种有效的解决方案,因为它可以直接产生直线运行方向的驱动力,而不需要齿轮、皮带等中间传动机构,极大地提高了驱动系统的效率,其中应用较多的是高加速度与高推力密度的永磁直线电机[1-6]。
在永磁直线电机多种结构中,单边型应用较多,优点是推力密度高,但缺点是法向力很大,数值上可能是额定推力的十几倍。为了能够承受这个法向力,需要增强负载平台的机械强度,从而导致移动平台的质量和体积大大增加。双边型结构则能够有效地解决这个问题,而且在减小推力波动方面还具有更好的优势,因为它不仅可以采用分数槽、斜槽、斜极、结构优化和控制补偿方法等常用的推力波动抑制措施[7-12],还能够采用电枢错位或磁极错位等方法进一步减小推力波动[7]。
本文根据文献[7]槽极数配合和绕组结构的研究,以12槽/11极的双边型所有齿绕绕组结构作为研究对象,建立参数化有限元模型,优化其结构参数,两侧电枢铁心(或两侧磁极)错开的距离,并由样机验证了仿真结果。最后,还与另外两种极数比槽数多的槽极数配合(12槽/13极、12槽/14极)双边型结构电机进行了对比。
2 电机结构
图1是额定推力为1 000N的12槽/11极双边型水冷永磁直线电机及电枢水冷系统。 动子包括短电枢(叠片式铁心和全齿式绕组)和水冷系统,两侧电枢绕组并联;定子为两侧长磁极。

图1 12槽/11极双边型水冷永磁直线电机示意图Fig.1 The diagram of 12-slot/11-pole double-sided permanent magnet linear motor with water-cooling
水冷系统的铜管安装在两个电枢铁心中间,进出口固定在同一侧。两侧电枢铁心独立制造,再放入水冷系统进行拼装,水冷管道必须与铁心紧密贴合,或者采用导热性能良好的材料进行填充。
3 结构优化
电机的力性能与结构紧密相关,需要对主要的结构参数如槽宽、槽深、电枢铁心长度和厚度、永磁体宽度和厚度、气隙长度进行优化,才能最大限度地削弱推力波动,并提高推力密度。为了加快优化过程,采用逐个单独优化的方法,当某个参数优化时其他结构参数保持不变,当该参数确定后就保持不变。在优化过程中,保持电流密度为6A/mm2,速度为额定值2.28m/s。图2显示了平均推力和推力波动(峰峰值)与槽宽、槽深之间的关系。推力性能受槽宽/槽距的影响较大,当槽宽/槽距的值为0.622时,平均推力满足设计要求,同时推力波动达到最小值。而平均推力和推力波动与槽深近似成正比例关系,考虑到电机机械强度、磁饱和等影响,两侧铁心

图3显示电枢铁心的最佳长度为266mm,其长度是通过电枢两端端部齿的宽度来调整的。相对于电枢铁心长度,其宽度对电机推力性能影响则较小。

图3 电枢铁心长度、宽度对电机推力的影响Fig.3 The influence of armature core length and width on motor thrust force performance
永磁体的结构和性能对推力性能和电机成本至关重要,其宽度决定了气隙磁通的分布特性,其厚度直接影响直轴电抗与气隙磁通的大小。图4显示了永磁体宽度、厚度与电机推力的关系曲线。兼顾到系统成本和推力性能,永磁体的宽度和厚度分别选为20mm和6mm。

图4 永磁体宽度、厚度对电机推力的影响Fig.4 The influence of permanent magnet width and thickness on motor thrust force performance
气隙长度对磁场分布和推力性能具有十分显著的影响,图5显示了推力与气隙长度的关系。从电磁上看,气隙长度越小,平均推力越大,但推力波动也随之增加,再综合考虑到加工精度,0.8mm比较适合。

图5 气隙长度与推力的关系Fig.5 The relationship between air gap length and thrust force
由于槽宽、电枢铁心长度以及永磁体宽度对电机性能影响比较大,在经过单独参数优化之后,又对这3个参数进行整体优化,它们的最优值与单独优化时相同,表明该参数已达到全局最优。优化后的样机方案结构参数见表 1,电枢铁心、背铁和永磁体的材料分别是50W470、10号钢和NdFe35。
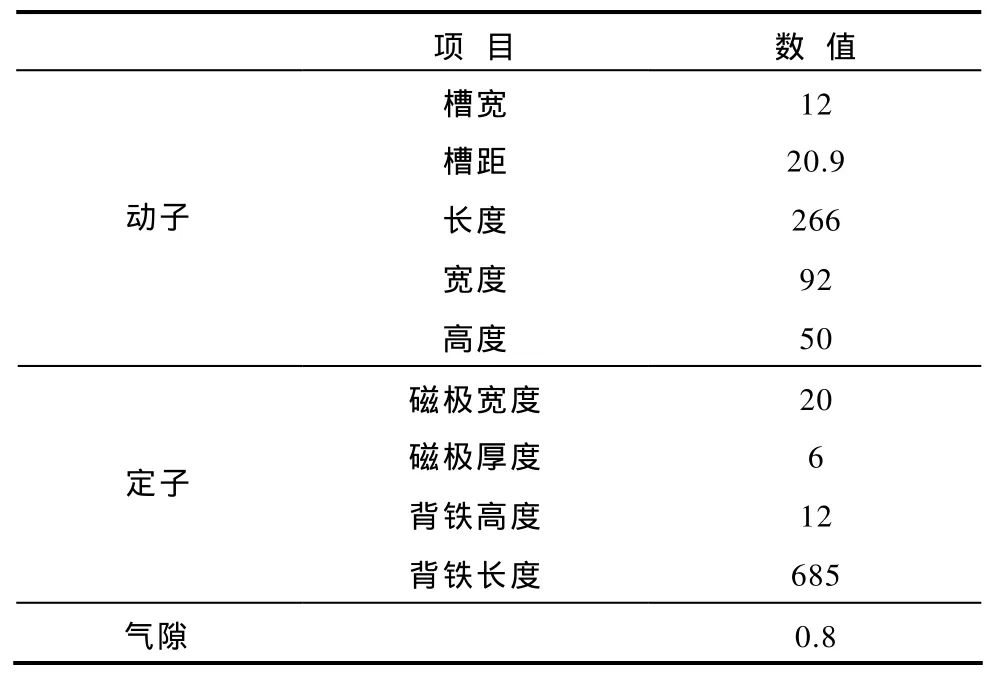
表1 优化方案结构参数Tab.1 Main structural parameters of optimal design(单位:mm)
4 错位距离优化
该双边型结构两侧磁路独立,可以看作由两个单边型结构拼装而成,如果能够使电机两侧产生的推力波动相互抵消,则可以有效地降低电机的推力波动。由于推力波动与电机的端部及齿槽位置相关,只要把电机两侧的电枢铁心或磁极错开一个合适的距离就可以实现。当两侧磁极在水平方向上相互错开一定较小的距离时,两侧电枢铁心在水平方向对齐;当两侧电枢铁心在水平方向上相互错开一定较小的距离时,则两侧磁极在水平方向对齐。两种错位方式效果相同。错位的最优距离可通过有限元分析来确定。
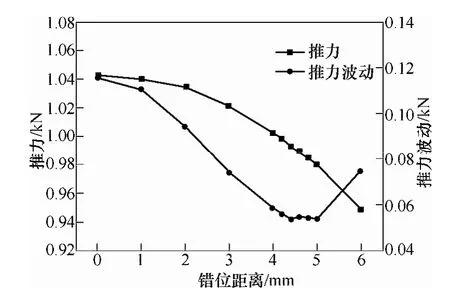
图6 推力特性与错位距离之间的关系Fig.6 Variation of average thrust force and thrust ripple with the shifted distance
图6显示了两侧电枢并联后电机推力性能与错位距离之间的关系。结果显示,随着错位距离的增大,平均推力随之减小,而推力波动则是先减小再增加。当错位距离为 4.4mm 时,推力波动/平均推力的值最小,且平均推力也符合设计要求。此时,尽管平均推力比不错位时减少了 4.81%,但是推力波动则减少了53.9%。显然,该错位方法非常有效,能够在保证平均推力基本不变的条件下,极大地抑制推力波动,非常适合于双边型结构。
如果两侧电枢绕组不并联,而采用两套不同相位的电源来控制,则性能优于前面并联方案,不仅可以使推力波动大大减小,而且平均推力基本不变。两套电源之间相位差θ需满足

式中L——错位距离;
τ——极距。
图7显示了三种不同结构之间的平均推力与推力波动。三种方案都采用表1中的结构参数,方案1是不错位结构,方案2是电枢铁心错位4.4mm的结构(电枢绕组并联),方案3则是在方案2结构的基础上,两侧电枢绕组分别采用一套电源供电。
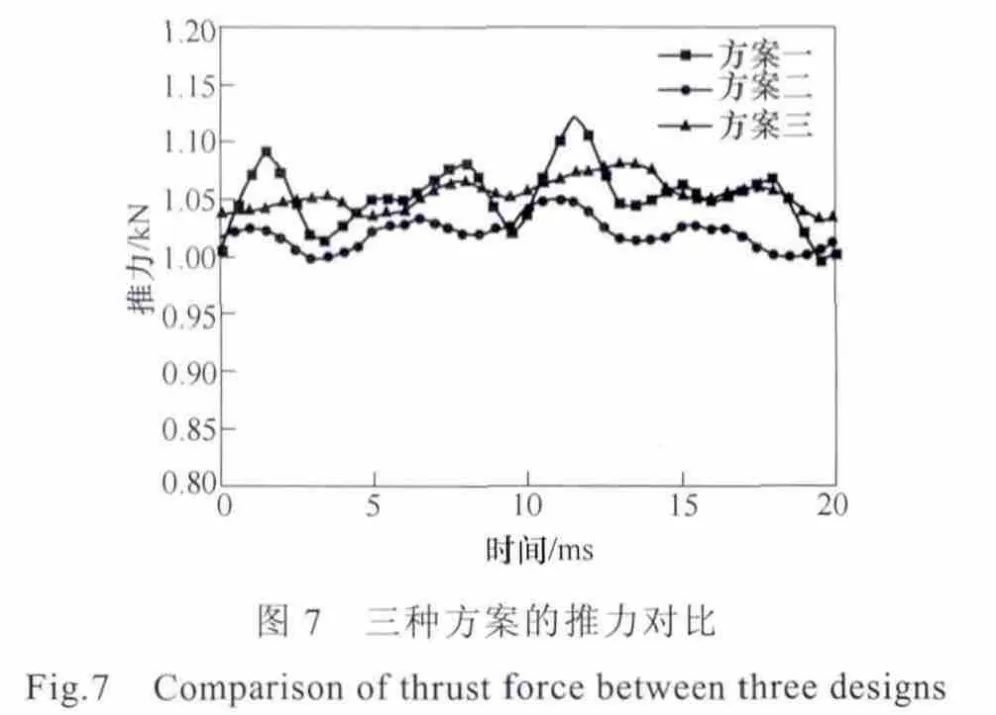
由图7可见,方案2相对于方案1平均推力略有减小,但推力波动降低更多。而方案3则具有更优越的推力性能,不仅推力波动大大减小,而且平均推力与不错位时基本相同,是三种结构中性能最好的,缺点是成本太高,需要提供两套变流系统。为了节约成本,本文选择方案2作为最终方案,并制造样机,其平均推力为992N,推力波动(峰峰值)为 53N。方案 1的法向力基本为零,而方案 2为227.8N,这是由于错位造成的结构不对称而引起的。虽然存在法向力,但其远远小于单边型永磁直线电机,对电机的机械强度要求降低。
与相应的单边型优化结构相比较,12槽/11极双边型结构单位长度上永磁体的用量比单边结构多6.8%,而电枢铁心的用量减少17%;双边型结构的推力波动与平均推力的比值是 5.36%,但单边结构电机是11.33%;此外,双边结构的法向力仅为单边结构的 3.46%。也就是说,与单边型结构相比,该12槽/11极电枢错位的双边型永磁直线电机的永磁材料用量稍微增加,但铁心材料大大减少,并且推力和法向力的性能显著提升。因此,该方案具有广阔的应用前景。
5 电机性能
5.1 空载运行
图8显示了最终方案在空载运行时的推力、法向力、反电动势和磁链变化。空载时,推力即为定位力,由齿槽力和边端力构成。由于电枢铁心错位,定位力相对较小,其峰峰值是 60.3N。法向力的平均值和峰峰值分别是2.36N,123.17N。反电动势和磁链波形接近正弦,有利于产生平稳的推力性能。


5.2 额定运行
图9显示了在额定负载运行时,最终方案的磁场分布,磁链变化和反电动势波形。磁链和反电动势波形接近正弦。表2为功率因数、效率及推力等额定参数。

图9 最终方案的额定负载运行性能Fig.9 Performance of final design at rated load
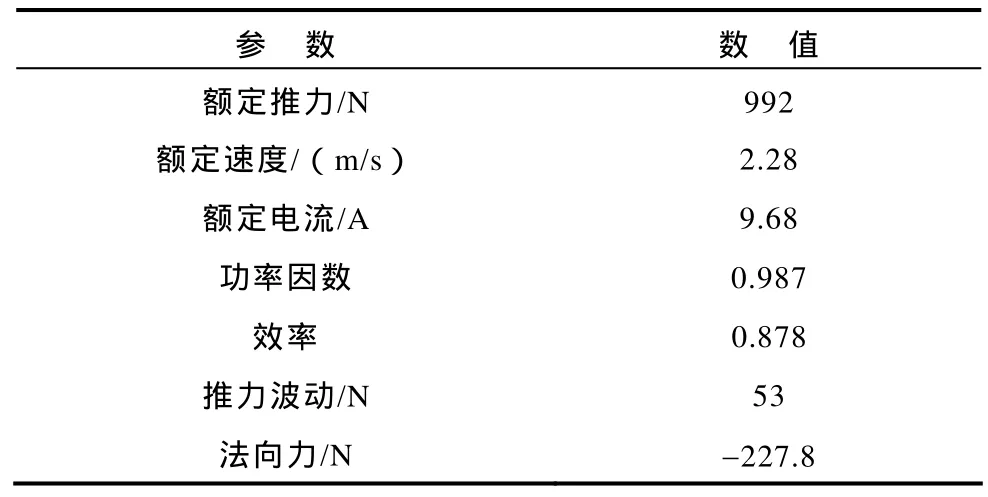
表2 电机额定参数Tab.2 Motor rated parameters
经过空载和额定负载分析,该电机采用电枢错位方案表现了良好的性能,尤其是优越的推力性能,表明该方法的可靠性。
5.3 样机与实验
样机和实验平台如图10所示,测得的空载反电动势波形如图11所示,由图可见,在速度为0.2m/s时,测得的反电动势幅值为 10.3V,可以推得额定速度2.28m/s下的反电动势实际幅值为117.42V,与有限元计算值 126V非常接近。误差主要来源于样机的加工精度,样机实际气隙长度为1mm, 比设计值0.8mm要大。通过有限元分析,气隙的增大将使空载反电动势的幅值减少5V。因此,有限元计算值与实际值是一致的,表明有限元模型及结果的有效性。

6 极数增加方案
双边型永磁直线同步电机采用全齿绕组,在极数比槽数少时,12槽/11极是优选的方案,因此样机选择该槽极配合。实际上,极数也可以比槽数多,可选择为13极或14极,并结合文中的错位方案来减小推力波动。样机与这两种极数(12槽/13极与12槽/14极)的双边型永磁直线同步电机进行了对比。对比的三种方案在保持初级槽距与次级极弧系数不变的情况下,首先对三种电机的初级长度进行优化调整,使推力波动降低至最小,然后再优化错位距离。
图 12显示了这三种方案的平均推力和推力波动与错位距离的关系曲线。结果表明,在平均推力基本保持不变的情况下,错位方案对不同槽数/极数的双边型直线电机的推力波动都具有很好的抑制作用,能够广泛应用于各类双边型直线电机。而且在满足推力要求情况下,以推力波动/平均推力的比值最小为目标,这三种结构的最佳错位距离都为4.4mm,可见,错位距离主要取决于初级结构。

图12 三种槽极数配合电机的平均推力与推力波动Fig.12 Average thrust force and thrust ripple of three motors with different slot/pole combinations
表3比较了这三种电机在错位前和错位后的推力性能。可以看出,在错开相应的最佳距离时,推力波动减小的百分比远大于平均推力减小的百分比。尽管随着极数的增大,平均推力减少的百分比增加,但推力波动减少的百分比增加得更快,因此从推力波动/推力的比值来说,极数比槽数大的槽极配合力性能更好,即12槽/14极的力性能更优。

表3 推力性能比较Tab.3 Thrust force performance comparison
7 结论
本文研究了电枢错位或磁极错位的12槽/11极双边型永磁直线电机,得到了优化结构,制作了样机并进行了实验测量。研究表明,采用电枢铁心或磁极错位的方法,可以显著抑制12槽/11极双边型永磁直线电机推力波动,而平均推力只是略微变小。该方法具有通用性,同样适用于12槽/13极,12槽/14极的双边型永磁直线电机,而且随着电机极数的增大,推力波动/平均推力的比值减小,即12槽/14极力性能更优。三个方案最佳错位距离相同,因此最佳错位距离取决于电机的电枢结构及参数。
[1] 叶云岳. 直线电机原理与应用[M]. 北京: 机械工业出版社, 1999.
[2] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2008.
[3] Tavana N R, Shoulaie A. Pole-shape optimization of permanent-magnet linear synchronous motor for reduction of thrust ripple[J]. Energy Conversion and Management, 2011, 52(1): 349-354.
[4] Xi Neng, Yang Jiajun, Liu Wenwei, et al. A novel approach of thrust ripple minimization by combinational iron-cored primary in permanent magnet linear synchronous motor[J]. Applied Mechanics and Materials, 2012, 190-191: 638-641.
[5] Hwang C C, Li P L, Liu C T. Optimal design of a permanent magnet linear synchronous motor with low cogging force[J]. IEEE Transactions on Magnetics,2012, 48(2): 1039-1042.
[6] Li Liyi, Ma Mingna, Kou Baoquan, et al. Analysis and design of moving-magnet-type linear synchronous motor for electromagnetic launch system[J]. IEEE Transactions on Plasma Science,2011, 39(1): 121-126.
[7] 卢琴芬, 程传莹, 叶云岳, 等. 每极分数槽永磁直线电机的槽极数配合研究[J]. 中国电机工程学报,2012, 32(36): 68-74.Lu Qinfen, Cheng Chuanying, Ye Yunyue, et al.Slot/pole number combination research of PM linear motors with fractional slots per pole[J]. Proceedings of the CSEE, 2012, 32(36): 68-74.
[8] Zhu Yuwu, Lee Sanggeon, Cho YunHyun. Topology structure selection of permanent magnet linear synchronous motor for ropeless elevator system[C].IEEE International Symposium on Industrial Electronics (ISIE), 2010: 1523-1528.
[9] Tan K K, Huang S N, Lee T H. Robust adaptive numerical compensation for friction and force ripple in permanent-magnet linear motors[J]. IEEE Transactions on Magnetics, 2002, 38(1): 221-228.
[10] Min W, Chen J T, Zhu Z Q, et al. Optimization and comparison of novel E-core and C-core linear switched flux PM machines[J]. IEEE Transactions on Magnetics, 2011, 47(8): 2134-2141.
[11] Kou Baoquan, Huang Xuzhen, Wu Hongxing, et al.Thrust and thermal characteristics of electromagnetic launcher based on permanent magnet linear synchronous motors[J]. IEEE Transactions on Magnetics, 2009, 45(4): 358-362.
[12] 王昊, 张之敬, 刘成颖. 永磁直线同步电机定位力分析与实验研究[J]. 中国电机工程学报, 2010,30(15): 58-63.Wang Hao, Zhang Zhijing, Liu Chengying. Detent force analysis and experiment for permanent magnet linear synchronous motor[J]. Proceedings of the CSEE, 2010, 30(15): 58-63.
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
防爆电机(2021年3期)2021-07-21
奥秘(创新大赛)(2020年10期)2020-10-28
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
微特电机(2019年2期)2019-02-25
中国环境监察(2017年8期)2017-10-23
新高考·高一数学(2016年3期)2016-05-19
电测与仪表(2016年18期)2016-04-11

- 电工技术学报的其它文章
- 新型并列式混合励磁无刷直流电机结构原理及其磁场调节特性