误差椭圆搜索法EES固定GNSS整周模糊度
2013-04-07 07:46张晶晶程鹏飞蔡艳辉
测绘通报 2013年8期
张晶晶,程鹏飞,蔡艳辉,沈 楠
(中国测绘科学研究院,北京 100039)
一、引 言
整周模糊度的固定问题一直是GNSS精密定位和实时动态定位的关键,也是网络RTK动态定位的关键[1-2]。国内外学者在整周模糊度的确定方面作了很多研究。目前,使用最多、理论最成熟的是LAMBDA方法(最小二乘模糊度降相关方法)。P J G Teunissen在1993年提出了LAMBDA方法,之后他就LAMBDA方法的整数降相关、搜索策略、模糊度搜索成功率,以及模糊度固定理论等方面作了深入完整的研究[3-4]。LAMBDA方法固定整周模糊度的步骤主要分为整数降相关和整周模糊度的搜索。De Dong等对LAMBDA方法的具体实现给出了详细的说明[5]。而后的学者不断发展和改进了LAMBDA方法:一部分学者对LAMBDA方法的整数降相关技术进行了改进;还有一部分学者改进了LAMBDA方法中模糊度的搜索策略[6-7]。X Yang等提出了同时改进整数降相关技术和整周模糊度搜索技术的改进 LAMBDA 方法 (MLAMBDA)[8]。MLAMBDA 方法降低了计算机计算复杂度,用时更少,适用于高维模糊度固定的方法。
但是,LAMBDA方法及后来改进的各种LAMBDA方法都是以整数矩阵降相关为基础的,而整数降相关只能使得方差阵更加对角化,不能保证对角线元素在一个量级,从而不能保证搜索的区域接近球形,显然不是理想状态。而实数矩阵作为转换矩阵时的优势是:只要设定要达到的理想状态,都可以通过实数转换矩阵达到,而且过程是可逆的。因此,EES方法采用实数矩阵进行降相关,从而进行整周模糊度的确定。
二、EES固定整周模糊度的原理
参数之间的方差-协方差矩阵决定了一个误差椭圆,误差椭圆长轴的指向和误差椭圆的大小决定了模糊度备选项的分布,进行模糊度搜索时最理想的情况就是使误差椭圆既可以包含模糊度的正确值,同时可以减少搜索次数和搜索中断次数,以最小的范围找到正确的整周模糊度。一般原始的误差椭圆并不具有这些优良的性质,可以通过实数矩阵变换,将原来参数之间的误差椭圆转换到理想的误差椭圆,以缩小搜索范围、提高搜索的成功率。
1.方差-协方差矩阵决定的最佳误差椭圆
假设模糊度实数解之间的方差-协方差矩阵如下

根据Qa,计算误差椭圆的要素[9]:
误差椭圆的长半轴

误差椭圆的短半轴

误差椭圆的长轴指向

假设x0、y0是模糊度的实数解,为了方便书写,设误差椭圆的长轴指向偏离X轴角度为α(φE=α),那么原始坐标系下误差椭圆的一般方程为

那么误差椭圆上任意一点的斜率为



则这个椭圆的外切矩形的长和宽为

为了减少搜索范围,需要椭圆两条0°切线之间的距离与两条90°切线之间的距离近似相等,此时椭圆的外切四边形是正方形。这样一来就不会出现某个方向的备选项很多,备选项在各个方向的分布比较均匀,缩小了搜索空间。



因此要使误差椭圆各个方向搜索的备选项大致相等,最佳误差椭圆的长轴指向应该为45°。
2.最佳误差椭圆的计算
令所求的最佳误差椭圆的方差-协方差矩阵为

误差椭圆要素的计算同上一节。
所求的最佳误差椭圆会降低模糊度之间的相关性,分析LAMBDA方法可以得到降相关之后方差协方差应该满足

那么模糊度之间的相关性因子为

在搜索过程中,设置ρ的值为(-0.5,+0.5)之间的任意一个值,则需要求的是a、b的大小。
由最佳误差椭圆的指向可知

将QEE的计算公式代入上式,可得a=b。
至此,两个模糊度之间的最佳误差椭圆应该满足:两个模糊度的方差相等(即a=b),方差之间的相关性在(-0.5,+0.5)之间。
3.最佳误差椭圆固定整周模糊度原理
为了使三维模糊度搜索时误差椭球近似接近球形,不出现某些方向过于扁长,造成模糊度搜索的数量增多,最好使得Q矩阵的对角线元素对角线上的元素差不多都在一个量级,对角线元素之间互差不超过0.5。
三维模糊度变换时,每次两两之间搜索一个最佳误差椭圆,如按照(N1,N2)、(N2,N3)、(N3,N1)的顺序,会出现下一次的变换打破上一次变换的情况,如(N2,N3)变换完之后打破了原来(N1,N2)的变换。这种情况影响不大,等到3个模糊度都变换一轮之后,如果Q对角线不满足互差小于0.5的要求,继续按照上述变换顺序进行变换,直至对角线元素满足要求。最多需要两轮变换就能找到满足要求的Q。
Q是通过原始的方差-协方差矩阵,按照最佳误差椭圆的算法直接得到的。为了搜索整周模糊度,假设Qa到Q的整个过程是通过实数转换矩阵K实现的,实数转换矩阵K不仅完成了最佳误差椭圆的搜索,而且还降低了模糊度之间的相关性。

由于Q、Qa都是对称矩阵,而且已知,都有唯一的LTL分解,所以可以很方便地求出K矩阵。
经过实数矩阵K降相关之后,为了减少搜索时的中断,需将Q对角线上的元素按照从大到小的顺序排列[5]。经过实数降相关的方差阵的对角线元素也要按照从大到小的顺序排列,这需要单位矩阵变换IT(整数矩阵)来完成。最终转换后的矩阵QZ为

这么做的好处是省去了整数变换过程的复杂,而且I的行列式的值就是1。

4.EES最终确定的整周模糊度
搜索到整数矩阵z之后,那么原始数据对应的模糊度应该为

式中,Zamb是实数,取最接近Zamb的整数作为最终的整周模糊度。
5.EES方法有效性的评价
利用成功率[5-6]来判断整周模糊度是否固定得准确。成功率越高,搜索的整周模糊度的可信度就越高,就越接近真实的整周模糊度,成功率能反映是否提高了整数解的准确性[6,10]。成功率的计算公式[6]为

三、试验分析
可通过试验来验证EES方法是否是一种有效可行的固定整周模糊度方法。以下选择两条基线的实际观测数据进行说明:基线1(BaseLine1)数据的采样率为30 s,基线长度为31.749 45 m;基线2(BaseLine2)的采样率为15 s,基线长度为2433.565 m。试验中设定EES的相关性参数ρ为0.4、0.3、0.2这3种情况。
1.LAMBDA方法和EES方法固定模糊度成功率的比较
从试验得到的数据和图1、图2可以看出:
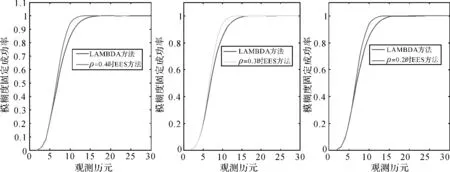
图1 BaseLine1使用LAMBDA方法和EES方法固定历元的整周模糊度的成功率比较

图2 BaseLine2使用LAMBDA方法和EES方法固定历元的整周模糊度的成功率比较
1)对于 BaseLine1和 BaseLine2,ρ=0.4、ρ=0.3、ρ=0.2时EES方法模糊度固定的成功率都明显高于LAMBDA方法。BaseLine1的基线长度比较短,EES的成功率从第7个历元开始明显高于LAMBDA方法,而且EES方法在18个历元的时候成功率已经达到1。而LAMBDA方法在第24个历元才达到1。因此EES方法比LAMBDA方法提前搜索到正确的整周模糊度。
2)BaseLine2的长度比BaseLine1长很多,因此随着基线长度的增加,EES的优势体现得更明显,从第4历元开始,EES的成功率就高于LAMBDA方法10%以上,直到第18历元的时候,成功率提高了近30%,已经达到了97%,而LAMBDA方法此时的成功率只有70%左右。因此EES方法搜索到正确整周模糊度需要的历元数比LAMBDA方法少。
2.LAMBDA方法和EES方法降相关效果的比较
从图3明显可以看出,EES方法降相关之后的对角线元素的最大值与最小值的比值都在10以内,远远小于LAMBDA方法处理的结果,说明经过EES处理过的对角线元素在一个量级,搜索空间更加接近球形。造成这种明显差异的原因是,LAMBDA方法通过整数转换矩阵进行降相关,虽然可以使得方差阵更加对角化,但是并不能保证方差阵对角线元素在一个量级,进而可能使得搜索的空间有些扁长;而EES采用实数矩阵降相关,可以达到各种设定的理想状态,使得降相关之后的方差阵的对角线元素几乎在一个量级之上。
3.ρ取不同值对EES方法成功率的影响
从表1可以看出,只要将ρ设置在0.5以内,EES方法的成功率和固定基线解的精度都高于LAMBDA方法。从表1还可以看出,尽管成功率差距不是很大,但是很大程度上ρ=0.4的成功率高于ρ=0.3和ρ=0.2,因此并不是ρ越小效果越好。
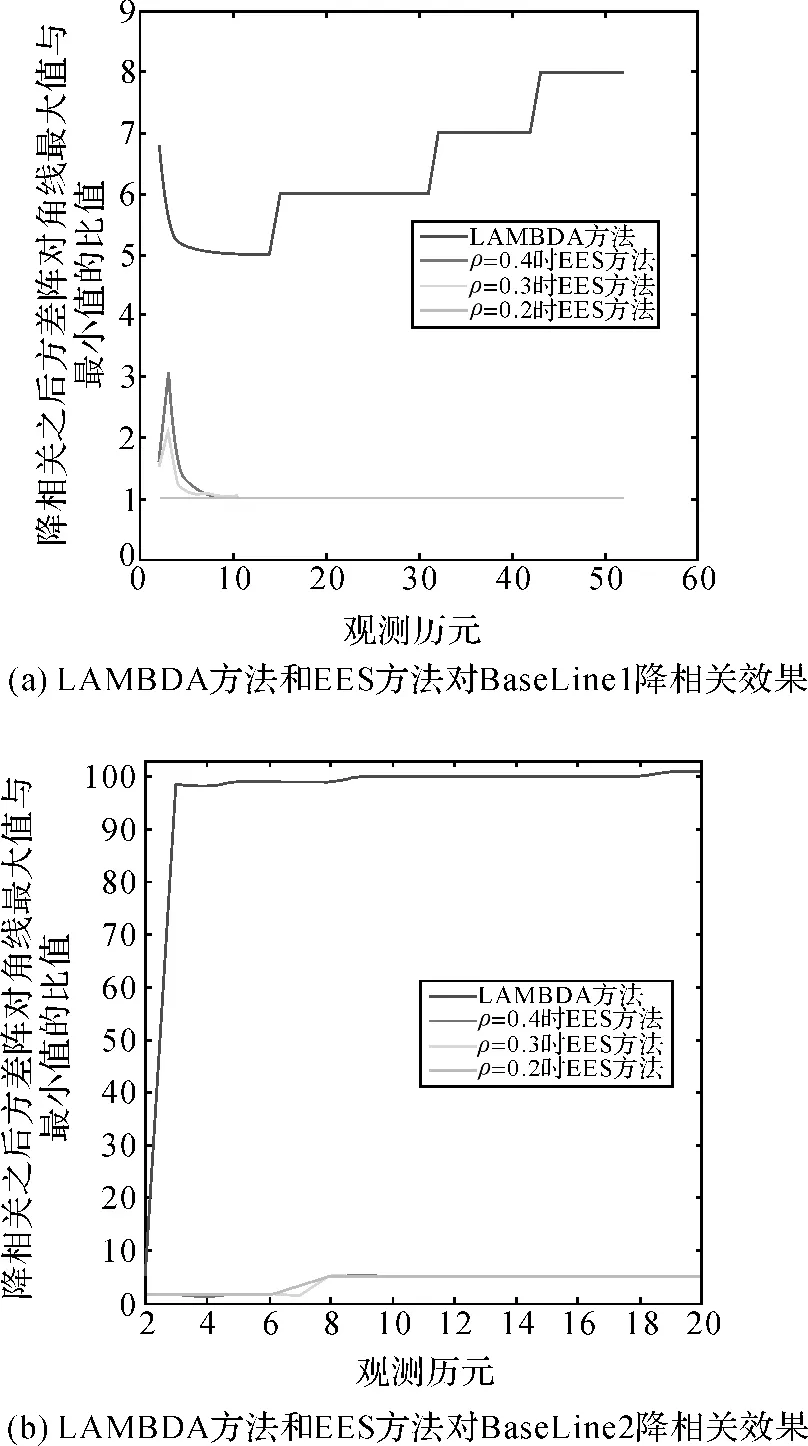
图3 LAMBDA方法和EES方法降相关效果的比较

表1 不同参数情况下EES模糊度固定成功率的比较

续表1
四、结 论
1)试验证明,通过实数矩阵变换的EES方法是一种切实有效的固定整周模糊度的方法。EES方法使搜索空间更加接近球形,成功率高于LAMBDA方法。而且EES方法搜索到整周模糊度所需要的历元数少于LAMBDA方法。
2)随着基线长度的增加,EES方法固定整周模糊度的成功率明显高于 LAMBDA方法,EES和LAMBDA方法固定模糊度的成功率都和观测的时间长短有关系,时间越长效果越好。但EES方法达到90%以上成功率的用时更短,模糊度的固定效果会更好,搜索到正确的整周模糊度EES方法需要的历元数更少。
3)EES方法中不同ρ值的设置对精度和成功率有影响,总体来说只要ρ的值设置在(-0.5,+0.5)之间,基线的精度和模糊度固定的成功率相差不大,但是并不是ρ越小效果越好,一般取0.3~0.4。
4)LAMBDA方法虽然达到了降相关的效果,方差谱也相对平滑,但是有时对角线元素的数值量级相差较大,造成搜索空间某个方向有些扁长;而EES方法在降相关的同时,使得对角线元素的数量级相差更小,几乎是在同一量级。
目前对EES方法的研究还在低维,高维的EES方法有待进一步的研究。
[1] 祝会忠,刘经南,唐卫明,等.长距离网络RTK基准站间整周模糊度单历元确定方法[J].测绘学报,2012,41(3):359-365.
[2] 高星伟,刘经南,葛茂荣.网络RTK基准站间基线单历元模糊度搜索方法[J].测绘学报,2002,31(4):305-309.
[3] TEUNISSEN P J G.The Affine Constrained GNSS Attitude Model and Its Multivariate Integer Least-squares Solution[J].Journal of Geodesy,2012,86(7):547-563.
[4] TEUNISSEN P J G.Least Squares Estimation of the Integer GPS Ambiguities.[C]∥Invited Lecture,Section IV Theory and Methodology,IAG General Meeting.Beijing:IAG,1993.
[5] JONGE P P,TIBERIUS C.The LAMBDA Method for IntegerAmbiguity Estimation:Implementation Aspects[M].Delft:Delft University of Technology,1996.
[6] 周扬眉.GPS精密定位的数学模型、数值算法以及可靠性理论[D].武汉:武汉大学,2003.
[7] 高成发,赵毅,万德钧.用LAMBDA改进算法固定GPS整周模糊度[J].武汉大学学报:信息科学版,2006,31(8):744-747.
[8] CHANG X W,YANG X,ZHOU T.MLAMBDA:A Modified LAMBDA Method for Integer Least-squares Estimation[J].Journal of Geodesy,2005,79(9):552-565.
[9] 武汉法学测绘学院测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003.
[10] 李淑慧,刘经南.整周模糊度搜索方法的效率比较和分析[J].测绘通报,2003(10):1-3.
猜你喜欢
测绘学报(2022年5期)2022-05-31
语数外学习·初中版(2022年3期)2022-05-25
语数外学习·初中版(2020年2期)2020-09-10
中国惯性技术学报(2020年2期)2020-07-24
中学生数理化·七年级数学人教版(2018年3期)2018-05-30
中学生数理化·中考版(2017年3期)2017-11-09
中学生数理化·八年级数学人教版(2016年2期)2016-04-13
中学生数理化·八年级数学人教版(2016年3期)2016-04-13