多基站逐次逼近定位算法研究
2013-04-07 07:46向泽君邓剑锋
测绘通报 2013年8期
向泽君,郭 鑫,吕 楠,邓剑锋
(1.重庆市勘测院,重庆 400020;2.重庆邮电大学光纤通信重点实验室,重庆 400065)
一、引 言
配备有GPS时钟同步和智能天线设备的3G基站要比GSM基站获取到的定位信号测量值精度高[1],但在较差无线定位环境中,很多地点却不能保证3个以上3G基站可见。因此,利用混合基站所获取的定位参量进行定位计算就显得十分重要。另外,定位信号参量的获取易受非可视路径传播、多径传播[2]、网络远近效应[3]等因素的干扰,使得TOA、TDOA参量出现了超量时延,所测AOA并非真实的MS到基站(base station,BS)的入射波。此时,如果采用基于LOS的位置估计算法,其所求定位精度必然降低。
近年来,已有学者探讨在混合网络环境中,应用筛选后的参量进行位置估算的定位问题。罗竣友等[4]提出了基于混沌优化的无线定位算法;文献[5—6]讨论了无线网络TOA/AOA定位方法,还对其算法进行了仿真试验;文献[7]探讨了异构网络中的定位算法,并在GSM/WCDMA网络环境下进行了测试。以上文献的研究成果在一定程度上都能解决移动终端定位问题,但它们的定位方法普遍存在复杂定位环境下定位信息获取不足、NLOS误差较大时定位精度下降较快、终端移动性对算法精度影响较大等弊端。
针对上述问题,本文提出了一种混合TDOA/AOA逐次逼近的定位算法,可在异构网络环境中实现空间定位,并以单反射圆盘统计信道为模型[8],在不同环境中对本文算法进行仿真。仿真结果表明,该算法能够获得更高的定位精度,具有很高的使用价值。
二、逐次逼近定位算法分析


图1 MS与BS之间LOS(NLOS)传播
把满足LOS传播条件的TDOA/AOA参量作为初始测量值,组合C3i个迭代入下文TDOA/AOA最小二乘混合定位算法中,所求结果即形成一个用于逼近的最佳位置估计区域。最后根据坐标投影变换原理将估算出的空间终端位置(≥2)映射到二维平面,求此区域的最小包容圆圆心。这样,就可对移动终端准确位置进行逼近,经空间坐标系反变换得到最终终端位置。
1.测量误差模型
由于接收信号基站BSi在空间随机分布,定位模型中含有测量误差、系统误差[9],终端与各BSi的TOA测量值可表示为

各 BSi到 BS1的距离差 TDOAi,1可表示为

对于信号到达方向AOA,若第k个BS的天线阵列或智能天线接收到来自于MS的定位请求信号,则AOA测量方位角θk、俯仰角φk可表示为

2.TDOA/AOA最小二乘混合定位算法
假设GSM/3G混合通信网络中,有M个BSk从MS发出的上行信号得到AOA,N个BSi从MS端得到的TDOA测量值。TDOA伪线性双曲线方程为
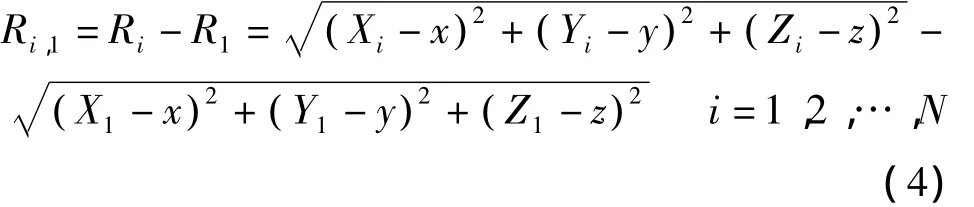
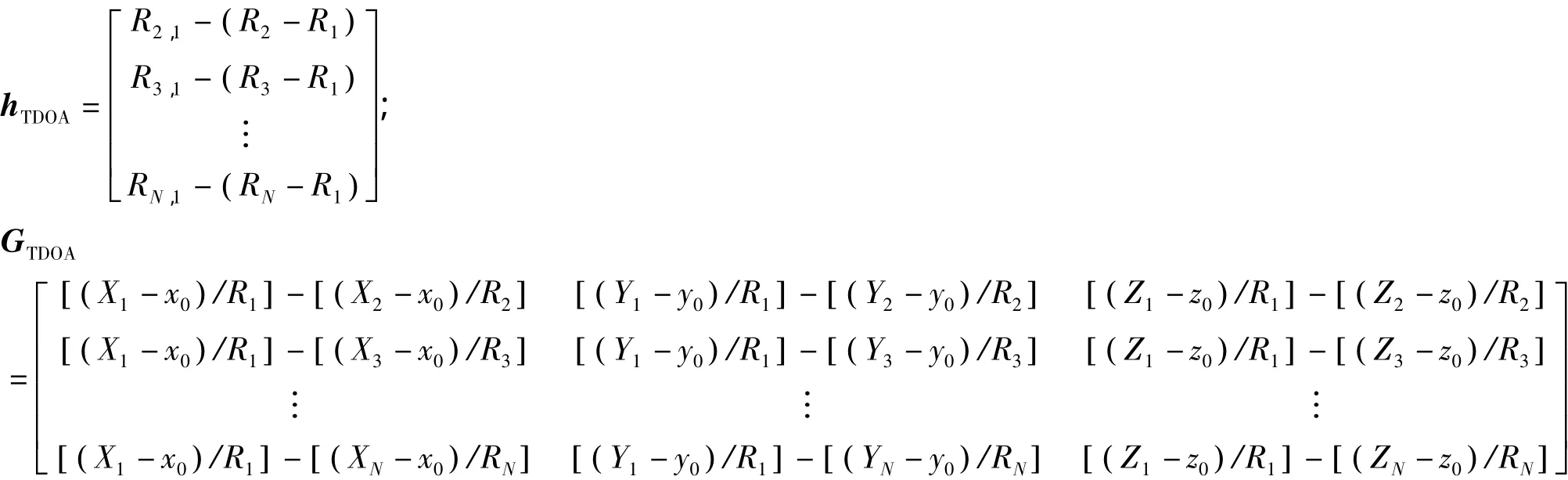
式中,Ri,1表示终端到基站i和基站1的距离差的观测值;(Xi,Yi,Zi)为第i个基站的三维位置坐标;(x,y,z)为移动终端的真实位置。在初始位置(x0,y0,z0)处做泰勒级数展开,略掉二阶以上分量,得线性方程组

式中,δ= [ ΔxΔyΔz]T;
AOA方位角、俯仰角联合伪线性方程组为
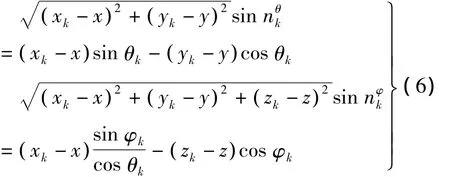
式中,θk、φk表示AOA观测量,即终端MS到基站k观测 值;(xk,yk,zk)为基站k的三维位置坐标;(x,y,z)为移动终端的真实位置。采取类似上面TDOA泰勒级数线性化的方法,得

式中


联合展开后获得的线性方程组式(5)和式(7),由加权最小二乘法得

为了算得未知的终端位置,观测方程至少应有3个以上。既有约束:N( )-1+M≥3。协方差矩阵QTDOA和QAOA可作为TDOA和AOA测量值的权值。当NLOS误差ni,1较大时,对角元素值较大,对计算结果的影响较小,在协方差估计困难时,取单位对角阵代入式(8),算得的δ加上初始值即得下次迭代的初始值,形成一块终端所在的目标区域。
3.逐次逼近定位算法
在获取定位信号参量总数n>4时,任意数学组合个参量信息,计算获得多个位置估计值Pv(xv,yv,zv)(v≥2)。由于目前位置服务中对高度信息的需求不是很高[10],本文以均值重构的方法求取平均值,得到一个高度信息参考值。此时,逐次逼近定位算法的核心问题就转化为求投影后二维平面内的最小包容圆C的圆心,该过程需要完成2个步骤的计算:
1) 立 体 几 何 变 换:以T= (a0,b0,c0)=(0 ,0,1)为法线,在zq处,求得Pv(v≥2)在平面π0:a0x+b0y+c0z+d=0 上的投影点P'v(x'v,y'v,z'v)(v≥2),其中z'v=zq。


定义微小移动步长ψ,将P0(x0,y0)沿I方向作尝试性移动,具体算式为

移动后得到的点记为P'0(x'0,y'0)。以δ'<δ为判断准则,如果δ'=max(P'0P″v)<δ成立,则本次移动成功,P'0取代P0,形成以P'0为圆心、δ'为半径的新外包圆;否则,步长ψ值减半,重复式(10)的计算。当ψ取值达到或小于计算精度的规定时,即可终止逐次逼近的计算过程。此时得到的圆即为所求的最小外包圆,符合“最小条件”意义的逼近条件,满足条件


最后,经空间坐标系反变换,就可得到终端MS的最终位置估计Pq(xq,yq,zq)。这里的逐次逼近定位法是对前节TDOA/AOA最小二乘混合定位算法的二次优化,从理论上分析,逐次逼近定位法能够获得更高的精度。
三、仿真验证
为了比较TDOA泰勒级数经典算法、TDOA/AOA最小二乘混合定位算法和逐次逼近定位算法的定位精度,本文以几何结构的单次反射圆盘模型(GBSB-DOSM)为例,对比NLOS条件下不同的定位基站数目、不同反射圆盘半径下的定位性能。假设参与定位的BS是7个小区组成的典型蜂窝结构,小区半径R=4 km,MS坐标在中央1/12小区内平均选,共选取100个点。然后对GBSB-DOS模型获得的TDOA和AOA测量值分别进行算法处理。
图2是不同BS数目下3种定位算法的定位性能与反射圆盘半径之间的关系,分别以均方根误差、平均误差和最大误差为精度指标,评价其定位性能。可得到的试验结果如下:
1)反射圆盘半径增大时,3种算法相应的定位误差均变大,即在恶劣网络环境下,定位结果会存在明显的系统误差,测量误差大,导致算法误差变大。
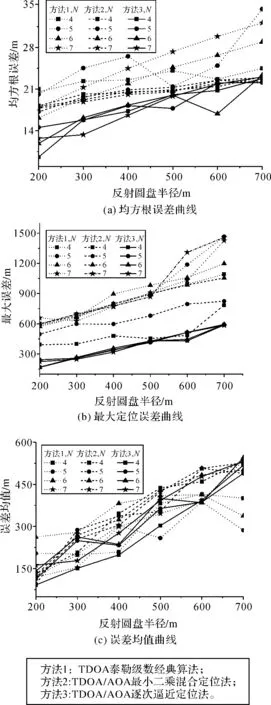
图2 不同基站数目条件下3种算法的定位性能比较
2)7 站定位比4站定位效果要好。由此可见,定位算法对基站数目的敏感性较强,获取准确定位参量越多,定位精度越准确。
3)与TDOA泰勒级数算法相比,TDOA/AOA最小二乘混合定位算法定位精度较高。可见混合定位在融合TDOA和AOA两种观测值后,所含定位信息量较大,会对NLOS产生明显抑制效果,有利于定位精度的提高。
4)在相同NLOS环境下,逐次逼近定位算法得到的曲线紧密,定位误差变化较小。这是因为逐次逼近定位算法是在一次定位的基础上,对目标区域内的终端求解最佳位置。经过多次定位估计和逼近,减小了移动终端与位置估计之间的距离,同时也屏蔽了多基站定位对时钟同步的要求,并且将多基站定位位置的计算放置在移动智能终端上,很好地消除了信号传输的时延。
四、结束语
时至今日,手机早已超出通话工具的范畴,PDA不再是孤独的终端,其无时无处不连接到Internet,使人们享受到以精确定位为基础的信息一体化服务。本文正是从这一点出发,提出了利用GIS判别选取后的蜂窝网络TDOA/AOA测量值,并进行了三维定位,突破了以往仅考虑二维信息的局限性,达到了准确立体定位的效果。仿真后的结果表明,在NLOS环境下,本文提出的算法定位精度高于其他两种算法,当基站数目较少时定位精度仍能保持稳定,且参加定位的基站数目越多,此优势越明显。在实际工程中,该算法中进行了两次位置计算,具有很好的灵活性,能较好地抑制NLOS误差,具有较强的应用性。
[1] 姜莉莉,巩振华.定位信息服务漫谈[J].测绘通报,2002(9):38-40,59.
[2] 刘林,范平志.多径环境下多终端协作高精度定位算法[J].西南交通大学学报,2011,46(4):676-680.
[3] 张国生,高博,姚慧敏.手机定位服务与电子地图[J].测绘科学技术学报,2007,24(3):675-682.
[4] 罗竣友,赵军辉,廖建雄.基于混沌优化的无线定位算法研究[J].电路与系统学报,2010(1):113-119.
[5] 郭丽梅,罗大庸.非视距环境中TOA/AOA混合定位方法[J].电路与系统学报,2010,15(5):26-30.
[6] 龚福祥,王庆,张小国.NLOS环境下无线通信网络中的TDOA/AOA混合定位算法[J].东南大学学报:自然科学版,2010,40(5):905-910.
[7] 张一衡,张昊,邹杰.下一代移动通信系统中的无线协同定位技术[J].北京邮电大学学报,2011,34(1):126-129.
[8] 范平志,邓平,刘林.蜂窝网无线定位[M].北京:电子工业出版社,2002:33-46.
[9] 富立,范耀祖.车辆定位导航系统[M].北京:中国铁道出版社,2004:146-152.
[10] 门朝光,徐振朋,李香.移动计算系统检查点迁移策略的性能评价[J].哈尔滨工业大学学报,2010(5):806-810.
猜你喜欢
空间科学学报(2020年3期)2020-07-24
成都信息工程大学学报(2019年4期)2019-11-04
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
电子制作(2017年8期)2017-06-05
雷达学报(2017年1期)2017-05-17
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24