
无源多传感器多目标融合的关联算法研究
2013-06-08 08:40郭高峰汪军华王郁鑫
雷达与对抗 2013年2期
郭高峰,臧 勤,汪军华,王郁鑫
(1.海军装备部装备采购中心,北京 100071;2.中国船舶重工集团公司第七二四研究所,南京210003;3.江苏科技大学,江苏 镇江 212003)
0 引言
在现代电子战中,为监视某一区域的空情,可按多站方案配置多部传感器。每部传感器独立测量与识别该空域中的所有目标信息。无源多传感器探测系统获得多个传感器探测到的辐射源信息,通过匹配、定位、点迹关联等手段将这些多站探测到的目标信息进行融合,能够对环境进行更加全面的描述;得出全局性的、更精确的航迹供指挥员用于作战决策,以减少雷达盲区,增加测量冗余度,提高处理质量。
1 无源多传感器多目标融合
多传感器无源探测系统的处理过程比单传感器无源探测系统更加复杂,其中多传感器目标的融合是整个处理过程中一个重要的组成部分。在实现过程中对每个传感器探测的目标数据进行匹配定位,然后再进行关联融合,如图1所示。

图1 多传感器无源探测系统融合过程
在融合中,包含了大量的不确定信息。首先,无论哪种传感器,其测量数据都会存在一定的误差。造成误差的原因可能是环境中的不确定性,如噪声;也可能是传感器本身存在的问题,如传感器故障或者模型偏差。因此,从这样的测量数据中提取的信息必然具有某种不确定性[1]。其次,在处理过程中,由于信息的损失也会产生新的不确定信息。
多传感器无源探测系统目标融合的研究对象就是这些不确定信息,通过融合处理可以降低信息的不确定性,提高对环境特征描述的准确性。
2 目标关联
多传感器无源探测系统多目标融合的一个关键问题是测量数据的关联问题,即找到各传感器对同一目标的观测数据,才能将这些数据进行融合,得到正确的目标位置信息[2]。目标关联是对当前测量时刻获得的多个观测站检测到的多个目标之间进行关联,判断出哪些目标为同一批目标在不同观测站检测到的,从而对目标航迹进行延续,哪些目标是新目标进行预处理,哪些目标是虚警。
目标关联主要是通过雷达测量数据中获得的多种目标特征信息作为目标关联的主要判断依据。在关联过程中需要对雷达测量信息互相验证,滤除虚假点迹和欺骗干扰,提取有用信息,提高输出目标关联的可信度。目标关联的一个重要问题是由于测量噪声和多种干扰的影响,测量值的不确定性容易造成关联错误,信息丢失。
无源辐射源信息关联过程如图2所示。多个无源探测平台截获的辐射源信息相互进行匹配定位获得点迹信息。
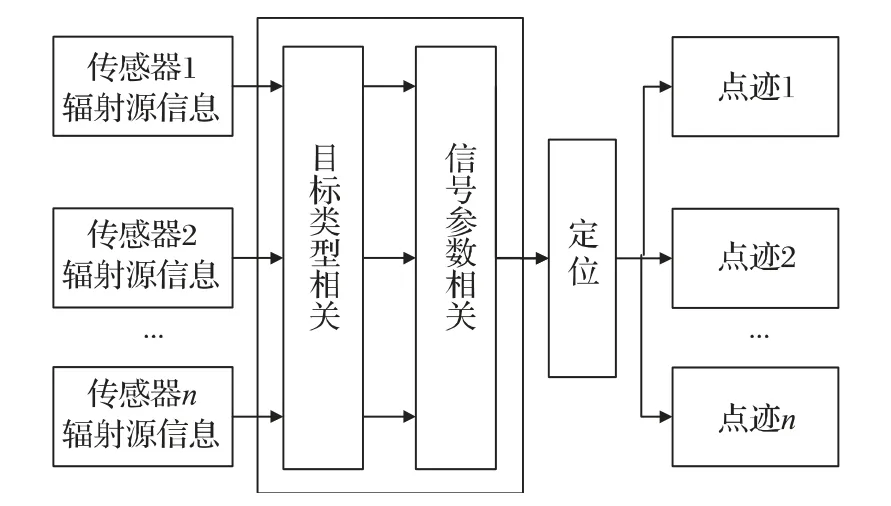
图2 多传感器目标关联定位流程图
已定位目标的目标关联过程如图3所示。对点迹的空间位置关系进行转换关联和解模糊进行融合。
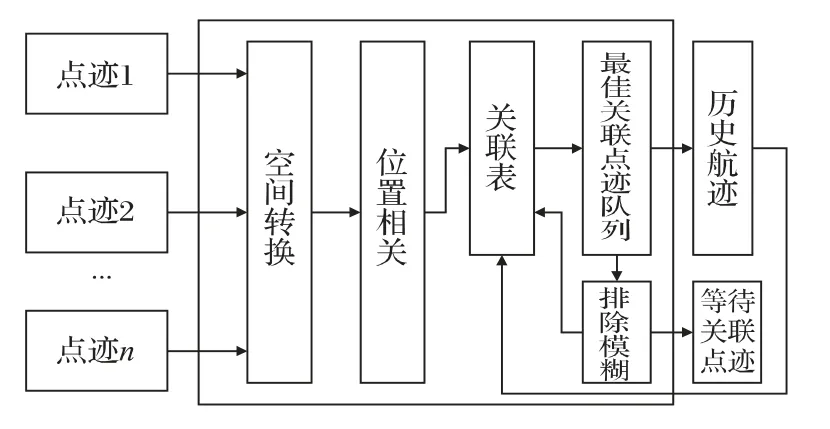
图3 多传感器定位目标关联流程图
2.1 目标属性数据关联
无源探测能够直接获取的目标运动状态信息仅包括角度信息。只有找到其他传感器对同一个目标的探测数据,才能够对目标进行交叉定位、时差定位,获得目标位置信息。在进行定位的过程中会产生很多虚假定位点,而无源探测在获取目标角度信息的同时还可获取目标的载频、重复周期、脉宽、到达时间、目标幅度、目标类型等特征信息。因此,在进行空间相关之前,可利用目标属性特征信息进行相关以减少虚假目标定位,同时也减少了后期的目标融合的工作量。
目标属性特征包括已识别辐射源的目标类型和目标辐射源的信号参数(包括载频、重复周期、脉宽、信号幅度、到达时间等)。如果属性特征关联后得不到唯一关联结果,要再进行空间关联。
理论上,源自同一目标的属性特征是相同的。但在实际应用中,由于测量误差,同一辐射源的属性特征会有变化。同时,由于战场环境的复杂性,不同的辐射源也有可能存在相似特性。
属性相关包括两种:一种是同一周期辐射源信息的属性相关,一种是当前周期辐射源信息与历史周期中已获得航迹或点迹的目标特征值属性相关。
2.1.1 目标类型关联
无源探测传感器对辐射源信息分别进行识别,对已识别的辐射源信息可以采用目标类型关联,主要包括3个层次,如图4所示。
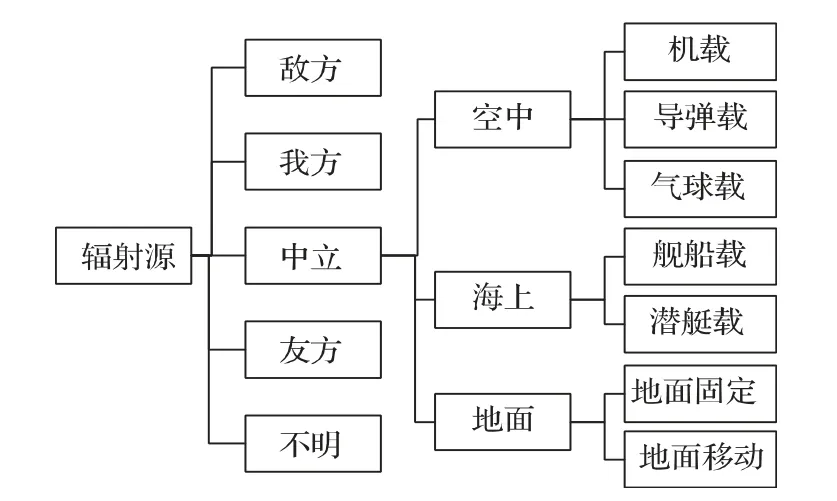
图4 辐射源识别类型关联
在关联过程中,首先依据目标性质(敌方、我方、中立、友方、不明)的不同进行关联,再按照目标类别(空中、海上、地面)关联,最后按目标类型(舰船载、潜艇载)进行关联。
如果某个目标属性空缺,则自动进入下一个阶段的关联过程,进而把关联范围逐步缩小[3]。
在目标识别过程中,由于识别也存在误判,为了防止误判带来的关联错误,只能依次进行打分,在后期通过多个关联属性的分值进行比较,得到最佳关联。这部分内容在最后一节会具体描述。
2.1.2 信号属性特征关联
信号属性特征关联包括载频特征关联、脉宽特征关联、重复周期特征关联。在应用过程中,计算当前周期检测到的每个辐射源Pi的某个特征值信息Ki与其他辐射源Pj特征值信息Ki的绝对偏差Dk,通过比较各个测量值的绝对偏差进行排序。根据顺序对每两个辐射源特征参数关联性进行记分,偏差越小分数越高。依次对所有特征信息进行记分,存入参数关联矩阵,见表1。
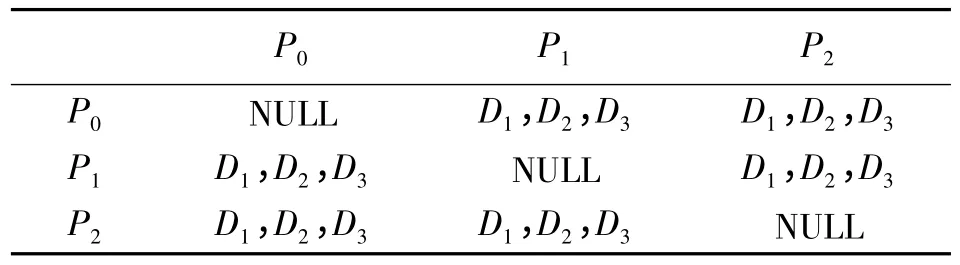
表1 信号属性特征关联矩阵
2.2 数据配准
对于由多个不同探测平台辐射源信息定位获取的点迹信息,由于各平台采用的采样周期和坐标系可能是不同的,所以在进行目标数据融合之前,需要将各个平台转换到同一标准上。
2.2.1 空间转换
空间转换主要采用基于ECEF(大地坐标系)的误差校准技术。ECEF 对于远距离误差校准比球(极)投影的误差校准技术较准确。
在前期无源定位过程中,为了便于后期处理的统一性,探测目标都以经纬度进行记录。假设探测目标的地理坐标为(lon,lat,hig),其中lon 表示经度,lat 表示维度,hig 表示海拔高度。ECEF 笛卡儿坐标为(xt,yt,zt)。则

C定义为

2.2.2 位置相关
位置相关是衡量点迹与航迹预测点之间、点迹与点迹之间空间亲近程度的运算。以一个参考点为中心,以某种形状的波门为界限,计算测量点与参考点间空间距离是否小于或等于波门长度。落入波门内的测量点称为参考点的相关点,否则称为不相关点。
参考点可以是一条航迹的预测点,或是上一周期记录的点迹。而测量点指当前周期录取到的点迹。波门可以根据不同的坐标系选取不同的表达式或形状,如矩形、扇形、圆形。
以参考点为中心,以最小波门、最大波门构成双重界限。当测量点落入两波门间时,认为两点迹相关。假设为直角坐标系,波门形状为矩形[4]:
式中,△Xmax、△Xmin分别为以最大、最小运动速度计算出的一个搜索周期的距离,即最大、最小波门,其中最大最小运动速度与目标类型有关。x为测量点,x0为参考点。Y 轴含义与X 轴相同。当测量点符合不等式,则认为相关,否则为干扰点。
若存在一个参考点对应多个相关测量点或多个参考点对应一个测量点时,则根据系统经验分配相关程度权值,通过综合考虑多个相关权值选择最佳相关点。
2.3 排除模糊
在无源定位的情况下,由于空间信息较少,仅根据目标属性匹配,很可能发生匹配错误的情况,从而造成多个错误点迹。在无源定位初期很难判断出点迹的真实性,也不能任意舍弃其他可能点迹。因此,在实现过程中把所有可能的点迹都保存下来,并进行点迹关联,建立关联表,根据关联表寻找最佳关联点迹。再根据目标运动特性排除错误的关联点迹,同时修改关联表,寻找其他关联可能性。
2.3.1 关联表
首先建立参数关联表,在关联前期记录每个关联可能性的权值。在后期进行最佳相关的选择时,通过权值加权来获取综合相关最接近的相关目标。在此,可以采用关联矩阵[5]的方法,如表2所示。
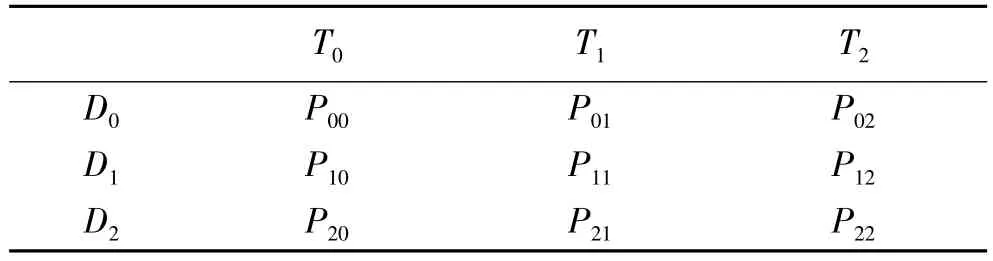
表2 关联矩阵
在矩阵中,T为航迹点或上一周期点迹;D为点迹;pij为Di与Tj之间的综合相关接近程度,为之前所有参数关联分值的加权和:

其中,X1、X2为前面计算的相关接近程度,θ1、θ2为每个相关参数的权重,可以根据系统经验赋值。关联准则如下:点迹与点迹具有多种关联可能,而其中最多只有一种关联可能是成立的。
在无源定位的情况下,干扰的虚假目标比较多,真实目标比较少,可以采用以下配对流程:
首先,把历史航迹按照航迹质量进行排序,先给航迹质量高的目标Ti进行配对,根据关联矩阵找到权值p 最高的点迹Dk,配给该航迹;同时把该点迹Dk剔除出关联矩阵,即该点迹不能再配给其他低质量的航迹;
然后,按照航迹质量顺序依次遍历,找到对应的最佳关联点迹。当一条航迹没有相关点时,录取预测点为该轨迹的新点迹,调整轨迹质量,完成下一周期内的运动预测[4]。
2.3.2 虚假点迹排除
首先根据关联表寻找本点迹是否存在航迹进行关联,若是不存在就放入等待队列,当本点迹截获时间超过本周期老化时间时直接删除;若是存在则可以通过目标运动特性对其进行筛选。图5为模糊排除流程图。
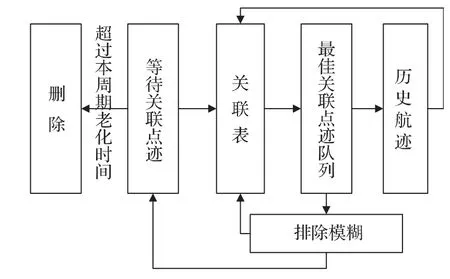
图5 模糊排除流程图
通过对关联历史点迹的距离差和时间差计算目标运动速度和加速度。当运动速度或加速度超过正常目标运动范围时(如超过光速)则判定该点迹关联错误。根据关联表寻找是否还存在其他关联情况,若是不存在则放入等待队列,当点迹的截取时间已经超过本周期老化时间,则认为该点迹为虚假点迹,进行删除。
3 结束语
多传感器无源探测多目标跟踪的一个关键问题是测量数据的关联问题,只有找到各传感器对同一目标的观测数据,才能正确得进行融合。数据关联的关键是要找到系统探测的规律,并将目标的运动模型和系统的量测模型统一起来。本文从实际的工程应用入手,探寻多传感器无源探测系统目标相关的算法。通过对辐射源目标特性进行分析,得出基于目标属性参数、位置的相关算法,并将其应用到目标融合中去。
[1]王军,苏剑波,席裕庚.多传感器融合综述[J].数据采集与处理,2004,19(1).
[2]何友,修建娟,张晶炜,关欣,等.雷达数据处理及应用[M].2 版.北京:电子工业出版社,2009.
[3]朱靖,孟晓风.多传感器目标跟踪航迹关联技术及应用[J].电子测量与仪器学报,2003,17(2).
[4]陈北辰.多目标轨迹处理方法简介[J].无线电工程,1989(5).
[5]马敏,张承志,薛萍冰.一种无源雷达的数据关联技术[J].雷达科学与技术,2010(1).
猜你喜欢
北京航空航天大学学报(2020年10期)2020-11-14
空间科学学报(2020年3期)2020-07-24
青年歌声(2019年12期)2019-12-17
电子制作(2019年12期)2019-07-16
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年6期)2017-11-23
雷达学报(2017年1期)2017-05-17
北京航空航天大学学报(2016年6期)2016-11-16
