基于遗传神经网络的高速公路纵坡运行速度预测方法研究
2013-08-07 05:45靳灿章候志峰徐桂兴杨朝辉
城市道桥与防洪 2013年1期
靳灿章,候志峰,徐桂兴,杨朝辉
(天津市市政工程设计研究院,天津市 300051)
0 前言
目前,公路线形设计的基本依据是设计速度,它决定了公路几何线形的各项要素。设计速度是一固定值,其作为基础参数,规定了某一路段的最低设计标准,设计中只要一条公路所采用的最低指标大于其设计速度对应的最低指标,就认为该设计符合要求。经过多年的设计实践,发现这种设计速度的方法存在诸多不足之处,主要表现在:(1)线形设计要素与实际行车速度不相容;(2)线形设计要素之间不相容;(3)线形的行车速度标准不一致。为此,《公路路线设计规范》(JTG D20-2006)对线形设计引入了运行速度检验的概念,运行速度考虑了绝大多数驾驶员的交通心理需求,是车辆的实际运行速度,以其作为线形设计参数,可以消除现行设计方法的不足,有效地保证了线形相关指标与速度的相容性,可以获得连续一致的均衡设计。
不同车辆的运行速度各不相同,但运行速度值一般呈正态分布,通常以小客车在车速分布累计曲线上第85位百分点的速度来表示运行速度,即V85。
运行速度是车辆实际行驶的速度,在公路建成之前无法实测获得。因此,应用运行速度作为设计参数进行线形设计或设计成果检验的关键就是运行速度的预测。而运行速度又受人、车、路及周围环境等多种因素的影响。本文通过对高速公路不同纵坡路段运行速度的调查,研究在自由流运行条件下,公路纵断面线形指标(主要指坡度i与坡长S)与高速公路运行速度的相关关系,运用遗传神经网络的方法来预测高速公路纵坡运行速度的方法。
1 算法介绍
BP(back-propagation)算法作为一种神经网络训练方法,由于其理论依据扎实,推导严谨,物理概念清晰,目前仍是应用最为广泛的神经网络模型之一。但是,该算法学习收敛速度慢,得到的网络性能较差。
遗传算法通过模拟自然界的进化过程来迭代产生适于解决问题的优化解,其搜索机制中的隐含并行性使得搜索过程能不断向全局最优解逼近。遗传算法具有:自组织、自适应和自学习性(智能性),并且在本质上具有并行性;遗传算法不需要求导,只需要影响搜索方向的目标函数和相应的适应度函数。
将BP神经网络与遗传算法结合起来,取长补短,能有效解决很多一般数学方法难以解决的问题。遗传神经网络模型的总体结构如图1所示。
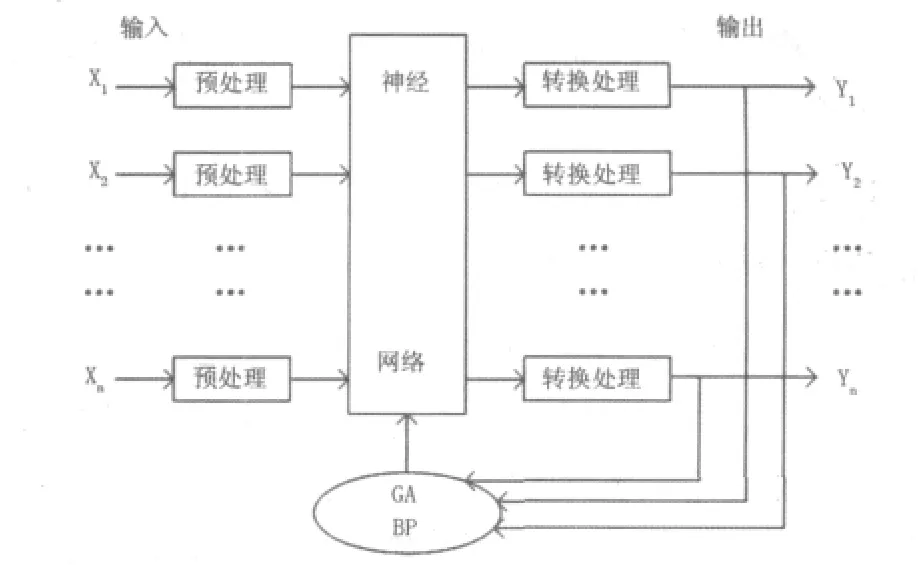
图1 遗传神经网络预测模型功能框图
1.1 遗传算法优化神经网络的结构
(1)个体编码。采用二进制编码形式,确定隐含层神经元个数的空间大小,对遗传染色体进行编码操作,每一条染色体个体对应着隐含层神经元个数的一种取值。
(2)初始化。随机产生一定数目的个体组成初始种群。
(3)计算适应度。设网络输入N次信号,输出n次正确解,则适应度函数为:f=n/N。适应度函数f在[0,1]区间内,其中f值越接近1的个体,其输出信号的正确率就越高。
(4)遗传操作的确定。首先将当代种群的个体按适应度由大到小排序,然后选择一定的下位个体将其淘汰,淘汰率一般为30%;在上位个体中实行均匀交叉,生成的子个体填补到种群中,以保持种群的规模不变。最后实行变异操作,生成子代种群。
1.2 遗传算法优化神经网络的权值
(1)个体编码。将神经网络各层之间可能存在的连接权值编码成实数码串或者二进制码串,每条码串中包含着网络中的所有权值,其排列顺序可以自定,组成一个染色体。
(2)初始化。随机产生一定数目的码串个体组成初始种群。
(3)计算适应度。设网络共有M个训练样本,让所有的训练样本依次通过解码后生成的神经网络,计算所有训练样本一次通过的平均总误差作为每条染色体的适应度,如公式:
式中:Ti——实测值(即纵坡实测运行速度值);
Oi——网络的输出值。
(4)遗传操作的确定。将选出的染色体进行单点交叉,然后随机产生一小的概率对随机选中的一部分染色体个体码串进行变异操作。为了克服遗传算法的“早熟”现象,可以在算法进行初期采用较小的变异概率,在算法运行一段时间后,采用较大的概率,加快染色体的变化程度,保持种群个体的多样性。
2 运行速度与高速公路纵坡线形指标遗传神经网络模型的建立
影响纵坡运行速度值的线形指标主要是坡度i与坡长S,本文选择坡度i、坡长S、纵坡初速度Vin三个参数为输入参数,实测纵坡出口速度Vout为输出参数。采用遗传神经网络的原理,以大量实测小客车高速公路纵坡运行速度值(V85)建立上、下坡学习样本。上坡与下坡学习样本、实测值、网络输出值分别如表1、表2所示。
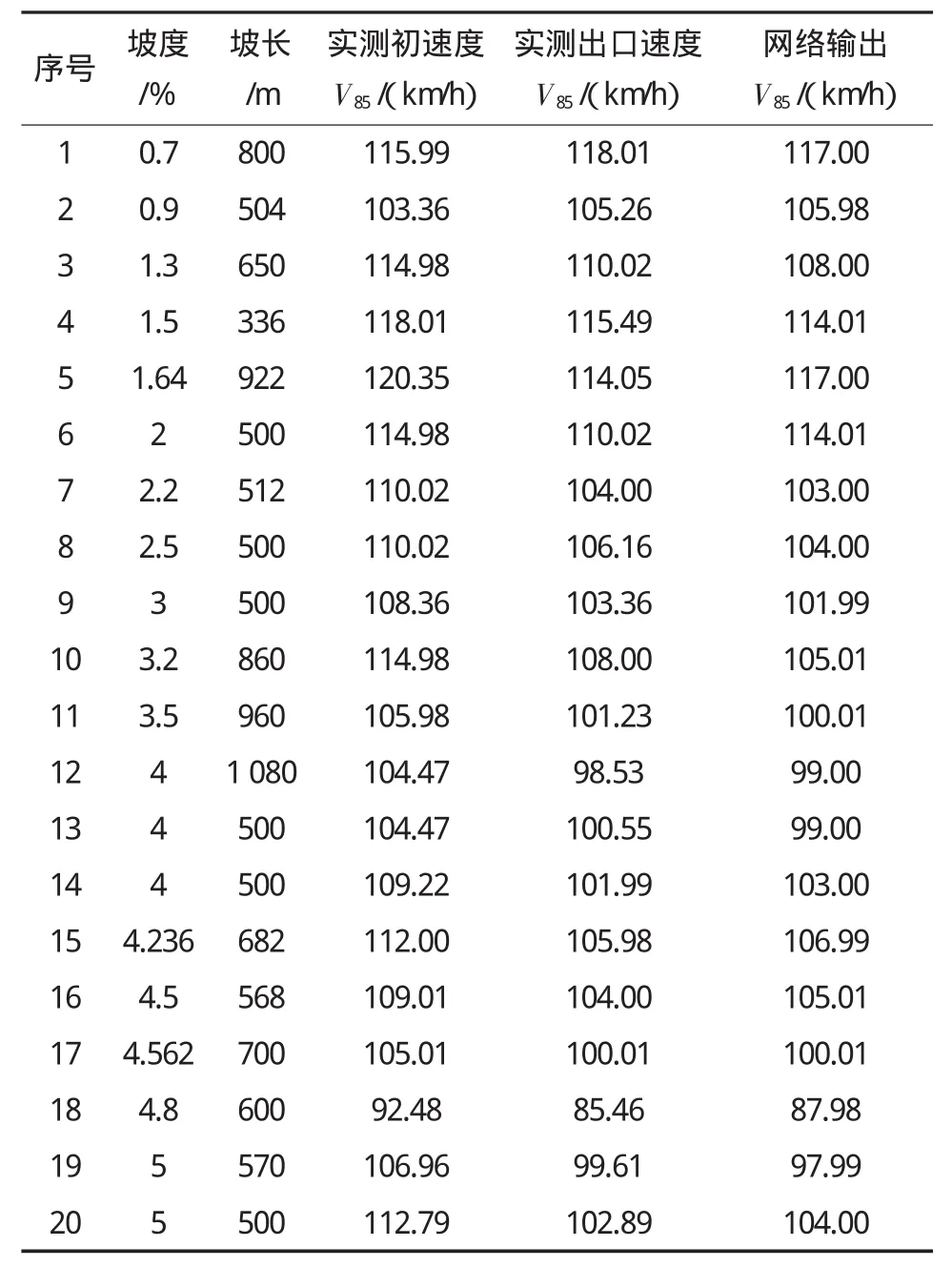
表1 上坡网络学习样本及预测值

表2 下坡网络学习样本及预测值
利用Matlab神经网络工具箱函数,先将输入数据利用premnmx函数进行归一化处理,并用很小的随机数对每一层的权值初始化,以保证网络不被大的加权输入饱和。网络期望误差最小值为0.002,最大训练次数为8 000,利用遗传算法对神经网络进行优化,本文略去了网络的具体实现过程,只给出了结果如图2、图3所示。网络训练结束后,对网络的输出(归一后的预测值)进行恢复,得到了网络的实际输出,见表1、表2。可以看出,最大误差为3.83%,网络的训练精度非常高。
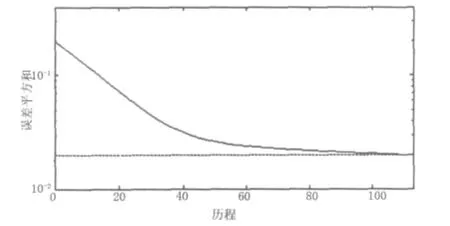
图2 网络训练误差变化曲线
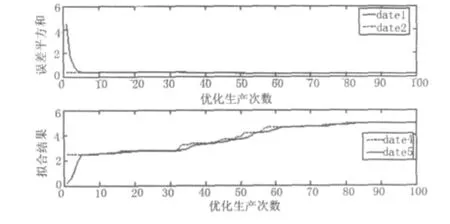
图3 遗传算法优化神经网络
3 高速公路纵坡运行速度的预测
在表1、表2中分别用其中4个样本为检测样本,其余作为训练(学习)样本,网络模型、参数均不变,可预测不同坡度和坡长下的运行速度值,预测结果详见表3。由表3中的数据可以看出,预测最大误差在7%左右,证明遗传神经网络模型的预测精度较高,可用此模型预测不同纵断面线形指标的运行速度,从而指导线形的评价、修改。
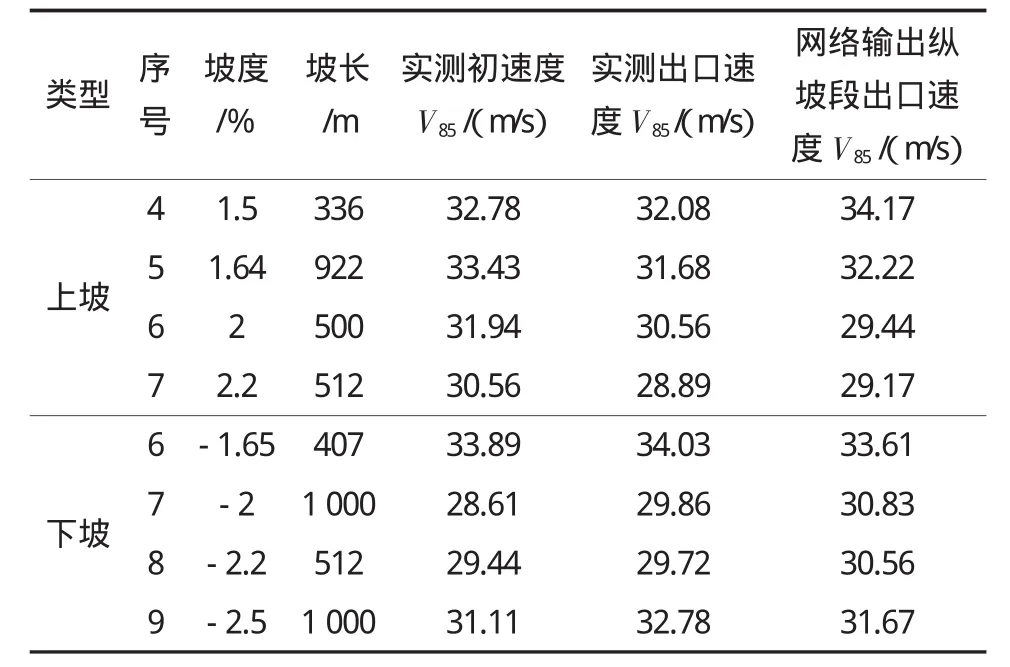
表3 运行速度预测结果对比表
4 结论
遗传神经网络具有很高的非线性处理能力,借助MATLAB的工具箱较易实现程序的编写。通过遗传神经网络可以建立运行速度与高速公路纵断线形指标之间的关系模型,用此模型可以估算新建或已建高速的纵坡车速,其结果较为可靠。这将对推广采用运行速度的设计方法有一定的参考价值。
[1]JTG D20-2006,公路路线设计规范[S].
[2]周荣贵.公路纵坡坡度与坡长限制的研究[D].北京:北京工业大学,2004.
[3]VELASCO JR,MAGDALENA L.Genetic algorithms in fuzzy control systems[A].WINTER G W.Genetic algorithms in Engineering and Computer Science[C].Great Britain:Academic Press,1995.141-165.
[4]GRUAU F.Genetic microprogramming of neural networks[A].KOZA J T.Genetic programming[C].New York:Oxford University Press,1994.495-517.
猜你喜欢
国防交通工程与技术(2022年6期)2022-11-18
计算机仿真(2022年8期)2022-09-28
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
石油沥青(2020年1期)2020-05-25
工程与建设(2019年3期)2019-10-10
郑州大学学报(工学版)(2018年2期)2018-04-13
中国公路(2017年11期)2017-07-31
中国塑料(2016年11期)2016-04-16
中国塑料(2015年1期)2015-10-14