
环形激光器用于角速度测量的实验
2013-12-01 01:54汪之国施建华谭中奇
物理实验 2013年2期
汪之国,施建华,张 斌,谭中奇
(国防科技大学 光电科学与工程学院,湖南 长沙410073)
1 引 言
激光在测量领域具有重要的应用[1-2],常见的激光器如直腔或折叠腔属于驻波激光器,其谐振腔中的光波沿光轴正向和反向各运行1次才能回到出发点,因此二者振荡频率相同,在腔内形成驻波[3].在环形激光器中,光波沿同一方向运行1周即可回到出发点,因此顺时针光波和逆时针光波能够以不同的频率独立振荡,它们的频差对各种非互易效应非常敏感[4].环形激光器相对惯性空间的转动会导致顺和逆时针光波产生可观的频差,因此可用作角速度传感器.由于其功能和传统的转子陀螺相同,又被称为激光陀螺[5].与机械转子陀螺相比,激光陀螺有很多优点,如动态范围大、比例因子精确、对加速度不敏感等,使它特别适合制成捷联惯性导航系统,在惯性导航系统从平台式到捷联式的发展中起到了革命性的作用[6].反射镜的散射使顺、逆时针光波产生一定的耦合,导致激光陀螺存在闭锁效应,因此工程应用的激光陀螺都要采取偏频技术[7].激光陀螺主要按偏频方案来进行分类:机械抖动激光陀螺采用机械抖动装置,使激光陀螺腔体以高频率和小幅度角向振动,从而大大减少它在锁区的时间;四频差动激光陀螺通过在1个腔体内建立2个陀螺,每个陀螺都进行恒定偏频来避开锁区,然后将2个陀螺的拍频相减即可将偏频扣除;塞曼偏频激光陀螺是利用增益介质的塞曼效应,通过在增益区上施加纵向磁场来产生偏频;速率偏频采用机械转台,使激光陀螺腔体以低频率大幅度角向反复转动,以减小它处于锁区的时间;磁镜偏频激光陀螺是将一面反射镜做成磁镜,利用磁光克尔效应产生偏频.近10年来,国内激光陀螺技术发展迅速,应用领域不断拓展.2000年前后机械抖动激光陀螺的几个关键问题得到了解决[8-9].到2005年,激光陀螺捷联惯导已达到优于1nmile/h的精度[10],能够满足绝大部分航空、航天上的应用要求.到2008年,采用旋转调制技术的激光陀螺惯导已达到优于3天1nmile的精度[11-12],满足长时间导航要求.为了使学生了解并掌握激光陀螺这种先进测量仪表的工作原理,国防科技大学开设了激光陀螺实验课程.本文介绍了环形激光器测量角速度的原理,搭建了环形激光器系统,并证明它可用来测量角速度.
2 实验原理
在图1所示的环形干涉仪中,光波沿圆环传播.在t=0时刻,光波从A点进入干涉仪,然后被分束器分成沿顺时针和逆时针运行的2束光波,这1对行波不妨称为反向行波.
当干涉仪静止时,顺时针和逆时针光波沿环路运行1周的时间相同,为

式中,R为干涉仪半径,c为光速.

图1 环形干涉仪
当干涉仪绕过圆环中心且垂直于干涉仪平面的轴以恒定角速度Ω旋转(定义顺时针方向为正),2束光波运行1周的时间将会产生差别,这是因为在光波运行过程中A点的位置发生了变化.顺时针光波要多走一段距离才能回到A点,逆时针光波少走一段就能回到A点,二者再次到达A点的时间t±分别满足

式中下标“-”和“+”分别对应逆时针和顺时针.进一步化简得
由于现实中干涉仪的线速度远小于光速,这时可近似得到

反向行波由于运行时间不同而产生的光程差为

式中A=πR2表示环形干涉仪的面积.(5)式表明,在环形干涉仪中反向行波运行1周的光程差与光路围成的面积和转速成正比,该现象称为Sagnac效应.
使用环形干涉仪作为实用器件的困难来自于灵敏度不够,例如1925年盖尔等人采用610m×335m的矩形环路来测量地球的自转角速度却只产生了0.13μm的光程差,约相当于1/4个干涉条纹[13].直到激光出现以后,利用环形激光器将反向行波运行1周的光程差转换为谐振频率差才使Sagnac效应获得了实用价值.
环形激光器的谐振腔通常由不少于三面的高反射率反射镜构成,反射镜的几何位置保证行波模式在谐振腔中自再现,一种典型配置如图2所示.根据激光自再现条件,环形谐振腔内光波的谐振频率必须满足:

图2 环形激光器

式中,q为纵模阶数,〈L〉=nL为光波运行1周的光程.〈L〉的微小变化会导致谐振频率发生微小变化:

将(5)式代入(7)式得Sagnac效应引入的频差为

由于光频非常高(1014Hz量级),光程的微小变化即可引起显著的拍频.将(8)式对时间求积分,可得时间t内拍频振荡周期数N 与环路转过的角度θ之间的关系:

为了测量环形激光器中反向行波的频差,采用图3所示的棱镜将顺时针和逆时针光波以很小的夹角γ合并在一起,垂直光波的平面上的干涉场为

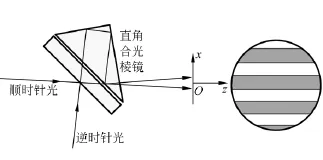
图3 合光
与普通的双光束干涉稍有不同,(10)式所表示的光场随时间以频率Δν余弦振荡.将2个探测器A和B以一定间隔放在干涉场中,它们输出的交流信号为

通过比较IA和IB的相位关系即可判断环形激光器的转动方向.
3 实验装置及结果
实验装置采用分立式环形激光器,包括He-Ne增益管、放置在2维调整架上的反射镜、光电探测器以及步进电机转台和控制器等,如图4所示,其中M1~M3为反射镜;BS为分束器;BM为反射镜.

图4 实验装置
调整反射镜和放电管,将环形激光器调整出光,合光并用光电探测器将光拍信号转换为电信号.利用频率计测量顺时针和逆时针光波的频差,采用1s的测量间隔.设定转台的角速度,从5°/s开始,步长为5°/s,直到30°/s,每次转动范围为30°,测出频差随角速度的变化曲线,如图5所示.线性拟合得到比例因子为6 634.3Hz/[(°)·s-1],与理论值非常接近.
角速度从1°/s开始,以步长0.1°/s降低,转动范围为10°,测出频差随角速度的变化曲线,结果见图6.线性拟合出比例因子为5 931.7Hz/[(°)·s-1],已经偏离理论值较多,这是由于闭锁效应,角速度较小时将会偏离实际值.

图5 频差随角速度变化曲线

图6 接近闭锁时频差随角速度变化曲线
4 结束语
搭建了环形激光器,测量了频差随角速度的变化关系,表明它可以用于角速度的测量,但在角速度较小时要注意闭锁效应的影响.该实验能够提高学员的操作能力,了解并掌握激光陀螺的工作原理.
[1]闫玺,张景超,李贺,等.基于激光透射法测量平板玻璃的厚度[J].物理实验,2012,32(5):1-5.
[2]从守民,路洪艳,刘保通.自组建激光干涉仪测量平行板楔角[J].物理实验,2011,31(9):29-33.
[3]周炳琨,高以智,陈倜嵘,等.激光原理[M].4版.北京:国防工业出版社,2000:183-184.
[4]Kravtsov N V,Kravtsov N N.Nonreciprocal effects in ring lasers [J].Quantum Electronics,1999,29(5):378-399.
[5]Chow W W,Banacloche J G,Pedrotti L M,et al.The ring laser gyro[J].Reviews of Modern Physics,1985,57(1):61-104.
[6]King A D.Inertial navigation-forty years of evolution[J].GEC Review,1998,13(3):140-149.
[7]汪之国.异面腔四频差动激光陀螺的零偏特性与电子系统设计[D].长沙:国防科技大学,2010.
[8]谢元平.机械抖动激光陀螺鉴相解调与稳频技术的研究[D].长沙:国防科技大学,2000.
[9]汤建勋.机械抖动激光陀螺抖动偏频系统的研究与设计[D].长沙:国防科技大学,2000.
[10]王宇.机抖激光陀螺捷联惯导系统的初步探索[D].长沙:国防科技大学,2005.
[11]龙兴武,汤建勋,王宇,等.船用激光陀螺惯导系统的研制[A].中国惯性技术学会第六届学术年会论文集[C].2008:15-23.
[12]龙兴武,于旭东,张鹏飞,等.激光陀螺单轴旋转惯性导航系统[J].中国惯性技术学报,2010,18(2):149-153.
[13]Heer C V.History of the laser gyro[C].SPIE,1984,487:2-12.
猜你喜欢
中国电气工程学报(2020年15期)2020-11-16
阅读(科学探秘)(2020年8期)2020-11-06
宇航学报(2018年11期)2018-12-06
科教导刊·电子版(2017年35期)2018-01-27
民间故事选刊·上(2017年5期)2017-05-17
中外文摘(2015年6期)2015-11-22
知识窗(2015年1期)2015-05-14
科技与创新(2014年13期)2014-09-02
新媒体研究(2009年2期)2009-03-02
