一类转子-轴承-密封系统在静态偏置下的动力学方程建模和仿真
2014-03-27 02:02李晓蕾史建文
云南民族大学学报(自然科学版) 2014年3期
王 楠,李晓蕾,史建文
(兰州交通大学 数理学院,甘肃 兰州 730070)
关于转子-轴承-密封系统模型的研究已有大量的成果[1-3].由于现代旋转机械的转速和压力不断地增高,密封间隙流体激振问题越来越突出,控制密封间隙的流体激振成为现代机械发展的关键技术之一.在对单一的油膜力系统和密封系统研究的已经比较多,目前对于密封系统的理论研究都是大多没有考虑静态偏置条件下完成的,因此本文在密封流体激振模型中考虑了油膜力和密封力的耦合,并且在轴颈在密封腔中考虑静态偏置条件下进行的动力学分析研究,为旋转机械的安装误差和标高设计提供理论上的依据[4].
1 转子-轴承-密封系统的动力学模型
转子-轴承模型可以简化为刚性支承的Jeffcott转子-轴承系统,两端采用滑动轴承,轮盘处考虑密封作用(如图1) ,考虑静态偏置.
在图1中O1为轴颈的几何中心;O2为圆盘的几何中心;Om为圆盘的质心.密封力Fx,Fy等效作用在圆盘上,油膜力fx,fy作用在轴颈上.
设X1,Y1为轴颈几何中心位移,X2,Y2为转子密封处圆盘中心位移,m1为轴颈处的集中质量,m2为转子密封处圆盘质量,r1为轴颈处质量偏心距,r2为转子密封处圆盘质量偏心距,c1为转子在轴承处的结构阻尼,c2为转子圆盘阻尼,Ke为转轴刚度,ω为转子角速度.考虑转子偏心和轴承偏心量,系统的运动微分方程表达如下:


油膜力非线性模型表达式:

式中:fx,fy为油膜力(量纲是1);δ为Sommerfeld修正数;μ为润滑油粘度;cz为轴承半径间隙;L为轴承长度;R为轴承半径.
与上式中有关的表达式如下:
非线性密封力的表达式:
式中:K,D和mf分别为密封力的当量刚度、阻尼和质量;τ,ω,D是密封力的交叉刚度项;K,D,τf均为扰动位移x,y的非线性函数, 可表达为:
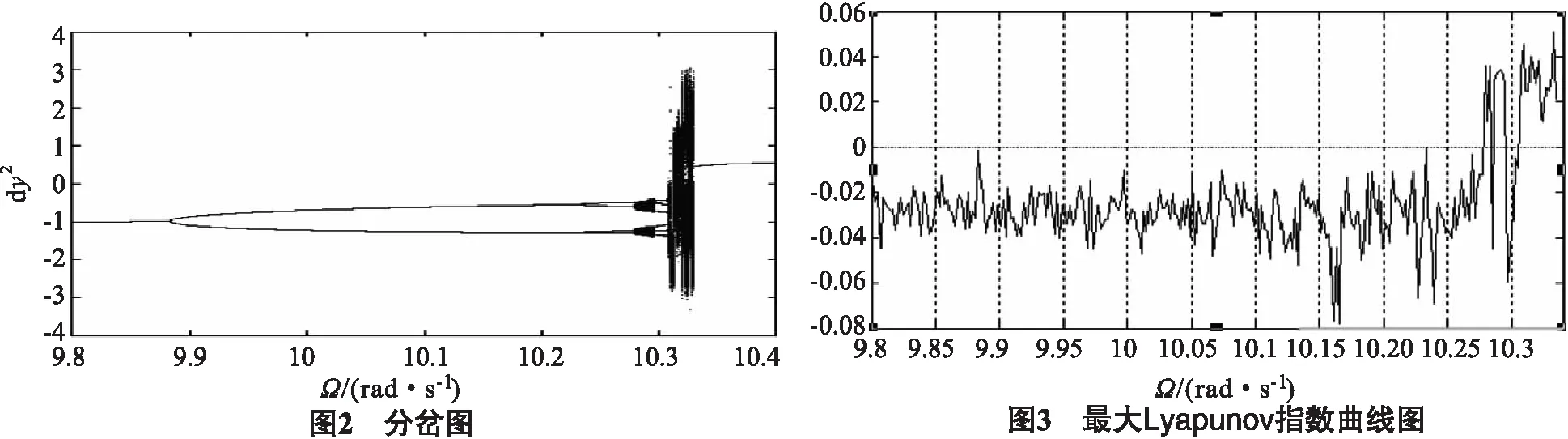
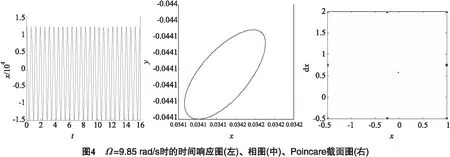
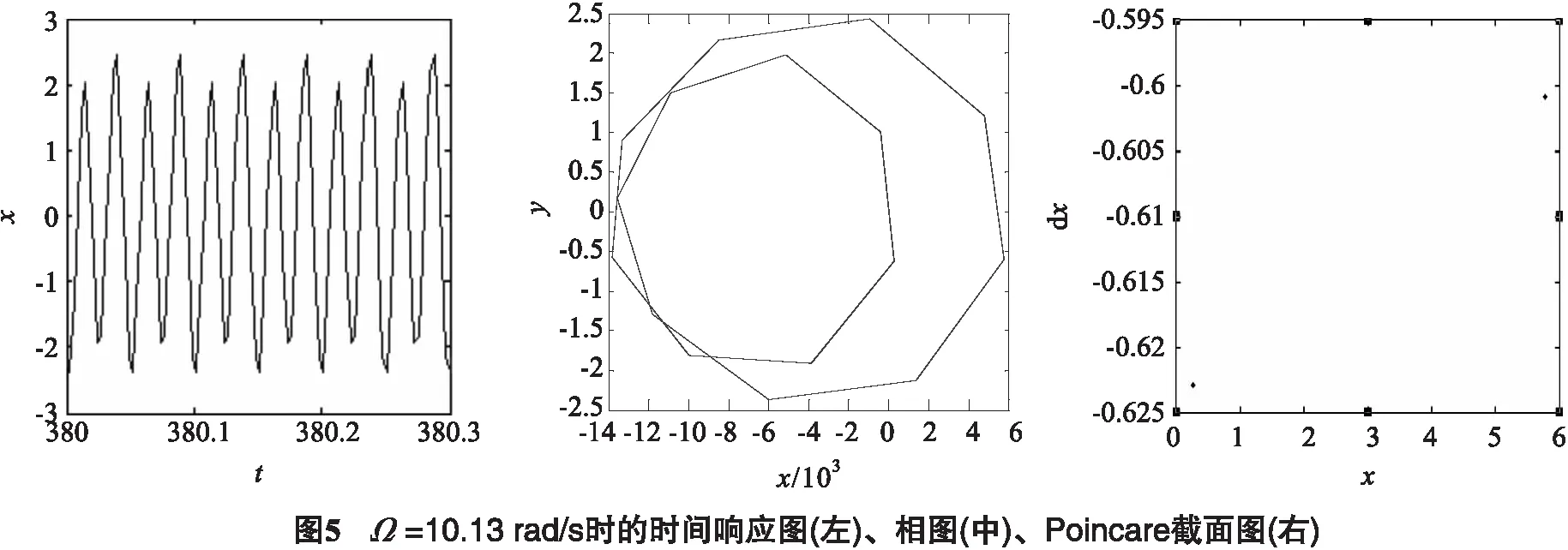
K=K0(1-e2)-n,D=D0(1-e2)-n; 其中 转子-轴承-密封系统的量纲为1的运动方程如下: 其中 仿真中用到的主要参数:m1=420 kg,m2=110 kg,k1=105.2 MN·m-1,c1=5 000 N·s·m-1,c2=9 300 N·s·m-1,cz=0.2 mm,cm=1 mm,r=0.03 mm. 从图2可以看出Ω=9.88 rad/s时出现了分岔,形成了2周期运动(如图4);在Ω=10.232 rad/s时,有2周期运动形成了4周期运动(如图5);在Ω=10.279 rad/s时,出现了失稳现象;转子失稳后,出现了复杂的演化过程,随着Ω的增大,概周期与倍周期交替出现,在某些狭窄的区域内还出现了8周期等运动. 最大Lyapunov指数图(见图3)与转子分叉图(见图2),在周期运动、拟周期运动、混沌运动的描述一一对应.但最大Lyapunov指数图只能判定系统是否进行周期运动,而不能区分周期k运动,图4~7分别描述的是周期1、周期2、周期4和混沌运动的时间响应图、相图与Poincare截面图.当Ω<9.88 rad/s时,Lyapunov指数小于0,可以看出系统进行周期运动,当Ω<10.279 rad/s时,Lyapunov指数小于0,系统依然进行周期运动,当10.279<Ω<10.281时,Lyapunov指数大于0,说明系统进行混沌运动,10.281<Ω<10.283时,Lyapunov指数小于0,系统再次进行周期运动,10.283<Ω<10.291时,Lyapunov指数大于0,系统又一次进入混沌运动,10.291<Ω<10.322,Lyapunov指数小于0,表明系统进行周期运动,10.322<Ω<10.335,Lyapunov指数大于0,说明系统进入了混沌运动. 当Ω=9.85 rad/s时(见图4),时间响应图中的波峰是等高的,因此,进行的是1周期运动;所对应的相图中,是一条封闭的曲线,确定为1周期;庞加莱截面图中,为一个孤立的点,所以符合1周期运动. 当Ω=10.13 rad/s时(见图5),时间响应图中的曲线的波峰经过了2次波动后回到初始波峰位置,相图中的曲线为2条封闭的曲线,庞加莱截面图中,投影为2个点,可判定系统在此点处进行2周期运动. 当Ω=10.26 rad/s时(见图6),时间响应图中的曲线的波峰经过了4次波动后回到初始波峰位置,相图中的曲线为4条封闭的曲线,庞加莱截面图中,投影为4个点,可判定系统在此点处进行4周期运动. 当Ω=10.32 rad/s时(见图7),时间响应图中的曲线的波峰没有周期性可循,相图中的曲线为无数条曲线的叠加,无法确定曲线数量,庞加莱截面图中,投影为一片点集,可判定系统在此点处进行混沌运动. 参考文献: [1] 叶建槐,刘占生.静态偏置对转子-密封系统稳定性影响的研究[J].振动与冲击,2010,29(s):69-71. [2] 崔颖,刘占生,叶建槐. 大型非线性转子- 密封- 轴承系统的不平衡响应与稳定性[J].振动与冲击,2011,5(30):205-217. [3] 叶建槐,刘占生.非线性转子-密封系统稳定性与分岔[J].航空动力学报,2007,22(5):1-3. [4] 成玫, 孟光, 荆建平. 非线性 “转子-轴承-密封” 系统动力分析[J].振动工程学报, 2006, 19(4): 519-524. [5] 向玲, 王子瑞, 唐贵基. 偏心量对转子-轴承-密封耦合系统非线性振动特性影响的分析[J].华北电力大学学报, 2012, 39(5): 59-64. [6] 向玲, 王子瑞, 唐贵基. 不确定转子耦合系统的经验参数研究[J].振动.测试与诊断, 2013,33(3): 450-455. [7] 成玫, 荆建平, 孟光. 转子-轴承-密封系统的非线性动力学研究[J].振动与冲击, 2006, 25(5): 171-174. [8] HUA J, SWADDIWUDHIPONG S, LIU Z S, et al. Numerical analysis of nonlinear rotor-seal system[J].Journal of Sound and Vibration, 2005, 283(3): 525-542. [9] 李永.转子-轴承-密封系统的非线性振动与分岔[D].大连:大连理工大学,2007. [10] CHENG M, MENG G, JING J. Numerical and experimental study of a rotor-bearing-seal system[J]. Mechanism and Machine Theory, 2007, 42(8): 1043-1057. [11] 李忠刚.转子-轴承-密封系统非线性动力学特性的研究[D].哈尔滨:哈尔滨工业大学,2007.
n=0.5~3;
τf=τ0(1-e)b,0
2 数值仿真


猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
检察风云(2022年10期)2022-06-02
水利规划与设计(2020年1期)2020-05-25
制造技术与机床(2018年10期)2018-10-13
柴油机设计与制造(2018年3期)2018-10-13
电子制作(2017年13期)2017-12-15
北京航空航天大学学报(2016年6期)2016-11-16
装备机械(2016年2期)2016-10-27
中国医药指南(2016年1期)2016-07-11