基于显著点提取的红外弱小目标检测
2014-03-27 02:02薛雅丽
云南民族大学学报(自然科学版) 2014年3期
李 莉,薛雅丽,杨 欣
(南京航空航天大学 自动化学院, 江苏 南京 210016)
红外弱小目标检测与跟踪是空间监视、早期预警、红外精确跟踪制导等领域涉及的一项关键技术.现有的红外检测跟踪算法有很多,一个好的红外检测跟踪算法或系统,需要有较高的正向检测率和较低的虚警率,以及较小的计算复杂度以实现信息的实时处理[1].
视觉注意机制是人类的一项重要的心理调节机制[2].在分析复杂图像时,视觉的信息处理方式是串行的,即采用了选择性注意机制.选择性表现为舍弃不突出的信息,从而更高效地处理重要信息.也就是说人们在观察一个场景时,总是有选择性地将注意力转移到场景中最具吸引力的内容上,并锁定该区域,然后通过快速的眼动扫描,将该区域转移到更高分辨率的视网膜中央,进行更细致的分析.由此可见,选择性注意机制在人类视觉完成复杂信息的处理任务时发挥着关键性的作用.近年来,国内外很多学者试图采用计算模型来描述视觉注意机制,并希望通过以此来解决计算机视觉中的一些问题,如自动目标识别中的目标检测.
本文将视觉注意机制用于红外弱小目标的检测.检测过程分为2个阶段,第1阶段为快速的bottom-up模式处理阶段,输入图像按照图像内容分割成若干个子区域,通过分析目标的显著性特点,计算图像中初始视觉特征,从而快速提取各个子区域中最具显著性的潜在目标点.在接下来的第2阶段进行与任务相关的、更为细致的top-down模式目标识别过程,采用改进的双滑窗算法进一步确认真实目标,剔除假目标,从而实现小目标检测.
1 快速的bottom-up预注意机制
选择性注意机制的第1阶段为bottom-up预注意模式处理,即通过扫描输入图像,在若干空间尺度上提取出相应的图像特征(颜色、灰度、方位),不同特征显著性描述的线性组合则为显著性图.显著性图决定和引导注意的焦点区域[3].在红外目标识别系统中,考虑到系统成本、运算速度等实际因素,通常使用仅提供灰度信息的单一传感器,不考虑多传感器的情形,因此文中仅考虑灰度特征,通过对图像中对象的灰度显著性分析,快速地搜索整个输入图像以得到感兴趣的候选目标点集合.这个集合中既包含了要检测的目标,同时也包含了一些伪目标点,且这个集合是输入图像的子集,它的数据量比原始数据量要小得多.
就目标检测而言,红外弱小目标的灰度值较周围高,目标表现为孤立的亮斑,即目标区域与背景区域存在灰度差,但是由于红外目标本身较小,加上背景噪声的影响,使得这个差值较小而难以检测,因此我们把目标放在某一个恰当小的局部区域内,在该区域内,目标具有灰度显著性,抽取区域内灰度值最大的1个或几个点作为候选目标点.
因此预注意模式阶段处理过程可以按图1进行.

1.1 图像的非均匀区域分割
基于以上分析,考虑到目标灰度值在局部区域内具有显著性,首先将输入图像分割成不同区域,求取所有区域内灰度值最大的一个或几个点来获得候选目标集合.进行区域分割时,姚讯、李德华等[4]采取等分的方式对输入图像进行分割,区域的大小与形状都是一致的,实际上,分割得到的区域大小和形状应该与该区域对象的分布相适应,对于灰度值变化平缓的区域,可将区域分割得大一些,而对于含有较多高频信号和变化复杂的区域,分割应该更为细致一些.因此为了提高算法的效率和效果,本文创新性地采用非均匀区域分割方法,使得分割后的区域大小与形状与该区域对象的分布趋于一致,从而更加符合实际情况.
常用的区域分割方法有2种基本形式:区域生长和分裂合并.区域生长需要人工交互以获得种子点,种子点的选择往往需要一定的先验知识[5].分裂与合并方法[6]虽然对分割复杂图像来说效果很好,但该方法的算法较复杂,不满足实时性的要求.因此本文中采用区域合并的方法来进行区域分割,即首先用某种方法把图像分割成许多小区域,再按照所定义的某些准则合并相邻区域,直到再无可合并的区域块为止.具体操作如下:
1) 将输入图像按水平和垂直方向分割成大小相等的区域.输入图像以Ω表示,将其长等分为n格,宽等分为m格,可得m×n个互不相交的区域Ωi,j,其中i=1,2,…,m;j=1,2,…,m;
2) 根据灰度统计特性对区域进行描述,如果相邻区域的属性值相似,例如灰度均值相似,则将该2个子区域进行合并;
3) 如果某区域不能与它周围的所有区域合并,则被标记为终结,当所有区域终结时,合并过程结束.
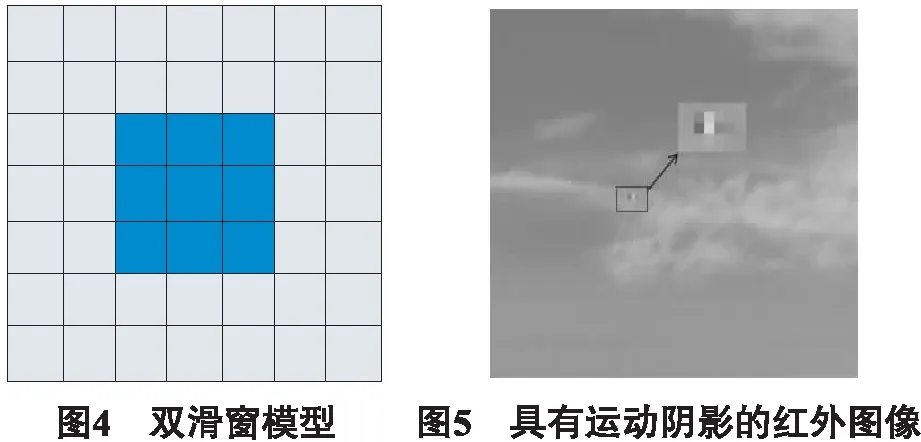
如用U(i,j)表示区域Ωi,j的灰度均值,选取阈值U,若|U(i,j)-U(i,j+1)| 图2为2幅包含弱小目标的红外图像Img1、Img2及采用上述方法得到区域分割图.其中图像Img1的分辨率为160×160像素,将图像等分为5×5小块,取阈值U为0.03进行区域合并;图像Img2的分辨率为28×128像素,将图像等分为3×3小块,取阈值U为0.05进行区域合并. 对于进行图像分割时已经标记为终结的区域,可以进行该区域内显著点的提取.从图2中可以看出,由于分割采用的是非均匀分割方法,使得每个区域的大小和形状都各不相同,要对区域分割得到的每个区域进行显著点提取必须先进行区域定位.我们可以通过区域的2个显著特点来进行区域定位: 1) 在区域分割好的图像上,属于同一区域的子块具有相同的灰度均值; 2) 同一区域内子块与子块之间形成一个连通域. 因此,具体进行区域定位的方法如下: 1) 对U(i,j)(i=1,2,…,m;j=1,2,…,m)按从大到小进行排序,均值不同的子块必然属于不同的区域. 2) 对于均值相同的子块,按照连通性的原则,判断所有子块是否属于同一区域. 实现区域定位后,由于目标灰度值在区域内具有一定的显著性,即目标灰度值应该是区域内灰度值最大的1个或几个,且目标灰度值应该大于区域灰度均值.因此对区域内大于区域均值的所有像素点按灰度值大小排序,得到一个顺序统计量,取这个顺序统计量的最大的若干个,可得到每个区域内的显著点.对于包含r个像素值的区域Ωi,j,ξi,j(k)表示Ωi,j中灰度值大于灰度均值U(i,j)的像素点,其中k=1,2,…,r.对这k个像素点进行从小到大的排序得到顺序统计量ξi,j(k),即有:ξi,j(1)≤ξi,j(2)≤…≤ξi,j(k).从ξi,j(k)中抽取最大的s个即可得到区域Ωi,j中的显著点的灰度值集合Zi,j={ξi,j(2)|m=k,k-1,…,k-s-1}. 图3为图像Img1、Img2进行显著点提取(s=3)后得到的显著点分布图.从图中可以看出通过bottom-up阶段处理后的图像中候选目标数比原始数据量小得多,这样可以有效地减少算法运行的时间,从而提高了算法的执行效率. 这一阶段根据具体的任务,调整选择准则,对已经提取的候选对象进行再次识别,再次识别成功的对象则被认为是目标对象.一般来说,检测的任务是判断目标是否出现在某个区域内.在此阶段,一些已有的空域算法和数学形态学的方法[7]可稍作修改应用于此.考虑到传统双滑窗算法[8]简单,易于实现,因此本文将传统双滑窗算法的思想应用于top-down处理阶段,并在传统算法的基础上稍作改动,使其对于复杂背景中的红外小目标也能具有较好的检测效果.在每一个候选目标点位置扩展2个大小窗口,如图4所示,图中小窗口可看做包含目标的区域,用表示该区域中所有的像素点的集合,Θmax表示该区域中像素的灰度最大值,Θm表示该区域所有像素的灰度均值. 大窗口区域用P表示,P中所有像素的灰度均值用Pm表示.假设当前候选目标点为真实目标,Θ为真实目标区域,由于P中包含了一部分背景,因此区域P的灰度均值Pm一般小于目标区域Θ的灰度均值Θm,由此得到传统双滑窗算法的原理:以像素点为中心开内、外2个窗口,内窗包含了当前像素点在内的n×n个像素,且内窗所有像素灰度均值为T1,外窗包含了当前像素在内的m×m个像素(其中m>n),且外窗所有像素灰度均值为T2,设定阈值T,判断当前像素点是否为红外小目标点的准则为:若T1-T2≥T,则认为该点为小目标点;反之,则认为该点属于背景. 传统双滑窗算法对大部分红外图像均具有良好的检测效果,但对于目标区域带有运动阴影的红外图像会造成误检.图5为一幅目标区域具有运动阴影的红外图像,图中箭头所指向的区域为放大的目标区域,从放大图中可以清楚地看到在目标临近位置有一些较暗的区域,暗区域的灰度值甚至低于其领域背景的灰度值,在这种情况下,采用传统的双滑窗检测算法势必会造成误检. 针对这种情况,我们对传统双滑窗算法进行改进,考虑到阴影的存在使得小窗口的灰度均值急剧下降,引入灰度最大值Θmax和最大值因子α(0<α<1)来削弱阴影的影响,设置内窗的灰度特征量T1=α·Θmax+(1-α)·Θm,外窗灰度特征量依然为外窗灰度均值Pm.选取灰度阈值T,对中心像素是否为小目标点的判断准则为:若T1-T2≥T,则认为该点属于小目标点;反之,则认为该点属于背景点. 基于以上分析,可以得出本文红外弱小目标算法: Step1 将输入图像按水平和垂直方向分割成大小相等的区域Ωi,j,用U(i,j)表示区域Ωi,j的灰度均值,其中i=1,2,…,m;j=1,2,…,m; Step2 选取阈值U,若|U(i,j)-U(i,j+1)| Step3 对非均匀分割图进行区域定位,对各个区域大于区域均值的所有像素点按灰度值大小排序,得到一个顺序统计量,取这个顺序统计量的最大的s个,得到每个区域内的显著点作为候选目标点; Step4 采用改进的双滑窗算法对每个候选目标点进行再次识别,去除伪目标点; Step5 输出再次识别成功的目标点位置. 实验采用美国空军实验室实测红外图像进行仿真实验,并列出与传统的双滑窗算法以及比较有代表性的基于数学形态学的Top-Hat算法的检测结果做比较,以此来验证本文算法的有效性.所有实验都对运行时间进行统计以验证算法的实时性.实验平台为Intel Pentium 4,1 GB内存的PC机,通过Matlab 2 009a软件平台完成仿真实验. 传统双滑窗算法对于目标区域带有运动阴影的红外图像会造成错误的检测结果.对于图5中具有运动阴影的红外图像,采用本文提出的方法对其进行检测,检测结果见图6. 采用本文算法对图6的检测时耗为 0.373 581 s,而传统的双滑窗算法进行检测的时耗为 2.788 641 s.由此可见本文算法在实时性与准确性上均优于传统的双滑窗算法. 先采用Top-Hat算法对图像Img3~Img6进行检测,该算法应用Top-Hat算子对背景进行预测,并将背景与原图进行比较,通过设置阈值判别目标,检测结果见表1. 从表1可以看出,对于红外图像Img3~Img6,Top-Hat算法没有有效处理背景区域,使得在进行阈值分割时,造成了较高的虚警,这些虚警可以通过后续的帧间处理方法消除,但是会增加额外的运算开销. 表1 Top-Hat算法与本文算法目标检测结果对比 从检测结果来看,对于图像Img3~Img6采用本文算法均能实现正确检测,而且由于本文算法无需进行背景预测,检测耗时相比Top-Hat算法要少.综合以上分析可知本文提出的算法鲁棒性强,既适用于目标区域带有运动阴影的红外图像,也适用于信噪比低的复杂红外图像.本文算法对于这2种红外图像均能实现正确检测,且检测所需时间也基本满足实时性要求. 本文的研究从人类视觉感知情况出发,将视觉注意机制引入到红外图像弱小目标检测应用中,提出了一个新的串行处理方法,该方法通过抽取输入图像的相关信息并对这些信息进行分析识别,在保持其他性能的前提下,大幅提高了运算效能. 参考文献: [1] JESMIN F K,MOHAMMAD S A. Target detection in cluttered forward-looking infrared imagery[J].Optical Engineering, 2005, 44(7):076-404. [2] OLSHAUSEN B A, ANDERSON C H, VAN ESSEN D C. A neurobiological model of visual attention and invariant pattern recognition based on dynamic routing of information[J].The Journal of Neuroscience, 1993, 13(11) : 4700-4719. [3] ITTI L, KOCH C.A model of saliency-based visual attention for rapid scene analysis[J].Pattern Analysis and Machine Intelligence,IEEE Transactions on, 1998,20(11):12-54. [4] 姚迅, 李德华, 黄飞, 等. 基于视觉注意机制的红外图像小目标检测方法[J].武汉大学学报: 工学版, 2006, 39(6):108-112. [5] 王蒙, 吕建平. 基于边缘检测和自动种子区域生长的图像分割算法[J].西安邮电学院学报,2011,16(6):16-19. [6] HOROWITZ S L. Picture segmentation by a tree traversal algorithm[J].Journal of the ACM,1976, 23(2):368-388. [7] BARNETT J. Statistical analysis of median subtraction filtering with application to point target detection in infrared backgrounds[C]//International Society for Optics and Photonics.Los Angeles,1989, 1050:10-18. [8] 刘兴淼, 王仕成, 赵静,等. 基于改进双滑窗的红外小目标检测算法[J].计算机应用,2011,31(5):1217-1220. [9] KITTLER J, ILLINGWORTH J, FOGLEIN J. Threshold selection based on a simple image statistic[J].Computer Vision, Graphics and Image Process, 1985,30(2):381-387. [10] 叶斌, 彭嘉雄. 基于形态学 Top-Hat 算子的小目标检测方法[J].中国图象图形学报: A 辑,2002, 7(7): 638-642.
1.2 提取区域内的显著点

2 top-down注意模式处理阶段
3 算法
4 实验与结果分析



5 结语
 猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02环球时报(2022-05-23)2022-05-23金桥(2021年4期)2021-05-21天津医科大学学报(2021年1期)2021-01-26智富时代(2019年4期)2019-06-01智富时代(2019年4期)2019-06-01电子制作(2019年7期)2019-04-25电子制作(2019年7期)2019-04-25自动化学报(2017年5期)2017-05-14浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02环球时报(2022-05-23)2022-05-23金桥(2021年4期)2021-05-21天津医科大学学报(2021年1期)2021-01-26智富时代(2019年4期)2019-06-01智富时代(2019年4期)2019-06-01电子制作(2019年7期)2019-04-25电子制作(2019年7期)2019-04-25自动化学报(2017年5期)2017-05-14浙江理工大学学报(自然科学版)(2015年7期)2015-03-01