
基于60°坐标系的SVPWM过调制算法*
2014-08-16 08:00唐校杨向宇赵世伟刘源晶
华南理工大学学报(自然科学版) 2014年8期
唐校 杨向宇 赵世伟 刘源晶
(华南理工大学 电力学院,广东 广州 510640)
空间矢量脉宽调制技术(SVPWM)由于有较高的母线电压利用率,而广泛应用于三相电压型逆变器的调制[1-3].传统SVPWM 是在两相静止坐标系αβ 中进行,对参考电压矢量所在扇区的判断和基本电压矢量作用时间的计算过程中涉及较多的三角函数运算,实际应用时占用了较多的计算时间.
在直流电压有限的情况下,经常采用过调制技术进一步提高母线电压利用率,增强逆变器的输出能力.已有不少文献对过调制技术进行了研究[4-10],一般需要根据调制系数来判断调制区,并且需要计算保持角,算法比较复杂.文献[8]中提出了一种过调制算法,不需要计算保持角,算法可以统一处理从线性区到六阶梯模式整个过程,不用区分电压矢量处于哪种过调制区,但基本电压矢量作用时间的计算依然复杂.
60°坐标系最初于三电平逆变器中提出,极大简化了SVPWM 算法[11-12].文中将60°坐标系应用于两电平逆变器,旨在说明算法依然能够获得简化的目的,并且在60°坐标系中实现SVPWM 过调制技术,充分利用60°坐标系的特点,算法不用计算保持角,可以统一处理整个调制区域,仅需要在60°坐标系SVPWM 算法的基础上增加少量工作即可完成过调制算法.文章最后通过实验验证了算法的正确性.
1 坐标变换及60°坐标系的特点
设采用的60°坐标系为gh 坐标系,g 轴与α 轴重合,h 轴逆时针超前g 轴60°,如图1 所示.

图1 αβ 坐标系和60°坐标系Fig.1 αβ coordinate system and 60° coordinate system
设电压矢量Vr在静止两相坐标系αβ 中的坐标为(Vrα,Vrβ),其在gh 坐标系中的坐标为(Vrg,Vrh).根据图1 可得

即

因此可得

可将式(3)写成矩阵形式

式(4)中矩阵C 为αβ 坐标系到gh 坐标系的变换矩阵.若直接由三相坐标系变换到gh 坐标系,且设变换矩阵为D,则

式中,C32为三相坐标系到两相静止坐标系αβ 的变换矩阵,其值为
根据图1,可知60°坐标系的特点如下:①同一水平线上各点的h 轴分量相等;②同一60°线上各点的g 轴分量相等;③同一120°线上各点的g 轴与h 轴分量的和相等.
以上60°坐标系的特点将为后面参考电压矢量的扇区判断带来便利.
2 直角坐标系中SVPWM 算法
直角坐标系指的是两相静止坐标系(αβ 坐标系),三相电压型逆变器共有8 个基本电压矢量,分别对应8 种开关状态,在αβ 坐标系中如图2 所示.

图2 αβ 坐标系基本电压矢量Fig.2 Basic voltage vectors in αβ coordinate system
SVPWM 的基本思想是按照空间矢量的平行四边形法则,用相邻的两个有效电压矢量合成期望的输出矢量[13].SVPWM 算法有两项基本工作:①参考电压矢量所在扇区的判断,以便选择基本电压矢量;②基本电压矢量作用时间的计算.
在αβ 坐标系中,扇区号的确定依据下面方法得到.先根据参考电压矢量的两个分量值计算B0、B1和B2

再计算P 值:

式中,sgn(x)是符号函数.P 值与扇区号的对应关系如表1 所示.

表1 P 值与扇区号的对应关系Table 1 Relationship between P and sector number
确定扇区号后便可以计算合成参考电压矢量的基本电压矢量的作用时间,即

3 60°坐标系中SVPWM 算法及过调制
根据式(5),将8 个基本电压矢量变换到gh 坐标系.以开关状态U1(100)为例,变换如下:

由式(10)可知开关状态U1(100)在60°坐标系中的坐标为U1(1 0).其它电压矢量可以根据相同的变换得到,如图3 所示.

图3 60°坐标系基本电压矢量Fig.3 Basic voltage vectors based on 60° coordinate system
对比图2 和3,gh 坐标系中开关状态位置与αβ坐标系中一致,三相开关状态的g、h 坐标值为整数0 或1 或-1.
3.1 扇区判断
根据60°坐标系的特点,由参考电压矢量Vr的g 轴坐标Vrg和h 轴坐标Vrh的大小判定参考电压矢量所在扇区.
(1)当Vrg+Vrh≥0 时,参考矢量位于扇区1 或扇区2 或扇区6:
①如果Vrg<0,参考矢量位于扇区2;
②如果Vrh<0,参考矢量位于扇区6;
③否则,参考矢量位于扇区1.
(2)当Vrg+Vrh<0 时,参考矢量位于扇区3 或扇区4 或扇区5:
①如果Vrh≥0,参考矢量位于扇区3;
②如果Vrg≥0,参考矢量位于扇区5;
③否则,参考矢量位于扇区4.
3.2 基本电压矢量作用时间计算
当参考电压矢量所在扇区判断后,也就确定了合成参考电压矢量所需的基本电压矢量.下一步则是计算各基本电压矢量的作用时间.当参考电压矢量位于图3 中的六边形以外时,实际输出电压矢量是不能达到的,这时可以保持矢量相角不变,将幅值压缩到六边形上.根据图3,实际输出电压矢量的g轴分量Vrg和h 轴分量Vrh的范围是[-1,1].将Vrg和Vrh的值分别向上和向下取整,可以得到4 个电压矢量.以图3 中参考电压矢量Vr'为例,可得

式中,下标U 表示向上取整,由上划线标示;下标L表示向下取整,由下划线标示.以VUL为例,它表示参考电压矢量g 轴分量向上取整,h 轴分量向下取整,其余类推.按照伏秒特性,可得

式中,V1=VUL,V2=VLU,V3=VLL或V3=VUU.根据图3,当参考电压矢量位于扇区1、3、5 时,V3=VLL;当参考电压矢量位于扇区2、4、6 时,V3=VUU.d1、d2和d3分别是基本电压矢量V1、V2和V3的占空比.
(1)当V3=VLL时,可以得到下面方程组
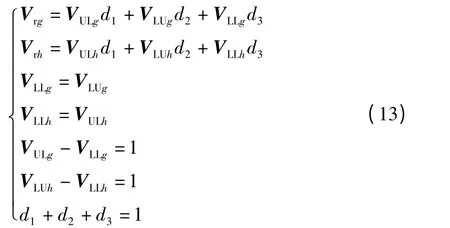
式中,VULg和VULh分别表示取整后的电压矢量VUL的g 轴分量和h 轴分量,其余类推.求解方程组(13),可以得到

(2)当V3=VUU时,可以得到下面方程组
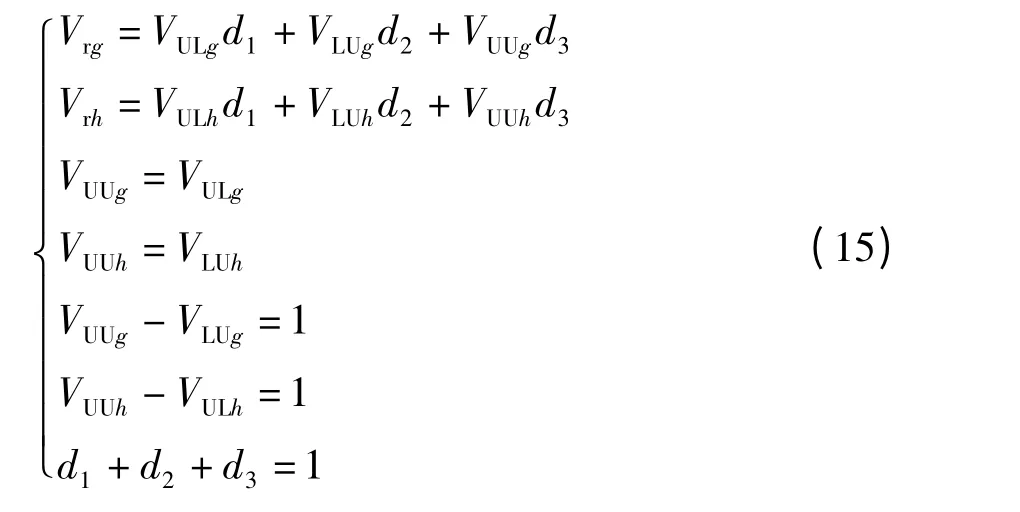
求解方程组(15),可以得到

由式(14)和(16)可见,60°坐标系中基本电压矢量作用时间的计算非常简单.需要注意的是,在αβ 坐标系中,计算得到的电压矢量作用时间与电压矢量在不同扇区具有固定的对应关系.但在60°坐标系中,不同扇区求解的d1、d2和d3与基本电压矢量并不具有固定的对应关系.例如图3 扇区1 中d3对应的是矢量(0 0)的作用时间,扇区2 中d3对应的是矢量(0 1)的作用时间.
3.3 60°坐标系中SVPWM 过调制算法
SVPWM 过调制技术可以进一步提高直流母线电压利用率,拓展逆变器输出电压的范围,其中六阶梯模式有着最高的母线电压利用率[10].60°坐标系中SVPWM 过调制区域如图4 所示.

图4 60°坐标系中SVPWM 过调制区域Fig.4 SVPWM over-modulation areas based on 60° coordinatesystem
图4 中有两个六边形,内六边形由基本电压矢量为顶点,与图3 一致,这个六边形内的区域称为线性调制区,参考电压矢量位于这个区间时,可以由基本电压矢量合成得到等效的实际输出电压矢量.
外六边形与内六边形外接圆相切.两个六边形之间的区域称为过调制区Ⅰ,当参考电压矢量位于过调制区Ⅰ,如图4 中的Vr1,实际输出的电压矢量与参考电压矢量保持相角不变,幅值压缩到内六边形的边界上,这是最小相角误差过调制方法.
过调制外六边形之外的区域称为过调制区Ⅱ,当参考电压矢量位于过调制区Ⅱ,如图4 中的Vr2,实际输出的电压矢量为六阶梯波模式,即一个周期实际输出电压矢量就是某个基本电压矢量,这属于最小幅值误差过调制方法.例如,当参考电压矢量位于扇区1 中的过调制区Ⅱ,实际输出电压矢量为U1(1 0)或者U2(0 1),这两个基本电压矢量的选择则是根据参考电压矢量与它们之间的夹角确定,选取与参考电压矢量夹角小的基本电压矢量作为输出矢量.只是在60°坐标系中并不需要计算实际夹角的大小来选择基本电压矢量,而是根据没有进行过调制处理时的基本电压矢量作用时间的大小来判定.
参考电压矢量所处扇区的判断根据3.1 节的内容进行,以参考电压矢量位于扇区1 为例说明整个算法的构成.这个扇区中,V1=VUL=U1(1 0),V2=VLU=U2(0 1),V3=VLL=U0(0 0).根据60°坐标系的特点“同一120°线上各点的g 轴与h 轴分量的和相等”可以判定参考电压矢量所处的调制区:①当Vrg+Vrh≤1 时位于线性调制区;②当1 <Vrg+Vrh≤1.155 时位于过调制区Ⅰ;③当1.155 <Vrg+Vrh时位于过调制区Ⅱ.其中,1.155 是图4 中圆半径值.在线性调制区时,依据式(14)计算基本电压矢量的作用时间,且VLLg=0,VLLh=0,因此

在过调制区Ⅰ时,将参考电压矢量Vr压缩到六边形的边界上V'r,它的g 轴分量和h 轴分量分别为V'rg和V'rh.此时零矢量没有作用时间,如图5 所示.

图5 60°坐标系中过调制区Ⅰ的基本电压矢量时间计算Fig.5 Charging time calculation in over-modulation area I based on 60° coordinate system
由于

所以求得


在过调制区Ⅱ时需要选择一个基本电压矢量作用整个控制周期,可以根据参考电压矢量的两个坐标值(Vrg,Vrh)做出选择.当Vrg≥Vrh时,说明参考电压矢量与U1的夹角小于参考电压矢量与U2的夹角,此时选择电压矢量U1作用整个周期,反之,则选择电压矢量U2作用整个周期.
60°坐标系中SVPWM 过调制算法流程图如图6所示,当参考电压矢量位于其它扇区时,可以类似计算.由图6 发现,在60°坐标系中可以很方便地判定参考电压矢量所处调制区域,并根据参考电压矢量的坐标值快速计算基本电压矢量的作用时间.
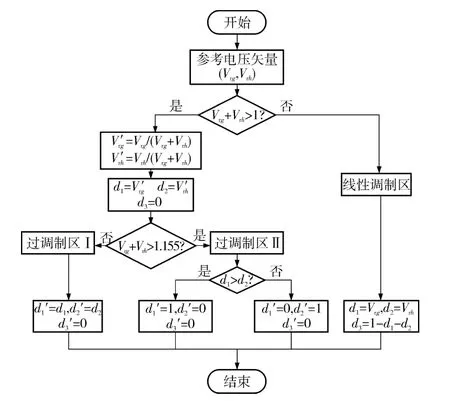
图6 60°坐标系中SVPWM 过调制算法流程图Fig.6 Flow chart of SVPWM over-modulation algorithm based on 60° coordinate system
4 实验分析
对60°坐标系中SVPWM 算法及其过调制处理进行了实验验证.基于TI 公司的2000 系列之TMS320F2812 实验平台,逆变器主电路采用的是三菱智能功率模块PS21865,最大工作频率为20 kHz.考虑模块工作的稳定性,将主电路工作频率设定为15 kHz.直流侧电压为20 V.逆变器外接一台小型永磁同步电机作为三相对称阻感性负载,电动机采用Y 型接法,单相电阻7.5 Ω,单相电感6 mH.
在TI 公司DSP 集成开发环境(CCS)中设置断点来统计代码执行的时间,对比60°坐标系中SVPWM和传统αβ 坐标系中SVPWM 算法.前者代码的执行时间为2620 个时钟周期,后者则为5 849 个时钟周期,发现60°坐标系中SVPWM 能节省50%的CPU执行时间.
由于永磁同步电机中性点没有引出,不方便检测相电压信号,因此文中只能检测线电压及相电流信号,以此来对比分析参考电压位于线性区和过调制区的波形.图7(a)、(b)、(c)分别为参考电压位于线性区、过调制区Ⅰ和过调制区Ⅱ的输出波形,上部分为线电压波形,下部分为相电流波形.电流钳设置为1 A 对应于100 mV.对比图7(a)-(c)可以发现,随着调制程度的加深,进入过调制区后,开关频率减小;参考电压矢量位于线性调制区时电流畸变小,进入过调制区后开始畸变,六阶梯波模式时畸变最厉害;进入过调制后,直流侧电压的利用率得以提高,这可以通过电流的幅值获得增大而得到证实.
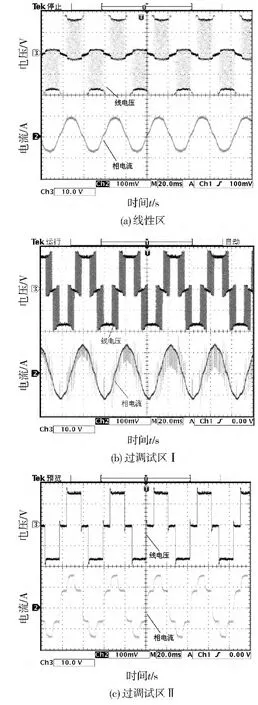
图7 不同区域实验波形Fig.7 Experimental waveforms in deferent modulation areas
5 结语
基于60°坐标系的SVPWM 算法涉及的参考电压矢量扇区判断和基本电压矢量作用时间的计算过程简单,相比传统正交坐标系SVPWM 算法能节省CPU 执行时间,更利于实时操作.由于60°坐标系的特点,过调制时使得两个过调制区的判断易于实现,在进入六阶梯波过调制区时,选择基本电压矢量时不需要计算参考电压矢量与基本电压矢量的实际夹角大小.过调制算法仅需要在原来的SVPWM 算法基础上增加少量语句即可实现.
[1]周卫平,吴正国,唐劲松,等.SVPWM 的等效算法及SVPWM 与SPWM 的本质联系[J].中国电机工程学报,2006,26 (2):133-137.Zhou Wei-ping,Wu Zheng-guo,Tang Jin-song,et al.A novel algorithm of SVPWM and the study on the essential relationship between SVPWM and SPWM[J].Proceedings of the CSEE,2006,26 (2):133-137.
[2]Holtz J.Pulse width modulation-a survey[J].IEEE Trans on Industry Electron,1993,39(6):410-420.
[3]黄守道,徐琼,祁宙,等.新的基于内置式永磁同步电机的弱磁控制策略[J].湖南大学学报,2013,40(1):55-57.Huang Shou-dao,Xu Qiong,Qi Zhou,et al.A novel fieldweakening control strategy for interior permanent magnet synchronous motor[J].Journal of Hunan University,2013,40(1):55-57.
[4]宋卫章,钟彦儒,魏西平,等.适用于双级矩阵变换器的空间矢量过调制策略[J].电工技术学报,2012,27(9):242-250.Song Wei-zhang,Zhong Yan-ru,Wei Xi-ping,et al.Space vector over-modulation strategy used for two-stage matrix converters[J].Transactions of China Electrotechnical Society,2012,27(9):242-250.
[5]Maeda Y,Inoue Y,Morimoto S,et al.Output power maximization of IPMSM using overmodulation region of direct torque control system[C]∥International Conference on Electrical Machines and Systems.Sapporo:IEEE,2012:1-6.
[6]Sahoo S K,Bhattacharya T,Aravind M.A synchronized sinusoidal PWM based rotor flux oriented controlled induction motor drive for traction application [C]∥Applied Power Electronics Conference and Exposition.Long Beach:IEEE,2013:797-804.
[7]王旭东,张思艳,余腾伟.SVPWM 过调制中控制角算法的分析与应用[J].电机与控制学报,2010,14(12):63-74.Wang Xu-dong,Zhang Si-yan,Yu Teng-wei.Control angle algorithm of SVPWM overmodulation analysis and application[J].Electric Machines and Control,2010,14(12):63-74.
[8]吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010,25 (1):58-63.Wu Fang,Wang Shan-ming,Huang Sheng-hua.An overmodulation algorithm and its application in PMSM drive with flux-weakening control [J].Transactions of China Electrotechnical Society,2010,25 (1):58-63.
[9]吕敬,张建文,王晗,等.SVPWM 过调制算法的理论分析与实验应用[J].电气传动,2011,41 (8):7-11.Lü Jing,Zhang Jian-wen,Wang Han,et al.Theoretical analysis and experimental application of overmodulation algorithm based on SVPWM[J].Electric Drive,2011,41 (8):7-11.
[10]于家斌,秦晓飞,郑军,等.一种改进型超前角弱磁控制算法[J].电机与控制学报,2012,16(3):101-106.Yu Jia-bin,Qin Xiao-fei,Zhang Jun,et al.Improved leading angle flux weakening control algorithm [J].Electric Machines and Control,2012,16 (3):101-106.
[11]赵辉,李瑞,王红君,等.60°坐标系下三电平逆变器SVPWM 方法的研究[J].中国电机工程学报,2008,28 (24):39-45.Zhao Hui,Li Rui,Wang Hong-jun,et al.Study on SVPWM method based on 60° coordinate system for threelevel inverter [J].Proceedings of the CSEE,2008,28(24):39-45.
[12]宋文胜,冯晓云,侯黎明,等.电力牵引传动系统的三电平直接转矩控制算法的半实物实验研究[J].电工技术学报,2012,27(2):165-172.Song Wen-sheng,Feng Xiao-yun,Hou Li-ming,et al.Hardware-in-loop research of three-level direct torque control scheme for electric traction drive system [J].Transactions of China Electrotechnical Society,2012,27(2):165-172.
[13]阮毅,陈伯时.电力拖动自动控制系统——运动控制系统[M].北京:机械工业出版社,2010:139.
猜你喜欢
南北桥(2022年2期)2022-05-31
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(趣味科学)(2021年6期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
童话世界(2018年32期)2018-12-03
电脑知识与技术·经验技巧(2017年9期)2018-02-24
学生导报·高中版(2017年23期)2017-09-10
学生导报·初中版(2017年23期)2017-09-10
西南交通大学学报(2016年4期)2016-06-15
现代防御技术(2016年1期)2016-06-01
