
X-Y型天线座构型设计*
2014-09-16 03:14李建军贾彦辉
电子机械工程 2014年5期
李建军,贾彦辉
(中国电子科技集团公司第五十四研究所, 河北 石家庄 050081)
X-Y型天线座构型设计*
李建军,贾彦辉
(中国电子科技集团公司第五十四研究所, 河北 石家庄 050081)
文中研究了天线座的工作原理及结构特征,由于A-E型天线座存在天顶的跟踪盲区,致使其无法完成过顶目标的跟踪任务。X-Y型天线座将天线的跟踪盲区转移到X轴的两端,即地平线上,因此可满足天线跟踪过顶目标的任务要求。同时,结合实际工程应用,提出了几种不同构型的X-Y座架型式,以及各自的技术指标及适用范围。文章面向实际任务进行机构设计,研究内容对于X-Y型天线座架设计具有重要的指导意义。
X-Y型天线座;A-E型天线座;跟踪盲区
引 言
天线座作为天线的支撑与定向装置,在伺服系统控制下,引导天线准确地捕获和跟踪目标,其机械性能直接影响到天线的射频特性及伺服功能[1]。
传统的天线座多为方位-俯仰(A-E)型结构,由2个相互垂直的转轴(A轴、E轴)组成,A轴为铅垂状态,E轴位于A轴上方,呈水平状态[2]。通过两轴的转动,使得天线波束覆盖整个空域。
A-E型天线座跟踪目标时,当目标仰角趋近于90°时,方位角速度趋近于无穷大。由于A轴速度不可能无限增加,因此,A-E型天线座跟踪目标时不可避免地存在盲区。为完成目标的过顶跟踪,引入了X-Y型天线座结构[3]。
1 X-Y型天线座工作原理
X-Y型天线座也有2个转轴(X轴、Y轴),两轴都是水平配置,互相垂直,Y轴位于X轴之上。这种类型的天线座也有盲区,但是不在天顶,而在X轴的两端,即地平线上,如图1所示。
X轴的角速度由目标在Y方向的运动引起,其大小取决于目标与X轴之间的距离,即:
(1)
式中:θ为Y轴角度(朝天为0°);R为天线与目标间距离;Vs为目标线速度。
天线跟踪目标过顶时,θ=0°,X轴的角速度最小;在跟踪靠近地平线的目标时,X轴的角速度最大。它的两个轴只需转动±90°,就能够覆盖整个空域。因此不需要高频旋转关节、滑环或电缆卷绕装置。
如图2所示,轨道高度为300km的圆轨道极轨卫星,已知其线速度Vs=7.72km/s,O为地球球心;G为天线位置;S0为目标地平点;S1为目标任意点。
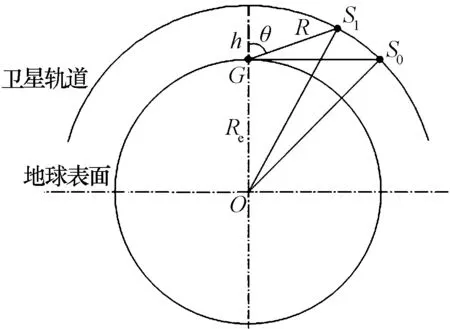
图2 天线与目标位置关系图
当目标位于S0时,θ=90°,X轴的角速度趋向于无穷大,天线不能跟踪目标。由于天线在低仰角时存在地面多径效应,为了很好地接收目标信号,地面站天线一般要求工作仰角为3°以上,这就正好避开了X-Y型天线座的跟踪盲区。
当目标位于任意位置S1时,根据ΔS1GO中三角函数关系可得:
已知Re=6 378 km,h=300 km,仰角3°时θ=87°,计算得R=1 673 km。
将R代入式(1)可得ωX=5°。
因此,与A-E型相比,X-Y型天线座既具备了跟踪过顶目标的能力,又大大降低了两轴的驱动转速。
2 X-Y型天线座构型设计
2.1 全配重构型
X-Y型天线座结构不紧凑,重量较大,因为两根转轴都不与地面垂直,如果转动部分的重心不在转轴上,就会产生不平衡力矩。传统的X-Y型天线座两轴都需要配重,所以体积、重量大,两轴的间距大,转动惯量也大。下面以X频段5.4 m X-Y型天线为例介绍。
5.4 m X-Y型天线包括反射体、X轴装置、Y轴装置、底座4部分,如图3所示。
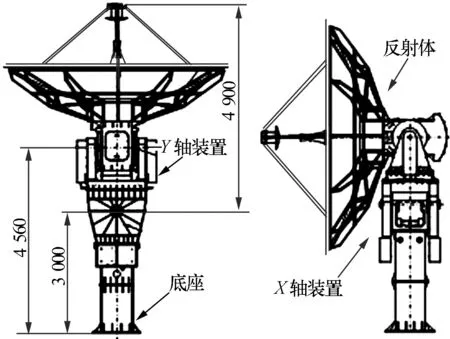
图3 全配重X-Y型天线
结构性能指标如下:
1)X、Y轴运动范围:-90°~90°;
2)X、Y轴驱动速度:0.01~5 °/s;
3)X、Y轴驱动加速度:0.01~5 °/s2。
Y轴装置采用叉臂方箱结构,位于X轴上端。随着X轴的转动,Y轴的姿态在水平与垂直方向不断改变,如图4所示。
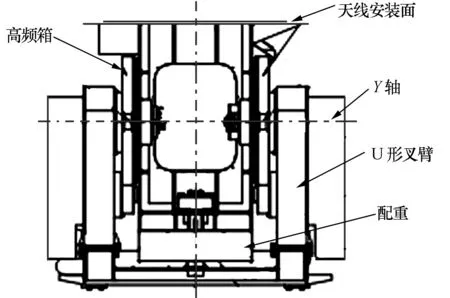
图4 Y轴装置示意图
在U形叉臂中间安装高频箱,其中容纳天线高频系统。高频箱上端面与天线连接,尾部安装配重,用以平衡天线反射体相对Y轴的不平衡力矩。由于配重相对于Y轴力臂较短,因此,所需配重较多。
叉臂的跨距和高度取决于高频箱的体积和Y轴的位置,驱动、限位、锁定及测角机构分别位于左右叉臂之中。
Y轴与U形叉臂固定,高频箱两侧通过圆锥轴承与Y轴连接。叉臂两端各安装一套驱动机构,同时驱动高频箱两侧的齿轮,使得高频箱带动天线作Y轴运动。
X轴装置采用挂臂方箱结构,用于支撑5.4 m天线反射体以及Y轴装置,如图5所示。
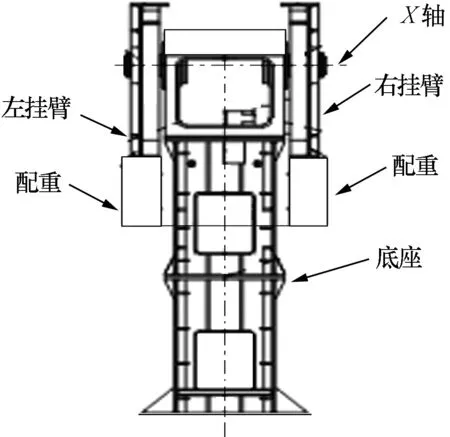
图5 X轴装置示意图
方箱内容纳X轴装置部分的驱动、限位、锁定及测角机构,X轴由2个半轴头组成,分别通过圆锥轴承与方箱两侧相连。在X轴两侧安装挂臂,挂臂上端面与Y轴装置连接,下端安装配重,用以平衡天线反射体及Y轴装置相对X轴的不平衡力矩。
方箱下平面固定在底座上,内部容纳X轴装置的驱动、限位、锁定及测角机构。X轴与方箱固定,左、右挂臂通过圆锥轴承安装在X轴两侧。挂臂上端面与Y轴装置连接,下端安装配重,用以平衡天线反射体及Y轴装置相对X轴的不平衡力矩。
驱动机构共2套,同时驱动左、右挂臂的大齿轮,实现Y轴装置及天线做X轴运动。
如图4所示,Y轴高度4 560 mm,X轴高度3 000 mm,天线回转直径9 880 mm,总重量10 900 kg,两轴驱动功率各为3 000 W。
该构型天线座两轴均需配重,天线座体积及重量较大,转动惯量大,刚度低,因此运动速度、加速度受限,天线快速响应能力较差。由于两轴均为平衡状态,因此,驱动功率较低。
2.2 无配重构型
由于全配重X-Y型天线的尺寸和重量较大,制约了产品的推广和应用。为了降低重量,减小工作空间,本节介绍一种无配重X-Y型天线构型。
仍以X频段5.4 m天线为例,其结构性能指标同上,天线包括反射体、X轴装置、Y轴装置、底座4部分,如图6所示。
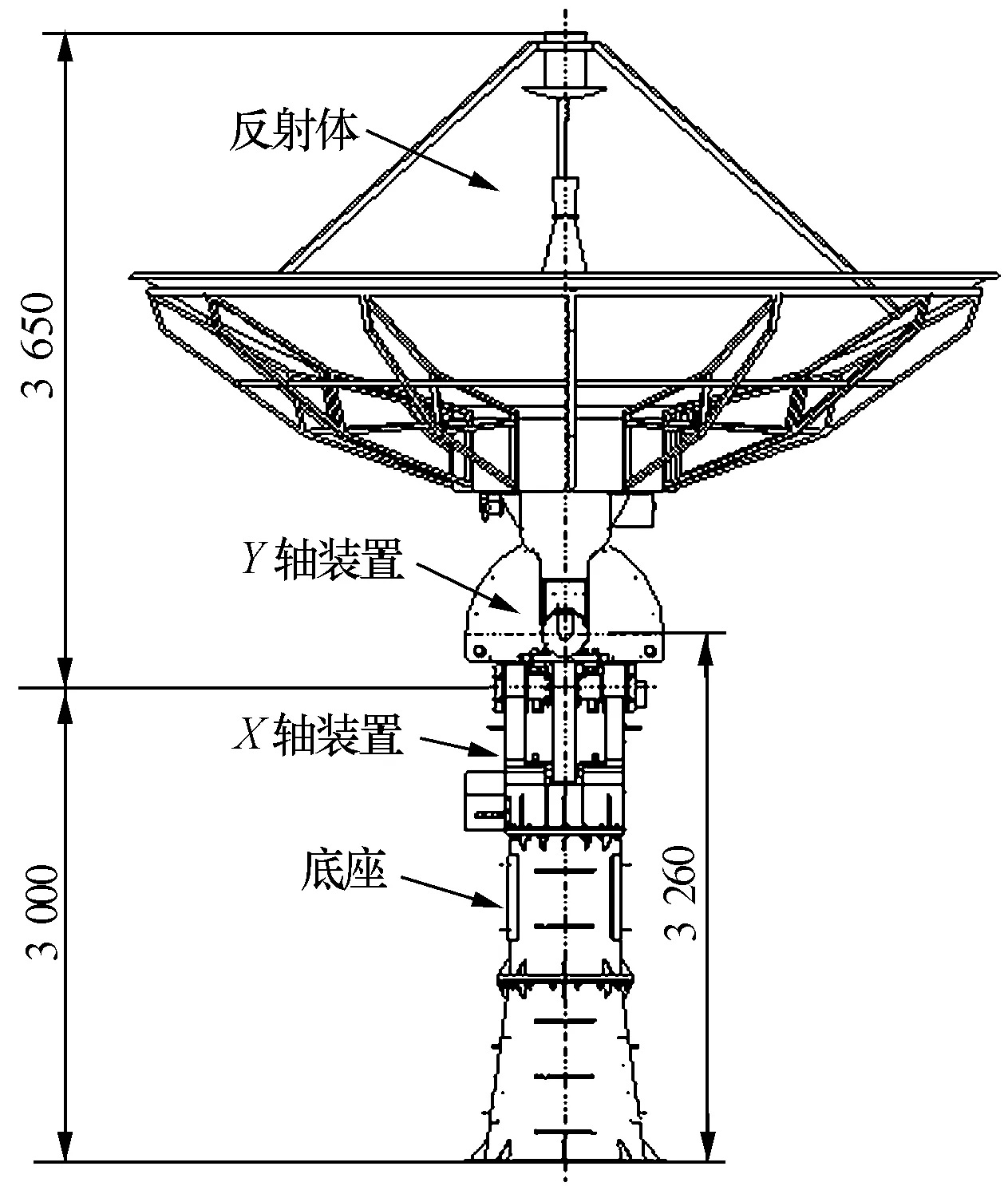
图6 无配重X-Y型天线
X轴装置和Y轴装置结构相同,正交安装,主要包括电机、减速机、末级齿轮弧、支臂、码盘、限位机构等零部件,如图7所示。
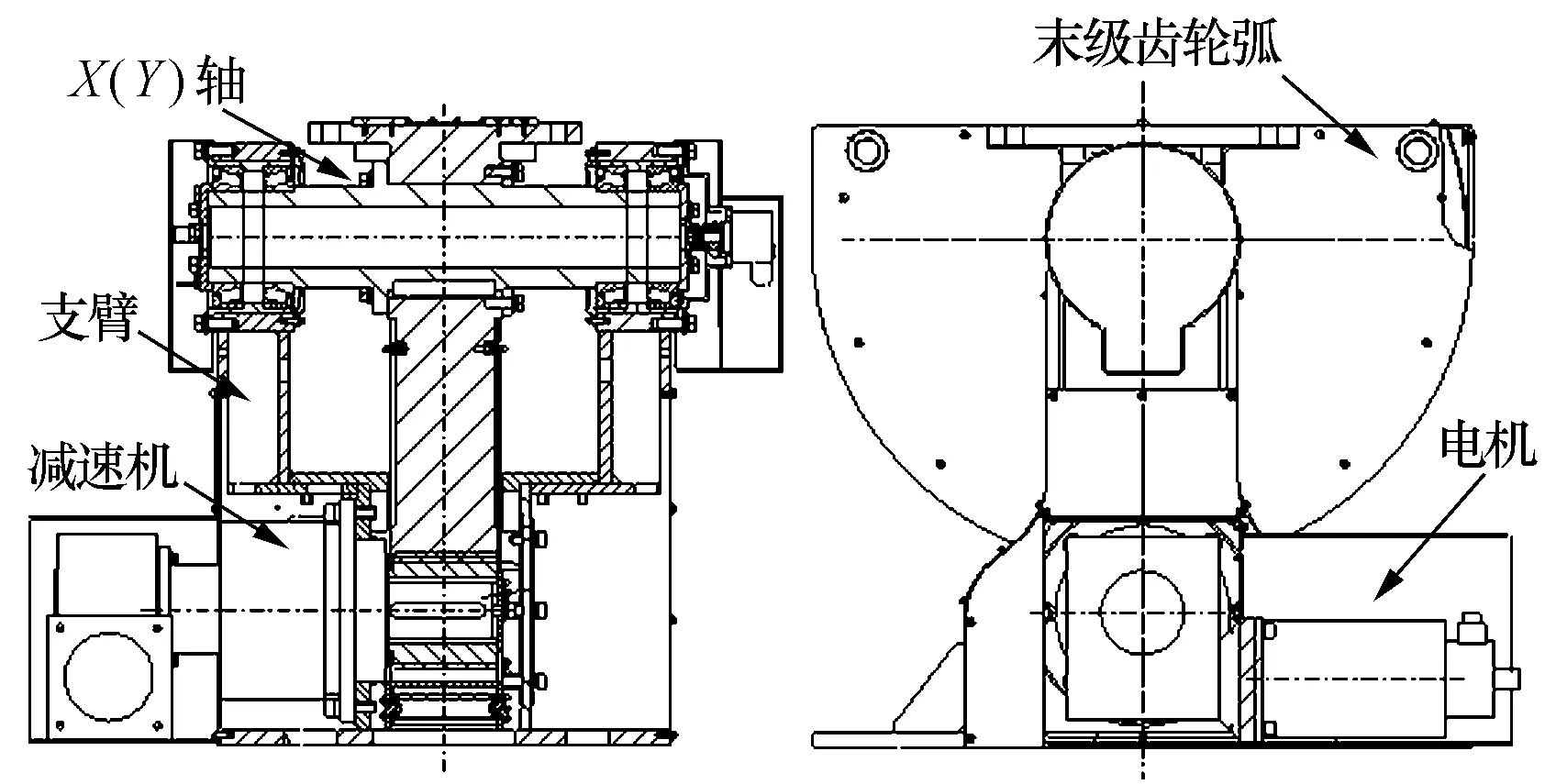
图7 X(Y)轴装置示意图
X(Y)轴为整体轴,两端通过圆锥轴承支撑在支臂左右。末级齿轮弧安装在X(Y)轴中间。电机、减速机安装在支臂底部,输出小齿轮与末级齿轮弧啮合,组成闭合的驱动机构。在X(Y)轴的一侧安装码盘,实时输出X(Y)轴角度信号。
X轴装置的支臂底平面固定在底座上,Y轴装置的支臂底平面支撑天线,两轴的末级齿轮弧平面连接固定,轴线垂直相交。
此时,Y轴装置的电机、减速机位于支臂上部,工作时,末级齿轮弧与Y轴固定不动,驱动系统带动支臂及天线绕着末级齿轮弧圆周滚动,实现天线做Y轴运动。
X轴装置的电机、减速机位于支臂下部。工作时,驱动机构及支臂固定不动,X轴与末级齿轮弧转动,实现Y轴装置及天线做X轴运动。
该构型的5.4 m X-Y型天线X(Y)轴均没有配重,天线工作在偏心状态。为保证天线能够反向自锁,高速级采用蜗轮减速机,利用其自锁功能保证天线安全工作。直齿轮副位于传动链末级,精度高,加工、装配质量容易保证。
如图7所示,由于无配重,该构型天线的体积和重量较原来大幅度减小。Y轴高度3260mm,X轴高度3 000 mm,天线最大回转直径7 300 mm,总重量3 800 kg,两轴驱动功率各为6 000 W。
由于传动链采用了蜗轮蜗杆副,因此该构型天线运动速度、加速度受限,天线快速响应能力较差。由于两轴均工作在偏心状态,因此驱动功率较大。
2.3X轴虚轴构型
某船载X-Y型天线对于体积、重量、驱动功率的要求都比较严格。为了补偿船摇带来的角度偏差,要求天线运动速度、加速度较高,需要两轴全方位平衡。上述两种构型均不能满足使用要求,因此设计了全配重X轴虚轴构型。
仍然是X频段5.4 m天线,其结构性能指标同上。天线包括反射体、X轴装置、Y轴装置、底座4部分,如图8所示。
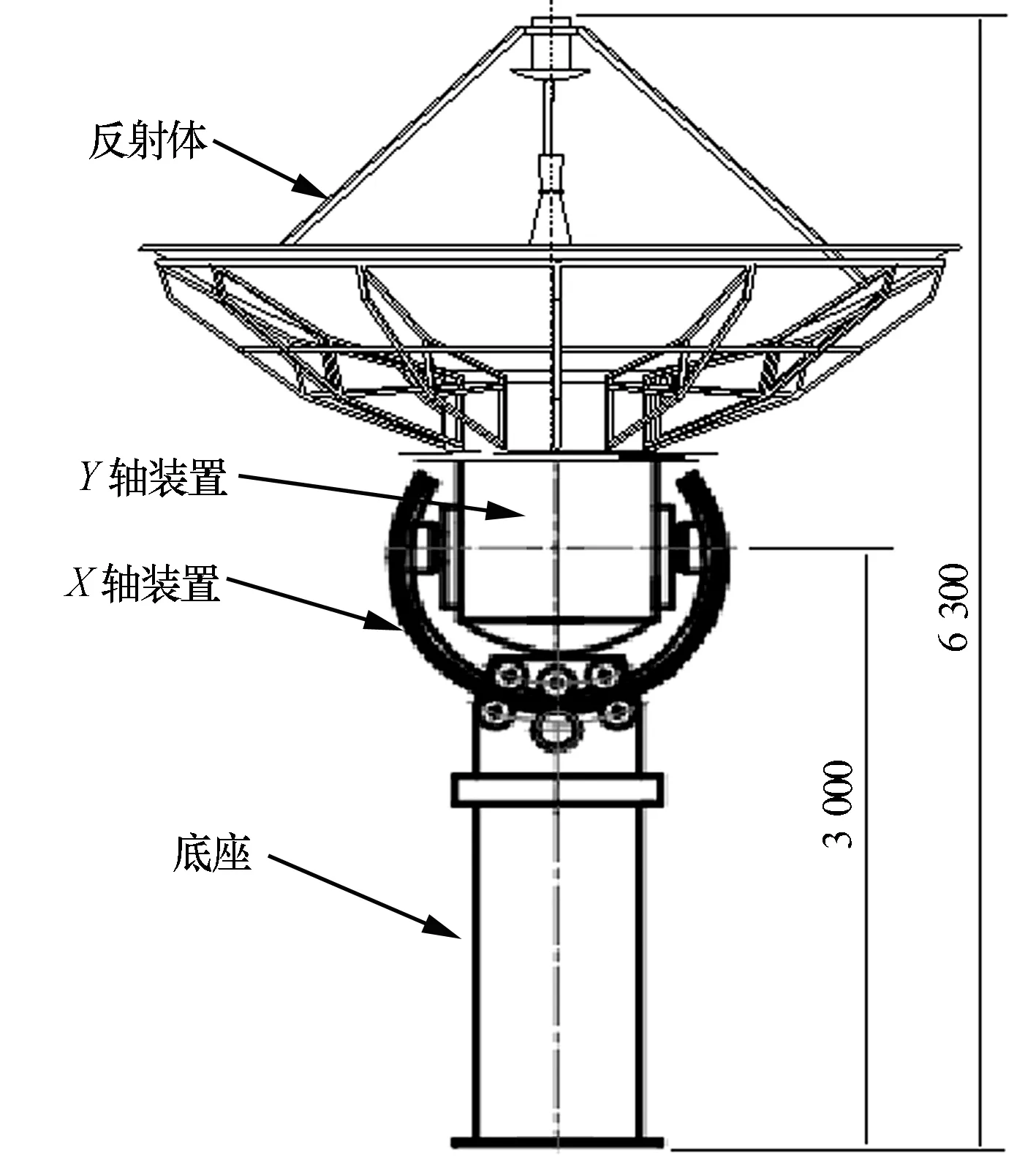
图8 全配重虚轴X-Y型天线
X轴装置主要包括圆弧滚道、滚轮支架、压紧滚轮、导向滚轮、减速机、电机、码盘、机电限位装置等零部件,如图9所示。
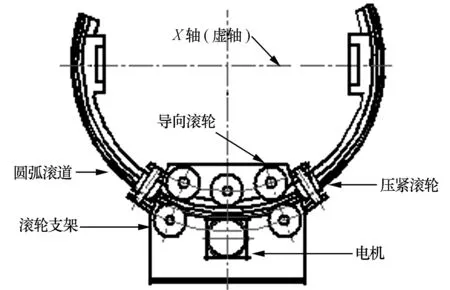
图9 X轴装置
滚轮支架固定在底座上,其上安装5对上下布置的压紧滚轮,对X轴装置的圆弧滚道进行支撑定位;另有2对左右布置的导向滚轮对圆弧滚道进行导向,防止其左右偏摆。滚轮既承受径向力,又能承受由于滚道的左右偏摆引起的轴向力。
电机通过减速机驱动圆弧滚道背面的齿轮,从而带动圆弧滚道作X轴旋转。圆弧滚道的几何轴心即为X轴,它是一个虚轴。
Y轴装置包括箱体、大齿轮、左右轴头、配重、减速机、伺服电机、码盘、机电限位装置等零部件,如图10所示。

图10 Y轴装置
Y轴装置的中心箱体通过左右轴头支撑在X轴装置的圆弧滚道上,箱体的上平面与天线相连。伺服电机通过减速机驱动Y轴大齿轮,从而带动中心箱体和天线一起做Y轴旋转。在Y轴的右轴头上安装码盘,实时输出天线座Y轴角度信号。
天线在X轴=0°,Y轴=0°状态,X、Y轴距离安装底平面约为3 000 mm。天线最大回转半径为6 600 mm,总重量4 500 kg,两轴驱动功率各为3 000 W。
该构型天线座两轴全方位平衡,X、Y轴垂直相交,因此,传动链不需要自锁。天线体积、惯量、驱动功率大大降低。重量较无配重构型稍大,远低于全配重构型。因此,天线可满足较高的运动速度、加速度要求。
3 结束语
由于A-E型天线座架存在天顶的跟踪盲区,不能满足任务需求,从而引出了X-Y型天线座架。分析了X-Y型天线的工作原理及使用范围,根据天线的应用需求,详细介绍了X-Y型天线的3种不同构型,并从体积、重量、功耗等方面加以比较。研究内容紧密结合工程实际,对于X-Y型天线工程化设计具有重要的理论指导意义。
[1] 吴凤高. 天线座结构设计[J]. 西安: 西北电讯工程学院出版社, 1975.
[2] 成大先. 机械设计手册[M]. 北京: 化学工业出版社, 2002.
[3] 张燕. 过顶跟踪的天线座设计方法[J]. 无线电工程, 1997, 27(4): 37-39.
李建军(1970-),男,高级工程师,主要研究方向为天伺馈系统结构设计。
贾彦辉(1984-),男,工程师,主要研究方向为天伺馈系统结构设计与力学分析。
Configuration Design of X-Y Style Antenna Pedestal
LI Jian-jun,JIA Yan-hui
(The54thResearchInstituteofCETC,Shijiazhuang050081,China)
This article studies the working theory and structure character of antenna pedestal. Because of the zenith tracking blind zone, A-E style antenna pedestal could not satisfy the tracking demand. X-Y style antenna pedestal moves the blind zone to the two sides ofXaxis (the horizon), therefore satisfying the tracking demand. According to the project applications, several different configurations of X-Y style pedestals are proposed, including their specifications and applicability. The design in this article is project-oriented, therefore its results have important guidance meaning for the design of X-Y style pedestals.
X-Y style antenna pedestal; A-E style antenna pedestal; tracking blind zone
2014-03-06
TN820.8+2
A
1008-5300(2014)05-0037-04
猜你喜欢
水泵技术(2022年3期)2022-08-26
指挥控制与仿真(2022年4期)2022-08-19
导弹与航天运载技术(2022年2期)2022-05-09
水力发电(2021年1期)2021-04-15
中国特种设备安全(2020年11期)2020-06-09
无损检测(2019年7期)2019-07-25
水电站机电技术(2019年1期)2019-01-22
商品与质量(2018年34期)2018-12-06
电子制作(2018年8期)2018-06-26
指挥控制与仿真(2018年3期)2018-06-11
