机载MIMO雷达两级降维空时自适应处理方法
2014-11-17 07:15张剑云郑志东
数据采集与处理 2014年4期
王 珽 张剑云 郑志东
(1.解放军信息工程大学导航与空天目标工程学院,郑州,450001;
2.合肥电子工程学院,合肥,230037;3.北方电子设备研究所,北京,100083)
引 言
多输入多输出(Multiple-input multiple-output,MIMO雷达是近几年发展起来的一种新体制雷达,具有诸多优点,已成为世界各国研究的热点。目前,根据MIMO雷达收发特性,将MIMO雷达分为两种类型:统计 MIMO 雷达[1,2]和相干 MI-MO雷达[3]。统计MIMO雷达阵元采用大间隔配置方式,发射波从不同角度照射目标,充分利用空域信息克服目标闪烁效应,进而提高目标检测性能。而相干MIMO雷达不受大距离分置的限制,并且利用波形分集技术,MIMO雷达采用较小的天线规模即可形成很大的虚拟阵列孔径,这在一定程度上克服了机载应用背景下传统雷达天线孔径和重量受载机平台严格限制的缺点,因而更适合于机载环境,能够提高雷达的角度分辨率和杂波抑制能力[4]。
空时自适应处理(Space-time adaptive processing,STAP)主要目的即为抑制地杂波,进行地面动目标显示(Ground moving target indication,GMTI)。经过近40年的发展,对于机载相控阵雷达而言,STAP技术已趋于成熟[5,6]。如今,这项技术又被进一步推广到MIMO雷达系统中,MIMO雷达STAP迅速成为国际雷达界的一个研究热点。文献[4]首次提出了MIMO-STAP的概念;文献[7]得到发射波形全正交时理想机载MIMO雷达杂波自由度估计的扩展Brennan准则。文献[8]建立了码分正交MIMO模式(c-MIMO)和频分正交 MIMO模式(f-MIMO)的通用STAP信号模型。文献[9,10]定量分析了MIMO雷达发射波形相关性对于杂波自由度的影响。文献[11]利用先验知识约束,实现了基于知识辅助的降秩MIMOSTAP。文献[12]对于存在孤立干扰的非均匀杂波环境下MIMO-STAP进行研究。
与传统相控阵STAP类似,MIMO-STAP的实现需要大量独立同分布(Independent identical distribution,i.i.d)样本数,且算法所涉及到高维协方差矩阵估计与求逆的运算量巨大。已有的针对相控阵STAP降维方法经过修改后可用于MIMO雷达,以缓解 MIMO-STAP问题,如经典的1DT 和 mDT 方法[13](又称 FA 和 EFA 方法[14])。其基本思想是在时域对各阵元输出作深加权的多普勒滤波处理,然后在空域选取m(m通常取1,3等)个相邻多普勒通道输出作空域Capon自适应处理。然而由于发射波形分集,MIMO-STAP将传统的空-时二维处理扩展到空-时-码(波形)三维空间[7]。导致传统mDT方法在多普勒滤波后仍然面临着发射-接收二维波束形成问题,处理器维数依然很高,在实际应用中受限。文献[15]提出一种先时域多普勒滤波,然后在空域将高维权矢量转化为两个低维权矢量分别进行求解的降维方法。但是,该方法需要采用双迭代算法进行低维权矢量求解,且迭代次数难以确定。
本文在mDT方法的基础上,提出一种先时域后空域的两级降维MIMO-STAP方法。该方法首先通过多普勒滤波进行时域降维处理,然后将mDT方法面临的空域二维波束形成问题分离成两个一维波束形成问题,使得空域发射-接收二维波束形成权矢量重构为发射权矢量和接收权矢量Kronecker积形式,并将高维权矢量转化为两个低维权矢量进行分别求解,能够有效降低算法运算量及对i.i.d样本数的要求。
1 机载MIMO雷达杂波模型
图1给出了MIMO雷达载机的几何关系模型。假设雷达载机以速度V沿X轴正方向做匀速直线飞行,载机高度为H。MIMO雷达天线阵列方向垂直于载机飞行方向,收发阵列均为正侧面配置均匀线阵,其中发射阵元数为M,间距dt,接收阵元数为N,间距dr=λ/2(λ为雷达工作波长),发射阵元全向发射,接收阵元全向接收。杂波散射单元方位角为θ,俯仰角为φ,锥角为ψ。由几何关系可知cosψ=cosθcosφ。
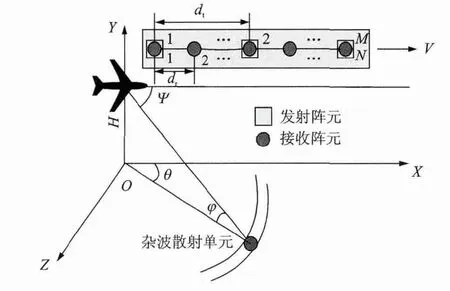
图1 机载MIMO雷达系统结构图Fig.1 Configuration of airborne MIMO radar
在一次相干处理间隔(Coherent processing interval,CPI)内,载机移动距离远小于雷达与杂波间的斜距,即雷达与杂波源的相对几何关系保持不变。时间域相干脉冲数为K。令M×Ns维矩阵S各行向量代表各发射信号序列,其中Ns代表发射信号编码长度,由MIMO雷达各阵元发射信号的正交特性可以得到

式中:(·)H表示复共轭转置,IM为M×M维单位阵。
假设杂波源统计特性在空间上相互独立,时间上相关平稳,且在每一个距离环内杂波无起伏。在第l个距离环内第i个杂波散射单元所对应的M×1维发射导向矢量和N×1维接收导向矢量分别为
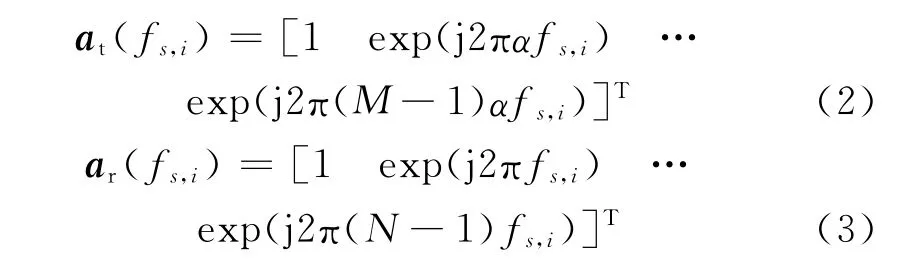
式中:(·)T表示转置,fs,i=drcosθicosφl/λ为归一化空间角频率,α=dt/dr,l=1,…,L,L即为距离参考单元样本总数。
在第k个脉冲周期,对同一距离环的杂波单元累加,得到第l个距离环的接收杂波信号,表示为
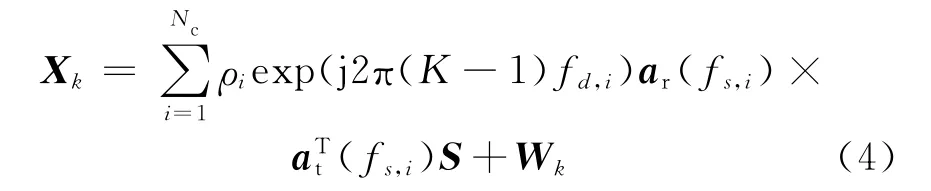
式中:fd,i=2VTcosθicosφl/λ为归一化多普勒角频率,T为脉冲重复周期;Nc为距离环内杂波散射单元数;ρi为第i个杂波单元散射系数,服从零均值复高斯分布;Wk为N×Ns维零均值高斯噪声矩阵,k=1,…,K。
利用参考发射信号进行匹配滤波输出为
定义K×1维时域多普勒导向矢量为

式中β=fd,i/fs,i=2VT/dr。
将K个脉冲数据按列依次堆栈,得到MNK×1维空时杂波数据矢量
式中:v(fs,i,fd,i)=b(fd,i)⊗at(fs,i)⊗ar(fs,i)为空时二维导向矢量;vec(·)表示向量化操作,⊗ 表示 Kronecker积
由于发射波形分集,MIMO-STAP将传统的空-时二维处理扩展到空-时-码(波形)三维空间[7],数据维数高达MNK,实际中难以获取大量独立同分布参考单元,且算法运算量问题尤为突出,难以满足实时处理要求。因此,应当针对 MIMOSTAP研究有效的降维处理方法。
2 时域多普勒预滤波
理想情况下对于正侧面阵,杂波谱在空时二维平面沿对角线分布[5]。mDT 算法[13,14]的基本原理即,首先采用多普勒滤波将分布于整个空域的杂波局域化,然后选取相邻m个多普勒通道输出数据进行降维处理。以m=3为例,3DT算法降维变换矩阵表示为

式中:G= [b(fd,-1)b(fd,0)b(fd,1)]表 示 由多普勒导向矢量构成的时域滤波器组,fd,0表示目标通道的多普勒频率,fd,-1和fd,1表示与目标通道左右相邻的多普勒通道频率。若令fs,0为归一化的目标空间频率,则降维后的数据矢量和目标空时二维导向矢量可分别表示为

降维STAP转化为如下的最小化问题

式中:w为mMN×1维处理器权矢量;Rz=为降维后的杂波和噪声协方差矩阵,实际中通常由采样协方差矩阵估计值=代替。则可以得到该最小化问题解为
由式(11)可以看出,经过时域多普勒预滤波,降维MIMO-STAP转化为发射-接收二维波束形成问题,尽管处理器维数与全空时STAP相比有所降低,但仍高达mMN。因此算法所要求的i.i.d样本数L≥2mMN[16],在实际环境中难以满足;并且对协方差矩阵进行估计和求逆的计算复杂度为O(Lm2M2N2)+O(m3M3N3),严重影响了算法的实时性。因此,考虑对空域做进一步的降维处理。
3 空域降维自适应波束形成
针对在机载MIMO雷达体制下直接采用mDT方法运算复杂度高,所需样本数大的问题,利用MIMO雷达发射-接收分维处理思想[17],在空域对发射-接收二维波束形成做进一步的降维处理,分离成两个一维波束形成问题。
3.1 降维算法基本原理
将时域降维后等效发射导向矢量at(fs,0),接收导向 矢 量ar(fs,0)简记为at,ar,同时降维后mMN×1维数据z可以表示为N×mM维矩阵形式
将式(11)中的发射-接收二维波束形成权矢量w表示成发射波束形成权矢量和接收波束形成权矢量的级联形式

即分解为发射波束形成权矢量wt∈CmM×1和接收波束形成权矢量wr∈CN×1。
则式(11)约束优化问题可以表示为

引入常用的公式[18]

可以得到

式(15)即等价为
其中式(18)中约束条件可以进一步分解,则有
下面对wt和wr分别进行求解。
接收端第一个阵元的接收数据为

由于式(20)中仅含有mM×1维发射导向矢量信息,则利用式(12)形式可以得到

此时可以利用拉格朗日乘子法构造代价函数

取定wt,对J(wt,wr,λ)关于wr求梯度并令其等于零,得到

即在空域处理中首先由式(21)计算发射波束权矢量wt,将其代入式(23)中得到接收波束权矢量wr,再利用w=⊗wr即可求得最终权矢量w,从而将mMN×1高维权矢量w转化为mM×1维权矢量wt和N×1维权矢量wr进行分别求解,实现了空域的进一步降维处理。
3.2 训练样本数与运算复杂度分析
本文提出的方法仅需对mM×mM维协方差矩阵Rt和N×N维协方差矩阵Rr进行估计和求逆,因此所需样本数L只需大于或等于2即可,算法运算复杂度为而直接应用 mDT算法所需样本数L≥2mMN,运算复杂度为O(Lm2M2N2)+O(m3M3N3)。由于通常有因此本文样本数及运算复杂度均远低于常规mDT方法,同时与文献[15]算法相比,本文方法权值求解过程无需进行迭代运算,因此运算量相比文献[15]进一步减小,更为简便,易于实现,是一种有效的降维机载MIMO雷达降维空时自适应杂波抑制算法。为便于比较,将直接mDT和本文降维mDT两种算法所需样本数与运算复杂度如表1所示。
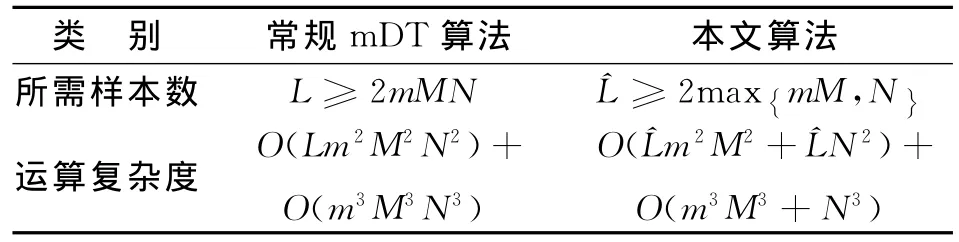
表1 两种算法所需快拍数和运算复杂度比较Table 1 Comparison of two method′s sample number and computational complexity
4 仿真实验
仿真实验参数设置为:载机速度V=140m/s,载机高度H=8 000m,波长λ=0.23m,脉冲数K=32,脉冲重复频率fr=2 434.8Hz。发射阵元数M=8,接收阵元数N=10,阵元间距dt=dr=0.115m。各距离单元杂波相互独立,单元杂噪比CNR=60dB。试验中假设雷达检测方向始终为载机正侧视方向,即归一化空间频率fs,0=0。发射信号采用正交多相码,码长Ns=256。对于1DT方法时域多普勒滤波采用-70dB切比雪夫加权以压低副瓣。
改善因子(Improvement factor,IF)是衡量STAP处理性能的通用指标,它是输出信杂噪比SCNRo和输入信杂噪比SCNRi之比[5]。图2给出了在检测多普勒频率fd,0=0.25时,直接mDT方法和本文降维mDT方法的收敛曲线图,为100次Monte Carlo实验平均结果。直接1DT和3DT起始样本数为80和240,即分别保证样本数L=MN和L=3MN,此时刚好满足多普勒滤波后协方差矩阵Rz满秩,从而可逆[19]。而降维1DT和降维3DT方法起始样本数分别为10和24。通过比较发现,本文降维mDT方法收敛速度快,且在小样本情况下性能优于直接mDT方法。由此可见,本文算法能够有效降低对运算量和参考单元的需求,在难以获取大量i.i.d样本的实际杂波环境中优势明显。普勒频率变化曲线。从图中可以看出,在m=1和m=3两种情况下,降维mDT方法性能均优于对应的直接mDT方法,能够改善最小可检测速度。
图4给出了4种方法的自适应空域方向图。即在目标多普勒频率fd,0=0.25条件下进行5次为进一步说明本文算法在小样本条件下的优越性,在仿真实验中对于m=1和m=3,样本数分别设为80和240,即保证协方差矩阵可逆的最小样本数。图3给出了4种方法的改善因子随归一化多独立实验,每种方法输出5条空域响应曲线。从图中可以看出,由于杂波谱在空时二维平面沿对角线分布,各种方法均能自适应地在fs,0=0.25杂波处形成凹口,但1DT和3DT方法方向图在各自试验之间起伏较大,且主副瓣难以区分,畸变严重。而降维1DT和降维3DT方向图具有明显的主瓣和较低的副瓣,且在杂波处零陷较深,具有很强的方向图保形能力。因此,可以说明降维mDT方法在小样本条件下具有更好的稳健性。

图2 改善因子随样本数变化曲线Fig.2 Curves of improvement factor with changing sample number
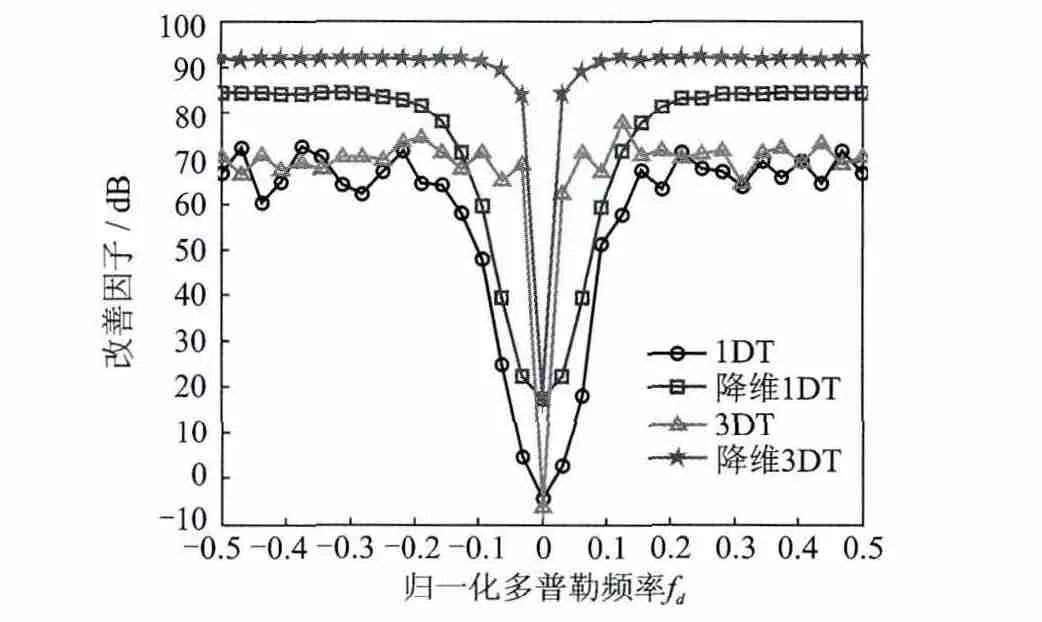
图3 改善因子性能比较Fig.3 Comparison of improvement factor

图4 5次独立试验空域方向图Fig.4 Spatial beampattern by 5independent trials
5 结束语
直接将经典mDT方法应用于机载MIMO雷达杂波抑制时,受样本数及运算量问题的制约。为此,本文在mDT方法的基础上提出一种两级降维MIMO-STAP方法,进一步降低处理器维数。本文算法采用先时后空的处理方式,即先采用多普勒滤波实现时域固定结构降维,而后对空域发射-接收波束形成权矢量分别求解实现空域降维。通过仿真试验表明,本文算法收敛速度快,运算量小,在小样本条件下具有良好的杂波抑制性能,有利于工程实现。
[1]Fisher E,Haimovich A,Blum R S.Spatial diversity in radar-models and detection performance[J].IEEE Transactions on Signal Process,2006,54(3):823-838.
[2]Haimovich A M,Blum R S,Lenard J.MIMO radar with widely separated antennas[J].IEEE Signal Process Magazine,2008,25(1):116-129.
[3]Li J,Stoica P.MIMO radar with collocated antennas[J].IEEE Signal Process Magazine,2007,24 (5):106-114.
[4]Bliss D W,Forsythe K W.Multiple-input multipleoutput(MIMO)radar and imaging:degrees of freedom and resolution[C]∥Conference Record of the 37th Asilomar Conference on Signals,Systems and Computers.[S.l.]:IEEE Press,2003:54-59.
[5]王永良,彭应宁.空时自适应信号处理[M].北京:清华大学出版社,2000.Wang Yongliang,Peng Yingning.Space-time adaptive processing[M].Beijing:Tsinghua University Press,2000.
[6]Klemm R.Principles of space-time adaptive processing[M].London:The Institution of Electrical Engi-neers,2002.
[7]Chen C Y,Vaidyanathan P P.MIMO radar spacetime adaptive processing using prolate spheroidal wave functions[J].IEEE Transactions on Signal Processing,2008,56(2):623-634.
[8]Wu Yong,Tang Jun,Peng Yingning.Models and performance evaluation for multiple-input multipleoutput space-time adaptive processing radar[J].IET Radar,Sonar & Navigation,2009,3(6):569-582.
[9]Wang Guohua,Lu Yilong.Clutter rank of STAP in MIMO radar with waveform diversity[J].IEEE Transactions on Signal Processing,2010,58 (2):938-943.
[10]张西川,张永顺,谢文冲,等.机载相干MIMO雷达杂波自由度估计研究[J].电子与信息学报,2011,33(9):2125-2131.Zhang Xichuan,Zhang Yongshun,Xie Wenchong,et al.Research on the estimation of clutter rank for coherent airborne MIMO radar[J].Journal of Electronic & Information Technology,2011,33 (9):125-2131.
[11]陆达,张弓.知识辅助的机载 MIMO雷达降秩STAP算法[J].数据采集与处理,2012,27(4):429-435.Lu Da,Zhang Gong.Knowledge-aided reduced-rank STAP algorithm for airborne MIMO radar[J].Journal of Data Acquisition and Processing,2012,27(4):429-435.
[12]李彩彩,廖桂生,朱圣棋,等.一种抑制严重非均匀杂波的机载 MIMO-STAP方法[J].电子学报,2011,39(3):511-517.Li Caicai,Liao Guisheng,Zhu Shengqi,et al.An airborne MIMO-STAP method for severely non-homogeneous clutter suppression[J].Acta Electronica Sinica,2011,39(3):511-517.
[13]保铮,廖桂生,吴仁彪,等.相控阵机载雷达杂波抑制的时-空二维自适应滤波[J].电子学报,1993,21(9):1-7.Bao Zheng,Liao Guisheng,Wu Renbiao,et al.2-D temporal-spatial adaptive clutter suppression for phased array airborne radars[J].Acta Electronica Sinica,1993,21(9):1-7.
[14]Dipietro R C.Extended factored space-time processing for airborne radar systems[C]∥ Proceedings of the 26th Asilomar Conference on Signals,Systems,and Computers.Pacific Grove,CA:IEEE,1992:425-430.
[15]吕晖,冯大政,和洁,等.机载MIMO雷达两级降维杂波抑制方法[J].电子与信息学报,2011,33(4):805-809.LüHui,Feng Dazheng,He Jie,et al.Two-stage reduced-dimension clutter suppression method for airborne MIMO radar[J].Journal of Electronic &Information Technology,2011,33(4):805-809.
[16]Reed I S,Mallett J D,Brennan L E.Rapid convergence rate in adaptive arrays[J].IEEE Transactions on Aerospace and Electronic Systems,1974,10(6):853-863.
[17]Zhang Xiaofei,Xu Dazhuan.Angle estimation in MIMO radar using reduced dimension capon[J].IET E-lectronics Letters,2010,45(12):860-861.
[18]张贤达.矩阵分析与应用[M].北京:清华大学出版社,2004.Zhang Xianda.Matrix analysis and applications[M].Beijing:Tsinghua University Press,2004.
[19]Papoulis A,Pillai S U.Probability,random variables and stochastic processes[M].New York:McGraw-Hill,2001.
猜你喜欢
车主之友(2022年4期)2022-08-27
科学与信息化(2021年30期)2021-12-24
湖南林业科技(2021年3期)2021-12-02
海峡姐妹(2019年12期)2020-01-14
计算机应用与软件(2016年6期)2016-07-19
火控雷达技术(2016年1期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
燕山大学学报(2014年1期)2014-03-11
现代防御技术(2014年6期)2014-02-28