机动目标双基地ISAR越距离单元徙动校正算法
2014-11-17 07:15郭宝锋尚朝轩高梅国王俊岭姜洪伟
数据采集与处理 2014年4期
郭宝锋 尚朝轩 高梅国 王俊岭 姜洪伟
(1.军械工程学院电子与光学工程系,石家庄,050003;2.北京理工大学雷达技术研究所,北京,100081)
引 言
双基地雷达是发射机和接收机分开放置的雷达系统,该系统收发分置的工作方式使雷达在对抗“四大威胁”方面具有突出的优势[1]。双基地ISAR是基于双基地雷达平台的ISAR系统,在具备“四抗”特性的同时,它利用接收的目标非后向散射回波进行成像,能够较单基地雷达获取更加丰富的目标信息。
双基地ISAR利用距离多普勒原理进行成像时,与单基地ISAR类似,经理想的运动补偿[2]后,就转化为转台模型[3]。由于目标相对收发双站雷达的转动,会引起散射点的MTRC现象,尤其是目标尺寸较大或目标转角较大时,距离目标相位中心较远的散射点会越过多个距离单元,难以实现对同一距离单元回波的相干累加,导致ISAR图像的模糊、错位,严重时使目标不能成像[4-6]。
单基地ISAR进行MTRC校正主要通过极坐标格式算法[7,8](Polar format algorithm,PFA)和Keystone变换[9,10]实现。PFA是聚束SAR成像中的常用算法,它采用极坐标方式录取回波数据,通过对极坐标的插值转换到直角坐标系下,然后通过二维FFT重建目标图像,该算法在小目标远场条件下能有效地精确消除MTRC。双基地情况下,收发分置使得回波数据在频域发生偏转,回波不仅需要插值,还需要进行旋转处理,步骤复杂、运算量大,同时,该方法需要精确已知目标的转动参数,并且隐含了双基地雷达严格同步的假设[11],因此,PFA算法在双基地ISAR中的应用受到很大的限制。Keystone变换是一种伸缩变换,通过对回波时频面的不均匀采样,补偿宽带信号距离频率域和方位慢时间域的线性距离走动。在双基地ISAR中,Keystone变换只能补偿双基地角变化产生的等效转动速度[12-14],而对机动目标的快时间频率和慢时间高次耦合项无法消除。
本文基于转台模型,针对解线频调后的回波信号,对机动目标的MTRC问题进行研究,分析了产生MTRC的原因,将MFT应用到机动目标双基地ISAR的MTRC校正中,仿真验证了方法的有效性。
1 双基地ISAR转台模型
图1为双基地ISAR转台模型,T和R分别为发射站和接收站,双基地角为β,O点为目标质心,以O为原点,以双基地角平分线为y轴建立直角坐标系。目标上的某散射点P(xP,yP)以旋转速度ω绕O点转动,OP长度为d,起始时刻与x轴夹角为θ。
发射站雷达以脉冲重复周期PRT发射线性调频信号

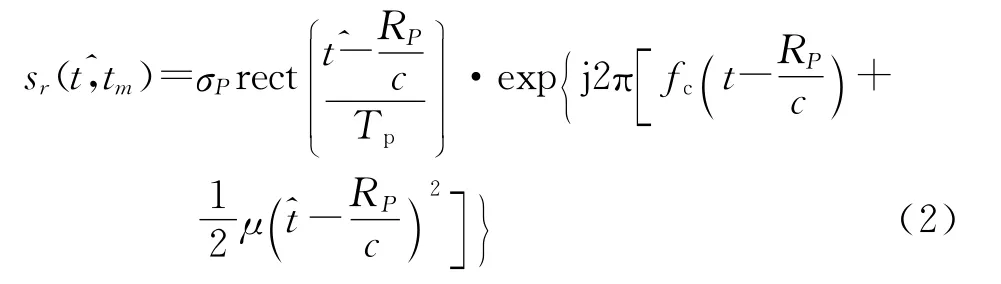
设P点的散射系数为σP,到收发双站的距离和为RP,即RP=RTP+RRP,则接收站雷达接收到的回波信号为
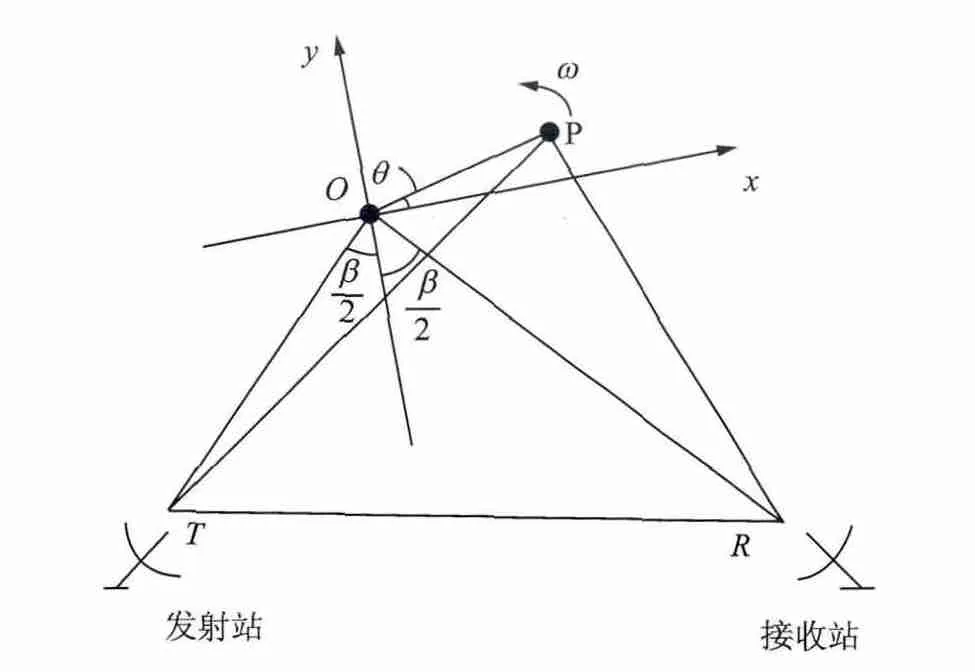
图1 双基地ISAR转台模型Fig.1 Turntable model of bistatic ISAR
假设双基地雷达理想同步,对回波信号解线频调处理,取参考距离Rref=RTO+RRO,参考信号为

Tref为参考信号的脉宽,它比Tp要大一些。则解线频调后的差频输出为
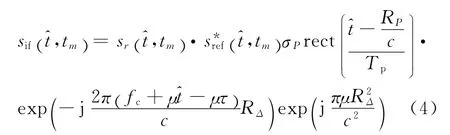
式中:τ=Rref/c,RΔ=RP-Rref,第一相位项的相位变化使回波产生多普勒,这是正常的。第二个相位项是解线频调方法所特有的,称为剩余视频相位(Remaining video phase,RVP),它对多普勒的影响很小[8],因此,差频输出可进一步表示为

式中:RΔ是慢时间的函数,RD算法对转台模型成像时,分别对差频输出的快慢时间域作二维傅里叶变换即可。
2 双基地ISAR的MTRC机理
对式(5)在快时间域作傅里叶变换

式(6)即双基地ISAR的一维距离像表示,sinc函数的峰值位置对应着散射点相对雷达的距离信息。指数相位项是慢时间的函数,包含了散射点方位信息,对式(6)的每个距离单元在慢时间域作傅里叶变换即可得到目标二维像。
对机动目标,经运动补偿后的等效旋转速度是慢时间的函数,可设旋转角速度ω=ω0+atm++……,其中ω0是初始角速度,a为角加速度,b为角加加速度,为下文分析方便,这里取前三项,即ω=ω0+atm+,则在tm时刻,OP旋转角度Δθ为

双基地雷达系统中,目标尺寸远小于收发双站距离,即d<<RTO,RRO,P到收发双站的距离分别为RTP,RRP,则
则P到收发双站距离与参考距离之差为

考虑到ISAR成像时,成像时间一般很短,此时Δθ<<1,故

将式(11)代入(6)式,得

可见,该变化量正比于目标方位尺寸和成像的转角。由于发射脉冲宽度为Tp,变换到频域的分辨率为1/Tp,若则散射点未发生MTRC。结合式(13),得

上式右端即是双基地雷达的距离分辨率,左端是散射点在距离方向转动产生的位移。即,散射点转动转过的距离不超过双基地雷达的一个分辨单元,就不会产生MTRC。对于尺寸较小的目标容易满足式(14)的要求,但对于大型飞机、国际空间站、卫星碎片等目标,尺寸在数十米量级,尤其是现在成像雷达发射信号带宽较宽,距离分辨率在分米甚至厘米量级,成像时很难满足式(14)的条件,这种情况下,散射点很可能不止越一个距离单元,直接影响方位分辨时的相参积累效果。
从以上分析可知,目标相对雷达的转动既是实现方位分辨的条件,又是产生MTRC的根本原因。
3 基于MFT的MTRC校正
3.1 匹配傅里叶变换
匹配傅里叶变换,是近年来由王盛利等人提出的一种信号检测与参数估计分析工具[15,16],它是变采样处理技术的基础,它可将对应信号在匹配傅里叶频域最大限度的集中。任一形式的信号在经不同基的匹配傅里叶变换后,其匹配傅里叶谱是不一样的,这样可以通过MFT,使有用信号得到集中。匹配傅里叶变换的一般形式是

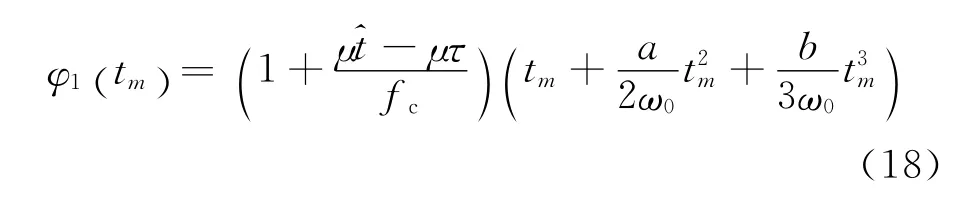
该变换通过选择与原信号匹配的基函数,实现最佳频谱输出。以某一线性调频信号s(t)=exp为例,取φ(t)=t+t2,其FFT及MFT如图2所示。可以看出,直接对线性调频信号进行FFT,频谱能量发散,而MFT有单一峰值出现在50Hz处,并且对应信号的能量在匹配傅里叶谱中集中。
3.2 双基地ISAR的MTRC校正机理
大尺寸目标或大转角情况下,式(6)的时频平面已经发生了MTRC,欲消除MTRC,需返回到式(5)表示的时域中,并将式(11)代入得
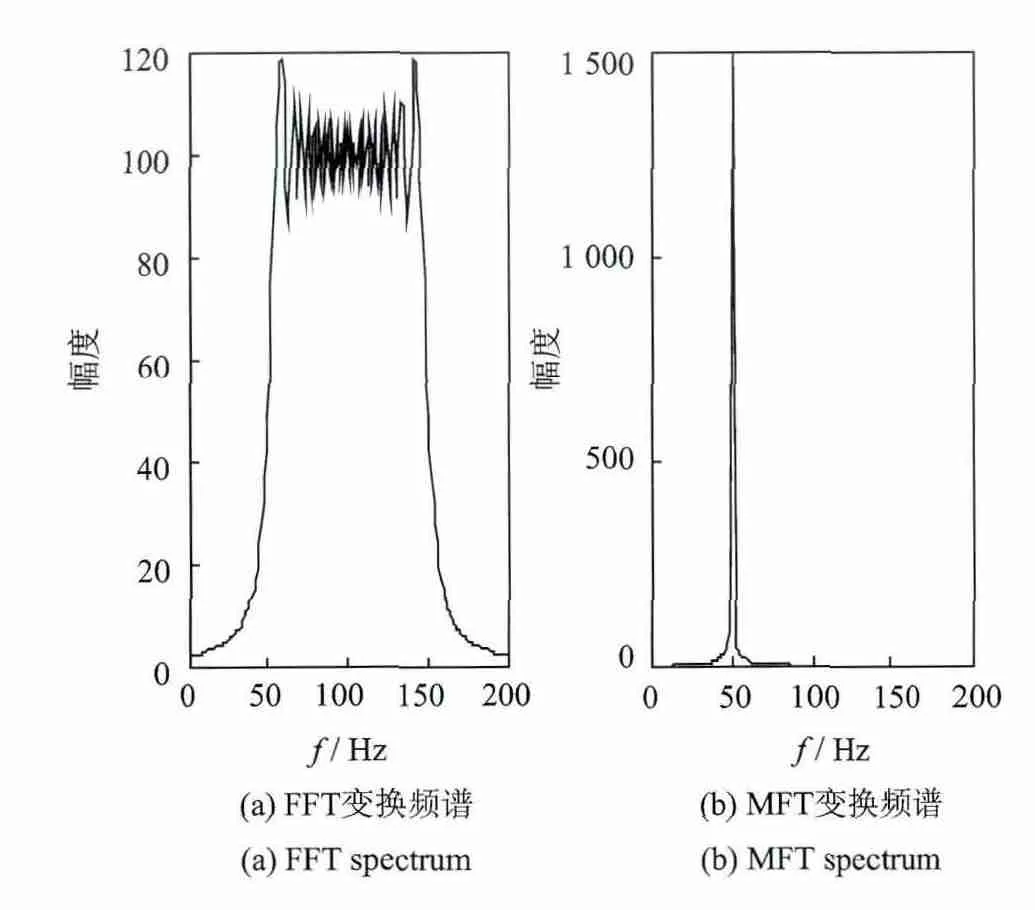
图2 线性调频信号的FFT和MFT频谱Fig.2 FFT and MFT spectrum of LFM

式(16)中,第一个指数相位项既有慢时间项,又包含了快时间与慢时间一次、二次及高次的耦合项,该耦合项是式(12)sinc函数的频率与慢时间产生耦合的原因,即产生MTRC的原因,消除该项的耦合作用就能解决MTRC。第二个指数相位项是快时间的单一函数,是散射点纵坐标的函数,用于实现距离的分辨。最后的指数项为初始相位,不影响成像效果。
3.3 基于MFT的MTRC校正
式(16)中与产生MTRC有关的指数项记为
令:

上式可看出,通过选择合适的基函数,对慢时间作MFT,输出多普勒频谱的峰值始终在f=处,消除了快慢时间之间的耦合。对式(19)做IFFT,返回到时域,即
对式(20)在快时间域做FFT,得一维距离像
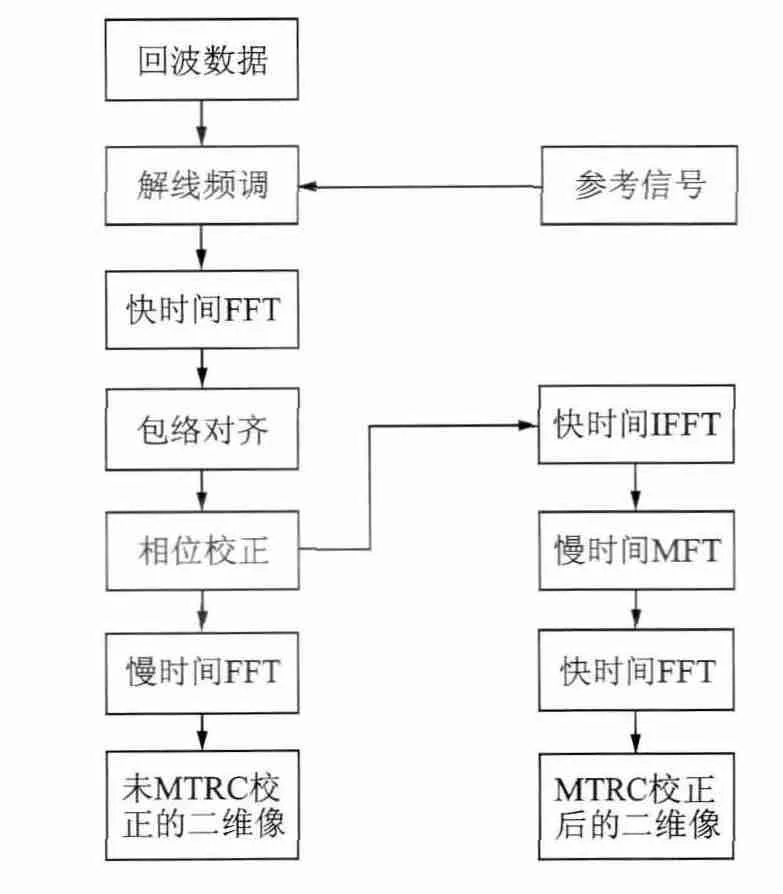
图3 基于MFT的MTRC校正流程Fig.3 Flow chart of MTRC correction based on MFT
4 仿真实验及结果分析
用本文的基于MFT的双基地ISAR MTRC校正方法,分别对匀加速旋转目标和匀加速直线运动目标进行仿真实验。双基地雷达与目标的空间结构如图4所示,目标散射点模型如图5所示。

图4 双基地ISAR仿真场景Fig.4 Simulation scene of bistatic ISAR
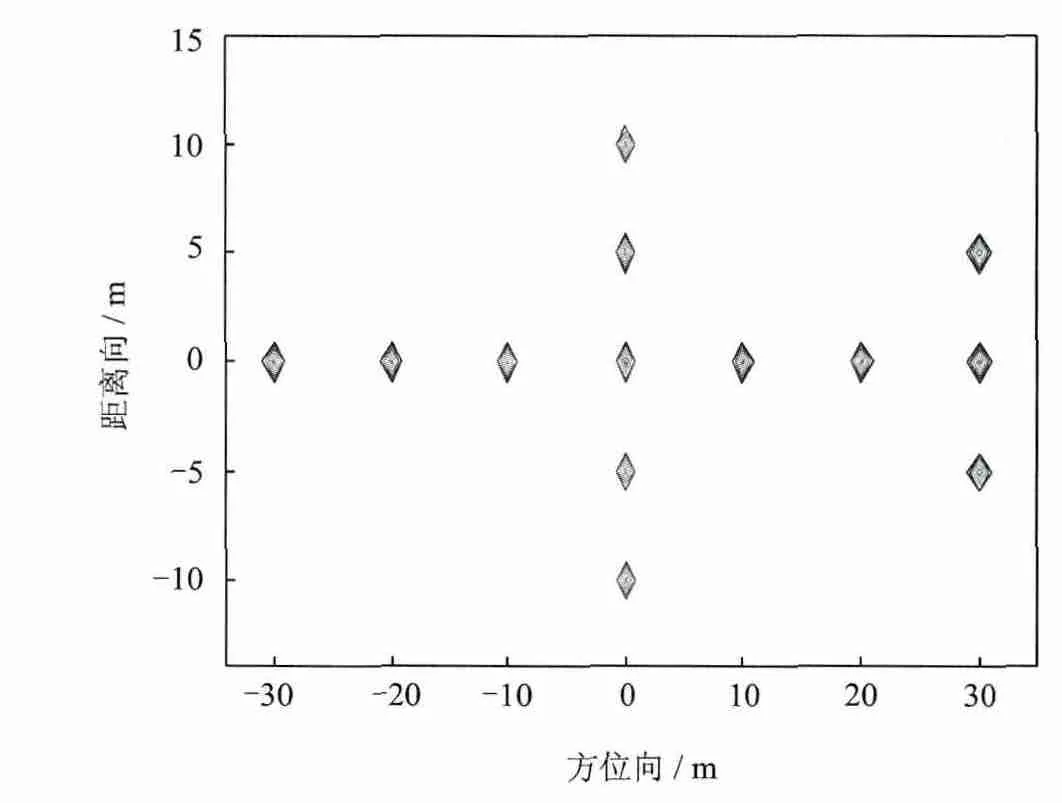
图5 目标散射点模型Fig.5 Target scatters model
4.1 加速旋转目标的MTRC校正仿真
仿真时,目标位于雷达基线的中垂线上距雷达基线的垂直高度10km,目标绕质心匀加速旋转,仿真具体参数如表1所示。
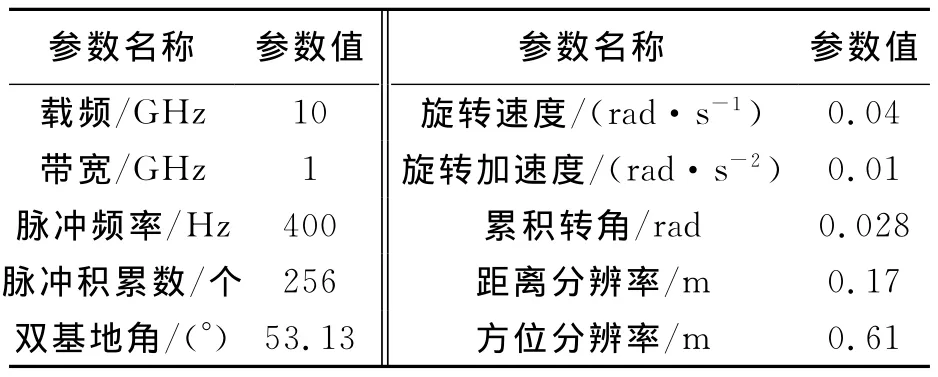
表1 双基地ISAR匀加速旋转目标仿真参数Table 1 Bistatic ISAR simulation parameters of uniformly accelerated rotation target
图6为MTRC校正前后的一维距离像结果,图6(a)未进行 MTRC校正,可以看出,随着脉冲个数的增加,距离像不再在同一个距离单元内,出现向两边距离单元扩散的现象,发生了MTRC。图6(b)为MTRC校正后的一维距离像,包络没有随着慢时间的改变而出现走动现象。图7是基于RD成像算法,对匀加速旋转目标的二维成像结果。其中,图7(a)未经过 MTRC校正,图像在方位向上出现散焦现象,并且距离质心越远,散焦越严重,有些散射点已无法辨别。图7(b)为采用本文方法,对回波数据MTRC校正后的双基地ISAR二维像,对比容易发现,该ISAR二维像较图(a)明显聚焦。通过计算,MTRC校正前后,两幅ISAR像的图像对比度分别为16.336 3,21.304 7,数字对比从量上也说明了MTRC校正的效果。
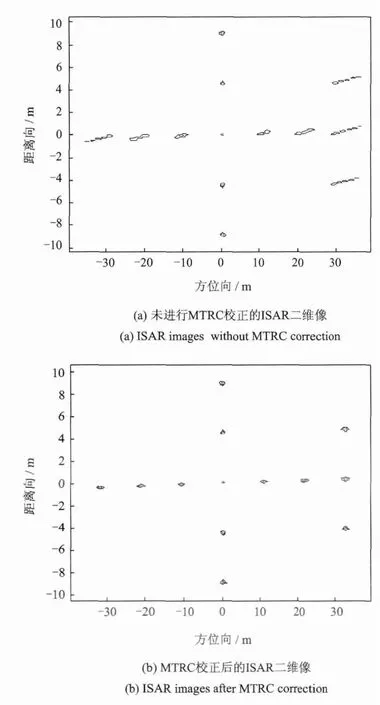
图7 加速旋转目标MTRC校正前后ISAR二维像Fig.7 ISAR images before and after MTRC correction of accelerated rotation target
4.2 加速直线运动目标的MTRC校正仿真
仿真时,设定目标在雷达基线中垂线沿基线方向做匀加速直线运动,仿真参数如表2所示。
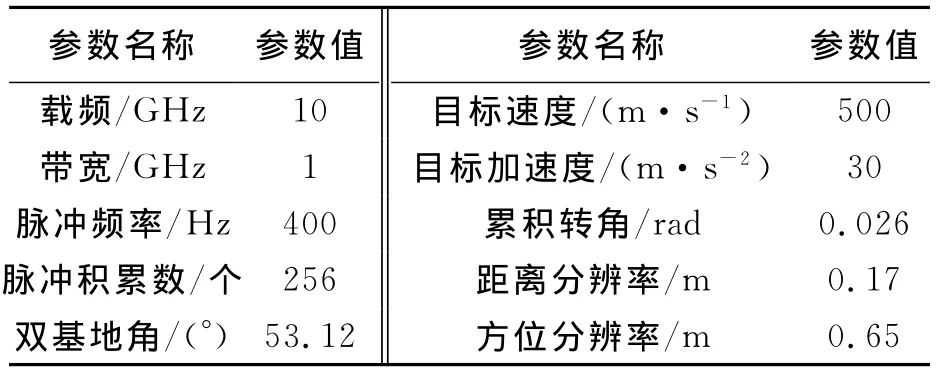
表2 双基地ISAR匀加速直线运动目标仿真参数Table 2 Bistatic ISAR simulation parameters of uniformly accelerated linear motion target
成像过程中,可根据收发双站雷达与目标中心的距离,求出目标的等效旋转角速度、旋转角加速度,如图8所示。可以看出,旋转角速度接近匀速变化,角加速度虽有变化,但范围很小,因此,可把双基地ISAR匀加速运动目标经运动补偿后的模型等效为匀加速转台模型。
仿真成像结果如图所9示,可明显看出,本文的校正方法有效消除了散射点的MTRC问题,MTRC校正前后,两幅ISAR像的图像对比度分别为17.3063,19.4570,经过校正,图像质量得到很大的提高。

图8 成像过程中目标等效转动角速度和角加速度Fig.8 Target equivalent rotation angular velocity and angular acceleration during imaging

图9 加速直线运动目标MTRC校正前后ISAR二维像Fig.9 ISAR images before and after MTRC correction of uniformly accelerated linear motion target
两次仿真实验,累积转角基本相同,但匀加速直线运动目标的成像效果没有理想转台模型的好,主要原因在于,匀加速直线运动经过平动补偿及相位校正才转化为转台模型,运动补偿精度与选择的补偿算法关系密切,正常情况下,不可能达到完全补偿的理想效果。此外,由图8可知,运动补偿后的模型是近似等效为理想的匀加速转台模型,该近似过程对成像效果也会有小的影响。
5 结束语
本文针对双基地ISAR机动目标的MTRC问题,基于转台模型,对解线频调后的目标回波信号进行深入研究,分析了 MTRC产生机理,并将MFT应用于MTRC的校正中,有效消除了快时间频率与慢时间的耦合,解决了MTRC问题。最后分别对匀加速旋转目标和直线运动的机动目标进行仿真实验,结果表明,基于MFT的MTRC校正方法能有效解决机动目标的距离徙动问题,提高双基地ISAR二维像的图像质量。
[1]杨振起,张永顺,骆永军.双(多)基地雷达系统[M].北京:国防工业出版社,1998:14-15.Yang Zhenqi,Zhang Yongshun,Luo Yongjun.Bistatic(multistatic)radar system[M].Beijing:Defense Industry Press,1998:14-15.
[2]Zhu Daiyin,Zhang Wei,Zhu Zhaoda.Phase autofocusing algorithm for compressed inverse synthetic aperture radar imaging[J].Transactions of Nanjing U-niversity of Aeronautics & Astronautics,2012,29(3):245-253.
[3]朱仁飞,罗迎,张群,等.双基地ISAR成像分析[J].现代雷达,2011,33(8):34-38.Zhu Renfei,Luo Ying,Zhang Qun,et al.Analysis of bistatic inverse synthetic aperture radar imaging[J].Modern Radar,2011,33(8):34-38.
[4]Jiang Zhenglin,Xing Mengdao,Bao Zheng.Correction of migration through resolution cell in ISAR imaging[C]//2001CIE International Conference on Radar Proceedings.Beijing:IEEE,2001:933-937.
[5]Xing Mengdao,Wu R,Bao Zheng.High resolution imaging of high speed moving targets[J].IEE Proceedings-Radar,Sonar and Navigation,2005,152(2):58-67.
[6]朱仁飞,朱小鹏,张群.基于调频连续波信号的双基地ISAR成像研究[J].宇航学报,2012,33(2):222-227.Zhu Renfei,Zhu Xiaopeng,Zhang Qun.Imaging study on bi-static ISAR based on frequency modulation continuous wave[J].Journal of Astronautics,2012,(2):222-227.
[7]韩兴斌,胡卫东,郁文贤.ISAR越距离单元走动校正的近似极坐标算法[J].系统工程与电子技术,2007,29(3):346-349.Han Xingbin,Hu Weidong,Yu Wenxian.Approximately polar formatting algorithm to compensate migration through resolution cells in ISAR imaging[J].Systems Engineering and Electronics,2007,29(3):346-349.
[8]保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2010:177-181.Bao Zheng,Xing Mengdao,Wang Tong.Radar imaging technology[M].Beijing:Publishing House of Electronics Industry,2010:177-181.
[9]Wang Baoping,Gao Junjie,Sun Chao,et al.An MTRC compensated algorithm based on keystone transform and weighted orientation[C]//International Conference on Consumer Electronics,Communications and Networks.Xianning,China:IEEE,2011:85-89.
[10]Jiang Zhenglin,Xing Mengdao,Bao Zheng.Correction of migration through resolution cell in ISAR imaging[J].Chinese Journal of Electronics,2004,13(2):210-213.
[11]董健,尚朝轩,高梅国,等.间接同步连续采样模式双基地ISAR时间同步仿真[J].数据采集与处理,2011,26(3):347-355.Dong Jian,Shang Chaoxuan,Gao Meiguo,et al.Modeling and simulation on time synchronization of indirect synchronization continuous sampling mode bistatic ISAR[J].Journal of Data Acquisition and Processing,2011,26(3):347-355.
[12]朱小鹏,张群,朱仁飞,等.双站ISAR越距离单元徙动分析与校正算法[J].系统工程与电子技术,2010,32(9):1828-1832.Zhu Xiaopeng,Zhang Qun,Zhu Renfei,et al.Study on correction algorithm of migration through resolution cell in bistatic-ISAR[J].Systems Engineering and Electronics,2010,32(9):1828-1832.
[13]韩宁,尚朝轩,何强,等.双基地ISAR越距离单元徙动分析与校正方法[J].火力与指挥控制,2013,38(3):49-52,57.Han Ning,Shang Chaoxuan,He Qiang,et al.Study on correction method of bistatic ISAR migration through resolution cell for space target[J].Fire Control &Command Control,2013,38(3):49-52,57.
[14]Zhu Xiaopeng,Zhang Qun,Zhu Renfei,et al.A MTRC correction algorithm in bistatic ISAR[C]//2nd Asian-Pacific Conference on Synthetic Aperture Radar.Xi′an,China:IEEE,2009:977-980.
[15]王盛利,李士国,倪晋麟,等.一种新的变换——匹配傅里叶变换[J].电子学报,2001,29(3):403-405.Wang Shengli,Li Shiguo,Ni Jinlin,et al.A new transform — Match Fourier transform[J].ACTA Electronica Sinica,2001,29(3):403-405.
[16]Chen Jianjun,Chen Juan,Wang Shengli.Detection of ultre-high speed moving target based on matched Fourier transform[C]//2006CIE International Conference on Radar.Shanghai:IEEE,2006:1240-1244.
猜你喜欢
国学(2020年1期)2020-06-29
电子制作(2019年15期)2019-08-27
数学物理学报(2019年2期)2019-05-10
小学生学习指导(低年级)(2018年12期)2018-12-29
测控技术(2018年7期)2018-12-09
数学物理学报(2017年6期)2018-01-22
摄影之友(影像视觉)(2017年1期)2017-07-18
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07