
反激变换器带预估计补偿的非线性控制技术
2014-11-25 09:25孙亚萍朱善安任震宇王玉槐
电工技术学报 2014年6期
孙亚萍 朱善安 任震宇 王玉槐
(1.浙江大学电气工程学院 杭州 310027 2.杭州师范大学钱江学院理工分院 杭州 310018)
1 引言
反激变换器无需输出滤波电感和续流二极管,具有电路结构简单、输入输出电气隔离、电压调节范围宽和易于实现多路输出等优点,在中小功率领域得到广泛应用[1]。
在反激变换器的数字控制技术中,闭环控制一般采用数字PID 控制,这种控制主要是利用输出电压的实际值与期望值之间的误差作为控制的输入量,来调节输出电压,需要电源系统具有足够的相位裕度、幅值裕度以及环路带宽来保证系统的动态性能和稳态性能。但是Flyback 电路由于其传递函数右半平面具有零点,使得控制系统环路带宽受限,系统对误差信号的响应比较慢,导致电路的动态性能比较差[2]。特别是系统在输入电压Uin快速变化,并且没有前馈控制的情况下,常用的数字PID 控制很难快速响应,致使输出电压出现较大的超调量,从而会触发过电压保护,导致模块关断,甚至损坏后面的贵重电子元件。
而目前,无论是客户,还是行业的标准都对电源模块的性能提出了更高的要求,需要电源系统能够在非常恶劣的环境下都正常工作,例如雷击导致的输入电压突变,或者Surge 测试中的浪涌电压引起模块输入电压的快速变化。这样就迫使电源控制系统采用新的处理方式来提高系统的响应速度和可靠性。
本文在传统PID 闭环控制的基础上,增加了对输入电压Uin的非线性控制,从而保证输出电压Uout不会因为输入电压Uin突变而出现大的过冲。
2 带预估计补偿的非线性控制技术
2.1 非线性控制算法分析
常用的PID 调节控制器是一种线性控制器,它是利用系统实际输出量y(t)与给定量r(t)之间的误差时间函数e(t)=r(t)-y(t)进行比例、积分和微分组合运算的线性调节,形成控制量u(t)输出,即

Flayback 变换器的主电路如图1 所示。

图1 Flyback 主电路图Fig.1 Flyback circuit diagram
电流连续时Flyback 变换器开关Q 的控制信号PWM 占空比与输入电压的关系式为

式(2)中的输出电压Uout和变压器匝比N都可以看作是常数,所以PWM 占空比D只与Uin有关,根据Uin的值就可以算出D。
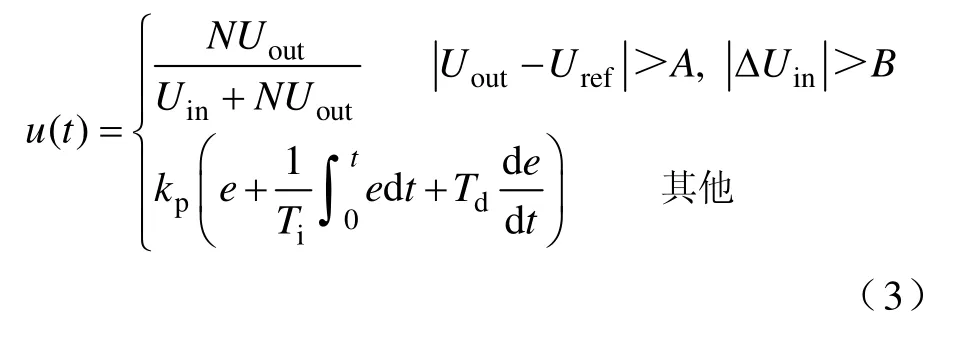
带预估计补偿的非线性控制技术是在传统PID闭环控制的基础上,增加了对输入电压Uin的非线性控制:当控制器采集到的输入电压的变化量︱ΔUin︱和输出电压的误差值︱Uout-Uref︱都超过其门限值时,系统将不再用PID 调节控制,而是直接利用输入电压值Uin和输出电压值Uout计算出所需要的PWM 占空比D作为控制量输出;而在正常情况下,系统则采用PID 调节控制。故结合式(1)和式(2)可以得出整个系统就是一个非线性控制器,关系见式(3)。
2.2 曲线拟合技术分析
从上面的式(2)可以得到,如果利用输入电压Uin计算PWM 占空比D需要运用到除法计算,但大多数先进的微控制器只包含硬件乘法器,却没有专用的除法器。例如目前广泛应用的DSP 芯片内核中,通常都有可单周期完成的片内硬件乘法器,以实现某些复杂算法如滤波以及实时处理等。本文为了提高计算速度,充分利用DSP 的乘法器去实现除法运算,采用了曲线拟合技术,将式(2)转化成下面只有乘法和加减法的等式,见式(4),然后再利用DSP 快速地计算出相应的PWM 占空比D。

本文设计反激电路变压器的匝比N=3:2,输出电压为12.5V,由式(2)可以得到下面等式:

在浪涌实验中,使反激电路的输入电压Uin在150μs 时间内,从19V 上升到80V,根据式(5)得到如图2 中实线所示的占空比D1与输入电压Uin之间的关系曲线。将该曲线利用CurveExpert 软件算出式(5)所对应的只有乘法和加减法的等式,见式(6)。

根据式(6)得到如图2 中虚线所示的占空比D2与输入电压Uin之间的关系曲线,从图2 中可以看出,两条曲线基本重合,即利用式(6)代替式(5)是成立的。

图2 占空比与输入电压关系曲线拟合图Fig.2 Curve fitting diagram between duty and input voltage
2.3 输入电压预估计补偿算法分析
数字闭环控制是一种基于离散化的控制,不能实现完全的实时控制,总有一定的延迟时间,例如DSP 的ADC 采样与转换时间,PWM 占空比的计算等都会造成系统计算的延时,由于DSP 性能越来越高,这些延迟时间在正常情况下对系统性能没有太大的影响。但在输入电压Uin快速变化的情况下,DSP 系统控制的延时就不能忽略了。
本文提出对输入电压Uin进行预估计的方式,利用当前 ADC 所采到的输入电压的值加上此次Uin(k) 的值与上一次Uin(k-1) 值的差作为计算的输入量Uin=2Uin(k)-Uin(k-1),利用ΔUin=Uin(k)-Uin(k-1)作为计算的补偿量,去修正由于DSP 系统的延迟时间造成的计算误差,从而快速改变PWM占空比来增加系统响应速度,其工作流程如图 3所示。
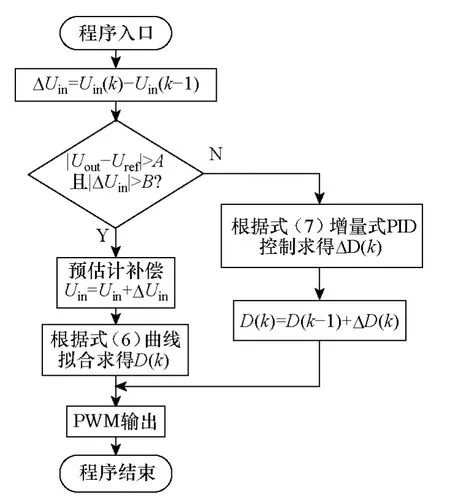
图3 主程序流程Fig.3 Program flow chart
数字电源离散化控制中,PWM 占空比采用增量式PID 控制,见式(7)。

为了提高系统两个状态下切换的稳定性与连续性,每次曲线拟合求得的占空比D(k)将作为PID 调节控制占空比的前一状态值D(k-1)。
3 电路与参数设计
为了验证上述控制方案的有效性,本文利用TI公司的TMS320F28020DSP 设计了带预估计补偿的非线性控制的Flyback 样机,图4 给出了带预估计补偿的非线性控制电路的系统结构和实验配置。
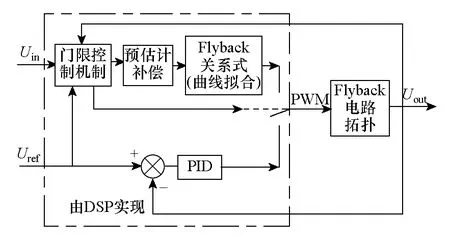
图4 带预估计补偿的非线性控制结构框图Fig.4 Non-linear control block with prediction compensator
实验中Flyback 电路的具体参数如下:变压器的匝比N=3:2;输出电压为 12.5V,滤波电容C=4×10μF/16V;负载电阻R=5Ω;电压检测采用电阻分压;主开关器件Q 型号为FDMS86200;快恢复二极管为V10P10。控制器的参数选取如下:电压采样频率fs=100kHz;系统的PWM 开关频率fswitch=300kHz。
4 实验结果
图5 和图6 分别为反激电路在空载情况下(空载为最恶劣负载条件,此时电压过冲最大),输入电压Uin在150μs 时间内从19V 上升到80V 时,采用传统PID 控制和带预估计补偿非线性控制的输出电压响应波形图,其中,CH1 通道测量Uin信号,CH2通道测量Uout信号。从图中可以看出,在同样的Uin输入条件下,采用传统的PID 控制,考虑到输入电压变化范围过宽(19~80V),因为需要满足整个输入电压范围内的性能,从而PID 的优化空间受到限制,同时输入电压的变化时间过短(150μs),PID存在积分惯性作用很难在几个开关周期内做出调整,因此必然会导致输出电压发生过冲的情况,而用非线性控制就可以大大的抑制输出电压的过冲,保证输出电压稳定。
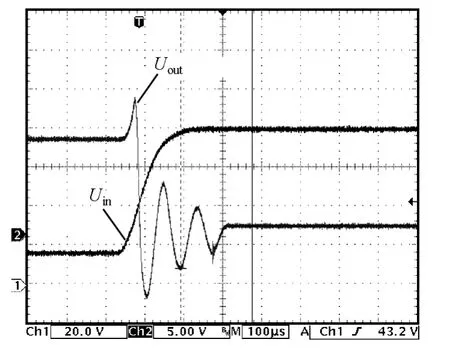
图5 传统PID 控制时的响应波形图Fig.5 Response waveform with traditional PID regulation

图6 带预估计补偿非线性控制响应波形图Fig.6 Response waveform with non-linear control
对比图5 和图6 可以发现,采用带预估计补偿的非线性控制可以提高系统的动态响应速度,从而保证输出电压不会因为输入电压突变而出现较大的过冲。
5 结论
本文提出了一种新颖的Flyback 电路带预估计补偿的非线性控制方法,通过对输入电压的控制,提高了系统的响应速度,从而保证输出电压不会因为输入电压突变而出现较大的过冲。该控制技术具有如下特点:
(1)在传统的PID 控制调节基础上,增加了对输入电压的调节,即当输入电压的变化和输出电压都超过其门限值时,系统将不再用PID 控制进行调节,而是直接利用输入电压的值计算出所需要的PWM 占空比。
(2)算法处理过程中引入曲线拟合技术,用DSP 的乘法器去实现复杂的除法运算,进一步提高了系统的响应速度。
(3)为了消除由于DSP 系统的延时时间造成的计算误差,控制算法中设计了对输入电压预估补偿的计算方式。
尽管本文所提方案是针对 Fly-back 电路展开的,但考虑到一般性,对其他数字电源控制器也同样具有参考价值。
[1]阮新波,严仰光.直流开关电源的软开关技术[M].北京:科学出版社, 2000.
[2]刘锦波,明文龙.一种基于输入/输出反馈线性化的Boost 型DC/DC 变换器非线性控制方案[J].中国电机工程学报,2010,30(27):55-60.Liu Jinbo,Ming Wenlong.A novel scheme of nonlinear control strategy based on input-output linearization for Boost type DC/DC converter[J].Transactions of China Electrotechnical Society,2010,30(27):55-60.
[3]Wu K I H,Chen Y H.Applying modified one-comparator counter-based PWM control strategy to flyback converter[C].IEEE Proceedings of International Conference on Power Electronics and Drive Systems,2007:225-228.
[4]牟清波,许建平,秦明,等.脉冲序列控制反激变换器输出电压纹波和脉冲组合方式[J].电工技术学报,2010,25(9):101-107.Mu Qingbo,Xu Jianping,Qin Ming,et al.The output voltage ripple and control pulse combination of pulse train controlled Flyback converter[J].Transactions of China Electrotechnical Society.2010,25(9):101-107.
[5] Liu Y F,Ge L S.Advanced control for steady state and dynamic performance of DC-DC converters[J].Transactions of China Electrotechnical Society,2008,23(10):75-82.
[6]Yuan Y C,Lv Y D,Tong Gang.Study on hybrid controller and PWM driver of peek current controlled flyback converter[C].Proceeding of the 30th Chinese Control Conference,2011:4480-4485.
[7]张晓峰,吕征宇.混合动力车用全数字电流控制型双向DC/DC 变换器[J].电工技术学报,2009,24(8):84-89.Zhang Xiaofeng,Lü Zhengyu.Digital -currentcontrolled bi-directional DC/DC converter in the hybrid electric vehicle[J].Transactions of China Electrotechnical Society,2009,24(8):84-89.
[8]Tajuddin M F N,Rahim N A,Daut I.Design and implementation of a DSP based digital controller for a DC-DC converter[C].Second International Conference on Computer and Electrical Engineering,2009:209-213.
[9]Yuan Y C,Liu J,Lü Y D.Digitally controlled flyback converter with online adaptive tuning and estimation[C].International Conference on Internet Computing and Information Services,2011:449-452.
[10]王勤,张杰,阮新波,等.一种新型双输入反激DC/DC 变换器[J].电工技术学报,2011,26(2):115-122.Wang Qin,Zhang Jie,Ruan Xinbo,et al.A new double-input flyback DC/DC converter[J].Transactions of China Electrotechnical Society,2011,26(2):115-122.
[11]王凤岩,任黎立,许建平.基于 F2812 的逆变器数字控制器的建模与设计[J].电工技术学报,2009,24(2):94-99.Wang Fengyan,Ren Lili,Xu Jianping.Modeling and design of digital controller for inverter based on F2812[J].Transactions of China Electrotechnical Society,2009,24(2):94-99.
猜你喜欢
电子设计工程(2022年15期)2022-08-17
气象学报(2021年2期)2021-05-13
现代计算机(2020年31期)2020-12-28
光通信研究(2020年2期)2020-06-15
数学大世界(2020年2期)2020-03-07
山东冶金(2019年5期)2019-11-16
科技创新与应用(2019年17期)2019-06-09
价值工程(2017年31期)2018-01-17
人生十六七(2016年14期)2016-12-01
现代农业(2015年1期)2015-02-28
