
光纤陀螺惯导系统航位推算误差补偿方法研究
2014-12-01 02:37李颖娟邓春林
应用光学 2014年4期
陈 颖,纪 明,康 臻,杨 萌,李颖娟,刘 冰,邓春林
(1.西安应用光学研究所,陕西 西安710065;2.第二炮兵工程学院,陕西 西安710025)
引言
用光纤陀螺作为核心器件构成的惯导系统能够为车辆、飞机、舰艇提供重要的航向、速度及位置信息。惯导系统在具备自主性、完全独立特点的同时,由于自身误差会随时间增长而积累,因此需要辅助其他导航方式提高系统精度。航位推算与惯导系统类似,也具有自主性,它利用里程计的输出、惯导提供的姿态信息和惯导相对车体的安装偏角进行位置解算[1]。
本文提出了用光纤陀螺组成惯导系统,结合里程计的路程信息进行航位推算,减小了系统误差的发散程度。通过组合导航滤波器对各种误差进行实时估计,利用估计结果对航位推算进行补偿修正,最后对整个系统进行跑车标定及试验数据分析[2-3]。
1 组合导航系统组成
惯性导航系统INS(intertial navigation system)采用光纤陀螺组成惯性测量单元IMU(intertial measurement unit),每5ms进行导航解算一次。INS与里程计组合导航方案如图1所示。事先标定的INS经过导航解算处理后输出姿态信息,航位推算模块使用INS提供的姿态信息、航向信息和里程计的位置增量信息[4]ΔSk,然后进行多次标定得到安装偏角,最终完成航位推算。为减小误差,设计了卡尔曼滤波器。以组合导航系统的误差值做为状态量,根据航位推算得出的速度矢量信息与INS捷联导航算法得出的速度矢量信息差值,作为Δ卡尔曼滤波器量测输入量,估计出加速度计偏置 ,陀螺漂移ε,平台姿态误差φ,速度误差δV,里程计刻度系数误差δKd。用上述误差估计值修正补偿惯导系统中相应状态的误差量。从而形成反馈闭环矫正,提高系统的导航定位精度[5]。
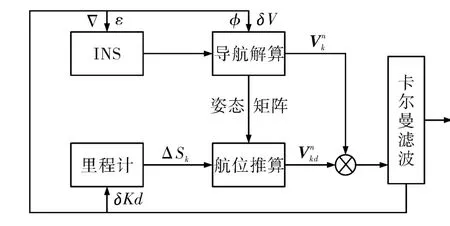
图1 系统组合导航设计方案Fig.1 Block diagram of integrated navigation system
2 航位推算及误差分析
2.1 主要坐标系定义
航位推算方法是该系统的特点,在设计前需要定义以下几个坐标系[6]:
1)导航坐标系n:选取东北天地理坐标系;
2)车体坐标系m:里程计的测量坐标系,车体纵轴线为y轴,垂直车体y为x轴,由车顶部贯穿车身为z轴;
3)INS坐标系b:惯性测量单元的测量坐标系,INS向右为x轴,向前为y轴,向上为z轴。
2.2 航位推算原理
假设里程计在[tk-1,tk]时间段内,测量车体的路程增量为ΔSmk,里程计测得的路程增量ΔSk可表示为

假设m系和b系之间有安装偏角,分别是航向安装偏角αφ,俯仰安装偏角αθ及横滚安装偏角αγ。可得b系到m系的变换矩阵:

则(2)式可变为
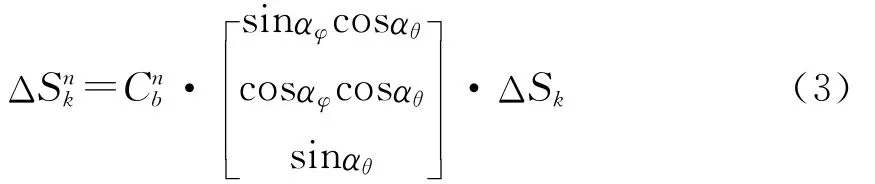
由此可见横滚安装偏角αγ不影响航位推算的结果。
航位推算位置更新与捷联惯导系统位置更新算法相似,因此得到系统位置更新算法为


式中:Ldk、λdk和hdk分别表示tk时刻的纬度、经度和高度;Ld(k-1)、λd(k-1)和hd(k-1)分别表示tk-1时刻的纬度、经度和高度;ΔSnE(k)、ΔSnN(k)和 ΔSnU(k)分别表示里程计在[tk-1,tk]时间段内测量东向路程增量、北向路程增量和天向路程增量;RMd(k-1)和RNd(k-1)表示tk-1时刻地球子午圈的曲率半径和卯酉圈曲率半径。
2.3 航位推算误差分析
实际行驶路程:

式中:φk为小角度量,表示系统在tk时刻姿态误差角,主要由初始对准误差和陀螺漂移产生;ξ也是小角度量,表示m车体系和b惯导系之间的安装误差角;δKd也是小量,表示里程计的标度因数误差。
将(3)式代入(4)式得出:

式中:δαφ表示m 系与b系之间的航向安装误差角;δαθ表示俯仰安装误差角。展开上式,并忽略αk、δαφ、δαθ和δKd的高阶小量,得到:

式中:


若将航位推算的位置误差方程表示成地理坐标的形式,可以得到以下公式
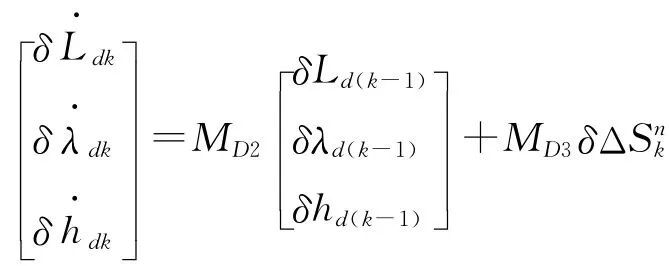
式中:

3 组合滤波设计
由航位推算的误差分析可知,系统的误差源主要来自于惯导的姿态矩阵、惯导与车体的安装误差矩阵、里程计的刻度系数误差。因此设计卡尔曼滤波方程来估计主要误差量,以补偿修正系统中存在的误差。
3.1 系统状态方程设计
定义系统的状态变量为
X=[δVnφnδpnεbΔbδKd]T
式中:δVn=[δVEδVNδVU]T表示速度误差;φn=[φEφNφU]T表示姿态误差;δpn=[δL δλ δh]T表示位置误差;εb=[εxεyεz]T表示陀螺漂移;b=[xyz]T表示加速度计偏置;δKd表示里程计刻度系数误差。因此建立状态方程

状态转移矩阵根据系统误差方程确定。w是系统激励噪声,上式可得到系统噪声的方差强度q。
3.2 系统量测方程设计
系统的量测方程选取捷联导航算法的速度矢量与航位推算的速度矢量差值作为卡尔曼滤波器的输入量。如果考虑惯导的姿态误差和里程计的刻度系数误差:

式中:φ是平台姿态误差,v是量测噪声,得到量测噪声阵R;φ根据已建立的状态变量,可确定量测阵为

滤波方程确定后,方程进行离散化处理,选定状态估计初值X0和均方误差初值P0分别进行滤波回路与增益回路的时间更新和量测更新[7-9]。设计卡尔曼滤波器,利用递推的算法,随着滤波次数的增加,提取的被估计误差值的信息浓度逐渐增加,不断接近真实的误差值,进一步提高了系统误差补偿的精度。
4 跑车试验分析
系统选用的光纤陀螺零偏稳定性为0.06°/h,随机游走系数 0.005°标度因数非线性度50×10-6,加速度计零偏2×10-5g,输入量程±25g,加速度计标度因数误差20×10-6。
在西安市长安区经过多次跑车试验,首先标定惯导在车上的安装偏角,确定航向安装偏角-1.379 325°,俯仰安装偏角0.401 56°。然后进行安装偏角补偿验证试验。图2是跑车验证试验中位置误差及里程计刻度系数误差的估计曲线,图中在250s之后,由于系统进入频繁的加速与减速状态,导致位置误差较大。

图2 位置误差及刻度系数误差估计曲线Fig.2 Estimated curves of position error and scale factor error
系统在长安区学府大道附近进行非闭合路线的跑车试验,图3是学府大道与外国语大学新区东侧跑车试验的轨迹曲线。

图3 跑车试验轨迹曲线Fig.3 Navigation trail of vehicular experiment
图3 中以O为起点,途经A点最后到达B点。A与B两点的真实坐标用GPS测量得到,系统分别用纯惯性导航解算(INS)和惯导/里程计组合导航解算(INS/OD)两种导航定位方法计算得到A、B两点的位置信息,用2种方法得到A点的定位误差CEP(circular error probability)分别是3.49‰和2.3‰,B点的定位误差分别是2.4‰和2‰。形成的试验数据表格如表1所示。

表1 系统跑车实验定位精度数据Table 1 Statistics of position experiment
5 结论
由光纤陀螺组成的惯导系统与里程计组合滤波后的跑车试验可以看出,借助里程计进行航位推算,能够提高系统的定位定向精度。由于航位推算原理中主要利用里程计增量和车体姿态矩阵进行计算,里程计的测量误差不会随系统工作时间增大而增大,这将会减小系统定位误差的发散程度。并且航位推算算法中只需要陀螺与里程计的测量信息,不用加速度计的测量信息,因此减少了误差源,计算量也相应减少。
通过组合滤波器的设计,能够准确估计出系统的主要误差源,包括定位误差、姿态误差、惯性传感器自身的误差量。能够有效估计以上误差值,且估计值稳定,误差小。充分估计的里程计刻度系数误差值,也对系统起到一定的修正作用,因此实现了系统的高精度定位定向[10]。该方法不仅适用于陆用载体,同样可在装有计程仪的海面舰艇船只上应用,具有重要工程参考价值。
[1] Qin Yongyuan,Zhang Hongyue, Wang Shuhua.Theory of Kalman filter and integrated navigation[M].Xi'an:Northwestern Polytechnical University Press,1998.秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998.
[2] Li Tao,Wu Meiping,Jiang Ming,et al.A laser Gyro-SINS/GPS integrated navigation system for field-test[J].Journal of National University of Defense Technology,2003,25(3):104-108.李涛,吴美平,江明,等.激光陀螺SINS/GPS组合导航车载试验系统[J].国防科技大学学报,2003,25(3):104-108.
[3] Lan Chunyun,Miu Lingjuan,Shen Jun.Online-identification of odometers scale factor in land-used strapdown inertial navigation system[J].Journal of Beijing Institute of Technology,2003,23(2):198-201.兰春云,缪玲娟,沈军.陆用捷联惯导系统中里程计刻度因子的在线辨识[J].北京理工大学学报,2003,23(2):198-201.
[4] Yan Gongmin,Qin Yongyuan,Ma Jianping.Research on INS/OD integrated navigation system algorithm[J].Computer Measurement &Control,2006,14(8):1085-1087.严宫敏,秦永元,马健萍.惯导/里程计组合导航系统算法研究[J].计算机测量与控制,2006,14(8):1085-1087.
[5] Fu Xin,Ma Chongze,Chen Linfeng,et al.Implementation and parameter optimization for path length control of ring laser gyro based on DSP[J].Journal of Applied Optics,2012,33(5):841-845.傅鑫,马冲泽,陈林峰,等.基于DSP的激光陀螺稳频回路设计及其参数整定[J].应用光学,2012,33(5):841-845.
[6] Zhao Changshan,Qin Yongyuan,Xia Jiahe.On SINS installation error calibration of a multimode vehicular navigation system[J].Computer Measurement & Control,2008,16(10):1393-1395.赵长山,秦永元,夏家和.车载惯导里程仪组合导航系统安装误差标定研究[J].计算机测量与控制,2008,16(10):1393-1395.
[7] Jia Jianfang,Guo Shengquan.A study of a simple SINS/GPS integrated navigation system for military vehicle[J].Microcomputer Information,2002,18(7):23-27.贾建芳,郭圣权.军用车载简易捷联惯导/GPS组合导航系统的研究[J].微计算机信息,2002,18(7):23-27.
[8] Ma Haibo,Li Shaojie,Huang Yuefeng,et al.Accurate location algorithms in vehicle navigation system[J].Geomatics World,2010,16(2):48-55.马海波,李少杰,黄跃峰,等.车载导航系统的高精度定位算法[J].地理信息世界,2010,16(2):48-55.
[9] Liu Yong,Zhao Hongqing,Kou Lie,et al.A study on SINS/GPS/OD combined navigation system[J].Journal of Projectiles;Rockets;Missiles and Guidance,2006,26(2):47-48.刘勇,赵红庆,寇烈,等.捷联惯导系统/GPS/里程仪组合导航的研究[J].弹箭与制导学报,2006,26(2):47-48.
[10] Miu Lingjuan,Li Chunming,Guo Zhenxi,et al.Independently integrated navigation system of SINS and distance-transfer-unit for land vehicles[J].Journal of Beijing Institute of Technology,2004,24(9):808-811.缪玲娟,李春明,郭振西,等.陆用捷联惯导系统/里程计自主式组合导航技术[J].北京理工大学学报,2004,24(9):808-811.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
舰船科学技术(2022年10期)2022-06-17
民用飞机设计与研究(2020年4期)2021-01-21
数字通信世界(2019年12期)2020-01-14
新课程·中学(2019年7期)2019-09-17
中国惯性技术学报(2019年1期)2019-05-21
北京航空航天大学学报(2018年1期)2018-04-20
物理教学探讨(2018年1期)2018-02-13
中国惯性技术学报(2017年1期)2017-06-09
导航定位与授时(2016年6期)2016-03-16
