
基于SIFT算法的二维图像匹配研究
2014-12-19 06:22王慧敏
河南科技 2014年20期
王慧敏
(延边大学工学院,吉林 延边朝鲜族自治州 133002)
随着科学的发展, 图像匹配在越来越多的领域中得到应用,其在图像处理中起到重要作用。
图像匹配的方法大致上可以分为针对区域和针对特征两种类型。 基于区域的匹配算法是对包含在该区域的所有像素进行匹配,计算量较大,而且对原始图像样本的旋转角度、光照条件有着较高的要求[1]。 基于特征的匹配算法是对原始图像样本进行特征点提取,寻找不同图片之间相同的特征点,工作量较小。 常见的算法有SIFT、SURF、Harris 等,其中SIFT 算法相对于其他算法在图像尺度、视角变化、光照等方面的变化有较好的鲁棒性[2]。
1 SIFT 算法
SIFT 算法是David Lowe 在1999年发表,于2004年总结并提出的一种基于尺度空间的图像缩放、 旋转方向变换保持不变性的特征匹配算法。其核心思路是首先构建尺度空间,检测极值点,获得尺度不变性。 其次对特征点过滤并进行精确定位,剔除不稳定的特征点,并且在特征点处提取特征描述符,为特征点分配方向值,并生成特征描述子,利用特征描述符寻找匹配点[3][4]。具体操作步骤如下:
(1)尺度空间极值检测
在不同尺度参数σ 变化时,高斯函数G(x,y,σ)和输入图像I(x,y)卷积可以得到输入图像的尺度空间L(x,y,σ):

其中σ 是尺度因子,该值越大图像被平滑得越大;该值越小图像被平滑得越小。
SIFT 算法检测尺度空间主要采用DoG 算子, 其中DoG 算子定义为两个不同尺度的高斯核的差分。

(2)特征点的方向分配
利用关键点邻域像素的梯度方向分布特征为每个关键点指定方向参数,使算子具备旋转不变性。

上式为(x,y)处梯度的模值和方向公式,其中L 所用的尺度为每个关键点各自所在的尺度。
(3)SIFT 特征向量
首先把坐标轴旋转为关键点的方向, 以确保旋转不变性。实际计算过程中对每个关键点使用16 个种子点来描述,这样对每一个关键点产生128 维的SIFT 特征向量,从而提高匹配的稳定性。
(4)特征点匹配
生成SIFT 特征向量后,查找每一个特征点在另外一个图像中的最邻近点,也就是对两个样本进行特征向量相似度计算,理想情况下两个样本之间相同部分的特征点应具有相同的特征向量。 为了去掉因图像本身产生的没有匹配关系的特征点,比较最临近距离和次邻近距离。 当他们的比值小于设定的阈值时判定为错误匹配点,将错误的匹配点去掉。
2 实验结果及分析
为了验证SIFT 算法的特点本实验中采取了两组图片样本进行分析。
样本一为建筑风景图片。 我们对该图片进行了局部裁剪,然后进行等比放大,属于局部放大图像匹配,用来测试SIFT 算法对几何变形的图像的匹配能力。
样本二为书本图片。 我们对该原始样本进行了不同角度的拍摄,具有较大的倾斜角度,属于旋转图像匹配,用来测试SIFT算法对不同方位的图像的匹配能力。
为了达到匹配感官度的统一性,对一组样本中的前后两张图片均采用了相同的分辨率。 本算法用MATLAB(2010a)进行编程,样本图片的比例阈值我们设为0.47,结果如下图。

图1 第一组样本匹配结果
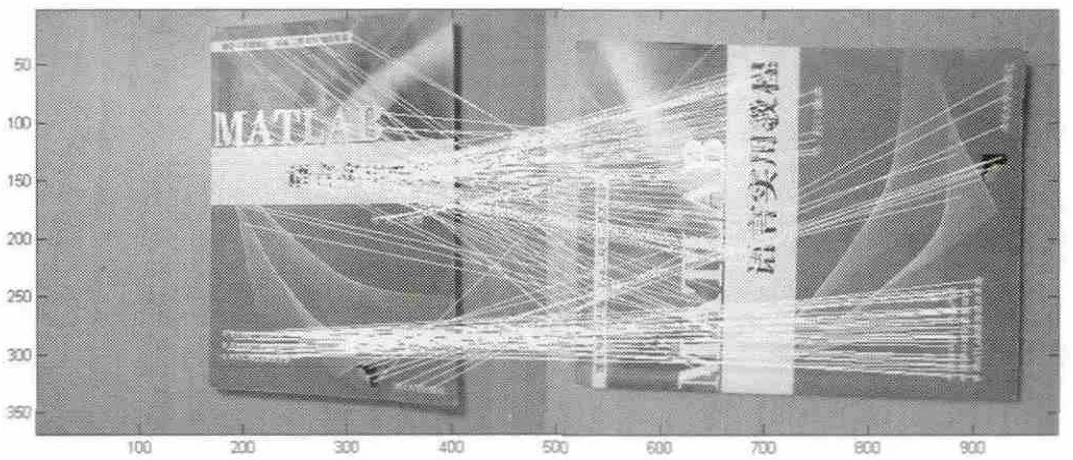
图2 第二组二组样本匹配结果
图1 是第一组样本的匹配结果,可以看出两张图像的SIFT特征的方向、尺度信息较为准确,与直观观感判断相吻合。 图2是第二组样本的匹配结果, 从图中可以看出两张图像中对应的SIFT 特征得到了很好的匹配,在较大旋转角度下SIFT 算法保持了良好的方向性。 对两组试验的具体数据进行统计,可得表1。

表1 匹配数据统计
由上表中可以看出SIFT 特征匹配算法可以对不同方位、具有一定倾斜角度的图像进行准确的匹配,体现出SIFT 算法的特点。 但是从第一组样本数据中可以看到, 随着图像复杂度增加,SIFT 算法需要对各个尺度进行复杂度较高的计算,因而计算用时会大幅度增加。
3 结语
本文利用SIFT 算法的特征实现了二维图像的匹配, 验证了SIFT 算法具有良好的尺度、旋转、光照等不变的特征,其识别速度较慢等缺点可以通过与其他图像匹配算法的结合来弥补,具有较好的研究价值。
[1]吴建波,赵新民,朱信忠,等.基于一种SIFT 优化算法的图像检索[J].微型电脑应用,2011,27(5):4-7.
[2]孔晓东,屈磊,桂国富,等.基于极约束和边缘点检测的图像密集匹配[J].计算机工程,2004(20):178-179.
[3]Lowe D.Distinctive Image Feature from Scale -Invariant Key-points [J].International Journal of Computer Vision,2004,60(2):90-110.
[4]Cordeliaschmind,Rogermohr. Loeal Gray value Invarianls ofr Image Relrieval [J]. Pallem Analysis and Maehine Intelligenee,IEEE Transaclions,1997,19(15):530-535.
猜你喜欢
中学生数理化·中考版(2022年12期)2022-02-16
今日农业(2021年8期)2021-11-28
矿产勘查(2020年8期)2020-12-25
测控技术(2018年10期)2018-11-25
魅力中国(2016年42期)2017-07-05
计算机测量与控制(2017年6期)2017-07-01
软件导刊(2015年8期)2015-09-18
湖南大学学报·自然科学版(2014年10期)2014-11-20
中国卫生(2014年2期)2014-11-12
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10
