
基于多普勒辅助的惯性/卫星深组合技术研究
2015-03-10 07:01葛文涛陈安升
导航定位与授时 2015年6期
薛 涛,王 康,葛文涛,李 伟,陈安升
(北京自动化控制设备研究所,北京100074)
基于多普勒辅助的惯性/卫星深组合技术研究
薛 涛,王 康,葛文涛,李 伟,陈安升
(北京自动化控制设备研究所,北京100074)
针对高动态、强干扰环境下高精度组合导航应用需求,基于卫星导航环路误差模型,仿真分析了不同精度等级惯性辅助对环路的影响,量化分析了多普勒辅助对环路性能的提升效果;给出了多普勒辅助环路实现方法,结合卫星导航环路处理流程,提出了多普勒速度辅助环路实现方案;基于高动态轨迹进行了仿真实验,结果表明,基于多普勒辅助的惯性/卫星深组合技术能够有效提升环路高动态跟踪能力,在惯性信息辅助下,能够实现在25g/s加加速度、50g加速度高动态环境下对卫星信号的稳定跟踪。
多普勒辅助;深组合;高动态;抗干扰
0 引言
基于位置/速度、伪距/伪距率的惯性/卫星松散组合、紧组合技术,已经在航空、航天、航海以及陆用导航领域得到了广泛应用。但这两种组合方式受制于卫星信号跟踪环路的基本原理,在高动态、强干扰环境下无法实现对卫星信号的快速捕获和稳定跟踪,不能满足未来复杂战场高强度对抗应用需求。惯性/卫星深组合技术打破了传统惯性/卫星组合导航的设计思路,将惯性信息引入卫星导航跟踪环路,实现高动态适应性和抗干扰能力的大幅提升,是满足武器装备应用需求的重要手段。与传统松组合、紧组合模式相比,深组合系统工作过程更加复杂,信息交互更加深入,不同层次的惯性/卫星组合示意图如图1所示。
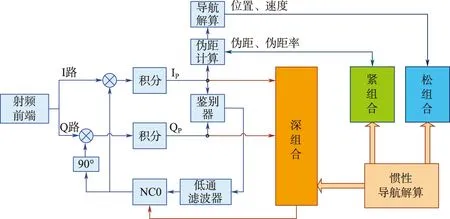
图1 不同层次的惯性/卫星组合示意图Fig.1 Different levels of inertial/satellite Integration
自20世纪90年代后期美国Draper实验室针对制导炮弹对GPS抗干扰能力的要求开展深组合技术研究以来,国内外众多研究机构对该技术开展了深入研究。目前,美国IGS公司和CRS公司、NAVSYS公司、斯坦福大学等多个研究机构已经开发出了相关产品,部分已实现工程应用。国内在深组合技术方面起步较晚,尚处于研究阶段。根据信息融合程度、辅助形式等的不同,深组合技术有多种实现方案,本文从惯性辅助下卫星导航环路误差模型入手,针对基于多普勒辅助的深组合技术性能开展深入分析与仿真验证,为相关技术研究与应用提供支撑。
1 惯性多普勒辅助深组合技术优势分析
1.1 卫星导航载波跟踪环路误差分析
载波跟踪环路性能是影响卫星导航高动态、抗干扰性能的关键。在不考虑电离层噪声等影响的前提下,载波跟踪环路的跟踪误差主要由载体动态导致的动态应力误差以及热噪声引入的误差组成
(1)
其中,σtPLL为热噪声,σv振动引入的相位噪声,θA为阿伦均方差,θe为动态应力误差。
热噪声大小影响主要取决于环路带宽与信号的载噪比[1],可以表示为
(2)
其中,Bn表示环路噪声带宽(Hz),C/N0表示载噪比(dB/Hz),T表示预检测积分时间(s)。
由振动引起的振荡器相位噪声表示为
(3)
其中,fL为L频段的输入频率,fm为随机振动的调制频率,sv(fm)为fm函数的振荡器振动灵敏度,P(fm)为fm函数的随机振动的功率曲率。
阿伦均方差一般为经验公式,对于三阶锁相环,表示为
(4)
其中,σA(τ)为振荡器短期稳定度的阿伦方差。
动态应力误差的影响误差主要取决于环路的带宽和阶数,对于三阶环路,动态应力误差可以表示为
(5)
不同信噪比下的无辅助三阶环路跟踪性能曲线如图2所示。以载噪比35dB/Hz(正常室外信号较低水平)为例,测得环路最优带宽约为25Hz,最小跟踪误差约为7°。
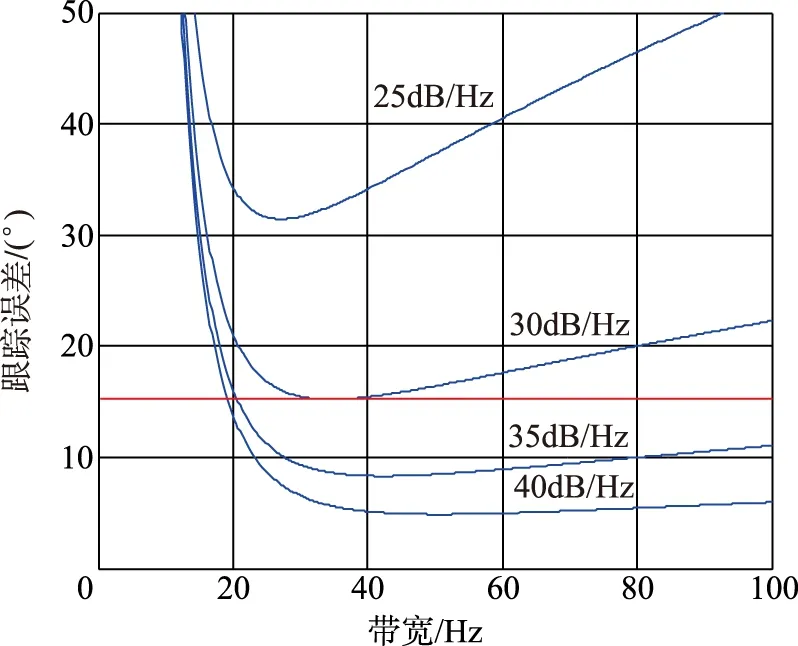
图2 三阶环路跟踪性能曲线Fig.2 Curve of three-order loop in tracking capability
1.2 不同精度等级惯性辅助性能分析
基于多普勒辅助的卫星跟踪环路架构如图3所示,利用修正后的惯性信息实时计算多普勒频移,并转换为载波NCO修正量,补偿到载波NCO中。
当采用惯性多普勒辅助环路时,载体的动态基本上能够由惯性信息补偿,动态应力误差转化为惯性器件的误差[2]
(6)
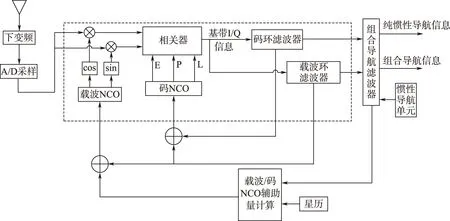
图3 基于惯性辅助的卫星跟踪环路架构图Fig.3 Architecture of the satellite tracking loop based on inertial assistance
惯性器件误差与载体速度误差之间的关系为[3]
(7)
其中,ΔV为载体速度误差,δV为载体速度误差变化率,B为加表的零偏,D为陀螺的漂移,g为重力加速度,α(0)为初始姿态角误差。
由式(6)和式(7)可以看出,惯性器件的精度水平影响跟踪误差的大小。不同精度水平惯性辅助下深组合环路跟踪灵敏度如图4所示。
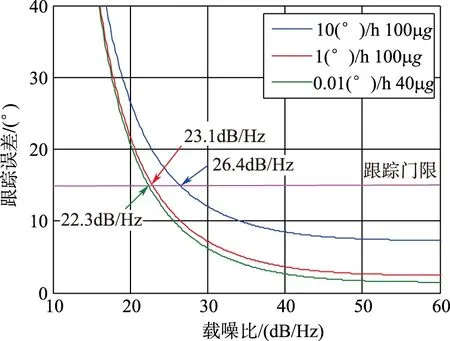
图4 不同精度水平惯性辅助下深组合环路跟踪灵敏度Fig.4 Tracking sensitivity of deep integration loop aided by different inertial level
由图4可知,在同一载噪比的条件下,惯性器件精度越高,跟踪误差越小;在同一跟踪误差门限的条件下,惯性器件精度越高,环路跟踪灵敏度越高。下文对惯性多普勒辅助下环路性能进行分析仿真。
1.3 跟踪能力分析
对于载波跟踪环路而言,环路带宽越大,对高动态跟踪能力的提升越大。而对于惯性多普勒辅助的深组合环路,载体动态性能可由修正后的惯性信息实时精确估计,从而降低高动态性能对环路带宽的依赖性[4]。
下面通过仿真来说明惯性多普勒辅助对环路动态性能的提升。设定跟踪载噪比为35dB/Hz的信号,载体加加速度设为10g/s,相关积分时间为1ms。图5为高动态条件下有无辅助环路跟踪性能的对比曲线。
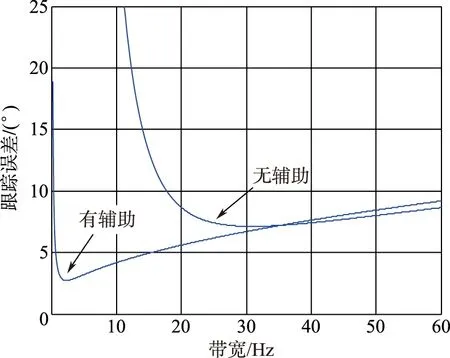
图5 环路跟踪性能对比曲线Fig.5 Comparative curve of theloop in tracking capability
由图5可知,惯性多普勒辅助环路最优带宽为3Hz,跟踪误差约为3°;无辅助环路最优带宽为25Hz,跟踪误差约为7°。在惯性辅助下,环路带宽压缩约88%,跟踪误差降低约57%。由此说明,相比普通环路,基于多普勒辅助的深组合技术可大幅度降低带宽和跟踪误差,显著提升高动态跟踪能力。
1.4 抗干扰能力分析
在1.3节分析的基础上,图6给出了最优带宽条件下(有辅助为3Hz,无辅助为25Hz),有无辅助环路跟踪误差与信号载噪比关系曲线,相关积分时间为1ms。
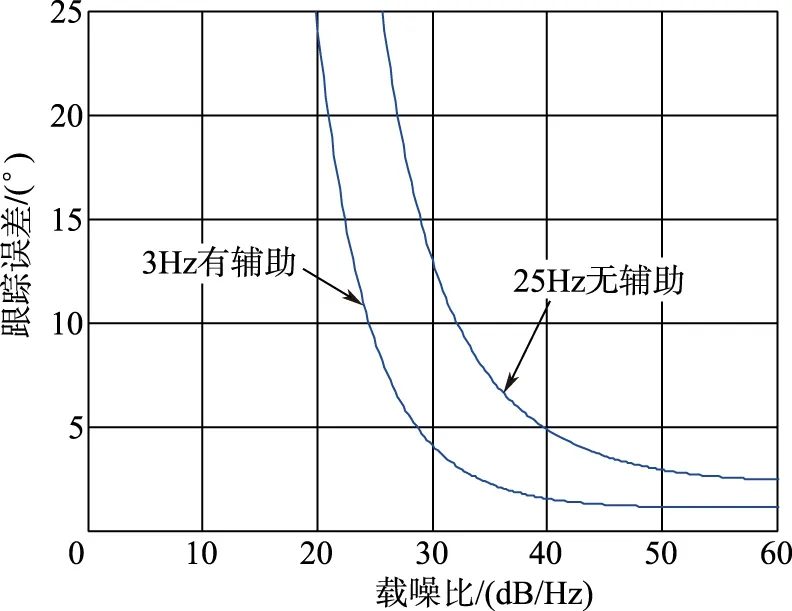
图6 跟踪误差与信噪比关系曲线Fig.6 Curve of the tracking error and SNR
曲线与15°门限的交点对应的载噪比,即该带宽环路能够跟踪的最低信号载噪比值。从图6中可以看出,有辅助的最低信号载噪比值约为24dB/Hz,无辅助的最低信号载噪比值约为32dB/Hz。由此可见,惯性多普勒辅助使得环路在压缩带宽的同时,还能够跟踪载噪比更低的信号,提升了环路跟踪灵敏度。
干扰与信号功率比J/S与载噪比的关系为
(8)
其中,(C/N0)eq为干扰出现时等价的载噪比,C/N0为无干扰时信号的载噪比,fc为码速率,P为调整系数(窄带干扰为1,宽带干扰为2)。
在GPS系统中,以100W功率干扰源为例,根据式(8)得到有无惯性辅助条件下抗干扰性能,如表1所示。
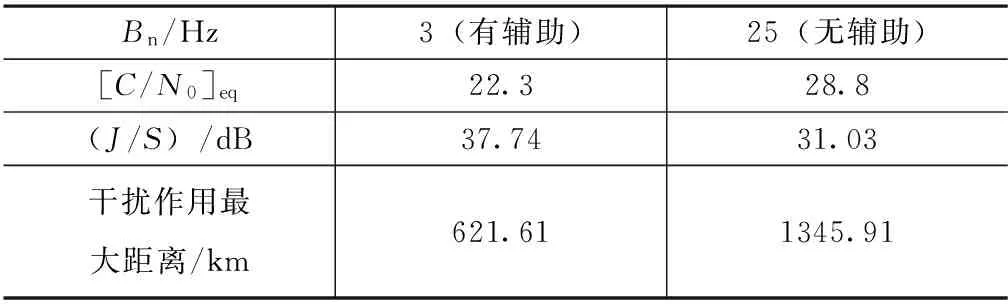
表1 不同带宽抗干扰能力表Tab.1 Anti-jamming capability of different bandwidth
由表1可以看出,追踪同一信号,在最优带宽的条件下,有辅助环路比无辅助环路抗干扰性能提升约6.7dB,干扰源干扰作用最大距离压缩了约54%。
2 惯性多普勒辅助深组合环路方案设计
根据辅助实现形式的不同,惯性多普勒辅助深组合环路可分为速度辅助和加速度辅助两种方式[5]。
2.1 速度辅助
速度辅助是利用组合修正后的惯性导航位置与外部星历信息计算接收机与卫星之间视线方向上的单位矢量,基于惯性速度和加速度信息推算下一时刻多普勒频移,并估计本地载波频率,以此作为跟踪环路中心频率来辅助对载波环路的跟踪。
(9)

计算载体和i通道卫星相对速度在径向方向上的投影为
(10)

下一时刻i通道多普勒频移为
(11)
其中,fIF为GPS信号L1波段载波频率,C为光速。
在此基础上得到本地载波中心频率为
(12)
将这一频率作为下一时刻NCO的中心频率,从而起到辅助跟踪环路的作用。但载波环路不仅要求本地载波频率和输入信号载波频率相等,而且要求两者的相位相等。由于惯性速度和加速度本来就存在误差,因此将f作为载波环路的中心频率,而不能直接用f作为下一时刻的本地载波频率。
2.2 加速度辅助
加速度辅助是指根据惯性加速度信息,预测出下一时刻输入信号载波频率的变化量,并将其直接补偿到本地载波的输出,从而消除环路动态应力。
(13)
在此基础上得到载体相对于卫星的加速度为
(14)
卫星信号多普勒频移的增量为
(15)
加速度辅助模式下应用辅助信息时,将估算出的各通道多普勒频移增量加至相应通道载波跟踪环路NCO的中心频率上,用作下一时刻载波频率产生的基准,即可起到对跟踪环路辅助的作用。
2.3 速度辅助环路详细处理方案
速度辅助与加速度辅助本质上都是利用惯性动态信息补偿环路动态应力误差,本节以速度辅助为例,给出惯性信息参与下环路处理方案。
普通接收机由捕获转到跟踪状态后,对环路基准频率进行一次修正,记修正后的环路频率为fBase,NCO频率调整量fNCOi进行累加运算,则环路更新时刻环路频率表示为fBase+∑fNCOi,环路频率更新如图7所示。
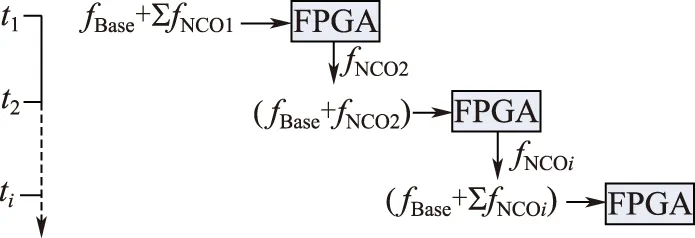
图7 普通环路频率变化过程Fig.7 Changing process of thefrequency of the normal loop
在速度辅助模式下,通过载体与卫星的相对速度计算得到载波多普勒频移,记为fdop,在此基础上得到跟踪环路频率,记为f=fIF+fdop,其中,fIF为卫星跟踪环路中频频率。在具体实现过程中,处理方法如下。
接收机在收到辅助频率信息f后,设置跟踪环路基准频率为f,环路NCO累加值清零,后续更新时刻环路NCO频率进行累加,环路频率为f+∑fNCOi。在下一个惯性辅助频率到来后,重新设置环路基准频率,环路NCO清零,重复此过程。由此便可完成环路频率的更新,环路频率变化过程如图8所示。

图8 速度辅助环路频率变化过程Fig.8 Changing process of thefrequency of the loop aided by speed
3 试验与结果分析
在对惯性多普勒辅助深组合技术优势和环路处理方案进行研究的基础上,本章针对无辅助环路和速度辅助环路进行了仿真试验。设计高动态轨迹如表2所示。

表2 动态轨迹表Tab.2 Dynamic track table
仿真实验采用陀螺漂移为0.01(°)/h、加速度计零偏40μg的惯性器件,辅助环路周期为1ms(按式(9)推算得到1ms周期的速度信息),环路带宽为3Hz,无辅助环路带宽为25Hz,卫星信号载噪比设置为35dB/Hz。
图9和图11分别给出了无辅助环路通道和速度辅助环路通道的I_P值(同相支路的即时码相关积分值)。
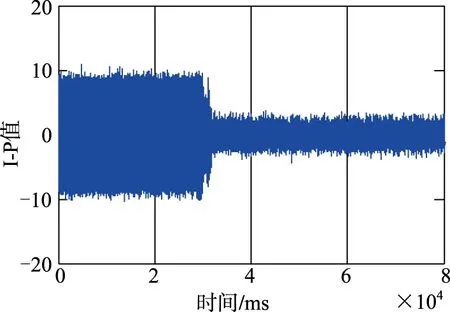
图9 无辅助环路通道I_P值Fig.9 IP value in the channel of the normal loop
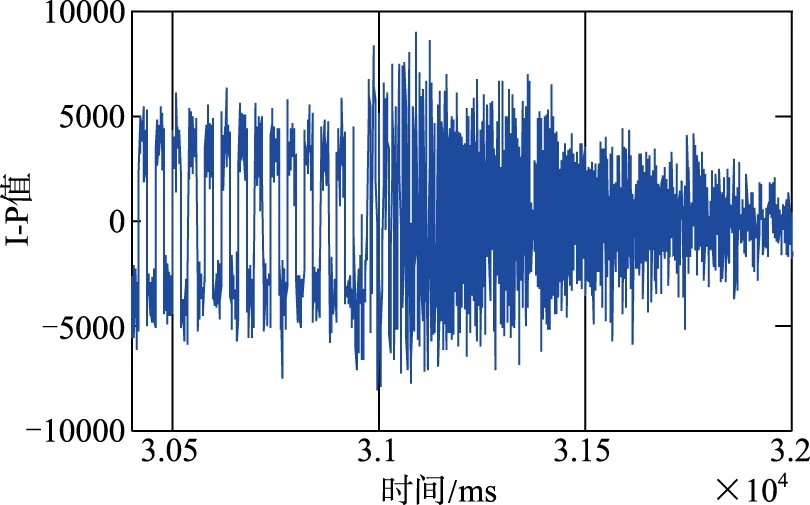
图10 局部放大图(图9)Fig.10 Enlarged view of figure 9
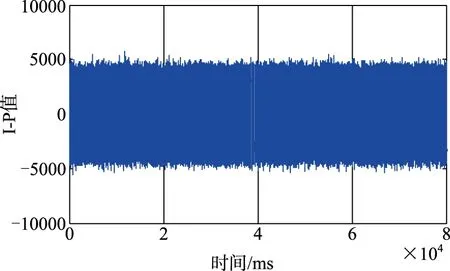
图11 速度辅助环路通道I_P值Fig.11 IP value in the channel of the loop aided by speed
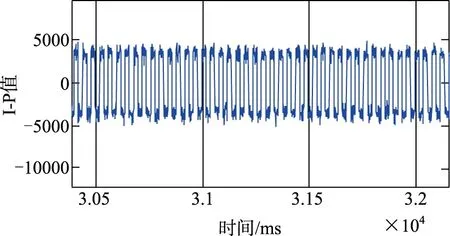
图12 局部放大图(图11)Fig.12 Enlarged view of figure 11

图13 多普勒频率及加速度变化曲线Fig.13 Changing curve of theacceleration and the frequency of Doppler
由图13中曲线可以看出,在上述仿真条件下,当载体加速度增加到一定程度时(约40g),无辅助环路开始失锁,无法维持对信号的可靠跟踪,而速度辅助环路则一直保持对输入信号的精确相关,多普勒频率随载体速度变化稳定更新,可在25g/s加加速度、50g加速度、2450m/s速度的动态条件下实现稳定跟踪。
4 结论
本文基于卫星导航载波跟踪环路误差模型,仿真分析了不同精度等级惯性辅助对环路的影响,量化分析了惯性多普勒辅助对环路性能的提升效果;在此基础上给出了两种惯性辅助环路方法,结合卫星导航环路处理流程提出了速度辅助环路实现方案。结果表明,在文中仿真条件下,惯性多普勒辅助技术能够实现在25g/s加加速度、50g加速度高动态环境下对卫星信号的稳定跟踪。
后续将在理论分析的基础上,开展惯性辅助载波跟踪环路高动态跟踪能力和抗干扰能力跑车试验验证,为深组合技术研究与应用提供支撑。
[1] 谢钢.GPS原理与接收机设计[M].电子工业出版社,2009.7.
[2] 唐康华,吴美平,胡小平.MEMS +IMU辅助的高性能GPS接收机设计[J].测绘学报,2008,37(1):129-131.
[3] Kreyec,Eisssfellerb,Ameresg.Architectures of GNSS/INS Integrations-theoretical Approach and Practical Tests[EB/OL].http://forschung.unibw-muenchen.de/papers/gawoe8szerl4vfleb015xj038yybw.pdf,2004-09-20.
[4] HUAN Hao,ZHAO Yu-mei,TAO Ran,WANG Gui-ying. Ca-rrier tracking loop for high-dynamic spread spectrum signals aided by estimation of Doppler rate[A].ICSP2012 Proceedings[C].Guangxi,2012,1378-1383.
[5] Moon Suk Koo,Hyun-min Ji,Deok Won Lim,Sang Heon Oh,Dong-Hwan-Hwang.NCO command generator design for the ultra-tightly coupled GPSINS integrated navigation system method[A].Proceedings of 11th International Conference on Control,Automation and Systems[C].Korea,2011,1626-1630.
Research on Deep Integration of Inertial/Satellite Technology Based on Doppler Assistance
XUE Tao,WANG Kang,GE Wen-tao,LI Wei,CHEN An-sheng
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
To satisfy the requirements of the applications of the high-accuracy navigation,the effects of different accuracy classes of the inertial assistance to the loop were simulated,which based on the loop error model of the satellite navigation.It was quantifiably analysed that the upgrade effect of the loop which aided by Doppler.Also,the implement method of Doppler assistance was given and the scheme for implementation of the loop which aided by speed was proposed in conjunction with the process of the loop of the satellite navigation.Simulation experiment was proceeded which based on high dynamic trajectory.The results showed that the deep integration of inertial/satellite technology,which aided by Doppler,can effectively improve the capability of the loop on high dynamic tracking.And with the assistance of the inertial information,the signal of the satellite can be stably tracked in the high dynamic environment of 25g/s jerk and 50gacceleration.
Doppler assistance;Deep integration;High dynamic;Anti-jamming
2015 - 09 - 22;
2015 - 10 - 20。
薛涛(1990 - ),男,硕士,助理工程师,主要从事组合导航技术研究。
E-mail:xuetao925@nuaa.edu.cn
TP391
A
2095-8110(2015)06-0025-07
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
城市道桥与防洪(2022年1期)2022-02-25
河北工业大学学报(2021年4期)2021-09-23
河北电力技术(2021年2期)2021-07-29
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
现代防御技术(2017年2期)2017-05-13
