
小型化MEMS制导仪标定与误差补偿方法研究
2015-03-10 07:09陈瑞娟吴春梅
导航定位与授时 2015年6期
陈瑞娟,吴春梅
(贵州航天控制技术有限公司,贵阳550009)
小型化MEMS制导仪标定与误差补偿方法研究
陈瑞娟,吴春梅
(贵州航天控制技术有限公司,贵阳550009)
为了提高某小型化制导仪中的低精度三轴MEMS(Micro-electromechanical Systems)陀螺仪的测量精度,建立了误差补偿模型,并基于三轴转台安排了标定试验,求得模型参数,并进行解耦验证。由于惯性器件温度漂移和温度测量过程中的滞后现象,针对陀螺仪进行-40℃~50℃的温度标定试验,采用一元高阶模型对陀螺仪温度漂移误差进行补偿,并通过MATLAB对该温度范围内的标定测试数据进行曲线拟合,得到零位相对温度变化的的拟合函数,并分离出相应的系数。试验结果表明,采用该种标定与误差补偿方法比传统方法节省了大量时间和人力,而且还能够快速标定出温度系数,从而有效地提高了陀螺仪的测量精度。
制导仪;三轴MEMS陀螺仪;误差补偿;标定
0 引言
低成本MEMS陀螺仪以其尺寸小、功耗低、重量轻在惯性测量系统中的应用越来越广泛,但目前低成本MEMS陀螺仪的使用精度较低仍然是影响其使用范围的主要原因。影响MEMS陀螺仪使用精度的因数主要由以下几方面构成:刻度因子、失准角、零偏、随机漂移等。但是对于低成本、低精度的微机械陀螺来说,传统的标定方法只能去除部分确定性误差,所以需要建立一种高精度的标定方法来尽可能地去除绝大部分确定性误差[1]。
在现有惯性测量装置中,广泛采取误差补偿技术来提高测量精度。影响惯性测量精度的误差源较多,要对这些误差源带来的测量误差进行补偿,需要针对每台产品进行误差标定试验,并分离出相应的误差系数。然而,惯性测量产品的误差系数标定试验费用都较高,所需补偿的误差项目越多,误差标定试验就越多,产品生产费用就越高,特别是为了得到精确温度误差补偿系数的标定试验,不仅需要价值昂贵的实验设备,还必须花去大量人工成本。
传统的MEMS温度系数的标定通常是利用温控转台在每个温度点经过长时间(至少2h)的保温,期间系统一直处于上电状态,温度步长一般选取为5℃或10℃,全温区或局部温区系数的标定一般用多个起始温度点的数据来进行差值。这种方法使得每个温度点的保温时间太长,导致标定效率下降,标定成本上升。另外,温度点的间隔较大,之间的温度点的性能通过差值实现,无法得到实际的精确值[2]。
因此,本文对某型号小型化制导仪的三轴MEMS陀螺仪的误差补偿方法进行了设计改进:1)误差系数采用常温下标定的一组系数代替全温范围的标定系数;2)零位误差标定,从温度为-40℃~55℃的过程中持续进行零位测试,采用一元高阶数学模型,通过MATLAB对该温度范围内的标定测试数据进行曲线拟合,得到零位相对温度变化的的拟合函数,并分离出相应的系数。仿真结果表明,采用该种标定与误差补偿的方法比传统方法节省了大量时间和人力,而且还能够快速标定出温度系数,从而有效地提高了三轴MEMS微机械陀螺仪的测量精度。
1 三轴MEMS陀螺仪数学模型的建立
某型号制导仪三轴MEMS陀螺仪中X、Y、Z通道输出量数学模型为:
(1)
式中:Kω(x)、Kω(y)、Kω(z)——分别为陀螺仪x、y、z轴通道的标度因数,^/[(°)/s];
Nωx、Nωy、Nωz——分别为陀螺仪x、y、z轴通道输出脉冲数,^;
DF(x)、DF(y)、DF(z)——分别为x、y、z轴陀螺仪通道的常值漂移,(°)/s;
ωx、ωy、ωz——分别为陀螺仪x、y、z轴的输入角速度,(°)/s;
Eij——陀螺仪第j轴与制导仪第i轴的夹角余弦(i=x、y、z;j=x、y、z)。
2 三轴MEMS陀螺仪误差系数的计算
2.1 三轴MEMS陀螺仪的速率标定方法及数据采集
在数据采样前先给制导仪上电8s左右进行预热,陀螺即可达到稳定的工作状态,在上电8s时间内不进行数据采集,8s后开始测试,采样5min零位数据。然后进行常温速率标定,制导仪启动8s后开始测试。速率标定试验按表1、表2、表3所示依次完成三个轴向的试验。
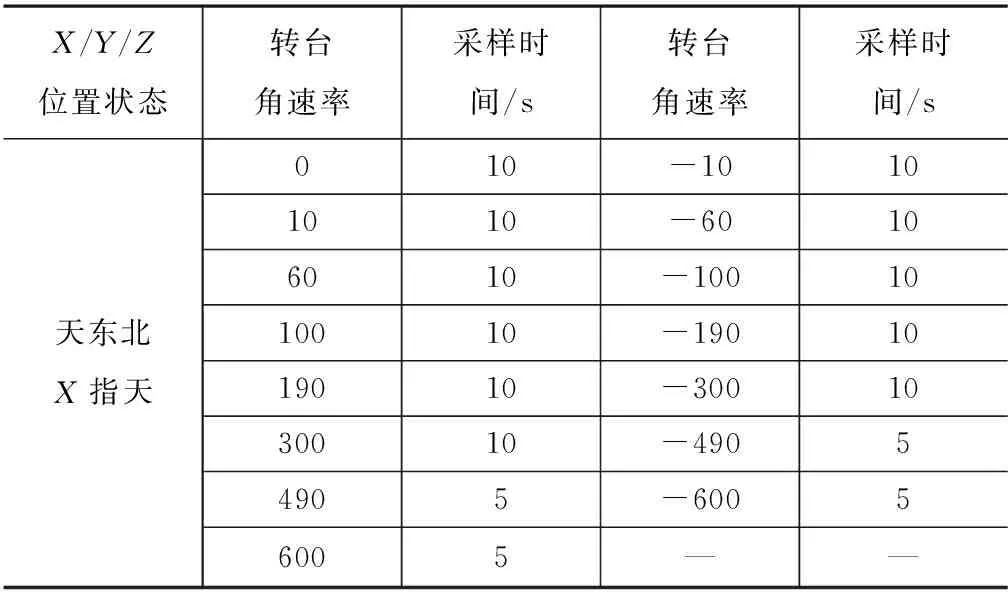
表1 X轴速率标定方法
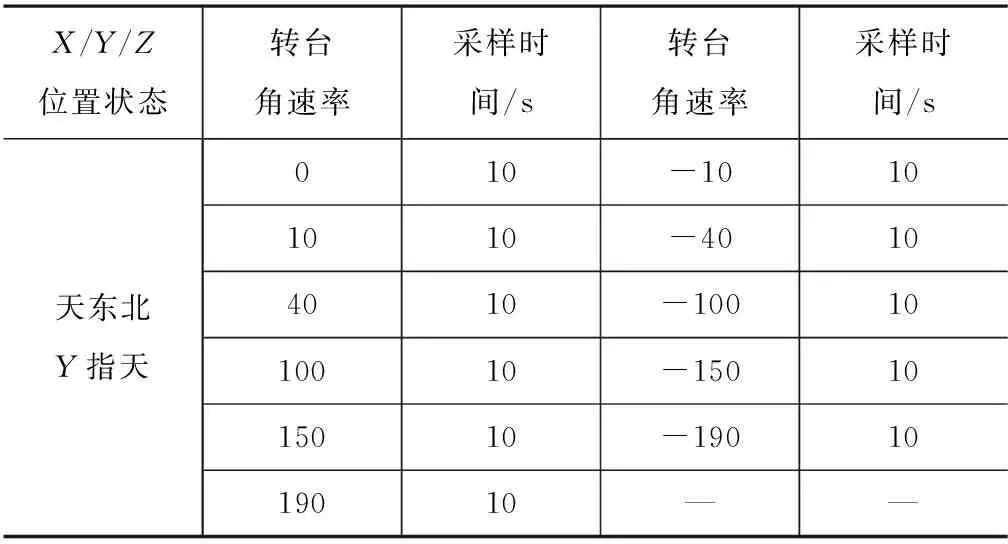
表2 Y轴速率标定方法Tab.2 Speed calibration method of Y-axis
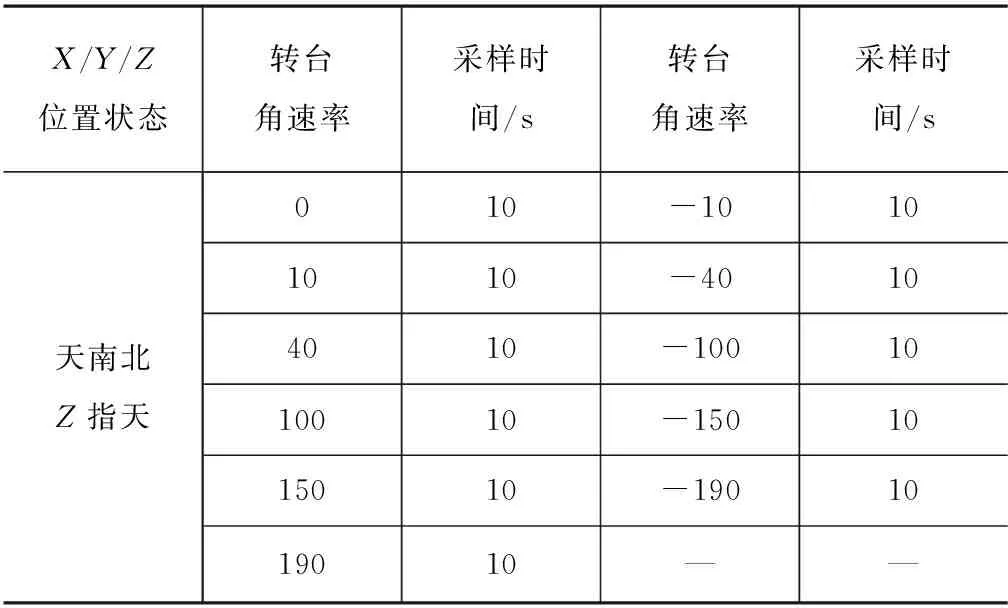
表3 Z轴速率标定方法Tab.3 Speed calibration method of Z-axis
2.2 误差系数的解算
利用误差模型和上述标定方法进行标定并求10组试验数据均值,求得陀螺仪标度因数LSB/[(°)/s]
陀螺仪零偏[(°)/s]
安装误差矩阵
2.3 补偿模型
在误差系数解算完后,对MEMS陀螺仪的数学模型进行验证,将数学模型进行逆运算求的ωx、ωy、ωz的输出值。补偿模型见式(3)
(3)
其中:
令
则由以上的推导可以得出式(4):
(4)
式(4)中,ωx、ωy、ωz分别为X、Y、Z轴输出角速度,S11、S12、S13、S21、S22、S23、S31、S32、S33为常温标定的误差系数,Nω(x)、Nω(y)、Nω(z)为零位误差,Nωx、Nωy、Nωz为陀螺仪通道输出脉冲数。
2.4 温度误差模型参数标定及补偿
为了对陀螺仪的温度漂移误差进行补偿,需要进行温度标定试验求取温度误差模型参数,针对某型号制导仪中三轴MEMS陀螺仪零偏的温度漂移,在-(40±2)℃~+(50±2)℃之间进行升降温温循试验(图1)。首先,将制导仪按X轴向上,Y轴、Z轴水平位置放置在高低温箱内,制导仪测试系统为制导仪供电8s后,开始5min零偏测试,测试结束后制导仪不断电。然后,将高低温箱从室温升温至+(50±2)℃,保温20min后开始测试,此时将高低温箱按2℃/min的速率开始降温,降温到-(40±2)℃,保温20min,然后将高低温箱再按2℃/min的速率开始升温,升温至+(50±2)℃,然后保温20min。温循过程中制导仪一直不断电,全程进行零偏测试。
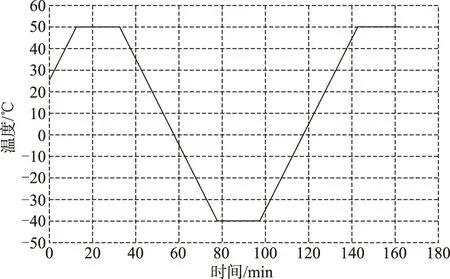
图1 陀螺仪温度试验温度曲线Fig.1 Temperature curve fortemperature test of gyroscope
针对陀螺仪的零位,选用一元高阶多项式模型对其进行建模,利用最小二乘法拟合得到X、Y、Z轴不同阶数模型参数,拟合后结果如图2~图4所示。
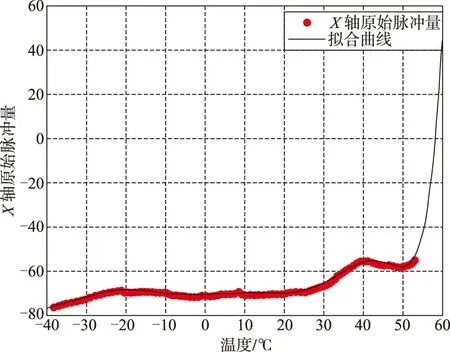
图2 陀螺仪X轴零偏拟合结果Fig.2 Bias fitting results of X-axis gyroscope
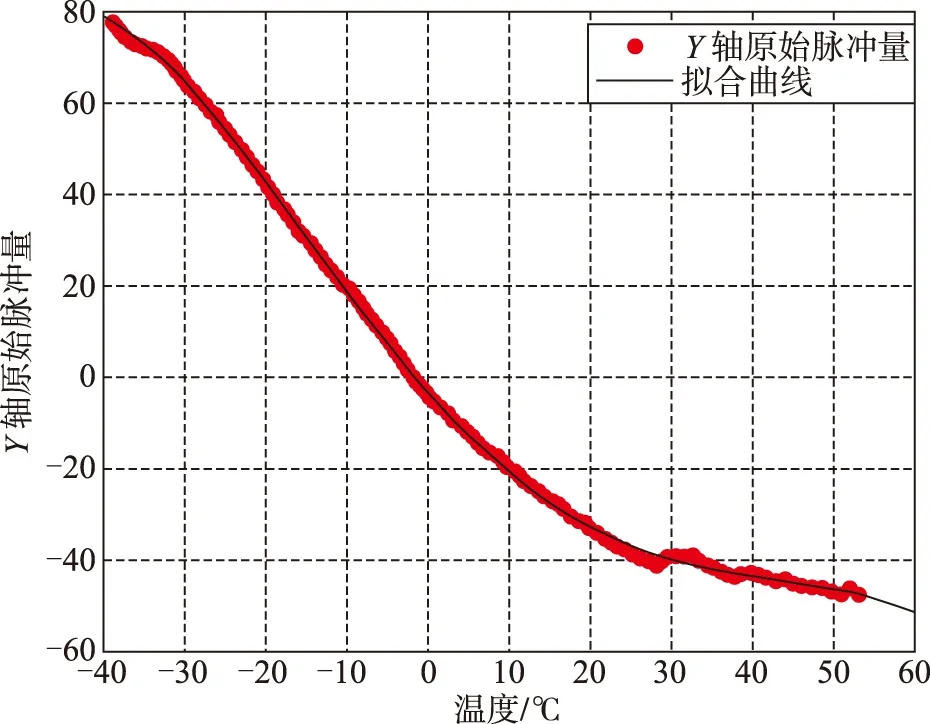
图3 陀螺仪Y轴零偏拟合结果Fig.3 Bias fitting results of Y-axis gyroscope
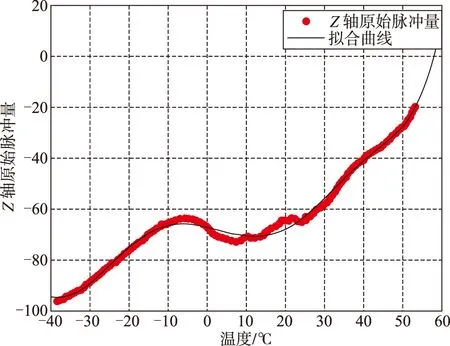
图4 陀螺仪Z轴零偏拟合结果Fig.4 Bias fitting results of Z-axis gyroscope
2.5 补偿后结果分析
利用求取的模型参数解耦陀螺输出数据,表4~表6中列出了解耦前后陀螺输出,通过对比(图5~图7)可以看出,解耦后安装误差对陀螺输出的影响明显减小。
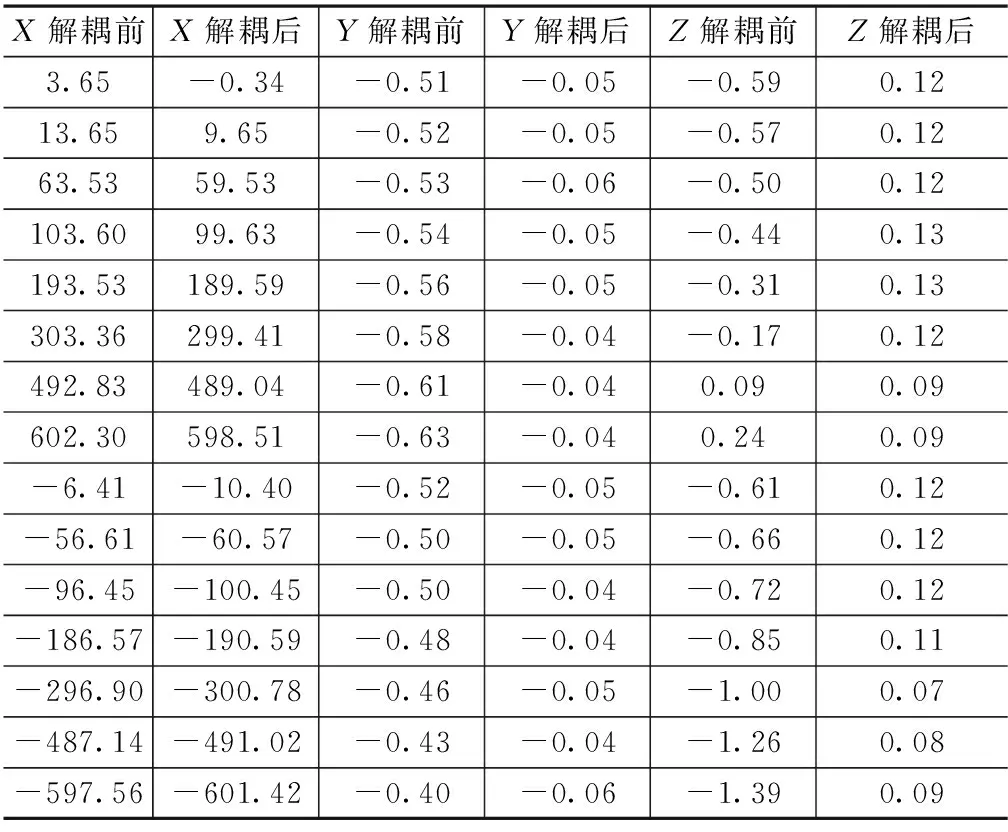
表4 X轴输入角速度解耦前后各轴陀螺仪输出Tab.4 Output for each axis before and after decoupling when inputting speed of X-axis gyroscope
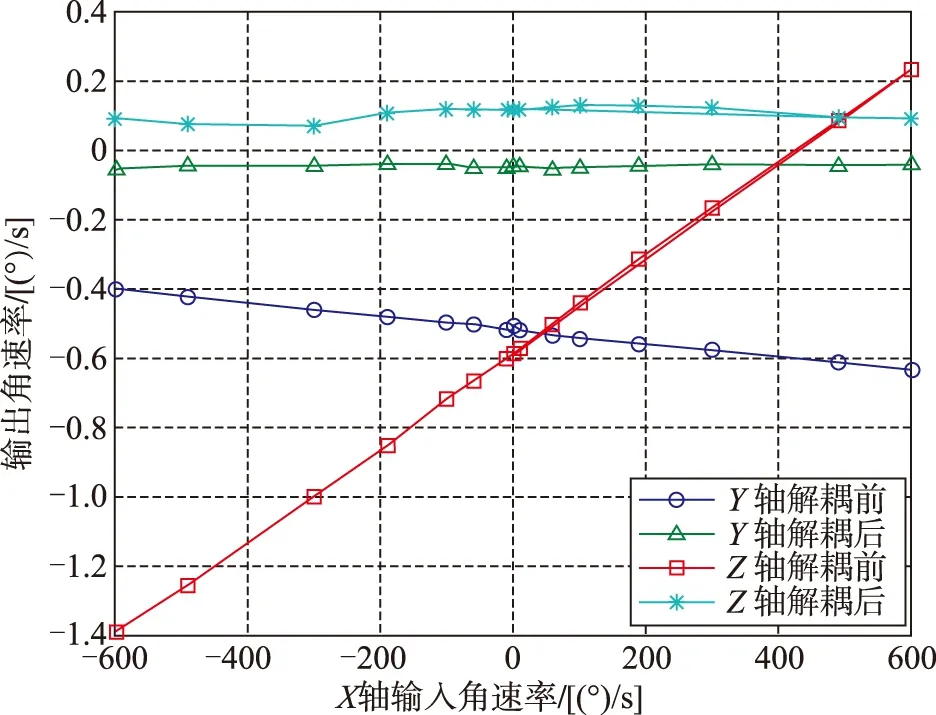
图5 X轴输入角速率解耦前后对比图Fig.5 Comparison Chart before and afterdecoupling when inputting speed of X-axis gyroscope
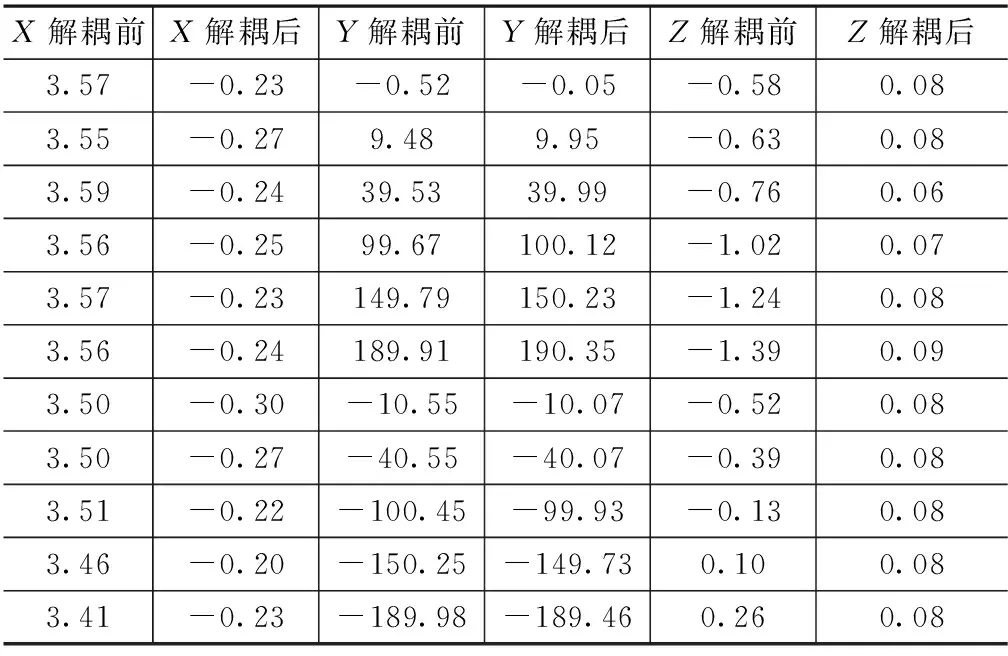
X解耦前X解耦后Y解耦前Y解耦后Z解耦前Z解耦后3.57-0.23-0.52-0.05-0.580.083.55-0.279.489.95-0.630.083.59-0.2439.5339.99-0.760.063.56-0.2599.67100.12-1.020.073.57-0.23149.79150.23-1.240.083.56-0.24189.91190.35-1.390.093.50-0.30-10.55-10.07-0.520.083.50-0.27-40.55-40.07-0.390.083.51-0.22-100.45-99.93-0.130.083.46-0.20-150.25-149.730.100.083.41-0.23-189.98-189.460.260.08
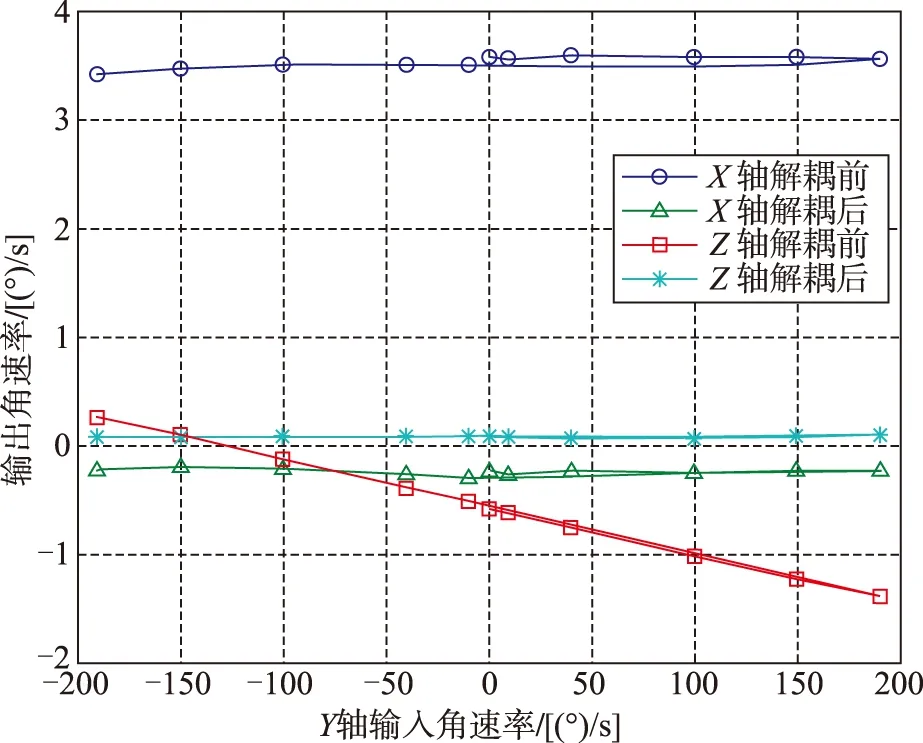
图6 Y轴输入角速率解耦前后对比图Fig.6 Comparison Chart before and afterdecoupling when inputting speed of Y-axis gyroscope
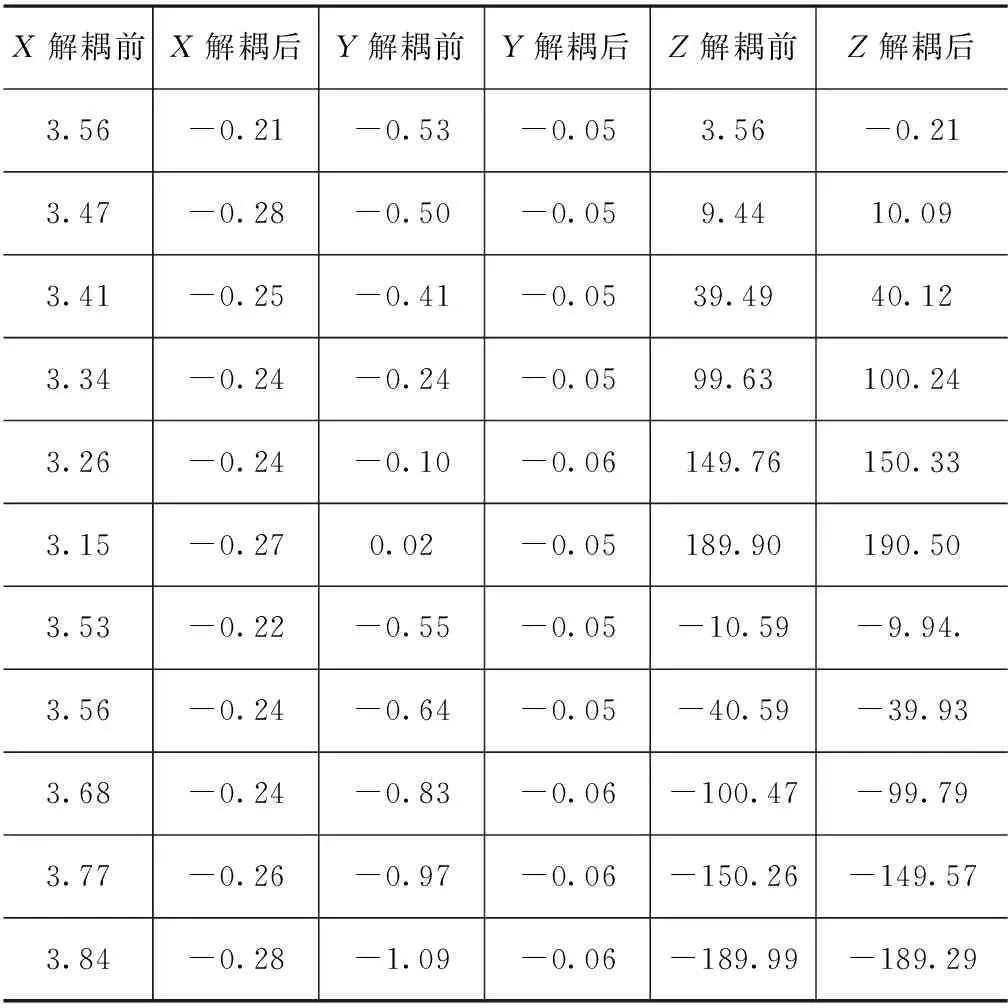
X解耦前X解耦后Y解耦前Y解耦后Z解耦前Z解耦后3.56-0.21-0.53-0.053.56-0.213.47-0.28-0.50-0.059.4410.093.41-0.25-0.41-0.0539.4940.123.34-0.24-0.24-0.0599.63100.243.26-0.24-0.10-0.06149.76150.333.15-0.270.02-0.05189.90190.503.53-0.22-0.55-0.05-10.59-9.94.3.56-0.24-0.64-0.05-40.59-39.933.68-0.24-0.83-0.06-100.47-99.793.77-0.26-0.97-0.06-150.26-149.573.84-0.28-1.09-0.06-189.99-189.29
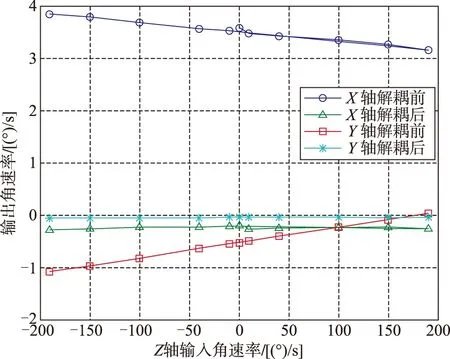
图7 Z轴输入角速率解耦前后对比图Fig.7 Comparison Chart before andafter decoupling when inputting speed of Z-axis gyroscope
通过对比可以看出,对于陀螺仪而言解耦前随着角速率输入的增加,安装误差引起的耦合角速率误差也随之增加,通过标定参数解耦后安装耦合误差急剧下降,不再随着角速率输入的变化而变化。
3 总结
本文利用改进的标定试验方法对某型号制导仪中三轴MEMS陀螺仪进行数据采集,以陀螺仪的输出为衡量指标,建立了误差补偿模型,求得模型参数,并利用模型对输出进行解耦。同时采用一元高阶温度模型对陀螺仪温度漂移误差进行补偿,并通过MATLAB对该温度范围内的标定测试数据进行曲线拟合,得到零位相对温度变化的拟合函数,并分离出相应的系数。仿真及试验结果表明,采用该种标定与误差补偿的方法比传统方法节省了大量时间和人力,而且还能够快速标定出温度系数,从而有效地提高了陀螺仪的测量精度。
[1] 乔会敏,张嘉易,等.一种微机械陀螺仪误差的高精度补偿方法[J].理论与方法,2012,31(8):18-20,30.
[2] 罗兵,吴美平,等.微机械陀螺温度系数的快速标定方法[J].传感技术学报,2010,23(10):1444-1448.
[3] 韩旭.MIMU标定及误差补偿技术研究[M].南京理工大学,2014.
[4] 许德新,何昆鹏,等.MEMS惯性测量组件的温度误差补偿模型研究[J].哈尔滨工程大学学报,2010,31(5):607-613.
Research on Calibration and Error Compensation Technology ofMiniaturization MEMS Micro-mechanical Missile Director
CHEN Rui-juan,WU Chun-mei
(Guizhou Aerospace Control Technology Co.,Ltd.,Guiyang 550009,China)
In order to improve the measure performance of low-accuracy three axes MEMS(Micro-electromechanical Systems)gyroscope which is in the miniaturization missile director,the error compensation model of gyroscope was analyed.Based on three axes turntable,calibration experiment has been implemented.Parameters got in the experiment have been used to decouple.Because of the inertial sensor temperature drift and temperature hysteresis,calibration experiments from -40℃ to 50℃ have been implemented.High order model of one variable has been used to compensation temperature drift of gyroscope.Use of calibration data,curve fitting method can be employed to get fitting function and to extract corresponding coefficients.The results show that this calibration-compensation method could save us much time and manpower,further more it could effectively improve the measure accuracy of the gyroscope.
Missile director;Three axes MEMS gyroscope;Error compensation;Calibration
2015 - 04 - 28;
2015 - 07 - 28。
陈瑞娟(1985 - ),女,设计员,主要从事电路设计及补偿方面的研究。
E-mail:ruijuan123456@163.com
V249.3
A
2095-8110(2015)06-0075-06
猜你喜欢
科学与信息化(2021年12期)2021-12-27
北京航空航天大学学报(2021年9期)2021-11-02
炼油技术与工程(2021年4期)2021-05-03
客车技术与研究(2019年5期)2019-10-24
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
