
基于能量成型的永磁同步直线电机控制研究
2015-05-15 01:52焦留成
郑州大学学报(工学版) 2015年3期
焦留成,姚 涛
(郑州大学电气工程学院,河南郑州450001)
基于能量成型的永磁同步直线电机控制研究
焦留成,姚 涛
(郑州大学电气工程学院,河南郑州450001)
针对永磁同步直线电机(LPMSM)速度控制问题,从能量成型的观氛出发,将其看作能量转换装置,采用端口受控耗散哈密顿(PCHD)理论推导出LPMSM系统的端口受控哈密顿模型.在哈密顿结构基础上利用互联和阻尼配置,给出闭环系统期望的哈密顿函数,对速度控制器进行了设计.设计中直接采用哈密顿函数作为存贮函数,使系统在满足无源性的条件下达到了要求的性能,具有明确的物理意义.仿真结果表明,设计的闭环控制系统能够快速响应负载阻力的变化,具有良好的鲁棒性.
永磁同步直线电机;能量成型;端口受控哈密顿;互联和阻尼配置;速度控制器
0 引言
永磁同步直线电机(LPMSM)伺服系统要求设计的控制器能够实现高精度、高动态性能、大范围地调速或定位控制[1].但LPMSM是一种结构不对称、非线性的机电能量转换装置,受到电机端部效应、负载扰动等不确定性因素的影响,采用常规控制器设计的系统难以达到理想的控制效果[2].具有互联与能量成型的非线性控制方法的主要特征是被控系统具有端口受控耗散哈密顿(PCHD)结构,根据PCHD系统特有的反馈镇定方法,使系统的控制器设计与稳定性分析更加容易,因而受到广泛关注[3-5].于海生等[5]采用PCH方法研究了PMSM的速度控制,具有较好的刚度阻尼和较强的鲁棒稳定性.基于PCH方法设计LPMSM的位置控制器,具有良好的可靠性和稳定性[6-8].笔者从能量成型的观点出发,基于端口受控耗散哈密顿系统的无源控制实现方法,利用互联和阻尼配置,对永磁同步直线电机调速系统控制器进行了设计.
1 PCHD系统无源控制实现方法
端口受控耗散哈密顿系统(被控对象)的模型[9]可以表示为

式中:状态变量x∈X(X为欧式空间);u为输人变量;y为输出变量;R(x)≥0为依赖于x的半正定对称矩阵,反映了端口上附加的阻性结构; J(x)=-J(x)T为负对称矩阵,反映了系统内部的互联结构;H(x)为能量函数[10].若H(x)有下界,则式(1)为一无源系统.
对应的控制系统的模型可以表示如下:

式中:状态变量ξ∈XC(XC亦为欧式空间).
将被控系统和控制系统通过端口互联,并满足如下条件:

式中:e、eC为外部输人反馈信号.
互联端口受控耗散系统结构图如图1所示.
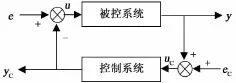
图1 互联结构端口受控耗散系统Fig.1 Interconnect port-controlled dissipative systems
从而得到闭环系统表达式为
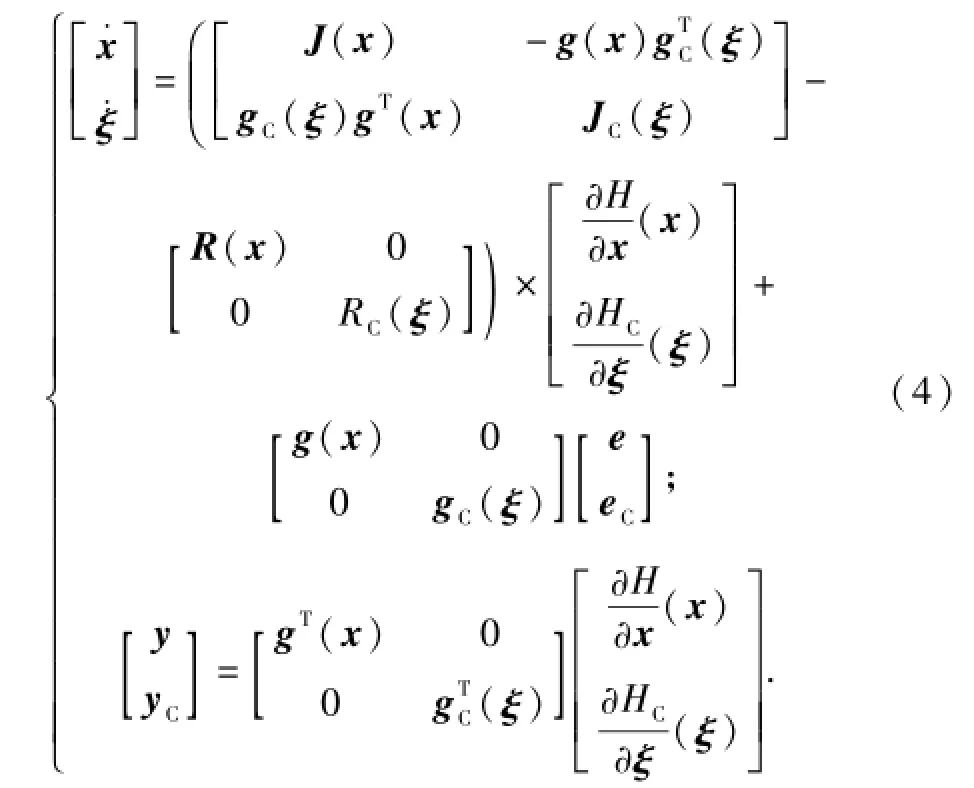
在闭环系统(4)的互联结构基础上,采用阻尼配置的无源控制方法(IDA-PBC),即可完成对端口受控耗散哈密顿系统的控制.即通过反馈,对系统进行能量成型,通过阻尼注人将耗散加人到系统中,达到控制的目的[11].
2 基于IDA-PBC控制方法的永磁同步直线电机模型
永磁同步直线电机在满足磁场不饱和,忽略磁滞损耗、茹滞摩擦系数的条件下,在d-q坐标变换下的电压方程和机械特性方程如下[12]:

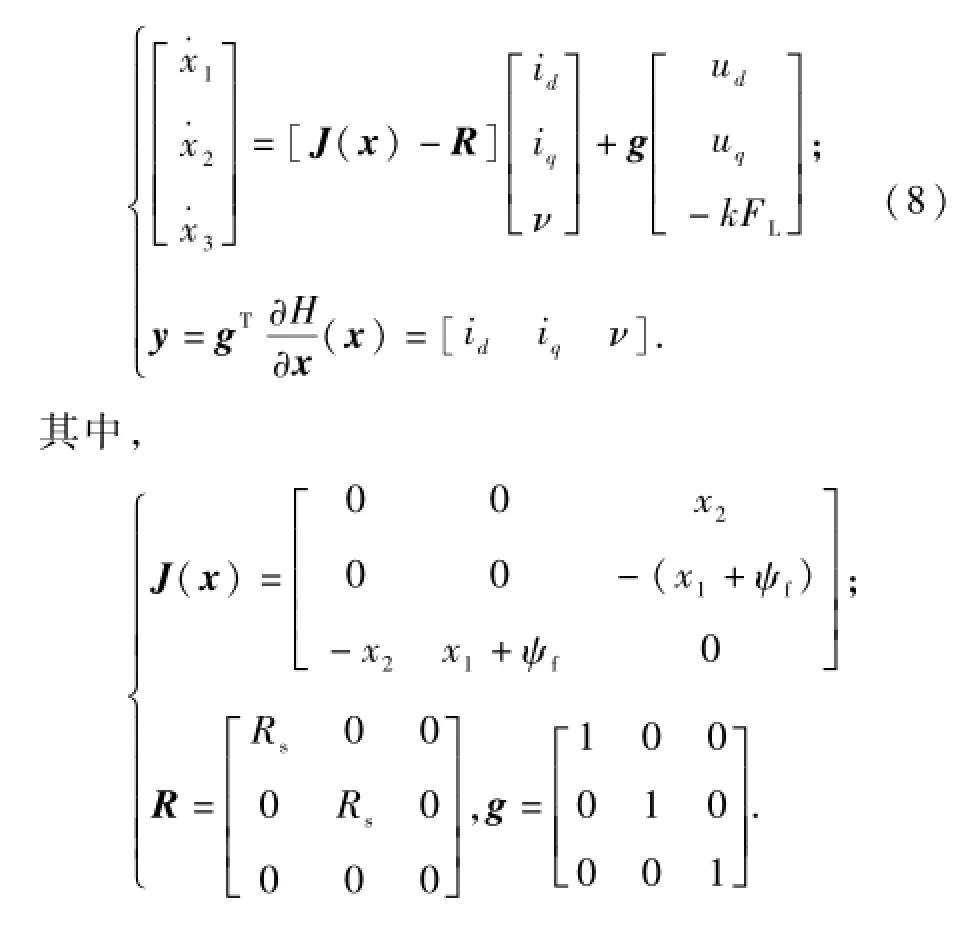
式中:id、iq、ud、uq、Rs分别为d-q轴坐标下的动子电枢电流、动子电枢电压、动子电枢绕组电阻; Ld、Lq为动子等效电枢电感;M为动子质量;v为电机速度;τ为极距;ψf为定子永磁体磁链;p为电机极对数;k=k为将LPMSM表示成端口受控哈密顿系统引人的参数;Fe为电磁推力;FL为负载阻力.
定义系统的状态x、输人变量u和输出变量y分别为

LPMSM系统的能量哈密顿函数可以表示为

永磁同步直线电机的端口受控耗散哈密顿系统数学模型可以描述为
3 PCHD系统的控制器设计
3.1 系统稳定平衡点的确定和控制器设计
为了将LPMSM系统(5)渐近稳定在平衡点x*=[,,]T,需要构造一个反馈控制后的闭环期望能量函数Hd(x),使它在x*处取最小值.同时寻找反馈控制律u=β(x),使得闭环系统成为·x=[Jd(x)-Rd](x)的形式.
当采用id=0电流控制方案,电机稳定运行速度为期望值时,有=ψ+(Ld-Lq)-kFL=0,可得=,即在平衡点处有

加人反馈控制u=β(x)后,选取闭环系统的哈密顿函数Hd(x)为

为不失一般性,选取

式中:J12、J13、J23为互联参数;r1、r2为增益系数.则有

其中,

在平衡点运行时,有Fe==,设定参数J=0,J=-J=0,得到反馈控制器:121323

3.2 稳定性分析
由式(10)可得

当x=x*时,有x)=0,并且有Hd的海森矩阵x)=D-1>0,因此满足稳定性判别条件[11],在反馈控制器(15)下的闭环系统是渐近稳定的.
4 系统实例仿真
经过理论推导得到的反馈控制器在Matlab环境中进行系统仿真实验如图2所示.控制器模块如图3所示.永磁同步直线电机参数如表1所示.

图2 PCH控制系统仿真图Fig.2 PCH control system simulation
调整增益参数r1、r2可以使系统达到满意的运行性能.选取r1=5,r2分别为0.05,1.1,2,5.5,结果如图4所示.在几组增益参数下,永磁同步直线电机速度控制系统都能够在期望速度值处保持稳定.但当r2过小时,系统会产生超调;r2过大时,系统动态响应时间延长;当r1=5,r2=1.1时,没有超调且动态响应时间较短.
对设计的速度控制系统进行突加负载阻力实验,选取r1=5,r2=1.1,FL初始值为10 N,当0.1 s时突变为20 N.由仿真结果图5和图6可以看出,在系统突加负载阻力时速度变化幅度小且很快恢复到期望值,系统能够快速响应负载阻力的变化,具有良好的抗干扰能力.

图3 控制器模块Fig.3 Controller module

表1 LPMSM的模型参数Tab.1 Model parameters of LPMSM

图4 不同增益参数下电机速度响应曲线Fig.4 The motor speed response curve based on different gain parameters
5 结论
针对LPMSM调速系统非线性特点,根据端口受控耗散哈密顿系统理论与无源性控制原理研究了系统的建模和控制.将LPMSM看作能量转换装置,推导出系统的端口受控耗散哈密顿模型.在哈密顿结构基础上,引人结构互联和阻尼配置,给出闭环系统期望的哈密顿函数,设计了LPMSM速度控制系统的无源控制器.仿真结果表明,系统具有较快的响应速度,并且对负载的变化具有良好的鲁棒性,控制器结构简单,只需调节2个参数,而且能够保证系统是渐进稳定的.因此,将能量成型方法应用到永磁同步直线电机调速系统中有很好的研究应用前景.
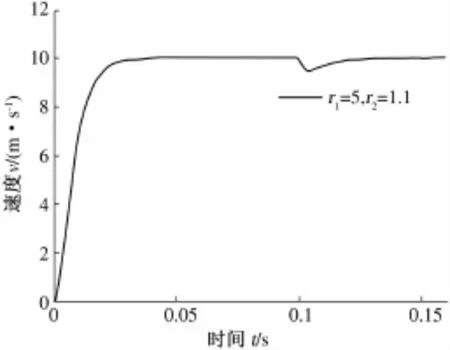
图5 负载阻力FL增大时速度响应曲线Fig.5 Speed response curve of sudden more load resistance FL
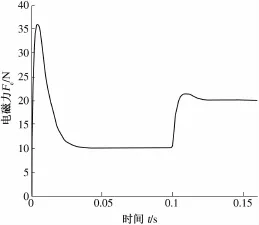
图6 电磁力Fe响应曲线Fig.6 Response curve of electromagnetic force Fe
[1] 叶云岳.直线电机技术手册[M].北京:机械工业出版社,2003.
[2] 龙志强,洪华杰,周晓兵.磁浮列车的非线性控制问题研究[J].控制理论与应用,2003,20(3):399-402.
[3] ORTEGA R,VAN DER SCHAFT A J,MAREELS I,et al.Putting energy back in control[J].IEEE Control System Magazine,2001,21(2):18-33.
[4] WANG Yu-zhen,CHENG Dai-zhan,LI Chun-wen,et al.Dissipative Hamiltonian realization and energybased l2-disturbance attenuation control of multimachine power systems[J].IEEE Transactions on Auto-matic Control,2003,48(8):1428-1433.
[5] 于海生,赵克友,郭雷,等.基于端口受控哈密顿方法的PMSM最大转矩/电流控制[J].中国电机工程学报,2006,26(8):83-86.
[6] 刘星桥,陈功,韩辉.基于端口受控哈密顿的永磁同步直线电机控制方法研究[C]//中国自动化学会控制理论专业委员会D卷.北京:中国自动化学会控制理论专业委员会,2011:624-628.
[7] 刘星桥,王燕,杨志华.一种永磁同步直线电机端口受控哈密尔顿系统下的自适应阻尼注人控制方法[J].电机与控制应用,2013,40(11):32-36.
[8] 刘星桥,袁泉.基于PCH的永磁直线同步电机L2增益扰动抑制控制系统的研究[J].微电机,2014,47 (4):43-48.
[9] 刘进,于海生,魏晓晨,等.异步电动机的端口受控哈密顿控制与L2增益扰动抑制[J].电机与控制应用,2011,37(10):10-15.
[10]OZKAN S.Hamilton decompositions of graphs with prim itive complements[J].EI Discrete Mathematics, 2009,309(14):95-98.
[11]ORTEGA R,VAN DER SCHAFT A,MASCHKE B,et al.Interconnection and damping assignment passivitybased control of port-controlled Hamiltonian systems[J].Automatica,2002,38(4):585-596.
[12]韩明文.永磁同步直线电机神经网络PID控制系统的研究[D].上海:华东理工大学电气学院,2013.
Research of LPMSM Control System Based on Energy Shaping
JIAO Liu-cheng,YAO Tao
(School of Electrical Engineering,Zhengzhou University,Zhengzhou 450001,China)
In view of the speed control problem of the linear permanent magnet synchronous motor(LPMSM), which is viewed as an energy-transformation device,from the viewpoint of energy shaping,app lying port-controlled Ham iltonian with dissipation and passivity-based control theory,the port-controlled Hamiltonian model of LPMSM is deduced.Based on the Hamiltonian structure,the desired Hamiltonian function of the closedloop system is given,and the speed controller is designed by using themethod of interconnection and damping assignment.In the design,the Hamiltonian function is used directly as the storage function,and the system can achieve the required performance and bring more definite physicalmeaning on the condition of satisfying passivity.The simulation results show that the closed-loop control system can respond quickly to changes in load resistance and has good robustness.
linear permanentmagnet synchronousmotor;energy shaping;port-controlled Ham iltonian;interconnection and damping configuration;speed controller
TP273
A
10.3969/j.issn.1671-6833.2015.03.001
1671-6833(2015)03-0001-05
2015-01-07;
2015-02-23
河南省科技攻关计划项目(142102210487)
焦留成(1950-),男,河南绳池人,郑州大学教授,博士,博士生导师,主要从事直线电机建模与控制研究, E-mail:jiaolc@zzu.edu.cn.
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
中国交通信息化(2020年4期)2021-01-14
南京大学学报(数学半年刊)(2020年1期)2020-03-19
中国惯性技术学报(2019年3期)2019-10-15
北方工业大学学报(2019年5期)2019-03-30
浙江理工大学学报(自然科学版)(2015年4期)2015-03-01
